Physik für Mediziner 9783110692921, 9783110692891
Kompakte Wissensvermittlung aller physikalischen Themengebiete des Vorphysikums. Herleitung der wichtigen Formeln und Gl
201 15 23MB
German Pages 378 [380] Year 2021
Inhalt
1 Einführung
2 Mathematische Methoden
3 Mechanik
4 Schwingungen & Wellen
5 Wärmelehre
6 Elektrizitätslehre
7 Optik
8 Atom- & Kernphysik
Lösungen
Stichwortverzeichnis
Recommend Papers


![Physik für Mediziner [16. Aufl.]
9783662613559, 9783662613566](https://ebin.pub/img/200x200/physik-fr-mediziner-16-aufl-9783662613559-9783662613566.jpg)


![Physik für Mediziner, Biologen, Pharmazeuten [7. neu bearb. Aufl.]
9783110211290](https://ebin.pub/img/200x200/physik-fr-mediziner-biologen-pharmazeuten-7-neu-bearb-aufl-9783110211290.jpg)
![Physik für Mediziner [17. Auflage]
3662664798, 9783662664797, 9783662664803](https://ebin.pub/img/200x200/physik-fr-mediziner-17-auflage-3662664798-9783662664797-9783662664803.jpg)
![Physik für Mediziner, Biologen, Pharmazeuten [Reprint 2013 ed.]
9783111682471](https://ebin.pub/img/200x200/physik-fr-mediziner-biologen-pharmazeuten-reprint-2013nbsped-9783111682471.jpg)
![Physik für Mediziner, Biologen, Pharmazeuten [2., überarb. Aufl. Reprint 2019]
9783111344324, 9783110076318](https://ebin.pub/img/200x200/physik-fr-mediziner-biologen-pharmazeuten-2-berarb-aufl-reprint-2019-9783111344324-9783110076318.jpg)

- Author / Uploaded
- Mustafa André Schmidt
File loading please wait...
Citation preview
Mustafa A. Schmidt Physik für Mediziner De Gruyter Studium
Weitere empfehlenswerte Titel Medical Physics Hartmut Zabel, 2017 Volume 1: Physical Aspects of Organs and Imaging ISBN 978-3-11-037281-6, e-ISBN (PDF) 978-3-11-037283-0, e-ISBN (EPUB) 978-3-11-037285-4 Volume 2: Radiology, Lasers, Nanoparticles and Prosthetics ISBN 978-3-11-055310-9, e-ISBN (PDF) 978-3-11-055311-6, e-ISBN (EPUB) 978-3-11-055317-8 Optofluidics Process Analytical Technology Dominik G. Rabus, Cinzia Sada, Karsten Rebner, 2019 ISBN 978-3-11-054614-9, e-ISBN (PDF) 978-3-11-054615-6, e-ISBN (EPUB) 978-3-11-054622-4 Praktische Labordiagnostik Lehrbuch zur Laboratoriumsmedizin, klinischen Chemie und Hämatologie Herausgegeben von: Harald Renz, 2018 ISBN 978-3-11-047376-6, e-ISBN: 978-3-11-048859-3, e-ISBN (EPUB) 978-3-11-047407-7 (EPUB) 978-3-11-047409-1 Pschyrembel Klinisches Wörterbuch Begründet von: Willibald Pschyrembel Bearbeitet von: der Pschyrembel-Redaktion des Verlages, 2020 ISBN 978-3-11-068325-7 https://www.pschyrembel.de/
Mustafa A. Schmidt
Physik für Mediziner |
Autor Dr. Mustafa André Schmidt Universität Gießen II. Physikalisches Institut Heinrich-Buff-Ring 16 35392 Gießen [email protected]
ISBN 978-3-11-069289-1 e-ISBN (PDF) 978-3-11-069292-1 e-ISBN (EPUB) 978-3-11-069297-6 Library of Congress Control Number: 2021938004 Bibliografische Information der Deutschen Nationalbibliothek Die Deutsche Nationalbibliothek verzeichnet diese Publikation in der Deutschen Nationalbibliografie; detaillierte bibliografische Daten sind im Internet über http://dnb.dnb.de abrufbar. © 2021 Walter de Gruyter GmbH, Berlin/Boston Umschlaggestaltung: Mustafa Schmidt Satz: le-tex publishing services GmbH, Leipzig Druck und Bindung: CPI books GmbH, Leck www.degruyter.com
Inhalt 1 1.1 1.2 1.3 1.3.1 1.3.2 1.3.3 1.4 1.4.1 1.4.2 1.4.3 1.4.4 1.4.5
Einführung | 1 Was ist Physik? | 1 Physik & Medizin | 2 Physikalische Größen | 3 Physikalische Einheiten | 3 Internationales Einheitensystem | 4 Stoffmenge & Atommasse | 6 Fehlerrechnung | 7 Fehlerarten | 7 Arithmetisches Mittel | 7 Standardabweichung | 8 Gaußverteilung | 9 Fehlerfortpflanzung | 11
2 2.1 2.2 2.2.1 2.2.2 2.2.3 2.2.4 2.2.5 2.3 2.3.1 2.3.2 2.3.3 2.4 2.4.1 2.4.2 2.4.3 2.4.4 2.4.5 2.5
Mathematische Methoden | 13 Übersicht | 13 Algebra | 13 Arithmetik | 13 Bruchrechnung | 16 Potenzen & Logarithmus | 17 Zehnerpotenzen | 20 Gleichungen | 22 Analysis | 24 Funktionen | 24 Differenzialrechnung | 28 Integralrechnung | 33 Vektorrechnung | 38 Definition | 38 Addition von Vektoren | 39 Skalarprodukt | 40 Vektorprodukt | 42 Vektoranalysis | 43 Zusammenfassung | 45
3 3.1 3.2 3.2.1 3.2.2
Mechanik | 47 Übersicht | 47 Kinematik | 47 Geschwindigkeit | 47 Beschleunigung | 49
VI | Inhalt
3.2.3 3.2.4 3.3 3.3.1 3.3.2 3.4 3.5 3.5.1 3.5.2 3.5.3 3.5.4 3.5.5 3.6 3.7 3.7.1 3.7.2 3.8 3.8.1 3.8.2 3.8.3 3.9 3.9.1 3.9.2 3.9.3 3.9.4 3.9.5 3.9.6 3.10 3.10.1 3.10.2 3.10.3 3.10.4 3.10.5 3.11 3.11.1 3.11.2 3.11.3 3.11.4 3.12 3.12.1 3.12.2 3.12.3
Allgemeines Weg-Zeit-Gesetz | 49 Würfe | 51 Dynamik | 57 Die Newton’schen Axiome | 57 Superpositionsprinzip | 58 Impuls | 60 Energie & Arbeit | 61 Definition | 61 Potenzielle Energie | 62 Kinetische Energie | 63 Energieerhaltung | 63 Leistung | 64 Hooke’sches Gesetz | 65 Rotation | 67 Winkelgeschwindigkeit | 67 Zentripetalkraft | 68 Stoßprozesse | 70 Zentraler inelastischer Stoß | 70 Zentraler elastischer Stoß | 71 Scheinkräfte | 73 Starre Körper | 73 Schwerpunkt | 74 Drehmoment | 76 Rotationsenergie & Trägheitsmoment | 78 Drehimpuls | 79 Satz von Steiner | 81 Translation & Rotation | 82 Reibung | 83 Bedeutung | 83 Haftreibung | 84 Gleitreibung | 84 Rollreibung | 84 Luftwiderstand | 85 Reale Körper | 86 Dehnung | 86 Kompression | 87 Scherung | 87 Torsion | 88 Gravitation | 89 Newton’sches Gravitationsgesetz | 89 Fluchtgeschwindigkeit | 91 Kreisbahngeschwindigkeit | 91
Inhalt |
3.12.4 3.13
Kepler’sche Gesetze | 92 Zusammenfassung | 95
4 4.1 4.2 4.2.1 4.2.2 4.2.3 4.2.4 4.3 4.3.1 4.3.2 4.3.3 4.3.4 4.3.5 4.3.6 4.4
Schwingungen & Wellen | 100 Übersicht | 100 Schwingungen | 100 Pendel | 101 Gedämpfte Schwingungen | 104 Erzwungene Schwingungen | 106 Fourier-Analyse | 107 Wellen | 110 Wellenfunktion | 111 Schwebung | 113 Stehende Wellen | 114 Akustische Wellen | 118 Dopplereffekt | 121 Ultraschall und Sonar | 124 Zusammenfassung | 126
5 5.1 5.2 5.3 5.3.1 5.3.2 5.3.3 5.4 5.4.1 5.4.2 5.4.3 5.4.4 5.4.5 5.4.6 5.4.7 5.4.8 5.5 5.5.1 5.5.2 5.5.3 5.5.4 5.6 5.6.1
Wärmelehre | 129 Übersicht | 129 Temperaturskalen | 129 Phasenübergänge | 130 Aggregatzustände | 130 Phasendiagramme | 131 Partialdruck | 133 Reale Körper & Flüssigkeiten | 134 Wärmeausdehnung | 134 Wärmekapazität | 135 Mischtemperatur | 136 Schmelzen und Verdampfen | 137 Schweredruck | 139 Auftrieb | 140 Oberflächenspannung | 141 Grenzflächen | 144 Strömende Flüssigkeiten | 145 Volumenstrom | 145 Bernoulli-Gleichung | 147 Viskosität | 149 Gesetz von Hagen-Poiseuille | 150 Gase | 152 Ideales Gas | 152
VII
VIII | Inhalt
5.6.2 5.6.3 5.6.4 5.6.5 5.6.6 5.6.7 5.6.8 5.7 5.7.1 5.7.2 5.7.3 5.7.4 5.8 5.9 5.10 5.10.1 5.10.2 5.10.3 5.11 6 6.1 6.2 6.2.1 6.2.2 6.2.3 6.2.4 6.3 6.3.1 6.3.2 6.3.3 6.3.4 6.3.5 6.3.6 6.3.7 6.3.8 6.3.9 6.4 6.4.1 6.4.2 6.4.3 6.4.4
Gasgesetze | 152 Ideale Gasgleichung | 154 Kinetische Gastheorie | 154 Innere Energie & Wärmekapazität | 156 Barometrische Höhenformel | 157 Maxwell-Boltzmann-Verteilung | 159 Reale Gase | 161 Erster Hauptsatz | 162 Adiabatische Prozesse | 163 Carnot-Prozess | 164 Entropie | 167 Zweiter Hauptsatz | 169 Diffusion | 169 Osmose | 171 Wärmetransport | 172 Wärmeleitung | 172 Konvektion | 174 Wärmestrahlung | 174 Zusammenfassung | 176 Elektrizitätslehre | 179 Übersicht | 179 Elektrostatik | 179 Geschichte | 179 Elektrisches Feld | 180 Coulomb’sches Gesetz | 183 Potenzial und Spannung | 185 Elektrischer Strom | 187 Gefahren | 187 Stromrichtung | 188 Stromstärke | 188 Elektrischer Widerstand | 189 Stromleistung | 193 Kirchhoff’sche Regeln | 194 Maschenregel | 195 Flüssigkeiten & Gase | 196 Thermoelektrizität | 202 Magnetfelder | 203 Magnetfeldlinien | 203 Amperesches Gesetz | 203 Magnetisierung | 205 Lorentzkraft | 207
Inhalt | IX
6.4.5 6.4.6 6.4.7 6.4.8 6.5 6.5.1 6.5.2 6.5.3 6.5.4 6.5.5 6.5.6 6.5.7 6.6 6.6.1 6.6.2 6.6.3 6.6.4 6.7 6.8 6.8.1 6.8.2 6.8.3 6.8.4 6.9 7 7.1 7.2 7.2.1 7.2.2 7.3 7.3.1 7.3.2 7.3.3 7.3.4 7.4 7.5 7.6 7.7 7.7.1 7.7.2 7.7.3
Massenspektrometer | 209 Hall-Effekt | 210 Induktion | 212 Lenz’sche Regel | 214 Elektrische Schaltkreise | 214 Spannungsquellen | 214 Messverfahren | 215 Kondensator | 217 Spule | 222 Halbleiterbauelemente | 226 Schaltungen | 230 Gemischte Schaltung | 232 Wechselstrom | 233 Erzeugung | 233 Effektivwerte | 235 Wechselstromwiderstände | 237 Transformator | 241 Schwingkreise | 243 Elektromagnetische Wellen | 245 Ausbreitungsgeschwindigkeit | 245 Erzeugung & Empfang | 246 Leistung & Energie | 247 Spektrum | 249 Zusammenfassung | 250 Optik | 255 Übersicht | 255 Das Auge | 255 Aufbau | 255 Helligkeit und Farben | 256 Brechung | 258 Huygenssches Prinzip | 258 Snellius’sches Brechungsgesetz | 259 Optische Weglänge | 261 Totalreflexion | 262 Polarisation | 263 Fresnelsche Formeln | 265 Dispersion | 270 Geometrische Optik | 272 Lochkamera | 272 Linsen | 273 Abbildungsgleichung | 277
X | Inhalt
7.7.4 7.7.5 7.7.6 7.8 7.8.1 7.8.2 7.8.3 7.8.4 7.8.5 7.8.6 7.8.7 7.9 7.10 8 8.1 8.2 8.3 8.3.1 8.3.2 8.3.3 8.3.4 8.4 8.4.1 8.4.2 8.4.3 8.4.4 8.5 8.5.1 8.5.2 8.6 8.6.1 8.6.2 8.6.3 8.6.4 8.6.5 8.6.6 8.6.7 8.7 8.7.1 8.7.2 8.8
Linsensysteme | 281 Spiegel | 283 Optische Instrumente | 284 Interferenz | 290 Beugung | 290 Kohärenz | 291 Doppelspalt | 292 Gitter | 293 Einzelspalt | 296 Auflösungsvermögen | 298 Dünne Schichten | 299 Extinktion | 302 Zusammenfassung | 304 Atom- & Kernphysik | 307 Übersicht | 307 Geschichte | 307 Quantenphysik | 308 Strahlungsgesetze | 308 Fotoelektrischer Effekt | 312 Welle-Teilchen-Dualismus | 314 Quantenzahlen | 316 Atomphysik | 318 Bohr’sches Atommodell | 318 Orbitalmodell | 320 Periodensystem der Elemente | 321 Funktionsweise des Lasers | 322 Kernphysik | 324 Kernmodelle | 324 Kernspin | 328 Radioaktive Strahlung | 331 Alphastrahlung | 331 Betastrahlung | 333 Gammastrahlung | 334 Zerfallsgesetz | 335 Wechselwirkungsprozesse | 337 Detektoren | 341 Radiokarbonmethode | 344 Röntgenstrahlung | 346 Erzeugung | 346 Anwendung | 348 Strahlenschutz | 351
Inhalt | XI
8.8.1 8.8.2 8.8.3 8.9
Einheiten | 351 Strahlenbelastung | 353 Biologische Halbwertszeit | 354 Zusammenfassung | 355
Lösungen | 357 Stichwortverzeichnis | 363
1 Einführung 1.1 Was ist Physik? Das Wort Physik leitet sich vom griechischen Wort Physis ab, das mit Natur oder rea ler Wirklichkeit übersetzt werden kann. Die Physik grenzt sich daher ganz klar von der unerfahrbaren Metaphysik ab. Sie ist somit im wahrsten Sinne des Wortes eine Naturwissenschaft und wird gelegentlich auch Wissenschaft der unbelebten Materie genannt, um eine Abgrenzung zur Biologie zu schaffen, die sich ausschließlich mit lebenden Organismen befasst. Der Übergang von der modernen Quanten- und Atom physik mit ihrer physikalischen Beschreibung von Atomen und Molekülbindungen hin zur Chemie ist allerdings eher fließend. Auch die Ingenieurwissenschaften bauen auf physikalischen Gesetzmäßigkeiten auf und verwenden diese für praktische Zwe cke. Ob die Mathematik hingegen eine Natur- oder eher eine Geisteswissenschaft ist, darüber gibt es auch heute noch viele Diskussionen. Aus Sicht der Physik kann sie als Hilfswissenschaft angesehen werden, derer man sich bedient, um physikalische Theorien zu formulieren oder Beobachtungen der Natur zu abstrahieren und Voraus sagen zu treffen. Sie spielt daher insbesondere in der Physik eine herausragende Rolle, wie beim Durcharbeiten des vorliegenden Buches deutlich werden wird. Ganz allgemein unterscheidet man zwischen theoretischer und experimentel ler Physik, wobei beide Fachrichtungen für den Erkenntnisgewinn wichtig sind und die Grenzen zwischen beiden Fachrichtungen manchmal verschwimmen. Während die theoretische Physik beobachtete Messungen in ein Theoriegebäude integriert und/oder bei Bedarf neue in Theorien eingebettete Hypothesen formuliert, ist es die Aufgabe der Experimentalphysik, die getroffenen Vorhersagen der jeweiligen Theorie zu bestätigen oder gegebenenfalls zu widerlegen. Wichtig ist hierbei zu erwähnen, dass eine wissenschaftliche Theorie niemals bewiesen werden kann, da hierzu die Durchführung unendlich vieler Experimente nötig wäre, um alle Spezialfälle abzu decken. So wird beispielsweise die Relativitätstheorie auch heute noch als Theorie bezeichnet, obwohl sie schon mehrfach durch Experimente bestätigt wurde und die moderne Physik ohne sie nicht auskommt. Es genügt allerdings manchmal ein ein ziges Experiment, um eine Theorie widerlegen zu können. Die Falsifizierbarkeit von Aussagen ist somit ein wichtiges Kriterium, das eine wissenschaftliche und physikali sche Theorie erfüllen muss, um als solche anerkannt zu werden. Der Umkehrschluss, dass jede falsifizierbare Aussage eine wissenschaftliche Theorie ist, gilt demgegen über verständlicherweise nicht. Während die Physik bis ins Mittelalter hinein als Teilgebiet der Philosophie ver standen wurde, änderte sich dies hauptsächlich durch die zugrunde liegende Metho dik etwa ab dem 16. Jahrhundert. Der im Jahr 1641 geborene Galileo Galilei kann als Prototyp des heutigen Experimentalphysikers angesehen werden, da er als Erster in der Lage war, eine wirklich quantitative Beschreibung seiner Beobachtungen zu for https://doi.org/10.1515/9783110692921-001
2 | 1 Einführung
mulieren. Er nutzte damit die Mathematik gezielt als Werkzeug, um Gesetzmäßigkei ten aus Messreihen zu erstellen. So hat Galilei zum Beispiel die Fallgesetze, die die Basis der heutigen Kinematik bilden, mithilfe von Fallrinnen und Wasseruhren un tersucht und quantitativ formuliert. Isaac Newton hat etwa zur selben Zeit mit dem Formulieren seiner Fluxionsrechnung wichtige Beiträge zur Physik und Mathematik geliefert. Die Betrachtung von infinitesimal kleinen Zeitintervallen hat es nämlich er möglicht, Begriffe wie Geschwindigkeit und Beschleunigung streng mathematisch zu definieren und Berechnungen damit anzustellen, die auch komplizierte Bahnbewe gungen eines Körpers exakt beschreiben. Außerdem hat er aus den Aufzeichnungen von Johannes Kepler das nach ihm benannte Gravitationsgesetz formuliert, welches für die meisten Sterne und Planeten im Universum gültig ist. Newton kann daher als erster theoretischer Physiker angesehen werden. Da die Regeln der Mechanik für den Menschen mit relativ einfachen Hilfsmitteln zugänglich sind, hat die Physik daher hier ihren Anfang genommen. Es entwickelten sich dann später mit denselben Methoden weitere Themengebiete wie die Elektrody namik, die Thermodynamik (auch statistische Mechanik genannt) und die modernen Theorien der Quantenphysik und Relativitätstheorie. Die zurzeit entwickelten Theo rien sind sehr stark „mathematisiert“ und müssen ständig mit experimentellen Er gebnissen abgeglichen werden, um sicherzustellen, dass sie sich nicht zu weit von der Wirklichkeit entfernen. Ein Studium der Physik liefert allerdings nicht nur tiefe re Einblicke in die Natur der Dinge, sondern hat auch viele praktische Nutzen. Ohne die Verwendung von physikalischen Größen wäre ein modernes Leben wie in unse rer heutigen Gesellschaft nicht möglich. Es ist spannend zu beobachten, wie weit der menschliche Verstand in der Lage ist, die Natur um ihn herum zu verstehen und diese Beobachtungen in mathematische Formelsprache zu übertragen.
1.2 Physik & Medizin Physik und Medizin hängen eng miteinander zusammen, da die gesamte Anatomie des Körpers auf physikalischen Grundprinzipien beruht. So nimmt man als Mensch die Umgebung beispielsweise unmittelbar über den Tastsinn wahr, wenn man einen Gegenstand berührt. Wir können die Umgebung natürlich auch indirekt über unsere Sinnesorgane wie das Ohr wahrnehmen, das bereits kleinste Luftdruckschwankun gen in hörbare Geräusche umwandelt. Umgekehrt können wir mit unseren Stimmlip pen Töne erzeugen, sodass eine Kommunikation zwischen Menschen über Sprache möglich ist. Unser Auge hingegen fungiert gewissermaßen als Antenne für elektro magnetische Strahlung in einem engen Wellenlängenbereich und kann diese sogar durch die Wahrnehmung von Farben voneinander unterscheiden. Das Innere des menschlichen Auges funktioniert dabei völlig analog zu einer modernen Kamera mit Blende (Pupille), Objektiv (Linse) und Sensor (Netzhaut). Daher ist die Optik als Teil
1.3 Physikalische Größen
| 3
gebiet der Physik ein wichtiger Bestandteil der Ausbildung in der Augenheilkunde. Das Zusammenspiel von Knochen, Muskeln und Sehnen wiederum lässt sich mithil fe der klassischen Mechanik und Begriffen wie Kraft und Drehmoment vollständig beschreiben. Bei der Atmung spielen die physikalischen Gasgesetze und Diffusion von Kohlendioxid eine wichtige Rolle. Außerdem kann der Sauerstoffgehalt im Blut auf relativ einfache Weise mithilfe von unterschiedlichen Absorptionsverhalten über wacht werden. Die Nervenbahnen leiten Signale als elektrische Ströme im Körper weiter. Des halb ist das Verständnis der zugrunde liegenden Mechanismen bei der Ausbildung zu einem Mediziner sehr wichtig. Hinzu kommen in der modernen Medizin die Ent wicklung und Anwendung von computergestützten Verfahren zur Diagnose und Be handlung von Patienten. Wichtig zu nennen sind hier bildgebende Verfahren, wie beispielsweise die Computertomografie oder die Kernspinresonanz, die sich die Ei genschaften des Kernspins von Atomkernen zunutze macht, um Gewebeteile des menschlichen Körpers abzubilden und zu analysieren. Der Laser ist ebenfalls ein wichtiges Produkt der Grundlagenforschung aus dem Bereich der Atom- und Quan tenphysik. Ohne dessen Erfindung wären Operationen am menschlichen Auge, wie beispielsweise die Behandlung von Netzhautverkrümmungen, nicht möglich. Man erkennt bereits an diesen wenigen Beispielen, dass gewisse Grundkenntnisse der Physik auch in einem Medizinstudium essenziell sind. Im Laufe der folgenden in diesem Buch enthaltenen Kapitel werden die wichtigsten Kenntnisse einzeln und auf einander aufbauend anhand vieler aufschlussreicher Beispiele und Rechenaufgaben besprochen.
1.3 Physikalische Größen 1.3.1 Physikalische Einheiten Eine physikalische Größe wird mit speziellen Symbolen dargestellt, die umgangs sprachlich Formelbuchstaben genannt werden. Beispiele hierfür sind die Strecke, die ein Körper zurückgelegt, welche häufig mit s gekennzeichnet wird, oder die elektri sche Ladung, für die in der Regel ein großes Q verwendet wird. Diese physikalischen Größen können ebenfalls miteinander verknüpft werden. So ergibt zum Beispiel das Produkt zweier Strecken eine Fläche, die wiederum multipliziert mit einer weiteren Strecke ein Volumen ergibt. Ein weiteres Beispiel für eine solche Kombination von Größen ist das Verhältnis der Masse eines Körpers und dessen Volumen, woraus sich seine Dichte ergibt. Derartige Zusammenhänge zwischen physikalischen Größen nennt man Größengleichungen. Wird eine solche Größengleichung in einer Art darge stellt, die sich beim Leser leicht einprägen kann, so wird sie umgangssprachlich als Formel bezeichnet.
4 | 1 Einführung
Eine beliebige physikalische Größe G besitzt immer einen Zahlenwert, der auch Maßzahl genannt wird, und in den meisten Fällen eine Einheit. Symbolisch lässt sich eine Größe daher als Produkt von Zahlenwert und Einheit darstellen: G = {G} ⋅ [G]
(1.1)
Die geschweifte Klammer zieht damit in gewisser Weise die Maßzahl aus der Größe heraus, während die eckigen Klammern zur Benennung der zugehörigen Einheit ver wendet werden. Es ist allgemein üblich, die physikalische Größe in einer Gleichung beispielsweise durch eine kursive Schreibweise vom übrigen Text abzuheben. Im vor liegenden Buch wird diese Konvention durchgehend eingehalten, um keine Missver ständnisse beim Lesen entstehen zu lassen.
1.3.2 Internationales Einheitensystem Physikalische Größen werden verwendet, um Zustände und Zustandsänderungen zu beschreiben. Das in Europa und speziell in Deutschland verwendete Einheitensystem für diese Größen ist das Système International (SI). Dieses umfasst eine kleine Menge an Basisgrößen, aus denen alle anderen Größen, die wir später kennenlernen wer den, abgeleitet sind. Man nennt die enthaltenden Basiseinheiten daher auch SI-Ein heiten. Alle Basisgrößen mit den zugehörigen Einheiten sind in Tabelle 1.1 aufgelistet. Die entsprechenden Werte dieser Basisgrößen müssen mithilfe spezieller Definitionen festgelegt werden, wie im Folgenden erläutert wird. Im Falle der Länge war dies bis 1960 mithilfe des Urmeters geschehen, von wel chem mehrere Kopien in verschiedenen Ländern existieren. Die Länge des Urmeters wurde dabei als zehnmillionster Teil eines Viertels des Erdumfangs festgelegt. Dies lässt sich anschaulich zeigen, indem man den mittleren Erdradius mit 2π multipli ziert. In diesem Fall ergibt sich recht genau ein Wert von 40.000 km. Obwohl das Urmeter aus reinen Edelmetallen hergestellt wurde, ist es allerdings dennoch nicht vollkommen stabil. So kann sich die Länge beispielsweise durch Ausgasung, Tempe raturänderung oder Beschädigungen verändern. Da im Laufe der Zeit physikalische Messgeräte immer genauer wurden, hat man sich entschieden, ab dem Jahr 1983 die Tab. 1.1: Alle Größen und Einheiten des internationalen Einheitensystems SI. Basisgröße
Basiseinheit
Einheitensymbol
Länge Zeit Masse Stromstärke Temperatur Lichtstärke
Meter Sekunde Kilogramm Ampere Kelvin Candela
m s kg A K cd
1.3 Physikalische Größen
|
5
im gesamten Universum konstante Lichtgeschwindigkeit im Vakuum als Bezugsgröße zu verwenden. Die Definition wurde dabei so gewählt, dass sie in guter Übereinstim mung mit dem ursprünglichen Wert liegt. Die Lichtgeschwindigkeit besitzt daher ab diesem Zeitpunkt einen exakten Wert von 299.792.458 m/s. Zur Definition der Basisgröße Sekunde hat man früher die Sekunde als sechzigs ten Teil des sechzigsten Teils des vierundzwanzigsten Teils eines Tages festgelegt. Auch diese Basisgröße hat im Laufe der Zeit ihren Wert verändert, weil nämlich die Erdrotation ebenfalls nicht vollkommen stabil ist und von vielen Einflüssen verän dert werden kann. Um unabhängig von physikalischen Körpern zu werden, wird im Falle der Sekunde seit 1967 das 9.192.631.770-Fache der Periodendauer der radioakti ven Strahlung eines bestimmten Übergangs in Cäsium verwendet, was recht gut der früheren Definition der Sekunde entspricht. Die genauesten von Menschen gebauten Uhren sind daher die Atomuhren, weil sie exakt diese Periodendauer messen. Im Falle der Masse wurde bis 2019 das Urkilogramm zur Definition ihrer Einheit verwendet. Da auch das Urkilogramm Umwelteinflüssen ausgesetzt ist und seit der Herstellung kontinuierlich an Masse verliert, definiert man seit 2019 das Kilogramm über eine weitere Naturkonstante: dem sogenannten Planck’schen Wirkungsquan tum. Damit hat nun auch das Kilogramm zu jedem Zeitpunkt an allen Orten im Univer sum exakt denselben Wert. Die Definitionen der anderen Größen werden bei Bedarf im weiteren Verlauf dieses Buches genauer betrachtet. Neben den Basisgrößen gibt es noch eine Vielzahl an Größen, welche aus diesen abgeleitet wurden. Die Einheit Geschwindigkeit besteht beispielsweise aus den SI-Ein heiten Meter und Sekunde und kann als m/s geschrieben. Die Einheit der Kraft hat wie viele andere Größen sogar einen Eigennamen bekommen, nämlich Newton (N). So setzt sich die Einheit 1 N aus den SI-Einheiten Meter, Kilogramm und Sekunde zu sammen, wie im weiteren Verlauf des Buches dargestellt wird. Weitere Eigennamen sind Joule (J) für die Energie oder Coulomb (C) für die elektrische Ladung, die als Pro dukt der SI-Einheiten Ampere und Sekunde geschrieben werden kann. Außerdem gibt es neben dem SI noch weitere Einheitensysteme, die in manchen Büchern verwendet werden. Im angloamerikanischen Maßsystem wird zum Beispiel das Zoll (engl. inch) für die Strecke oder Knoten (engl. knot) als Einheit für die Ge schwindigkeit verwendet. Für die Kraft existiert dort die Einheit Pfund (engl. poundforce) anstelle von Newton, wohingegen die Energie in Kalorien (engl. calorie) ange geben wird. Ein weiteres System, das häufig in der physikalischen Fachliteratur ver wendet wird, ist das sogenannte cgs-Einheitensystem, das für die englischen Begriffe „centimetre gram second“ steht. Dieses System wird häufig eingesetzt, um Formulie rungen in der Elektrizitätslehre einfacher durchführen zu können, und ist daher rein akademischer Natur. Aus diesem Grund soll darauf an dieser Stelle nicht weiter ein gegangen werden.
6 | 1 Einführung
1.3.3 Stoffmenge & Atommasse Sowohl in der Physik als auch in der Chemie spielt die Stoffmenge mit der Einheit Mol (mol) eine wichtige Rolle. Für die Stoffmenge wird häufig das Symbol n verwendet. Die Einheit 1 mol ist definiert als die Menge eines Stoffes, der aus so vielen Teilchen besteht wie 12 g reiner Kohlenstoff 12 C. Somit hat 1 mol 12 C eine Masse von exakt 12 g. Dividiert man diese durch die Masse 1,9925 ⋅ 10−23 g eines Kohlenstoffatoms, dann erhält man als Ergebnis die sogenannte Avogadro-Konstante: N A = 6,02214076 ⋅ 1023
1 mol
(1.2)
Je nach Literatur wird diese häufig auch als Loschmidt-Konstante bezeichnet. Die mo lare Masse (auch Molmasse genannt) gibt an, wie viel Gramm ein Mol eines bestimm ten Teilchens wiegt. Sie ergibt sich damit durch Multiplikation der Avogadro-Konstan ten mit der Masse des betrachteten Teilchens: M = NA m
(1.3)
Die Einheit der Molmasse ist daher g/mol. Weiterhin ergibt sich aus dieser Betrach tung, dass die Anzahl der Teilchen in einem Mol gleich dem Produkt aus AvogadroKonstante und Stoffmenge ist: N = NA n
(1.4)
Neben der Stoffmenge spielt noch die atomare Masseneinheit speziell im Bereich der Atom- und Kernphysik eine wichtige Rolle. Diese ist allgemein definiert als der zwölfte Teil der Masse eines 12 C-Atoms. Die kaum zur Masse beitragenden Elektronen in der Atomhülle werden dabei vollständig vernachlässigt. Damit ergibt sich u = 1,660 ⋅ 10−27 kg
(1.5)
Da ein 12 C-Atom aus 12 Nukleonen, d. h. Protonen und Neutronen, besteht, die unge fähr identische Massen besitzen, ist die atomare Masseneinheit somit gleich der Masse eines Nukleons. Aufgrund dieser Definition entspricht 1 u exakt der molaren Masse ei nes Stoffes, sodass darüber eine direkte Beziehung zwischen Masse und Stoffmenge angegeben werden kann: m = Mn
(1.6)
Die molare Masse wird im Periodensystem der Elemente zusätzlich zur Ordnungszahl eines Elements mit angegeben. Da ein Element aber fast immer in verschiedenen Iso topen vorkommt, also mit identischer Protonenzahl, aber unterschiedlicher Neutro nenzahl, ist die Massenkonstante im Periodensystem immer ein Durchschnittswert, der jeweils mit der Häufigkeit der in der Natur vorkommenden Isotope dieses Stoffes
1.4 Fehlerrechnung |
7
gewichtet wird. Kennt man die Anzahl der Protonen und Neutronen eines Stoffes, so lässt sich damit auf relativ einfache Weise die molare Masse des jeweiligen Stoffes be rechnen, da Atommasse und molare Masse identisch sind.
1.4 Fehlerrechnung 1.4.1 Fehlerarten Physik ist zwar eine exakte Wissenschaft. Das bedeutet allerdings nicht, dass gewon nene Messergebnisse beliebig genau sind. Stattdessen besitzt jede Messgröße einen Fehler, der auf einer endlichen Genauigkeit der zur Verfügung stehenden Messinstru mente beruht. Die Kunst besteht darin, den zu erwartenden Fehler korrekt abzuschät zen, um Messergebnisse verschiedener Experimente miteinander vergleichen zu kön nen und sich über die maximal erreichbare Unsicherheit in einem Experiment im Kla ren zu sein. Wenn man beispielsweise einen Raum mit einem Gliedermaßstab vermisst und dabei außerdem mehrmals ansetzen muss, um die gesamte Länge des Raumes erfassen zu können, dann ist sofort klar, dass das Endergebnis nicht auf ein Zehntel eines Millimeters genau sein kann. Stattdessen bewegt sich die Ungenauigkeit in die sem Beispiel vermutlich im Bereich einiger Millimeter. Generell unterscheidet man zwischen systematischen Fehlern und statistischen Fehlern. Systematische Fehler sind deshalb besonders problematisch, weil sie meist aus unbekannten Gründen entstehen und das erhaltene Messergebnis systematisch in eine Richtung verschieben. Dies kann zum Beispiel aufgrund eines unzureichend ka librierten Messgerätes passieren. Systematische Fehler lassen sich deshalb auch nicht durch mehrmalige Messungen verkleinern. Im Gegensatz dazu entstehen statistische Fehler aufgrund von Schwankungen im Messprozess, wie beispielsweise beim Ablesen eines Maßstabs für eine Längenmes sung oder einer Uhr bei Zeitmessungen. Wenn die Messung allerdings oft genug wie derholt wird und ein Mittelwert der Ergebnisse gebildet wird, dann nähert sich der gemessene Wert immer mehr dem wahren Wert der zu bestimmenden Größe an. Da die Betrachtung und Abschätzung von statistischen Fehlern sehr wichtig sind, wer den wir uns im Folgenden näher damit befassen.
1.4.2 Arithmetisches Mittel Die mathematischen Grundlagen in diesem Abschnitt werden im folgenden Kapitel ausführlich erläutert. Wie bereits erwähnt kann das Ergebnis einer Messung durch Bildung eines Mittelwertes mehrerer unabhängiger Messungen verbessert werden. Die gemessenen Werte x i schwanken dabei mit zufälligen Abständen um den Mittelwert x̄ herum, der bei einer beliebig genauen Messung exakt dem wahren Wert entsprechen
8 | 1 Einführung
würde. Der Mittelwert muss daher so gewählt werden, dass die Abstände zu allen Messwerten möglichst klein werden. Um eine Änderung des Vorzeichens zu vermei den, betrachtet man stattdessen allerdings das Quadrat des Abstandes zu jedem Mess wert. Damit dieses Quadrat ein Minimum annimmt, muss die Ableitung der Summe 0 ergeben, d. h., es muss gelten: d N ∑ (x i − x)̄ 2 = 0 dx̄ i=1
(1.7)
Unter Verwendung der Ketten- und Potenzregel für Ableitungen ergibt sich durch Um stellen nach x̄ der folgende wichtige Zusammenhang:
x̄ =
1 N ∑ xi N i=1
(1.8)
Wenn also das arithmetische Mittel einer Messreihe mit N Messungen bestimmt wer den soll, dann müssen alle Messwerte aufsummiert und anschließend durch die An zahl der Messungen geteilt werden. Neben weiteren Definitionen von speziellen Mit telwerten wie das geometrische oder das harmonische Mittel ist das arithmetische Mit tel eines der am häufigsten verwendeten.
1.4.3 Standardabweichung Den Fehler einer Messgröße quantitativ abzuschätzen bedeutet nichts anderes als ein Maß für die Streuung um den berechneten Mittelwert herum zu bestimmen. Die Sum me in Gleichung (1.7) erfüllt dazu bereits alle notwendigen Bedingungen. Um daraus den Fehler einer Messung zu bestimmen, muss diese Summe noch durch die Anzahl der Messungen dividiert werden. Außerdem muss die Wurzel aus dem sich ergeben den Ausdruck gezogen werden, da es sich um eine quadratische Summe handelt und man beim Rechnen mit Einheiten am Ende wieder die Einheit der Messgröße erhalten möchte. Damit ergibt sich schließlich für die sogenannte Standardabweichung, die mit dem griechischen Buchstaben σ geschrieben wird:
σx = √
1 N ∑ (x i − x)̄ 2 N − 1 i=1
(1.9)
Die Subtraktion von 1 im Nenner rührt daher, dass schon der Mittelwert aus den Mess ergebnissen bestimmt wurde. Für große N kann dieser sogenannte Freiheitsgrad von 1 für diese Schätzgröße hingegen vernachlässigt werden. Ein anderes Wort für die Stan dardabweichung ist auch Fehler der Einzelmessung.
1.4 Fehlerrechnung | 9
Die Standardabweichung ändert sich auch bei einer großen Anzahl an Messun gen nicht signifikant und streut lediglich um einen bestimmten Wert herum. Aller dings kann man die Genauigkeit des Fehlers verbessern, indem man von der sich er gebenden Standardabweichung den Mittelwert berechnet. Dazu wird der Term unter der Wurzel erneut durch N teilt:
∆x = √
N 1 ∑ (x i − x)̄ 2 N(N − 1) i=1
(1.10)
Dies kann mit der Definition σ x zu folgendem Zusammenhang umgeschrieben wer den: σx ∆x = (1.11) √N Der Mittelwert des Fehlers rückt damit umso näher an den wahren Wert heran, je mehr Messungen durchgeführt werden. Der sich daraus ergebende Wert wird Fehler des Mit telwertes oder absoluter Fehler genannt und muss immer zusammen mit dem Mess wert als mögliche positive und negative Abweichung angegeben werden: x = x̄ ± ∆x
(1.12)
Bei der Angabe des Messwertes ist es wichtig, dass nicht zu viele Stellen nach dem Komma aufgeschrieben werden. Die Genauigkeit des Messwertes darf nicht höher aus fallen, als es der Fehler zulässt. Wenn also die erste signifikante Stelle eines Fehlers beispielsweise in der dritten Nachkommastelle liegt, dann dürfen der Messwert und der Fehler nicht mit mehr als drei Nachkommastellen angegeben werden. Eine Aus nahme ergibt sich, wenn einer der Werte auf 1 oder 2 enden. In diesem Fall ist es zu lässig, noch eine weitere Stelle anzugeben, damit der Rundungsfehler nicht zu groß wird. Neben dem absoluten Fehler ∆x wird häufig noch der relative Fehler angegeben. Dieser ergibt sich durch Division von ∆x durch x̄ und gibt an, wie groß der Fehler in Bezug auf den Messwert selbst ist. Oft wird dieser noch mit 100 multipliziert, um eine Prozentangabe zu erhalten: δx =
∆x ⋅ 100 % x̄
(1.13)
1.4.4 Gaußverteilung Eine wichtige Frage ist nun, wie die Messwerte um den wahren Wert herum verteilt sind. Es ist offensichtlich, dass große Abweichungen weniger wahrscheinlich sind als kleine Abweichungen. Man erwartet daher eine enge Verteilung um den wahren Wert
10 | 1 Einführung
herum. Die Wahrscheinlichkeit für ein bestimmtes Messergebnis ist weiterhin das Pro dukt aller Möglichkeiten zwischen dem wahren Wert und dem Messwert selbst. Dies führt notwendigerweise zur Verwendung der Exponentialfunktion der quadratischen Abweichung zwischen beiden Werten. Um die Wahrscheinlichkeit für große Fehler ab flachen zu lassen, muss der Exponent, der dem Verhältnis der quadratischen Abwei chung und dem Quadrat der Standardabweichung entspricht, noch mit einem Minus zeichen versehen werden. Damit ergibt sich folgende als Gaußverteilung bezeichnete Funktion: p(x) =
1 (x − x)̄ 2 ) exp ( 2σ 2 σ √2π
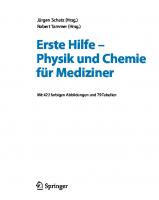
(1.14)
Der Vorfaktor 1/(σ √2π) ist lediglich eine Normierungskonstante, die sich dadurch er gibt, dass das Integral und damit die Fläche unter dieser Verteilung den Wert 1 anneh men müssen. Der Faktor 2 im Nenner muss aufgrund der Definition der Standardab weichung eingefügt werden. Durch das Integrieren der Gaußkurve (auch Glockenkurve genannt) in einem bestimmten Intervall kann also die Wahrscheinlichkeit dafür aus gerechnet werden, einen Messwert in diesem Bereich anzutreffen. Die grafische Darstellung einer solchen Gaußverteilung ist in Abbildung 1.1 für den Mittelwert x̄ = 2 und die Standardabweichung σ = 1 dargestellt. Integriert man die Gaußverteilung vom Mittelwert bis zur einfachen Standardabweichung, dann er hält man als Ergebnis den Wert 68,27 %, d. h., in einem Intervall von 1σ um den Mittel wert beziehungsweise den wahren Wert herum sind 68,27 % aller Messergebnisse zu finden. Erweitert man das Intervall auf 2σ, vergrößert sich die Wahrscheinlichkeit be reits auf 95,45 %, während es bei 3σ schon 99,73 % sind. In der Teilchenphysik spricht man von einer neuen Entdeckung, wenn der Mittelwert der Messergebnisse mindes 0.5 x¯
0.4
p(x )
0.3 0.2 σ 0.1 0 −2
0
2 x
4
6
Abb. 1.1: Grafische Darstellung der Gaußverteilung mit dem eingezeichneten Mittelwert und der einfachen Standardabweichung auf beiden Seiten der Kurve.
1.4 Fehlerrechnung |
11
tens 5σ vom gemessenen Untergrund abweicht. Dies entspricht einer Wahrscheinlich keit von 99,999942 %. Dieses Intervall spielte besonders bei der Entdeckung des HiggsTeilchens im Jahr 2012 eine wichtige Rolle.
1.4.5 Fehlerfortpflanzung Zunächst betrachten wir zwei Balken, deren Länge gemessen wurde. Bei der Messung hat sich außerdem ein bestimmter Fehler ergeben, der anhand der gegebenen Mess werte abgeschätzt wurde. Fügt man nun beide Balken so zusammen, dass sich deren Längen addieren, so ist der daraus resultierende Fehler der Gesamtlänge nicht gleich der Summe der Fehler der Einzellängen. Vielmehr können sich beide Fehler im Ex tremfall sogar gegenseitig aufheben. Die einfache Summe ∆z = ∆x + ∆y
(1.15)
zweier Fehler ∆x und ∆y kann daher als Maximalabschätzung angesehen werden. Im Folgenden soll nun eine bessere Möglichkeit hergeleitet werden, mit der man Fehler miteinander geschickt kombinieren kann. Für die Addition verschiedener fehlerbehafteter Größen x und y, die über eine analytische Funktion f(x, y) miteinander verknüpft sind, verwendet man die Tatsache, dass sich die Änderung ∆f einer Funktion für nicht allzu große ∆x relativ gut durch die erste Ableitung ∂f ∆x (1.16) ∆f = ∂x als Steigung der Tangente annähern lässt, wobei ∆x hier als Fehler interpretiert wird. Da f von zwei Variablen abhängt, müssen die beiden Änderungen mithilfe des Satzes von Pythagoras quadratisch addiert werden:
∆f = √(
2 2 ∂f ∂f ∆x) + ( ∆y) ∂x ∂y
(1.17)
Hängt die Funktion von mehr als zwei Variablen ab, so muss die quadratische Summe unter der Wurzel entsprechend erweitert werden. Aus der zu Beginn betrachteten Summe z = x+y ergibt sich damit durch Einsetzen in die Formel der Gauß’schen Fehlerfortpflanzung: ∆z = √(∆x)2 + (∆y)2
(1.18)
Für die Summe zweier physikalischer Größen müssen die Fehler also quadratisch ad diert werden. Bei der Multiplikation zweier Größen gemäß z=x⋅y
(1.19)
12 | 1 Einführung
ergibt sich durch Einsetzen in dieselbe Formel ∆z = √(y∆x)2 + (x∆y)2
(1.20)
Unter Verwendung von Gleichung (1.19) lässt sich dieses Ergebnis zu dem folgenden wichtigen Zusammenhang umformen: ∆z √ ∆x 2 ∆y 2 = ( ) +( ) z x y
(1.21)
Im Gegensatz zur Summe von zwei Größen müssen hier folglich die relativen Fehler quadratisch addiert werden. Für die Division zweier Größen ergibt sich, wie man leicht durch Einsetzen zeigen kann, eine identische Formel. Neben der Gauß’schen Fehler fortpflanzung gibt es noch die Fehlerfortpflanzung zur Abschätzung des maximalen Fehlers. In diesem Fall wird aus der quadratischen Summe die Summe der Beträge: ∂f ∂f ∆f = ∆x + ∆y ∂x ∂y
(1.22)
Der sich daraus ergebende Wert ist somit der größtmögliche erwartbare Fehler. Die Gleichungen für Addition und Multiplikation zweier Größen müssen dann entspre chend angepasst werden.
Aufgaben Aufg. 1.1: Natrium besitzt üblicherweise 11 Protonen und 12 Neutronen im Atomkern. Welche Masse besitzt dann 1 mol Natrium ungefähr? Aufg. 1.2: Beim Messen der Periodendauer eines Pendels mithilfe einer Lichtschran ke werden folgende Zeiten gemessen: 1,433 s, 1,428 s, 1,432 s, 1,432 s, 1,431 s. Welcher Mittelwert ergibt sich daraus? Aufg. 1.3: Die Körperlänge eines Erwachsenen wurde sechsmal nacheinander be stimmt und dabei wurden folgende Messwerte notiert: 173,2 cm, 173,1 cm, 173,5 cm, 173,2 cm, 173,0 cm, 172,2 cm. Wie groß sind dann der sich daraus ergebende Messwert und Fehler? Aufg. 1.4: Beim Vermessen einer rechteckigen Platte wurde die Länge zu (147,54 ± 0,05) cm und die Breite zu (63,13 ± 0,05) cm bestimmt. Wie groß ist die Fläche der Platte inklusive des zu erwartenden Maximalfehlers?
2 Mathematische Methoden 2.1 Übersicht Mathematik gilt als Hilfswissenschaft der Physik. Ohne mathematische Grundlagen ist es unmöglich, physikalische Theorien vollständig zu durchschauen und quantita tive Schlüsse daraus zu ziehen. Dies liegt bereits darin begründet, dass diese Theorien aus komplexen mathematischen Konstrukten bestehen, aus denen Modelle abgeleitet werden, mit denen die Wirklichkeit beschrieben werden kann. Das Ziel dieses Kapi tels ist es, das notwendige mathematische Wissen zu vermitteln, um die in diesem Buch vorgestellten Themen verstehen und berechnen zu können. Im ersten Abschnitt wird zunächst auf die wichtigsten Aspekte der Algebra eingegangen, um viele bereits aus der Schule bekannte Aspekte zu wiederholen und eventuell vorhandene Lücken zu schließen. Dazu gehören die Rechnung mit Brüchen und Zehnerpotenzen sowie die Fähigkeit, lineare und quadratische Gleichungen zu lösen. Diese Grundlagen wer den im darauffolgenden Abschnitt verwendet, um den Begriff der Ableitung und des Integrals einzuführen. Beides sind wichtige Grundlagen der Analysis, die in diesem Buch häufig Anwendung findet. Abschließend wird das Rechnen mit Vektoren erläu tert und dabei insbesondere auf die Anwendung der linearen Algebra hingewiesen. In diesem Abschnitt werden außerdem die wichtigsten Begriffe der Vektorrechnung wie das Skalarprodukt oder das Vektorprodukt vorgestellt.
2.2 Algebra 2.2.1 Arithmetik Der Begriff Arithmetik umfasst das Rechnen mit Zahlen. Diese werden dabei üblicher weise in vier Kategorien eingeteilt, die in Tabelle 2.1 zusammengefasst sind. Die ersten Zahlen, mit denen die Menschen schon vor Tausenden von Jahren gerechnet haben, waren die natürlichen Zahlen. Sie haben ihren Namen dadurch erhalten, dass sie auf natürliche Weise beim Abzählen von Gegenständen oder Lebewesen entstehen. Diese Zahlen wurden dann später um die negativen Zahlen und die Zahl 0 erweitert. Nega tive Zahlen sind demzufolge natürliche Zahlen mit einem vorangestellten Minuszei Tab. 2.1: Alle in der Mathematik definierten Zahlenbereiche. Natürliche Zahlen Ganze Zahlen Rationale Zahlen Reelle Zahlen
1, 2, 3, 4, 5, ... − . . . , −3, −2, −1, 0, 1, 2, 3, . . . Brüche von ganzen Zahlen Rationale und irrationale Zahlen
https://doi.org/10.1515/9783110692921-002
14 | 2 Mathematische Methoden
chen. Man spricht in diesem Zusammenhang auch von einem negativen Vorzeichen. Die natürlichen und die negativen natürlichen Zahlen wurden später unter dem Be griff der ganzen Zahlen zusammengefasst. Negative Zahlen bilden bereits eine erste Stufe der Abstraktion, die dem menschlichen Verstand entsprungen ist, da eine nega tive Anzahl von Objekten in der Natur nicht vorkommt. Ein Guthaben auf einem Kon to, das kleiner als 0 ist, existiert zwar prinzipiell nicht, kann aber mithilfe der ganzen Zahlen dargestellt werden, wie der Blick auf so manchen Kontoauszug beweist. Schon bald reichten die von den ganzen Zahlen gebotenen Möglichkeiten aller dings nicht mehr aus. So wollten die Menschen im Laufe der Zeit ebenfalls Teile eines Ganzen mit Zahlenwerten darstellen. Dazu betrachten wir das typische Beispiel ei nes Kuchens, der in acht gleich große Kuchenstücke geschnitten wird. Entfernt man nun zwei dieser Stücke, so bleiben sechs von acht Stücken übrig. Dies entspricht dem Quotienten 6/8 beziehungsweise der Kommazahl 0,75. Mathematisch gesehen han delt es sich hierbei um einen Bruch, der den rationalen Zahlen zugeordnet wird. Somit sind die natürlichen Zahlen eine Teilmenge der ganzen Zahlen und diese wiederum eine Teilmenge der rationalen Zahlen. Kommazahlen werden genau dann als ratio nale Zahlen bezeichnet, wenn sie durch eine endliche Anzahl an Nachkommastellen dargestellt werden können. In diesem Fall können sie immer als Bruch dargestellt wer den. Neben den rationalen Zahlen, von denen es bereits unendlich viele gibt, existie ren allerdings ebenfalls unendlich viele Zahlen mit unendlich vielen Nachkomma stellen. Diese sogenannten irrationalen Zahlen werden zusammen mit den rationalen Zahlen in der Menge der reellen Zahlen zusammengefasst. Ein berühmtes Beispiel für Zahlen mit einer unendlich großen Zahl an Nachkommastellen ist die Kreiszahl π, die meistens recht gut mit zwei Nachkommastellen als 3,14 angenähert wird. Im Folgenden soll kurz zusammengefasst werden, wie man mit reellen Zahlen rechnen kann. Man kann zwei reelle Zahlen a und b beispielsweise miteinander ad dieren, was durch ein Pluszeichen (+) zwischen ihnen verdeutlicht wird. Die dabei durchgeführte Operation wird als Addition bezeichnet. Das Ergebnis der Addition wird als Summe bezeichnet. Die Buchstaben a und b stehen bei symbolischen Berechnun gen als Platzhalter für zwei verschiedene Zahlen. Die Addition ist kommutativ, was bedeutet, dass sich a und b vertauschen lassen, ohne dabei den Zahlenwert der Sum me zu verändern: a+b=b+a
(2.1)
Diese Möglichkeit der Umformung wird daher auch als Kommutativgesetz bezeichnet. Bei der Addition von drei verschiedenen Zahlen spielt die Reihenfolge der Addition ebenfalls keine Rolle, was durch das sogenannte Assoziativgesetz ausgedrückt wird: (a + b) + c = a + (b + c)
(2.2)
2.2 Algebra
| 15
Die Verwendung von Klammern gibt immer an, dass die darin enthaltende Operation zuerst vorrangig ausgeführt werden muss. Eine weitere Möglichkeit besteht in der Subtraktion zweier reelle Zahlen, die durch ein Minuszeichen (−) dargestellt wird. Eine Subtraktion ist allerdings keine eigenstän dige Operation, sondern kann auf die Addition zurückgeführt werden. In diesem Fall wird eine Zahl mit einer negativen Zahl addiert, d. h., man kann schreiben: a − b = a + (−b)
(2.3)
Das Kommutativgesetz gilt daher unter Verwendung dieser Schreibweise ebenfalls für die Subtraktion. Für die n-malige Addition einer Zahl a mit sich hat folgende Kurzschreibweise eingebürgert: (2.4) n ⋅ a = ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ a + a + a + ⋅⋅⋅ + a n-mal
Diese wird als Multiplikation bezeichnet und durch einen Malpunkt (⋅) symbolisiert. Für die Multiplikation gelten genauso wie für die Addition das Kommutativ- und das Assoziativgesetz. Weiterhin kommt hierbei noch das Distributivgesetz ins Spiel, das verwendet wird, um einer Addition Zahlen auszuklammern beziehungsweise Zahlen mit einer Summe zu multiplizieren. a ⋅ (b + c) = ab + ac
(2.5)
Bei der symbolischen Multiplikation, d. h. bei der Verwendung von Buchstaben statt Zahlen, wird der Malpunkt in der Regel weggelassen, wie der letzte Schritt deut lich macht. Weiterhin ist zu berücksichtigen, dass bei gleichrangigen Operatoren ein Term immer von links nach rechts ausgewertet werden muss. Aus den aufgezeigten Beziehungen lassen sich die beiden Regeln Punkt-vor-Strich-Rechnung und Klam mern-vor-Punkt-Rechnung ableiten. Erstere besagt, dass in einer Rechnung zuerst alle Multiplikationen durchgeführt werden müssen und danach erst die noch ent haltenen Additionen beziehungsweise Subtraktionen. Die zweite Regel gibt an, dass zuerst alle Berechnungen durchgeführt werden müssen, die mit Klammern umfasst sind. Erst danach dürfen die übrigen Zahlen damit verrechnet werden. Ähnlich wie Addition und Subtraktion gibt es eine Erweiterung der Multiplika tion, bei der eine Zahl a mit dem Kehrwert 1/b einer Zahl b multipliziert wird. Dies entspricht mathematisch einer Division von a durch b. Für die Division zweier Zahlen gelten dementsprechend die gleichen Regeln wie für die Multiplikation. Alle vorge stellten Rechenarten werden von handelsüblichen Taschenrechnern beherrscht und können damit einfach und schnell ausgerechnet werden. Fehlermeldungen der Ge räte weisen dabei auf fehlerhafte Eingaben hin, die zum Beispiel durch ein falsches Setzen von Klammern oder die Verwendung unerlaubter Ausdrücke wie das Logarith mieren einer negativen Zahl hervorgerufen werden können. Es ist daher beim Verwen den eines Taschenrechners ratsam, bei der Eingabe in einen Taschenrechner auf lan ge Terme zu verzichten und stattdessen mit Zwischenergebnissen weiterzurechnen.
16 | 2 Mathematische Methoden
Gerade bei Leihgeräten ist es wichtig, die Einstellungen des Taschenrechners vor der Benutzung zu überprüfen, um Fehler durch falsche Voreinstellungen zu vermeiden. Die größten Fehlerquellen werden im weiteren Verlauf dieses Kapitels hervorgehoben.
2.2.2 Bruchrechnung Ein Bruch besteht immer aus drei Teilen: dem Zähler a, dem Nenner b und dem zwi schen beiden Zahlen gezeichneten Bruchstrich: Bruch =
a Zähler = Nenner b
(2.6)
Ausgesprochen wird dieser Bruch als a-b-tel oder a geteilt durch b. Der Bruchstrich ist demzufolge gleichzusetzen mit der Division des Zählers durch den Nenner. Man kann Brüche durch Multiplikation oder Division des Zählers beziehungsweise des Nenners mit einer Zahl modifizieren. Es müssen daher sowohl Zähler als auch Nenner mit der gleichen Zahl multipliziert werden: a a⋅c = b b⋅c
(2.7)
Man sagt in diesem Fall, dass der Bruch mit der Zahl c erweitert wird. Dividiert man hingegen sowohl Zähler als auch Nenner mit der gleichen Zahl c, dann spricht man vom Kürzen eines Bruches: a a/c = (2.8) b b/c In der Regel werden Brüche solange gekürzt, bis kein gemeinsamer Teiler von Zähler und Nenner mehr vorhanden ist. Um das Kürzen und Erweitern von Brüchen besser nachvollziehen zu können, betrachten wir eine in 16 gleich große Teile zerschnittene Pizza. Eine hungrige Person nimmt sich 2 Stücke dieser Pizza weg und legt sie auf ih ren Teller. Somit bleiben 14 von 16 Stücken auf dem Blech liegen, was wiederum dem Bruch 14/16 entspricht. Sowohl der Zähler als auch der Nenner sind durch die Zahl 2 teilbar. Kürzt man diesen Bruch daher mit 2, bleibt als Ergebnis der Bruch 7/8 übrig. Die Person hat folglich 1/8 der Pizzastücke entfernt. Eine weitere Person möchte ger ne 1/4 der gesamten Pizza bekommen. Um die Anzahl der Stücke auszurechnen, muss der Bruch so erweitert werden, dass der Nenner der Anzahl der Gesamtstückzahl ent spricht, d. h. in diesem Fall der Zahl 16. Daher muss der Bruch mit 4 erweitert werden und man erhält als Resultat 4/16. Die Person erhält demzufolge 4 Stücke der Pizza. Aus den bisher dargestellten Zusammenhängen ergibt sich folgende Regel für die Multiplikation zweier Brüche: a c a⋅c ⋅ = b d b⋅d
(2.9)
2.2 Algebra | 17
Zwei Brüche werden folglich miteinander multipliziert, indem beide Zähler miteinan der und beide Nenner miteinander multipliziert werden. Wird stattdessen ein Bruch durch einen anderen geteilt, so entspricht dies wiederum einer Multiplikation des ers ten Bruchs mit dem Kehrwert des zweiten Bruchs: a c a d : = ⋅ b d b c
(2.10)
Auf die gleiche Art werden Doppelbrüche gelöst. Hierbei handelt es sich um Brüche von Brüchen, d. h., jeder Bruch besitzt jeweils einen eigenen Zähler und Nenner: Doppelbruch =
Zähler 1 Nenner 1 Zähler 2 Nenner 2
=
a b c d
(2.11)
Ein Doppelbruch entsteht beispielsweise beim Kürzen von Brüchen wie in Gleichung (2.8) gezeigt. Wichtig ist hierbei die Identifikation des Hauptbruchstrichs, der sich zwi schen den beiden Brüchen befindet. Die Berechnung eines Doppelbruchs entspricht daher exakt der Division zweier Brüche. Somit wird der obere Bruch mit dem Kehrwert des unteren Bruchs multipliziert: a b c d
=
a d ⋅ b c
(2.12)
Brüche lassen sich ebenfalls in Dezimalzahlen umrechnen. Dazu muss der Bruch so erweitert werden, dass der Nenner entweder 10 oder ein Vielfaches davon ist. Im nächsten Schritt muss dann das Komma im Zähler um dieses Vielfache von links nach rechts geschoben werden. So lässt sich beispielsweise der Bruch 1/2 mit der Zahl 50 erweitern, sodass man 50/100 als Ergebnis erhält. Da 100 ein zweifaches Vielfaches von 10 ist, muss das Komma der Zahl 50 um 2 Stellen nach links verschoben werden. Als finales Ergebnis erhält man dann die Dezimalzahl 0,5. Ein weiteres Beispiel ist der Bruch 125/50. Man kann diesen entweder mit der Zahl 5 kürzen, sodass man den Bruch 25/10 und damit die Dezimalzahl 2,5 erhält, oder man erweitert ihn mit der Zahl 2 und erhält somit 250/100 als Ergebnis. Durch zweimaliges Verschieben des Kommas ergibt sich erneut 2,5 als Zahlenwert. Moderne Taschenrechner besitzen in der Regel eine Taste zum direkten Umrechnen von Brüchen in Dezimalzahlen oder umgekehrt. Es empfiehlt sich daher bei der Verwendung eines neuen Taschenrechners, sich zu nächst mit der Funktionsweise vertraut zu machen und einige Beispielaufgaben zu rechnen.
2.2.3 Potenzen & Logarithmus Das n-fache Produkt gleicher Zahlen kann mithilfe der Potenzschreibweise einfacher aufgeschrieben werden. Wenn die Zahl a fünfmal mit sich selbst multipliziert wird,
18 | 2 Mathematische Methoden dann lässt sich dieses Produkt zu a5 abkürzen. Allgemein lassen sich Potenzen also wie folgt definieren: a ⋅ a ⋅ a ⋅ ⋅⋅⋅ ⋅ a (2.13) a n = ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ n-mal
Dies lässt sich ebenfalls als an = b
(2.14)
schreiben. Hierbei wird a als Basis, n als Exponent und das Ergebnis b als Potenzwert bezeichnet. Daraus ergeben sich folgende Rechenregeln für die Multiplikation und Division für gleiche Basen: 1. Bei der Multiplikation von Potenzen mit gleichen Basen addieren sich die Expo nenten: a m ⋅ a n = a n+m 2.
Im Falle der Multiplikation unterschiedlicher Basen mit identischen Exponenten können die Basen vor der Potenzierung zunächst addiert werden: a n ⋅ b n = (a ⋅ b)n
3.
(2.15)
(2.16)
Potenziert man eine Potenz ein weiteres Mal, dann werden die Exponenten mul tipliziert: (a n )m = a n⋅m
(2.17)
Negative Potenzen sind ebenfalls definiert und geben den Kehrwert der Potenz an: a−n =
1 an
(2.18)
Eine besondere Basis ist die sogenannte Euler’sche Zahl e = 2,718 . . . . Hierbei han delt es sich ähnlich wie bei der Kreiszahl π um eine reelle Zahl mit unendlich vie len Nachkommastellen. Warum diese Zahl als Basis bei Potenzen eine wichtige Rolle spielt, wird später im Abschnitt zur Analysis deutlich werden. In einer beliebigen Po tenz (2.19) xn = a kann die Unbekannte x berechnet werden, indem man auf beiden Seiten die Wurzel zieht. In diesem Fall schreibt man 1
n x=√ a = an
(2.20)
Die rechte Seite verdeutlicht noch einmal die Tatsache, dass die Wurzel als Umkeh rung des Potenzierens angesehen werden kann.
2.2 Algebra
| 19
Wenn die Basis und der Potenzwert bekannt sind, dann kann der Exponent be rechnet werden, indem man Gleichung (2.14) nach n umstellt. Dazu muss der Loga rithmus von b zur Basis a berechnet werden. Dies wird wie folgt geschrieben: n = log a b
(2.21)
Dementsprechend können die Rechenregeln der Potenzrechnung auf die Rechnung mit Logarithmen übertragen werden. Diese lauten: 1. Das Logarithmieren eines Produkts zweier Zahlen ist gleich der Summe der Loga rithmen jeder einzelnen Zahl: log a (b ⋅ c) = log a b + log a c 2.
(2.22)
Wenn man den Logarithmus einer Potenz bildet, dann kann der Exponent vor den Logarithmus gezogen werden: log a (b r ) = r log a b
(2.23)
Möchte man den Logarithmus einer Zahl zu einer beliebigen Basis a berechnen, ist dies auf direktem Weg in der Regel nicht möglich. Ein Taschenrechner besitzt übli cherweise eine Taste zur Berechnung des Logarithmus zur Basis 10 (dekadischer Lo garithmus), welche mit log oder lg gekennzeichnet ist, und weiterhin eine Taste für den Logarithmus zur Basis e. Dieser Logarithmus wird mit ln bezeichnet, was für Lo garithmus Naturalis steht. Dies lässt sich mit dem Begriff natürlicher Logarithmus über setzen. Für diesen gilt dann entsprechend die Beziehung: e n = b ⇒ n = log e b = ln b
(2.24)
Um eine dieser beiden Tasten verwenden zu können, muss der zu berechnende Loga rithmus zunächst in die Basis 10 beziehungsweise e umgerechnet werden. Um eine allgemeine Formel für die Umrechnung von Basen aufstellen zu können, logarithmie ren wir beide Seiten von Gleichung (2.14) unter Verwendung einer beliebigen Basis c: log c (a n ) = log c b
(2.25)
Nun kann der Exponent n vor den Logarithmus gezogen und die sich ergebende Glei chung nach n umgestellt werden: n=
log c a log c b
(2.26)
Setzt man c beispielsweise gleich 10, so kann der Exponent unter Verwendung der be kannten Größen a und b unmittelbar mit dem Taschenrechner unter Verwendung des
20 | 2 Mathematische Methoden
dekadischen Logarithmus berechnet werden. Alternativ kann c gleich der Euler’schen Zahl e gesetzt werden, sodass eine Berechnung mit dem natürlichen Logarithmus ln durchgeführt werden kann. Man kann sich mithilfe eines Taschenrechners oder Com puterprogramms leicht davon überzeugen, dass die Berechnung im Fall zweier belie biger Zahlen a und b für beide Basen identische Ergebnisse liefert. Logarithmen (insbesondere zur Basis 10) spielen beispielsweise bei der Klassifi kation von Desinfektionsmitteln eine wichtige Rolle, da hierbei die Größenordnung des Desinfektionsgrades entscheidend ist. In diesem Zusammenhang wird daher von sogenannten Log-Stufen gesprochen. Jede Log-Stufe steht für eine Reduktion der Keim zahl von einer Zehnerpotenz. Einfaches Händewaschen unter Zuhilfenahme von Sei fe entspricht einer Reduktion von etwa 2 Log-Stufen, d. h., die Keimzahl wird um bis zu 99 % reduziert. Eine Desinfektion der Haut beginnt in der Regel bei einer Log-Stu fe von 3 oder höher, wobei es hierbei keine einheitliche Definition gibt. Es müssen von dem verwendeten Desinfektionsmittel daher mindestens 99,9 % der Keime auf der Haut beseitigt werden können, um einen ausreichenden Schutz zu erzielen. Bei Instrumenten liegt die Log-Stufe mit 4 nochmal um eine Größenordnung höher. Von einer sogenannten Sterilisation spricht man, wenn bereits bei einem halben Sterilisa tionszyklus mindestens 6 Log-Stufen bei resistenten Sporen erreicht werden.
2.2.4 Zehnerpotenzen In der Physik kommen sehr häufig Zahlen vor, die unter Verwendung alltäglicher Maß stäbe wie Kilogramm oder Meter sehr klein oder groß erscheinen. Um die Anzahl von Nullen, die dadurch relativ groß wird, auf ein Minimum zu beschränken, verwendet man häufig Zehnerpotenzen. So kann beispielsweise die Zahl 1.000 durch die Zehner potenz 103 ausgedrückt. Entsprechend kann die zufällig gewählte Zahl 56.324.643 mit hilfe von Zehnerpotenzen als 5.63 ⋅ 107 geschrieben, wobei auf zwei Stellen nach dem Komma gerundet wurde, um die Zahl zu verkürzen. In der Praxis hat sich gezeigt, dass es sinnvoll ist, Exponenten zu wählen, die durch 3 teilbar sind. Dies entspricht jeweils einer Vergrößerung um den Faktor 1.000. Diese Zehnerpotenzen wurden mit griechi schen Namen versehen, die als Vorsilben vor die jeweilige Einheit geschrieben wer den. Beispiele hierfür sind Kilo (k), Mega (M) und Giga (G). Die Vorsilbe Kilo wird mit k abgekürzt und bedeutet 103 , d. h., 1 Kilometer (km) entspricht 1.000 Metern (m). Ent sprechend hat Mega einen Zahlenwert von 106 und Giga 109 . Allerdings findet man nicht immer alle Vorsilben bei den alltäglichen Größen wieder. Das Wort Megameter zum Beispiel wird im alltäglichen Sprachgebrauch nicht verwendet. Stattdessen wer den größere Entfernungen immer als Vielfaches von Kilometern angegeben. Auch bei Massen trifft man die Vorsilbe Mega nicht an. Die nächstgrößere Einheit nach dem Ki logramm wird üblicherweise als Tonne (t) bezeichnet. Größere Massen werden dann als ein Vielfaches der Tonne ausgedrückt.
2.2 Algebra
| 21
Die Methode der Zehnerpotenzen und Vorsilben lässt sich für Zahlen kleiner als 1 fortsetzen. So entspricht die Zahl 0,001 dem Bruch 1/1.000. Die entsprechende Zehner potenz lautet dementsprechend 10−3 . Für die nachfolgende Einheit wurde als Vorsilbe Milli eingeführt, die im Gegensatz zu Mega mit einem kleinen m abgekürzt wird. Die nächstkleineren Einheiten sind Mikro (griechischer Buchstabe μ) für 10−6 und Na no (n) für 10−9 . Diese Vorsilben können prinzipiell für alle gängigen Maßeinheiten verwendet werden. Beispielsweise entspricht 1 mg einem tausendstel Gramm und 1 nm einem milliardstel Meter. Auch für diese Zahlen kann eine einfachere und über sichtlichere Schreibweise durch Zehnerpotenzen erzielt werden. Die Zahl 0,000278592 lässt sich damit durch Runden auf zwei Nachkommastellen als 0,28 ⋅ 10−3 schreiben. Alle wichtigen Vorsilben mit den jeweiligen Abkürzungen und Bedeutungen sind in Tabelle 2.2 zusammengefasst. Das Umrechnen von Zehnerpotenzen geschieht durch eine Verschiebung des Kommas. Das Komma wird nach rechts verschoben, wenn die Zehnerpotenz verkleinert, und nach links, wenn sie vergrößert wird. Bei Umrech nungen von Flächen beziehungsweise Volumen ist allerdings zu beachten, dass die nächstgrößere Einheit nicht mehr drei Zehnerpotenzen, sondern 6 beziehungsweise 9 Zehnerpotenzen größer ist. Dies liegt darin begründet, dass das Produkt von Meter und Meter genau einem Quadratmeter (m2 ) entspricht. Die Einheit Quadratkilometer ist dementsprechend nicht um den Faktor 103 , sondern um (103 )2 = 106 größer. Im Falle von Kubikmetern beträgt der Umrechnungsfaktor sogar (103 )3 = 109 . Bei Volumenangaben von Flüssigkeiten wird häufig noch die Einheit Liter (l) verwendet, wobei 1 l als 1 dm3 definiert ist. Zwischen 1 m3 und 1 l Wasser liegt damit der Faktor 1.000. Tab. 2.2: Die wichtigsten Zehnerpotenzen inklusive ihrer Bedeutung und Abkürzung zum Nachschla gen. 0,000 000 000 000 001 0,000 000 000 001 0,000 000 001 0,000 001 0,001 1 1 000 1 000 000 1 000 000 000 1 000 000 000 000
10−15 10−12 10−9 10−6 10−3 100 103 106 109 1012
Billiardstel Billionstel Milliardstel Millionstel Tausendstel Eins Tausend Million Milliarden Billion
Femto Pico Nano Mikro Milli Eins Kilo Mega Giga Tera
f p n μ m k M G T
22 | 2 Mathematische Methoden
2.2.5 Gleichungen 2.2.5.1 Lineare Gleichungen Gleichungen bestehen immer aus einer linken und einer rechten Seite, wobei beide Sei ten mit einem Gleichheitszeichen miteinander verbunden sind. Mathematische Ope rationen können immer nur auf beiden Seiten gleichzeitig durchgeführt werden, um die Gleichheitsrelation als sogenannte Äquivalenzumformung zu erhalten. Eine Glei chung kann dann gelöst werden, wenn sie genau eine Unbekannte besitzt. Lineare Gleichungen sind die einfachsten in der Mathematik vorkommenden Gleichungen. Sie besitzen die Form ax + b = 0 (2.27) oder können durch Umformungen auf diese Form gebracht werden. Eine derartige Gleichung kann durch einfaches Umstellen direkt nach der Unbekannten x aufgelöst werden. Die allgemeine Lösung einer linearen Gleichung lautet daher: x=−
b a
(2.28)
Vor dem Umstellen müssen einige Konstanten durch Ausklammern oder andere ma thematische Operationen eventuell zunächst zusammengefasst werden, um die so eben hergeleitete Formel verwenden zu können. 2.2.5.2 Quadratische Gleichungen Quadratische Gleichungen zeichnen sich dadurch aus, dass die Unbekannte x in qua drierter Form in der Gleichung enthalten ist. Die allgemeine Form lautet analog zur linearen Gleichung: ax2 + bx + c = 0 (2.29) Quadratische Gleichungen können beispielsweise durch die sogenannte quadratische Ergänzung gelöst werden. Im Laufe der Zeit haben sich allerdings Lösungsformeln eta bliert, mit deren Hilfe derartige Gleichungen schneller und effizienter gelöst werden können. Die einfachste dieser Formeln ist die sogenannte pq-Formel. Um diese Formel anwenden zu können, muss die oben stehende Gleichung zunächst durch a dividiert werden. Damit erhält man (2.30) x2 + px + q = 0 Hier wurde b/a durch p und c/a durch q ersetzt. Die Anwendung der quadratischen Ergänzung führt zu folgender Form: p2 p2 − +q=0 (2.31) 4 4 Durch die Verwendung der 1. binomischen Formel lässt sich die Gleichung erneut um schreiben: p 2 p2 +q=0 (2.32) (x + ) − 2 4 x2 + px +
2.2 Algebra |
23
Jetzt kann die Gleichung nach x aufgelöst werden und man erhält letztlich die als pq-Formel bekannte Lösungsformel:
x1,2 = −
p √ p2 ± −q 2 4
(2.33)
Da es sich um eine quadratische Gleichung handelt, können am Ende zwei Lösungen x1 und x2 oder nur eine einzige oder keine Lösung existieren. In der Regel erweist sich eine dieser beiden Lösungen als unphysikalisch und kann bei genauerer Betrachtung verworfen werden. Anschaulich lässt sich die Existenz von zwei Lösungen damit erklä ren, dass man eine quadratische Gleichung immer als Parabel darstellen kann. Diese kann je nach Richtung die x-Achse zweimal schneiden oder je nach Lage in y-Richtung keinen Schnittpunkt mit ihr aufweisen. 2.2.5.3 Gleichungssysteme Es kommt bei vielen physikalischen Fragestellungen sehr häufig vor, dass nicht nur eine, sondern mehrere Bedingungen erfüllt sein müssen. Für jede dieser Bedingung muss dann eine eigene Gleichung aufgestellt werden, welche für sich genommen nicht gelöst werden kann. Vielmehr kann nur eine Lösung gefunden werden, die alle Glei chungen gleichzeitig erfüllt. Um unbekannte Werte berechnen zu können, müssen mindestens genauso viele Gleichungen wie Unbekannte vorliegen. Andernfalls ist das sich ergebende Gleichungssystem entweder unterbestimmt, weil weniger Gleichungen als Unbekannte zur Verfügung stehen, oder überbestimmt, falls mehr Gleichungen als Unbekannte zur Verfügung stehen. Insbesondere unterbestimmte Gleichungssysteme sind problematisch, weil man ihnen keine eindeutige Lösung mehr zuordnen kann. In diesem Fall müssen weitere Bedingungen hinzugezogen werden, um die unbekannten Parameter ohne Mehrdeutigkeiten bestimmen zu können. Betrachten wir zur Verdeutlichung eine allgemeine Form eines Gleichungssys tems mit den zwei Unbekannten x und y: a1 x + a2 y = b 1
(2.34)
a3 x + a4 y = b 2
(2.35)
Die Art und Weise, wie ein solches System am besten gelöst werden kann, hängt vom jeweiligen Fall ab. Letztlich muss allerdings immer versucht werden, alle Unbekann ten bis auf eine zu eliminieren. Oft bietet es sich dazu an, verschiedene Gleichun gen des Systems miteinander zu addieren oder zu multiplizieren. In diesem Fall kann die obere Gleichung zunächst nach x umgestellt werden, was zu folgendem Ergebnis führt: b1 − a 2 y x= (2.36) a1
24 | 2 Mathematische Methoden
Das Ergebnis kann nun in die zweite Gleichung eingesetzt werden und man erhält dann durch Umstellen nach y: y=
a3 b 1 − a1 b 2 a2 a3 − a1 b 4
(2.37)
Durch das Einsetzen von y in das zuvor erhaltene Ergebnis ergibt sich schließlich für x: x=−
b 4 b 1 − a2 b 2 a2 a3 − a1 b 4
(2.38)
Gleichungssysteme werden in den folgenden Kapiteln dieses Buches an einigen Stel len Verwendung finden, wobei deren Lösungen stets so beschrieben werden, dass sie vom Leser nachvollzogen werden können.
2.3 Analysis 2.3.1 Funktionen 2.3.1.1 Geradengleichung Eine Funktion ist allgemein definiert als die Abbildung eines Definitionsbereichs in ei nen Wertebereich. Diese abstrakte Definition wird besser verständlich, wenn man sie anhand eines Beispiels erläutert. Gegeben sei folgende Funktion y(x) in Abhängigkeit von x: y(x) = mx + b (2.39) Die Größe, von der die Funktion abhängt, wird als Variable bezeichnet und steht in runden Klammern hinter dem Namen der Funktion. Die unveränderbaren Größen – in diesem Fall m und b – werden als Konstanten bezeichnet. Die Funktion y(x) be schreibt eine Gerade mit der Steigung m und dem y-Achsenabschnitt b. Dieser gibt an, in welcher Höhe die y-Achse von der Geraden geschnitten wird. Der Definitionsbereich umfasst alle Werte, die x annehmen kann, wohingegen die Zahlen, die von y(x) an genommen werden können, als Wertebereich bezeichnet werden. Abbildung 2.1 zeigt eine durch die o. g. Funktion beschriebene Gerade in einem kartesischen Koordina tensystem für beliebig gewählte Parameter m und b. Die Steigung der Geraden wird durch den Quotienten von ∆y und ∆x ausgedrückt, d. h., es gilt: y2 − y1 ∆y m= = (2.40) x2 − x1 ∆x Dieser Ausdruck wird folglich auch als Differenzenquotient bezeichnet. Im letzten Schritt wurde die Differenz durch die sog. Delta-Schreibweise ersetzt, um den Aus druck etwas zu verkürzen. Später werden wir sehen, welchen zusätzlichen Vorteil diese Schreibweise besitzt.
2.3 Analysis
|
25
y y2 ∆y y1
∆x b x1
x2
x
Abb. 2.1: Eine beliebige Gerade mit eingezeichne tem Steigungsdreieck und y-Achsenabschnitt.
2.3.1.2 Exponentialfunktion Eine weitere wichtige Funktion in der Physik ist die Exponentialfunktion, die im Ge gensatz zu einem linearen Anstieg mit konstanter Steigung immer dann Verwendung findet, wenn die Änderung einer Größe proportional zur Größe selbst ist. Im einfachs ten Fall lässt sich diese als (2.41) y(x) = b x schreiben. Um damit physikalische Zusammenhänge beschreiben zu können, benö tigt man analog zur Geradengleichung noch weitere Konstanten, um beispielsweise den Anfangswert und die Wachstumsrate eines Prozesses korrekt beschreiben zu kön nen. Als Beispiel betrachten wir die Ausbreitung einer neuartigen und höchst anste ckenden Krankheit. Nehmen wir dazu an, dass in einem Land mit einer großen Bevöl kerungsdichte zu Beginn fünf Personen mit dieser Krankheit befallen sind. Es habe sich ferner gezeigt, dass jede Person im Mittel alle vier Tage eine weitere Person in ihrem Umfeld infiziert. Das bedeutet, dass sich die Anzahl der infizierten Person alle vier Tage etwa verdoppelt. Nach vier Tagen wären demzufolge 5 ⋅ 2 = 10 Personen infiziert, nach acht Tagen entsprechend 5 ⋅ 22 = 20 usw. Bei der Exponentialfunktion steigen die Zuwachsraten mit der Zeit sehr schnell an. So sind nach 40 Tagen bereits 5 ⋅ 210 = 5120 und nach 80 Tagen 5 ⋅ 220 – mehr als fünf Millionen Personen – davon betroffen. Allgemein lässt sich dieser Zusammenhang schreiben als y(x) = ab cx
(2.42)
Die Basis b hat im oben erwähnten Beispiel den Wert 2. Die Größe c gibt den Kehrwert Schrittzahl an, nach der der Funktionswert um die Basis a vergrößert wird. Da dies im obigen Beispiel jeweils nach vier Tagen passiert, ergibt sich c = 1/4 beziehungswei se 0,25. Der Anfangswert von 5 Infizierten kann durch die multiplikative Konstante a festgelegt werden. Setzt man die entsprechenden Konstanten in die Exponentialfunk tion ein, dann gibt der Funktionswert von y die Anzahl der infizierten Personen nach x Tagen an. Im linken Graphen der Abbildung 2.2 ist ein solcher exponentieller Verlauf einer ansteckenden Krankheit am Beispiel des SARS-CoV-2 und der dadurch hervor gerufenen COVID-19-Erkrankung im Zuge der Coronapandemie 2020 dargestellt.
26 | 2 Mathematische Methoden ·104 Deutschland Italien
104 Infektionen
Infektionen
3 2 1 0
Deutschland Italien
103 102 101
0
10 Anzahl Tage
20
0
10
20
Anzahl Tage
Abb. 2.2: Anzahl der akkumulierten Infektionen von SARS-CoV-2 in linearer (links) und logarithmi scher (rechts) Darstellung.
Die jeweiligen Vergleichszahlen für die Länder Deutschland und Italien der ers ten 23 Tage nach Ausbruch der Pandemie in Europa stammen vom Robert Koch-Insti tut (RKI) und der World Health Organisation (WHO). Die y-Achse im rechten Graphen wurde in logarithmischer Weise aufgetragen. Aufgrund der Logarithmengesetze kann der Exponent hierbei als Faktor vor die Exponentialfunktion gezogen werden kann und es entsteht ein annähernd linearer Zusammenhang zwischen y und x. Dies wird beispielsweise ausgenutzt, um Infektionszahlen verschiedener Länder besser verglei chen zu können oder Reproduktionszahlen zu berechnen. Auch sehr einfache Voraus sagen lassen sich mit einem solchen Graphen machen, indem man eine Gerade durch die Punkte legt und dann über einen größeren Zeitraum extrapoliert. Flacht die Kur ve hingegen ab, so lässt sich dies, wie am Beispiel von Italien gut zu sehen ist, in der logarithmierten Darstellung besonders deutlich erkennen. Die Basis einer Exponentialfunktion kann natürlich beliebig gewählt werden, in dem der Parameter c entsprechend angepasst wird. In der Praxis benutzt man häu fig wie in dem bereits beschriebenen Beispiel den Wert 2 oder gegebenenfalls 1/2, wenn der Funktionswert nach gleich großen Einheiten um die Hälfte abnehmen soll. Dies ist beispielsweise bei radioaktiven Zerfällen der Fall. In diesem Fall beschreibt der Kehrwert von c die Halbwertszeit des radioaktiven Präparats. Eine weitere, sehr häufig verwendete Basis ist die bereits erwähnte Euler’sche Zahl e, weil diese gleich ihrer eigenen Ableitung ist. Um die Basen verschiedener Exponentialfunktionen in einander umzurechnen, muss der Parameter c entsprechend angepasst werden. Die Aufgabe ist nun, einen Wert x0 zu finden, der für die neue Basis verwendet werden kann. Dazu muss der Funktionswert an der Stelle x0 gleich der neuen Basis d multi pliziert mit dem Anfangswert a gesetzt werden. Der Parameter a kürzt sich dann weg und es bleibt d = b cx0 (2.43)
2.3 Analysis
|
27
übrig. Anschließend können beide Seiten zur Basis b logarithmiert werden, sodass sich folgender Zusammenhang ergibt: log b d = cx0
(2.44)
Umstellen nach x0 liefert schließlich: x0 =
log b d c
(2.45)
Damit können wir für die neue Exponentialfunktion schreiben: x
y(x) = ad x0
(2.46)
Damit erhalten wir die Möglichkeit, verschiedene Exponentialfunktionen ineinander umzurechnen. 2.3.1.3 Trigonometrische Funktionen Ein wichtiges Teilgebiet der Mathematik, das auch in der Physik eine wichtige Rol le spielt, ist die sogenannte Trigonometrie. Diese beinhaltet wichtige Funktionen, die für geometrische Berechnungen verwendet werden. Die drei wichtigsten Funktionen, die in diesem Buch sehr häufig vorkommen, sind der Sinus, der Kosinus und der Tan gens. Diese drei Funktionen werden in Formeln und Gleichungen mit sin(x), cos(x) und tan(x) angegeben, wobei die Klammer häufig weggelassen wird und anstelle von sin(x) lediglich sin x geschrieben wird, sofern dies nicht zu Missverständnissen führt. Die Bedeutung dieser Funktionen lässt sich sehr gut am Beispiel eines beliebigen rechtwinkligen Dreiecks erläutern, wie es in Abbildung 2.3 dargestellt ist. Der rechte Winkel wird hier mit dem griechischen Buchstaben γ bezeichnet, während die Win kel α und β beliebig gewählt wurden. Die gegenüberliegende Seite zu einem rechten Winkel wird Hypotenuse genannt. Die beiden anderen Seiten, die den rechten Winkel einschließen, werden als Katheten bezeichnet. Die an den Winkel α angrenzende Ka thete nennt sich Ankathete, die andere Gegenkathete. Im Falle des Winkels β gelten die Bezeichnungen ebenso. Die Ankathete des Winkels α ist somit die Gegenkathete von β und umgekehrt. B
c
po
Hy
A
γ
α Ankathete b
Gegenkathete a
β
e us ten
C
Abb. 2.3: Ein beliebiges rechtwinkliges Dreieck mit γ = 90°.
28 | 2 Mathematische Methoden
Für gleich große Winkel ist das Verhältnis der Katheten zueinander und das der Katheten zur Hypotenuse immer gleich groß, sodass sich die beiden Winkel α und β daraus berechnen lassen. Der Sinus eines Winkels ist dabei definiert als das Verhältnis von seiner Gegenkathete zur Hypotenuse: sin α =
Gegenkathete a = Hypotenuse c
(2.47)
Analog gilt für den Kosinus als Verhältnis von Ankathete zur Hypotenuse: cos α =
Ankathete b = Hypotenuse c
(2.48)
Die dritte wichtige Funktion ist der Tangens, der als Verhältnis von Gegenkathete zu Ankathete definiert ist. tan α =
Gegenkathete a = Ankathete b
(2.49)
Ersetzt man a und b mit den Gleichungen (2.47) und (2.48), ergibt sich folgende Be ziehung zwischen den Winkelfunktionen: tan α =
sin α cos α
(2.50)
Zu jeder Winkelfunktion existierst ebenfalls eine Umkehrfunktion, mit deren Hilfe sich der Winkel berechnen lässt. Diese sind der Arkussinus (arcsin oder asin) und der Arkuskosinus (arccos oder acos). Die entsprechende Taste auf dem Taschenrechner wird hierbei in der Regel mit sin−1 oder cos−1 gekennzeichnet. Bei einem rechtwink ligen Dreieck gilt weiterhin der Satz des Pythagoras. Dieser besagt, dass die Summe der Kathetenquadrate gleich dem Quadrat der Hypotenuse ist: a2 + b 2 = c2
(2.51)
Dieses Theorem ist sehr wichtig und kann auf viele verschiedene Weisen hergeleitet werden, wobei dazu an dieser Stelle auf die entsprechende Literatur verwiesen werden soll.
2.3.2 Differenzialrechnung 2.3.2.1 Differenzialquotient Für den Fall, dass eine Funktion y nicht linear von x abhängt, d.h. der Zusammenhang nicht durch eine Gerade beschrieben werden kann, ist eine Berechnung der Steigung
2.3 Analysis
y
| 29
y P2 P1
P1
x
x
Abb. 2.4: Eine Sekante durch zwei Punkte (links) und eine Tangente durch einen Punkt (rechts).
mithilfe von Gleichung (2.40) nicht möglich. Dieser Zusammenhang wird auf der lin ken Seite von Abbildung 2.4 dargestellt. Um eine Gerade mit unbekannter Steigung exakt definieren zu können, müssen stets zwei Punkte P1 und P2 gegeben sein. In die sem Fall wird der Graph allerdings in diesen zwei Punkten von der Gerade geschnit ten, sodass man eine Sekante erhält. Möchte man die exakte Steigung im Punkt P1 bestimmen, also die Steigung einer Tangente berechnen, müsste man die x-Werte in Gleichung (2.40) gleichsetzen. In diesem Fall wird aber die Differenz identisch 0, so dass der Bruch nicht mehr definiert ist. Um die Steigung dennoch berechnen zu können, muss man sich eines mathema tischen Hilfsmittels namens Grenzwert bedienen. Die lateinische Bezeichnung dazu lautet Limes (lim). Durch eine Grenzwertbildung rückt P2 bildlich gesprochen unend lich nahe an P1 heran, sodass aus der ursprünglichen Sekante eine Tangente wird, wie es auf der rechten Seite von Abbildung 2.4 dargestellt ist. Mathematisch betrachtet er hält man dann aus dem bereits definierten Differenzenquotienten den sogenannten Differenzialquotienten. Dieser wird analog zu Gleichung (2.40) wie folgt definiert: m = lim
x 2 →x 1
y2 − y1 dy = = y (x) x2 − x1 dx
(2.52)
Man spricht in diesem Zusammenhang von der ersten Ableitung. In der Physik hat sich hierfür die sogenannte Doppel-d-Schreibweise etabliert. Hierbei wird jedes Delta durch ein d ersetzt. Dies soll die Besonderheit des unend lich kleinen Abstandes deutlich machen. Die infinitesimal kleine Änderung dx wird als Differenzial bezeichnet. Den Quotienten d/dx bezeichnet man als Differenzialope rator, da er mathematisch erst dann einen Sinn ergibt, wenn man ihn auf eine Funk tion anwendet. Auch verwendet man in der Physik bei expliziten Ableitungen nach der Zeit eine Schreibweise, bei der über der Funktion ein Punkt geschrieben wird. In der Mathematik wird hingegen häufig die Strich-Schreibweise verwendet, bei der ein vertikaler, hochgestellter Strich hinter dem Namen der Funktion eingefügt wird. Alle diese Schreibweisen df (2.53) = f ̇ = f (t) dt
30 | 2 Mathematische Methoden
sind gleichbedeutend und bezeichnen die Ableitung der Funktion, die als die Stei gung m an einer beliebigen Stelle interpretiert wird. Bildet man die zweite Ableitung, also die Ableitung der Ableitung, so kann man dies durch f (t) beziehungsweise f ̈ ausdrücken. Für die Schreibweise mit Differenzialen ergibt sich durch erneutes Ein setzen des Differenzialquotienten der Ausdruck: f (x) =
df d dx d2 f = dx dx2
(2.54)
Der Differenzialquotient soll nun am Beispiel der Parabel y(x) = x2
(2.55)
genauer untersucht werden. Setzt man diese Funktion in Gleichung (2.52) ein, so er hält man: x2 − x21 (2.56) f (x) = lim 2 x 2 →x 1 x 2 − x 1 Der Zähler lässt sich dabei wie folgt umformen: f (x) = lim
x 2 →x 1
(x2 − x1 )(x2 + x1 ) x2 − x1
(2.57)
Damit lassen sich Zähler und Nenner kürzen. Nach der Grenzwertbildung erhält man: f (x) = 2x
(2.58)
Damit kann die Steigung der Parabel f(x) = x2 an jeder beliebigen Stelle x berechnet werden. 2.3.2.2 Ableitungsregeln Bei sehr komplizierten Funktionen ist das Berechnen der Ableitung über den Diffe renzialquotienten zwar möglich, aber oft sehr aufwendig. Deshalb sollen im weiteren Verlauf dieses Abschnittes Regeln angegeben werden, die die Berechnung von Stei gungen im Allgemeinen vereinfachen. Die Herleitungen dieser Regeln aus dem Diffe renzialquotienten können in vielen Büchern zur Analysis nachgeschlagen werden. 2.3.2.2.1 Potenzregel In physikalischen Funktionen kommt die Variable x oft mit unterschiedlichen Poten zen vor. Das Verständnis der nun aufgestellten Ableitungsregel ist demzufolge sehr wichtig. Allgemein sagt diese aus: Wenn eine Funktion von der n-ten Potenz von x in der Form (2.59) y(x) = x n abhängt, dann ergibt sich für die Ableitung: y (x) = nx n−1
(2.60)
2.3 Analysis
| 31
Der Exponent wird demzufolge vor die Variable gezogen, nach der abgeleitet wird, und verringert sich selbst dabei um eins. Für den Fall n = 2 wurde die Gültigkeit dieser Regel bereits im vorigen Abschnitt gezeigt. 2.3.2.2.2 Summenregel Wenn eine Funktion f(x) als Summe von zwei oder mehreren Funktionen h(x) und g(x) in der Form y(x) = f(x) + g(x) (2.61) dargestellt werden kann, dann berechnet sich die Ableitung wie folgt: y (x) = f (x) + g (x)
(2.62)
In Worten bedeutet dieser Zusammenhang: Die Ableitung einer Summe von Funktio nen ist identisch mit der Summe der Ableitung jeder einzelnen Funktion. 2.3.2.2.3 Faktorregel Wird eine Funktion y(x) mit einer Konstanten c multipliziert, d. h., es gelte y(x) = cf(x) ,
(2.63)
so bleibt die Konstante unverändert erhalten und lediglich die Funktion f(x) wird ab geleitet: y (x) = cf (x)
(2.64)
2.3.2.2.4 Produktregel Oft müssen Funktionen abgeleitet werden, die sich wiederum als Produkt zweier oder mehrerer Funktionen schreiben lassen. Dies lässt sich mathematisch wie folgt ausdrü cken: y(x) = f(x) ⋅ g(x) (2.65) Die Regel für die Ableitung einer solchen Funktion ist gegeben durch: y (x) = f (x) ⋅ g(x) + f(x) ⋅ g (x)
(2.66)
2.3.2.2.5 Quotientenregel Eine ähnliche Regel gilt für Funktionen, deren Terme sich als Quotient zweier Funk tionen darstellen lassen. In diesem Fall ergibt sich für die Funktion y(x) =
f(x) g(x)
(2.67)
32 | 2 Mathematische Methoden
die folgende Ableitung: y (x) =
f (x) ⋅ g(x) − g(x) ⋅ f (x) g2 (x)
(2.68)
Bis auf das Minuszeichen zwischen den beiden Produkten und dem Quadrat des Nen ners im Nenner der Ableitung ist diese Regel identisch mit der Produktregel. 2.3.2.2.6 Kettenregel In der Physik kommt es sehr häufig vor, dass Ableitungen von verschachtelten Funk tionen gebildet werden müssen. Das bedeutet, dass eine Funktion nicht nur von einer Variablen abhängt, sondern stattdessen erneut von einer Funktion dieser Variablen. Dieser Sachverhalt lässt sich wie folgt schreiben: y(x) = f(g(x))
(2.69)
Hierbei hängt die Funktion g von x ab, während f als Funktion von g geschrieben werden kann. f wird daher als die äußere Funktion und g als die innere Funktion be zeichnet. Für die Ableitung gilt dann: y (x) = f (g(x)) ⋅ g (x)
(2.70)
Diese Gleichung sagt aus, dass die Ableitung einer verschachtelten Funktion gleich dem Produkt der Ableitung der äußeren Funktion (äußere Ableitung) und der Ablei tung der inneren Funktion (innere Ableitung) ist. 2.3.2.3 Wichtige Funktionen Neben den beschriebenen Ableitungsregeln müssen an dieser Stelle noch die Ablei tungen bestimmter Funktionen besprochen werden, die in der Physik allgemein und speziell in diesem Buch häufig vorkommen. So ist zum Beispiel die Ableitung der Ex ponentialfunktion allgemein gegeben durch: y(x) = a x ⇒ y (x) = a x ln a
(2.71)
Es gibt somit genau eine Basis, bei der die Ableitung wieder die ursprüngliche Expo nentialfunktion ergibt. Hierbei handelt es sich um die Euler’sche Zahl: y(x) = e x ⇒ y (x) = e x
(2.72)
Ähnlich wie die 0 das neutrale Element der Addition und die 1 das neutrale Element der Multiplikation ist, wird die natürliche Exponentialfunktion als neutrales Element der Differentiation bezeichnet.
2.3 Analysis
| 33
Man kann zeigen, dass die Ableitung einer Sinusfunktion gleich der Kosinusfunk tion ist, wohingegen sich die Ableitung der Kosinusfunktion als negative Sinusfunk tion darstellen lässt: y(x) = sin x ⇒ y (x) = cos x
(2.73)
y(x) = cos x ⇒ y (x) = − sin x
(2.74)
Aus diesen Gleichungen ist ersichtlich, dass die vierfache Ableitung des Sinus erneut die Ausgangsfunktion ergibt. Eine dritte Funktion, die häufig abgeleitet werden muss, ist der natürliche Loga rithmus ln(x). Diese entspricht exakt dem Kehrwert der Variablen x: y(x) = ln x ⇒ y (x) =
1 x
(2.75)
In vielen Fällen tauchen die Funktionen verschachtelt auf, sodass die Kettenregel ver wendet werden muss, um die Ableitungen zu berechnen.
2.3.3 Integralrechnung Mithilfe der Integralrechnung ist es möglich, Flächen unter Graphen zu berechnen. Während dies für konstante Funktionen und Geraden noch einfach möglich ist, be nötigt man für beliebige Funktionen spezielle Hilfsmittel, welche in diesem Abschnitt vorgestellt werden. Die linke Seite von Abbildung 2.5 zeigt eine Gerade mit konstan ter Steigung und eine beliebig ausgewählte Fläche unter dieser Geraden. Das Ziel ist nun die Berechnung des markierten Flächeninhaltes zwischen den Grenzen x0 und x1 . Dazu muss zunächst der Sockel berechnet werden, bei dem es sich um ein Rechteck handelt, das entlang der x-Achse von der Seite ∆x = x2 − x1 und in y-Richtung vom y-Achsenabschnitt b aufgespannt wird. Diese Fläche berechnet sich gemäß b(x2 − x1 ). Bei dem darüberliegenden Teil handelt es sich um ein Dreieck, das von der y-Achse bei x = 0 bis zur Stelle x2 verläuft. Da wir lediglich an der Fläche zwischen x1 und x2 y y y2 y1
x1
x2
x
x
Abb. 2.5: Fläche unter einer Geraden (links) und Einteilung der Fläche unter einer beliebigen Funkti on in kleine Flächenstücke (rechts).
34 | 2 Mathematische Methoden
interessiert sind, muss der linke Teil des Dreiecks, der sich außerhalb der Markierung befindet, von der gesamten Dreiecksfläche abgezogen werden. Der Flächeninhalt ei nes allgemeinen Dreiecks berechnet sich gemäß der Formel 1 Gh , (2.76) 2 wobei G die Grundfläche und h die Höhe ist. In diesem Fall ist die Grundfläche für das gesamte Dreieck x2 und die Höhe gleich der Steigung multipliziert mit x2 , also mx2 . Für das kleine Dreieck ist die Grundfläche gleich x1 und die Höhe mx1 . Die Berech nung der Differenz aus beiden Flächen liefert somit schließlich: A=
1 1 A = ( mx22 + bx2 ) − ( mx21 + bx1 ) 2 2
(2.77)
Damit kann die Fläche zwischen zwei Punkten unter einer beliebigen Geraden exakt ausgerechnet werden. Es ist offensichtlich, dass die Fläche unter einer beliebigen Funktion nicht auf die gleiche Art berechnet werden kann. Stattdessen wird an dieser Stelle der Trick ange wendet, die Gesamtfläche in kleine Rechtecke aufzuteilen. Für jedes dieser Rechtecke kann der Flächeninhalt exakt berechnet werden. Summiert man die Flächen aller Teil stücke auf, dann erhält man den Flächeninhalt unter dem Graphen. Dabei wird deut lich, dass die Fläche der Rechtecke sich umso näher an die wirkliche Fläche annähert, je kleiner die Intervalle gemacht werden. Für den Grenzfall unendlich schmaler Recht ecke erhält man dann die exakte Fläche. Hierbei ist zu beachten, wie im Beispiel eines Graphen auf der rechten Seite von Abbildung 2.5 zu sehen ist, dass für jede Stelle auf der x-Achse zwei unterschiedlich große Rechtecke eingezeichnet sind. Eines der bei den berührt den Graphen an der linken Ecke, das andere an der rechten Ecke. Dadurch ergeben sich automatisch unterschiedliche Höhen für die einzelnen Flächenstücke. Während das markierte Rechteck einen zu kleinen Flächeninhalt besitzt, ist dieser bei dem gestrichelten Rechteck zu groß. Macht man die Intervalle immer kleiner, nä hern sich beide Flächen immer mehr an, bis sie schließlich identisch mit der exakten Fläche unter dem Graphen sind. 2.3.3.1 Hauptsatz der Differenzial- und Integralrechnung Die praktische Berechnung von Flächen mit unendlich kleinen Rechtecken ist sehr problematisch, weshalb es sinnvoll ist, Rechenregeln zu finden, mit denen dies ein fach möglich ist. Bei der Differenzialrechnung wurden zwei Punkte auf einem Gra phen gewählt und die Abstände zwischen den Punkten durch Grenzwertbildung so klein gemacht, dass sie praktisch zusammenfallen und somit die Steigung einer Tan gente in diesem Punkt angeben. Bei der Integralrechnung geht man einen ähnlichen Weg und verkleinert die Rechtecke zur Bestimmung des Flächeninhaltes so lange, bis die Summe über alle Rechtecksflächen die Gesamtfläche unter dem Graphen ergibt. Die Vermutung liegt daher nahe, dass Differenzial- und Integralrechnung eng mitein ander verknüpft sind. Tatsächlich lässt sich das Verfahren des Integrierens wie eine
2.3 Analysis
| 35
Summe über infinitesimal kleine Rechtecke dx vorstellen. Anstelle des Summenzei chens verwendet man aber stattdessen das Integral. Die Fläche unter einer beliebigen Funktion y(x) zwischen den Stellen x1 und x2 wird demzufolge geschrieben als: x2
A = ∫ f(x) dx
(2.78)
x1
Mathematisch lässt sich zeigen, dass das Integrieren die Umkehrung der Differentiati on ist. Man spricht daher umgangssprachlich beim Integrieren auch vom „Aufleiten“. Dieser Zusammenhang kann wie folgt geschrieben werden: ∫ f(x) dx F(x)
f(x) d dx F(x)
Die Funktion F(x) wird hierbei als Stammfunktion von f(x) bezeichnet. Generell unter scheidet man zwischen bestimmten Integralen der Form b
∫ f(x) dx = F(x)|ba = F(b) − F(a)
(2.79)
a
und unbestimmten Integralen. Bei bestimmten Integralen werden nach der Integrati on die Grenzen in die Stammfunktion eingesetzt und anschließend wird die Differenz dieser beiden Werte gebildet, wie im Beispiel mit der Geraden gezeigt wurde. Unbe stimmte Integrale unterscheiden sich dadurch, dass sie keine Grenzen besitzen und als Ergebnis die analytische Stammfunktion bestehen bleibt. Jede zusätzliche additi ve Konstante würde bei einer Ableitung allerdings verschwinden. Deshalb gilt für ein unbestimmtes Integral immer ∫ f(x) dx = F(x) + const ,
(2.80)
wobei die hinzugefügte Konstante als Integrationskonstante bezeichnet wird, die bei bestimmten Integralen aus der sich ergebenden Differenz herausfällt. 2.3.3.2 Integrationsregeln Generell ist das Integrieren von Funktionen schwerer als das Differenzieren. Dies liegt darin begründet, dass es für die Ableitung feste Regeln gibt, die uneingeschränkt an gewendet werden können. Aufgrund des Hauptsatzes der Differenzial- und Integral rechnung können einige dieser Regeln zwar auf die Integration übertragen werden. Die Anwendung erweist sich aber oft schwieriger. Ein unter Schülern und Studenten sehr beliebter Spruch lautet (oft auch in abgewandelter Form):
36 | 2 Mathematische Methoden
Differenzieren ist Handwerk, Integrieren ist Kunst. Sehr oft kommt es sogar vor, dass keine Stammfunktion gefunden werden kann. In diesem Fall lässt sich das Integral mit festen Grenzen aber immer noch numerisch berechnen, wobei der dadurch entstehende Fehler umso kleiner wird, je feiner man die Unterteilung der Flächenstücke macht. 2.3.3.2.1 Potenzregel Bei der Potenzregel der Integration handelt es sich um die direkte Umkehrung der Po tenzregel der Differentiation, da das Integral über die Ableitung wieder die ursprüng liche Funktion ergeben muss. Für die Integration über eine Potenz ergibt sich somit die folgende Formel: ∫ x n dx =
1 n+1 x n+1
(2.81)
Dieser Zusammenhang kann leicht geprüft werden, indem man die Ableitung der rechten Seite bildet und diese mit der ursprünglichen Funktion vergleicht. 2.3.3.2.2 Summenregel Analog zur Ableitung von Summen lässt sich das Integral dementsprechend auf die einzelnen Summanden aufteilen: ∫ (f(x) + g(x)) dx = ∫ f(x) dx + ∫ g(x) dx
(2.82)
2.3.3.2.3 Partielle Integration Auch die Produktregel der Differentiation lässt sich auf die Integralrechnung über tragen, falls man über ein Produkt integrieren muss. Beim Integrieren spricht man hierbei von partieller Integration. Wenn man die Produktregel geschickt aufschreibt, dann leitet sich daraus unmittelbar folgender Zusammenhang ab: ∫(f (x) ⋅ g(x)) dx = f(x) ⋅ g(x) − ∫(f(x) ⋅ g (x)) dx
(2.83)
Zunächst muss also in einer gegebenen Funktion ein Produkt aus einer Ableitung f (x) und einer Funktion g(x) ausfindig gemacht werden. Anschließend muss f (x) zu f(x) integriert und g(x) zu g (x) abgeleitet werden. Die daraus resultierenden Funktionen müssen anschließend in die Formel eingesetzt werden, um damit das Integral über das Produkt zu berechnen.
2.3 Analysis
| 37
Diese Regel soll am Beispiel 1
I = ∫ xe x dx
(2.84)
0
erläutert werden. Wir definieren hier f(x) = x und g(x) = e x . Dies führt gemäß der oben genannten Formel zum Ergebnis: 1
I = xe x |10 − ∫ e x dx = 1
(2.85)
0
2.3.3.2.4 Variablensubstitution Auch die bereits beschriebene Kettenregel kann auf die Integralrechnung übertragen werden. Sie muss immer dann verwendet werden, wenn über ein Produkt einer Funkti on einer anderen Funktion und deren Ableitung integriert wird. Dies lässt sich schrei ben als: ∫ f(x) dx = ∫ f(g(x)) ⋅ g (x) dx
(2.86)
Die Variablensubstitution lässt sich immer dann verwenden, wenn man einem Pro dukt aus einer Funktion und deren innerer Ableitung begegnet. Wichtig zu beachten ist außerdem, dass bei einer Variablensubstitution ebenfalls die Grenzen angepasst werden müssen. Als Beispiel betrachten wir das Integral: 1
I = ∫ x sin(2x2 ) dx
(2.87)
0
Die innere Funktion kann hier als g(x) = 2x2 identifiziert werden. Bildet man hiervon die Ableitung, so erhält man: dg = 4x dx Nun stellt man diesen Bruch aus Differenzialen nach dx um und setzt ihn in die ur sprüngliche Funktion ein. Außerdem werden die Grenzen durch g(0) und g(1) ersetzt, welche aber in diesem Fall unverändert bleiben. Dies ergibt dann das einfach zu lö sende Integral: 1
I=∫
sin(g) dg ≈ 0.35 4
(2.88)
0
Wie auch bei den anderen Regeln benötigt man für die korrekte Anwendung al lerdings etwas Erfahrung im Lösen von Integralen. Heutzutage kommen allerdings häufig Computeralgebrasysteme zum Einsatz, die Integrale numerisch berechnen und sogar Stammfunktionen berechnen können.
38 | 2 Mathematische Methoden
2.4 Vektorrechnung 2.4.1 Definition Vektoren werden üblicherweise durch Pfeile im Raum dargestellt. Ein Vektor ist durch seine Richtung und seinen Betrag, also seine Länge vollständig definiert. Dementspre chend lassen sich die Pfeile im Raum beliebig verschieben und repräsentieren dabei denselben Vektor. Die Pfeile können dabei folglich im Raum parallel verschoben wer den, ohne dabei den Wert des Vektors an sich zu ändern. Dieses Verfahren wird später bei der Herleitung einiger physikalischer Zusammenhänge ausgenutzt werden. Vekto ren werden üblicherweise mit einem Pfeil über dem jeweiligen Buchstaben dargestellt. Lässt man diesen Weg, dann bezieht man sich in der Regel auf den Betrag beziehungs weise die Länge des Vektors. So beschreibt a⃗ einen Vektor und a entsprechend den Betrag des Vektors a.⃗ Im dreidimensionalen Raum werden Vektoren mithilfe von drei Komponenten definiert: ax (2.89) a⃗ = ( a y ) az Jede Komponente gibt die Länge des Vektors in eine der drei Raumrichtungen x, y und z an. Die Bedeutung der einzelnen Komponenten ist in Abbildung 2.6 grafisch dargestellt. Man kann die Länge eines Vektors verändern, indem man diesen mit einer Zahl multipliziert: λa x λ a⃗ = (λa y ) λa z
(2.90)
z
a az y
(0,0,0) ax x
ay
Abb. 2.6: Ein beliebiger Vektor a⃗ in einem drei dimensionalen Koordinatensystem.
2.4 Vektorrechnung |
39
Hierbei muss jede Komponente mit dieser Zahl multipliziert werden. Der sich daraus ergebende Vektor ist um den Faktor λ länger als der ursprüngliche Vektor.
2.4.2 Addition von Vektoren Eine der wichtigsten Operationen, die mit Vektoren durchgeführt werden können, ist die Vektoraddition zweier oder mehrerer Vektoren. Zwei Vektoren a⃗ und b⃗ können so mit vektoriell zu einem neuen Vektor c⃗ addiert werden. Die Schreibweise hierfür lautet wie folgt: a⃗ + b⃗ = c⃗ (2.91) Die Addition zweier Vektoren ist gleichbedeutend mit der Addition ihrer Komponen ten: ax + bx c⃗ = a⃗ + b⃗ = ( a y + b y ) az + bz
(2.92)
Abbildung 2.7 zeigt eine Parallelverschiebung der Pfeile für die Vektoren a⃗ und b⃗ und eine anschließende Addition zum neuen Vektor c.⃗ Die Differenz zweier Vektoren ist damit ebenfalls eindeutig definiert, da sich beispielsweise der Vektor b⃗ als Differenz der Vektoren c⃗ und a⃗ beschreiben lässt: cx − ax ⃗b = c⃗ − a⃗ = ( c y − a y ) cz − cz
(2.93)
Grafisch lässt sich dies folgendermaßen veranschaulichen: Verschiebt man die Vek torpfeile so, dass die Spitze eines Vektors mit dem Fußpunkt eines anderen Vektors zusammenfällt, so ist der sich daraus ergebende Verbindungspfeil die Summe beider Vektoren. Möchte man hingegen den Differenzvektor ermitteln, so muss wie bei der Addition normaler Zahlen der eine Vektor mit dem Inversen des anderen Vektors ad
b b
c a
a Abb. 2.7: Parallelverschiebung und Addition zweier Vektoren.
40 | 2 Mathematische Methoden
diert werden. Hierbei dreht sich die Richtung des zweiten Vektors aufgrund des Mi nuszeichens vor allen Komponenten um. Man kann für jede der drei Raumachsen einen Basisvektor der Länge< 1 wie folgt definieren: 1 0 0 e⃗ y = (1) e⃗ z = (0) (2.94) e⃗ x = (0) 0 0 1 Der Vorteil dieser Definition liegt darin, dass jeder beliebige Vektor a⃗ damit aufgrund der Definition der Vektoraddition als Linearkombination dieser drei Basisvektoren dargestellt werden kann: a⃗ = a x e⃗ x + a y e⃗ y + a z e⃗ z (2.95) Diese Schreibweise wird sich sowohl bei Rechnungen mit dem Skalar- als auch dem Vektorprodukt als nützlich erweisen.
2.4.3 Skalarprodukt Das Ergebnis eines Produkts zweier Vektoren muss mathematisch zunächst definiert werden. Man hat sich darauf geeinigt, dass das sogenannte Skalarprodukt zweier Vek toren die Projektion des einen auf den anderen Vektor bedeutet, wie auf der linken Seite von Abbildung 2.8 dargestellt ist. Dementsprechend lautet die mathematische Definition des Skalarprodukts für zwei Vektoren a⃗ und b:⃗ a⃗ ⋅ b⃗ = ab cos θ
(2.96)
Das Skalarprodukt wird üblicherweise mit einem Punkt dargestellt. Im Gegensatz zu der Multiplikation zweier Zahlen darf dieser allerdings nicht weggelassen werden. Als Ergebnis erhält man das Produkt der beiden Längen a und b und zusätzlich eine Multi plikation mit dem Kosinus des von beiden Vektoren eingeschlossenen Winkels θ. Das Skalarprodukt ist kommutativ: a⃗ ⋅ b⃗ = b⃗ ⋅ a⃗
(2.97)
Außerdem ist es sowohl in Bezug auf die Multiplikation mit einer Konstanten r als auch auf ein weiteres Skalarprodukt assoziativ: a⃗ ⋅ (r b)⃗ = (r a)⃗ ⋅ b⃗ = r(a⃗ ⋅ b)⃗
(2.98)
2.4 Vektorrechnung | 41
c b b θ b cos θ
a
θ a
Abb. 2.8: Zur Definition des Skalarprodukts (links) und des Vektorprodukts (rechts).
Auch das Distributivgesetz kann unmittelbar angewendet werden, wobei die Reihen folge der Multiplikation keine Rolle spielt: a⃗ ⋅ (b⃗ + c)⃗ = a⃗ ⋅ b⃗ + a⃗ ⋅ c⃗
(2.99)
(a⃗ + b)⃗ ⋅ c⃗ = a⃗ ⋅ c⃗ + b⃗ ⋅ c⃗
(2.100)
Unter Verwendung der bereits eingeführten Basisvektoren lässt sich für das Ska larprodukt von a⃗ und b⃗ auch schreiben: a⃗ ⋅ b⃗ = (a x e⃗ x + a y e⃗ y + a z e⃗ z ) ⋅ (b x e⃗ x + b y e⃗ y + b z e⃗ z )
(2.101)
Multipliziert man das Skalarprodukt aus, dann muss jeder Summand aus der ersten Klammer mit jedem Summanden in der zweiten Klammer multipliziert werden. Dies ergibt dann: a⃗ ⋅ b⃗ = a x b x e⃗ x ⋅ e⃗ x + a y b x e⃗ y ⋅ e⃗ x + a z b x e⃗ z ⋅ e⃗ x + a x b y e⃗ x ⋅ e⃗ y + a y b y e⃗ y ⋅ e⃗ y + a z b y e⃗ z ⋅ e⃗ y + a x b z e⃗ x ⋅ e⃗ z + a y b z e⃗ y ⋅ e⃗ z + a z b z e⃗ z ⋅ e⃗ z Der eingeschlossene Winkel zwischen zwei identischen Einheitsvektoren beträgt im mer 0° und deren Betrag ist stets 1. Damit ergibt sich für das Skalarprodukt von Ein heitsvektoren mit sich selbst e⃗x ⋅ e⃗ x = 1. Das Skalarprodukt zweier ungleicher Einheits vektoren ist immer identisch 0, da diese senkrecht aufeinander stehen müssen. Das Skalarprodukt zweier Vektoren a⃗ und b⃗ lässt sich damit aus der Summe der Produkte ihrer Komponenten berechnen: a⃗ ⋅ b⃗ = a x b x + a y b y + a z b z
(2.102)
Für das Skalarprodukt eines Vektors mit sich selbst erhält man deshalb: a⃗ ⋅ a⃗ = a2x + a2y + a2z = |a|2
(2.103)
42 | 2 Mathematische Methoden Dies entspricht dem Quadrat der Länge des Vektors a,⃗ wie man mithilfe des Satzes des Pythagoras recht einfach zeigen kann. Die Länge eines Vektors lässt sich demnach mit der folgenden Formel berechnen: a = √a⃗ ⋅ a⃗
(2.104)
Dividiert man einen Vektor durch seine Länge, so erhält man einen Vektor der Länge 1, d. h. einen Einheitsvektor in Richtung des ursprünglichen Vektors. Man nennt diese Division auch Normierung. Damit ergibt sich der Einheitsvektor von a⃗ zu: a⃗ â⃗ = a
(2.105)
Einheitsvektoren erhalten dabei in der Regel ein kleines Dach über dem Vektorpfeil, um deutlich zu machen, dass ihre Länge exakt den Wert 1 hat.
2.4.4 Vektorprodukt Das Vektorprodukt zweier Vektoren a⃗ und b⃗ wird als c⃗ = a⃗ × b⃗
(2.106)
geschrieben. Es ergibt sich ein neuer Vektor c,⃗ der senkrecht auf a⃗ und b⃗ steht. Wäh rend der Betrag des Skalarproduktes die Länge eines Vektors darstellt, wird das Vek torprodukt so definiert, dass sein Betrag die Fläche des von a⃗ und b⃗ aufgespannten Parallelogramms repräsentiert, d. h., es gilt: |a⃗ × b|⃗ = ab sin θ
(2.107)
Hierbei ist θ wieder der Winkel zwischen den beiden Vektoren. Für das Kreuzprodukt gilt das Distributivgesetz, analog zum Skalarprodukt, in zweifacher Hinsicht: a⃗ × (b⃗ + c)⃗ = a⃗ + b⃗ + a⃗ × c⃗
(2.108)
(a⃗ × b)⃗ × c⃗ = a⃗ × c⃗ + b⃗ × c⃗
(2.109)
Weiterhin ist zu berücksichtigen, dass das Kreuzprodukt antikommutativ ist. Das be deutet, ein Vertauschen der beiden Vektoren bedingt einen Wechsel des Vorzeichens: a⃗ × b⃗ = −b⃗ × a⃗ Das Assoziativgesetz gilt beim Kreuzprodukt nicht.
(2.110)
2.4 Vektorrechnung | 43
Ähnlich zum Skalarprodukt lässt sich das Kreuzprodukt ebenfalls mithilfe der einzelnen Komponenten berechnen. Dazu wird das Kreuzprodukt a⃗ und b⃗ mit den jeweiligen Einheitsvektoren ausgeschrieben: a⃗ × b⃗ =a x b x e⃗ x × e⃗ x + a y b x e⃗ y × e⃗ x + a z b x e⃗ z × e⃗ x + a x b y e⃗ x × e⃗ y + a y b y e⃗ y × e⃗ y + a z b y e⃗ z × e⃗ y + a x b z e⃗ x × e⃗ z + a y b z e⃗ y × e⃗ z + a z b z e⃗ z × e⃗ z
(2.111)
In dieser Schreibweise fallen alle Kreuzprodukte gleicher Einheitsvektoren weg, weil θ in diesem Fall 0° beträgt und der Sinus verschwindet. Übrig bleiben lediglich die Produkte ungleicher Vektoren: a⃗ × b⃗ =a y b x e⃗ y × e⃗ x + a z b x e⃗ z × e⃗ x + a x b y e⃗ x × e⃗ y + a z b y e⃗ z × e⃗ y + a x b z e⃗ x × e⃗ z + a y b z e⃗ y × e⃗ z
(2.112)
Im nächsten Schritt können die Produkte mit identischen Einheitsvektoren ausge klammert werden. Hierbei ist allerdings die Verwendung des Minuszeichens beim Vertauschen der Einheitsvektoren im Kreuzprodukt zu berücksichtigen. Damit ergibt sich unter Anwendung des Distributivgesetzes: a⃗ × b⃗ = (a y b x − a x b y )e⃗ y × e⃗ x + (a z b x − a x b z )e⃗ z × e⃗ x + (a x b y − a y b z )e⃗ x × e⃗ y (2.113) Berücksichtigt man nun, dass das Kreuzprodukt zweier Einheitsvektoren den dritten Einheitsvektor ergibt, der senkrecht auf diesen steht, so erhält man in Vektorschreib weise: ay bz − by az a⃗ × b⃗ = ( a z b x − b z a x ) ax by − bx ay
(2.114)
Das Kreuzprodukt hat seinen Namen daher, dass die Komponenten der beiden Vekto ren jeweils kreuzweise miteinander multipliziert werden.
2.4.5 Vektoranalysis 2.4.5.1 Gradient Neben einfachen Operationen, wie Addition und Multiplikation von Vektoren, kann ebenfalls Differenzialrechnung mit Vektoren betrieben werden. So lässt sich beispiels weise ein Vektor mit Ableitungen in alle drei Raumrichtungen wie folgt definieren: d dx d ∇⃗ = ( ) dy d dz
(2.115)
44 | 2 Mathematische Methoden Das Symbol ∇ wird Nabla-Operator genannt. In der Physik kommen häufig Felder vor, die jedem Punkt im Raum eine Zahl (skalare Felder) oder einen Vektor (Vektorfeld) zu ordnen. Ein Beispiel für ein Skalarfeld ist die Temperaturverteilung in einem Zimmer. So lässt sich mit der Funktion T(x, y, z) für die Kombination aus allen drei Koordina ten eine bestimmte Temperatur angeben. Möchte man wissen, in welcher Richtung die Änderung der Temperatur am größten ist, lässt sich analog zur Berechnung der Steigung einer eindimensionalen Funktion der Nabla-Operator auf das Skalarfeld an wenden. Man bezeichnet dies als die Bildung des Gradienten einer Funktion: grad f = ∇f⃗
(2.116)
Hierbei muss die Funktion zur Berechnung der Vektoreinträge nach jeder ihrer Varia blen abgeleitet werden: df dx df ∇f⃗ = ( ) (2.117) dy df dz Wir werden im Folgenden noch weitere Möglichkeiten betrachten, die der Nabla-Ope rator zur Verfügung stellt. 2.4.5.2 Divergenz Neben Skalarfeldern existieren ebenfalls Vektorfelder, die jedem Punkt im Raum einen Vektor zuordnen. Hier wäre als Beispiel das Gravitationsfeld zu nennen. In manchen Fällen möchte man quantitativ erfassen, wie stark die Vektoren des Feldes auseinanderdriften (divergieren). Dazu kann der Nabla-Operator skalar mit dem Vek tor, der das Feld beschreibt, multipliziert werden, was zur Berechnung der Divergenz führt: div v⃗ = ∇⃗ ⋅ v⃗
(2.118)
Die Divergenz eines Vektorfeldes ist somit ein Maß für die Quellstärke des Feldes. Ver schwindet die Divergenz eines Feldes in jedem Punkt, so besitzt das Feld keine Quelle.
2.4.5.3 Rotation Neben der Divergenz von einer Quelle können Vektorfelder ebenfalls verwirbelt sein. Dies kann man sich anschaulich anhand von Magnetfeldlinien um einen Stabmagne ten herum vorstellen. Im Gegensatz zu elektrischen Feldvektoren, die von einer La dung ausgehen, besitzen Magnetfeldlinien keine Quelle. Man kann daher den NablaOperator über das Vektorprodukt mit dem Feldvektor multiplizieren und erhält damit
2.5 Zusammenfassung |
45
ein Maß für die Rotation des Feldes: rot v⃗ = ∇⃗ × v⃗
(2.119)
Ist der Wert 0, so verschwindet die Rotation und es handelt es sich um ein reines Quel lenfeld.
2.5 Zusammenfassung Zunächst wird in diesem Kapitel auf die verschiedenen Zahlbereiche und die Wich tigkeit der Arithmetik im alltäglichen Leben zur Erfassung quantitativer Zusammen hänge eingegangen. Davon ausgehend werden mathematische Operationen wie Addi tion und Multiplikationen definiert, mit denen die Zahlen und somit auch physikali sche Größen miteinander verknüpft werden können. Mithilfe der daraus gewonnenen Gesetzmäßigkeiten wird die Rechnung mit Brüchen motiviert, wobei hierbei insbe sondere auf die Erweiterung von Brüchen und die Berechnung von Doppelbrüchen eingegangen wird. Im nächsten Schritt wird auf die Verwendung von Zehnerpoten zen speziell in der Physik eingegangen, um damit sehr große oder sehr kleine Zah lenwerte anschaulich darstellen zu können. Physikalische Größen werden in der Phy sik häufig mit Gleichungen oder Gleichungssystemen beschrieben. Aus diesem Grund wird noch einmal ausführlich darauf eingegangen und eine kurze Einführung in die verschiedenen Lösungskonzepte linearer und quadratischer Gleichungen präsentiert. Darauf aufbauend werden die Konzepte der Analysis vorgestellt, wobei zunächst auf die Definition von Funktionen eingegangen wird sowie einige wichtige Funktionen wie Exponentialfunktion genauer betrachtet werden. Mithilfe der Konzepte aus Diffe renzial- und Integralrechnung können sowohl Steigungen von beliebigen Funktionen als auch Flächeninhalte unter Graphen durch die Anwendung bestimmter Regeln, die an dieser Stelle zusammengefasst werden, auf einfache Weise berechnet werden. Zur Vervollständigung dieses Kapitels wird zum Schluss die Vektorrechnung vorgestellt und hierbei auf die wichtigsten Operationen wie das Skalar- oder das Vektorprodukt eingegangen. Dieser Abschnitt wird mit einer kurzen Zusammenfassung der Begriffe Gradient, Divergenz und Rotation aus der Vektoranalysis abgeschlossen, die im Rah men der Elektrizitätslehre noch einmal kurz aufgegriffen werden.
46 | 2 Mathematische Methoden
Aufgaben Aufg. 2.1: Lösen Sie die folgenden linearen Gleichungen nach x auf: a) 12 = 5x + 2 b) 35 = 4(x + 5) − 5 Aufg. 2.2: Berechnen Sie beide Lösungen der folgenden quadratischen Gleichungen: a) 11x2 = 99 b) (x + 5)2 − 25 = 0 c) 2x2 + 40x = −150 Aufg. 2.3: Eine Leiter der Länge 2 m wurde mit einem Winkel von 30° zwischen Leiter und Wand aufgestellt. Berechnen Sie . . . a) die Höhe zwischen Boden und der Spitze der Leiter. b) den Abstand zwischen Wand und dem Leitersockel. Aufg. 2.4: Bestimmen Sie die Steigung der folgenden Funktionen an der Stelle x = 3: a) f(x) = 1/x3 + e2x b) f(x) = sin(2x2 + 5x) c) f(x) = x2 ln(x) Aufg. 2.5: Berechnen Sie die folgenden Integrale mit den Grenzen 1 und 2: a) ∫ x2 dx b) ∫ 1/x dx c) ∫ e2x dx d) ∫ x ln x dx Aufg. 2.6: Wie groß ist der eingeschlossene Winkel zwischen den beiden Vektoren (5, 3, 6) und (6, 9, 3)? Aufg. 2.7: Berechnen Sie die Komponenten eines Vektors, der senkrecht auf den Vek toren (1, 2, 0) und (3, 0, 1) stehen soll. Aufg. 2.8: Berechnen Sie den Gradienten der Funktion: f(x, y, z) = x2 + 5y + z ⃗ y, z) = (4x, y3 , z) Aufg. 2.9: Berechnen Sie die Divergenz des Vektorfeldes: v(x, ⃗ y, z) = (2y, x2 , 0) Aufg. 2.10: Berechnen Sie die Rotation des Vektorfeldes: v(x,
3 Mechanik 3.1 Übersicht Dieses Kapitel enthält die wichtigsten Zusammenhänge und zugehörigen Formeln der klassischen Mechanik. Zunächst erfolgt eine Einführung in die Kinematik, in der an hand idealisierter Körper zentrale Begriffe wie Geschwindigkeit und Beschleunigung definiert und an Beispielen von Wurfparabeln genauer erläutert werden. Anschlie ßend wird auf die Dynamik eingegangen, die sich mit der Ursache von Bewegungen beschäftigt und die Kernbegriffe Kraft und Impuls beinhaltet, wobei ebenfalls auf eine genaue Unterscheidung zwischen Kräften und Scheinkräften hingewiesen wird. Au ßerdem wird bei der Behandlung ausführlich auf den Begriff der Energie und deren Erhaltung eingegangen. Anschließend werden Themen wie Drehmoment und Dreh impuls am Beispiel starrer Körper erläutert. Außerdem werden die Eigenschaften rea ler Körper eingeführt. Das Kapitel endet mit einem Überblick über die Himmelsme chanik, in der die zuvor dargestellten Methoden zum Einsatz kommen.
3.2 Kinematik Die Kinematik beschäftigt sich mit der Beschreibung von Bewegungen, ohne deren Ursache zu berücksichtigen. Die betrachteten Körper werden als Massepunkte behan delt, d. h., sie besitzen keine Ausdehnung und bewegen sich daher ohne Reibung und Luftwiderstand. Die Bewegung von Objekten im Raum wird auch Translation genannt.
3.2.1 Geschwindigkeit Die Geschwindigkeit eines Körpers ist definiert über die Änderung seines Ortes inner halb eines verstrichenen Zeitintervalls. Wenn er sich zu einem Zeitpunkt t1 an dem Ort s1 befindet und zu einem anderen Zeitpunkt t2 am Ort s2 , dann lässt sich seine Geschwindigkeit v (von engl. velocity) wie folgt berechnen: v=
s2 − s1 ∆s = t2 − t1 ∆t
(3.1)
Es ist zu beachten, dass Gleichung (3.1) nur dann angewendet wird, wenn der Körper sich in dem betrachteten Zeitintervall mit einer konstanten Geschwindigkeit bewegt, d. h. eine geradlinige und gleichförmige Bewegung vorliegt. Ändert sich sei ne Geschwindigkeit zu jedem Zeitpunkt t, dann beschreibt die Gleichung (3.1) seine Durchschnittsgeschwindigkeit, die in der Regel mit v̄ bezeichnet wird. In diesem Fall spricht man von einer beschleunigten Bewegung. https://doi.org/10.1515/9783110692921-003
48 | 3 Mechanik
Experiment: Messung von Geschwindigkeiten Die Geschwindigkeit kann mit einem Luftkissengleiter gemessen werden, der reibungsfrei auf ei ner Schiene fährt, nachdem er zuvor angestoßen wurde. Mithilfe zweier Lichtschranken wird die verstrichene Zeit für verschiedene Abstände gemessen. Der als Geschwindigkeit definierte Quo tient aus beiden Größen stellt sich dabei als konstant heraus.
Um die Momentangeschwindigkeit eines beschleunigten Körpers zu erhalten, muss das Zeitintervall beliebig klein gewählt werden. Dies entspricht mathematisch der Ableitung nach der Zeit: ∆s ds = = ṡ ∆t→0 ∆t dt
v = lim
(3.2)
Um die Geschwindigkeit analytisch zu berechnen, muss der Weg als Funktion der Zeit gegeben sein. Die Einheit der Geschwindigkeit ergibt sich aus dem Quotienten von Strecke und Zeit und ist mit Meter pro Sekunde (m/s) eine Kombination aus SI-Einhei ten. Eine sehr populäre Einheit ist außerdem Kilometer pro Stunde (km/h), die bei spielsweise im Straßenverkehr und bei der Messung der Windgeschwindigkeit benutzt wird. Der Zusammenhang zwischen diesen beiden Einheiten lautet wie folgt: 1 km/h =
m/s 1.000 m 1.000 m = = 1h 3.600 s 3,6
Um die Einheit km/h zu erhalten, muss folglich der Wert in m/s mit dem Faktor 3,6 multipliziert werden, d. h., es gilt: v[
km m ] = 3,6 ⋅ v [ ] h s
(3.3)
Im Allgemeinen bewegt sich ein Körper nicht entlang einer Achse, sondern auf krummlinigen Bahnen im dreidimensionalen Raum. Anstelle des Ortes x wird dann der Ortsvektor r ⃗ = (x, y, z) verwendet werden, der alle drei Koordinaten beinhaltet. In diesem Fall muss auch die Geschwindigkeit wie eine vektorielle Größe behandelt werden: dx dt dr ⃗ ( dy ) (3.4) =( ) v⃗ = dt dt dz ( dt ) Jede Vektorkomponente des Ortsvektors r ⃗ muss hierbei unabhängig von den anderen beiden Komponenten nach der Zeit t abgeleitet werden. Als Ergebnis erhält man dann den Geschwindigkeitsvektor v.⃗
3.2 Kinematik |
49
3.2.2 Beschleunigung Die Beschleunigung eines Körpers ist definiert als Änderung seiner Geschwindigkeit pro Zeitintervall. Analog zur Definition der Geschwindigkeit ergibt sich somit für die durchschnittliche Beschleunigung beziehungsweise die Beschleunigung a (von engl. acceleration) einer gleichförmig beschleunigten Bewegung a=
v2 − v1 ∆v = t2 − t1 ∆t
(3.5)
und die momentane Beschleunigung bei ungleichförmig beschleunigten Bewegungen ∆v dv = = v̇ ∆t→0 ∆t dt
a = lim
(3.6)
Die Einheit der Beschleunigung ist m/s2 und kann folgendermaßen veranschaulicht werden: Bei einer beschleunigten Bewegung ändert die Geschwindigkeit eines Kör pers ihren Wert pro verstrichener Zeit. Eine Beschleunigung von 1 m/s2 bedeutet dann, dass die Geschwindigkeit jede Sekunde um 1 m/s zunimmt. Die Beschleunigung kann ebenfalls ein Minus als Vorzeichen besitzen. In diesem Fall spricht man von einer ne gativen Beschleunigung beziehungsweise einer Abbremsung, da sich die Geschwin digkeit verringert. Auch die Beschleunigung ist eine vektorielle Größe mit Betrag und Richtung. Für die Bewegung im dreidimensionalen Raum gilt dementsprechend: dv x dt dv⃗ ( dv y ) a⃗ = =( ) dt dt dv z ( dt )
(3.7)
Die drei Geschwindigkeitskomponenten werden hier und im Folgenden mit v x , v y und v z bezeichnet. Setzt man Gleichung (3.4) in diese Beziehung ein, dann ergibt sich: dv⃗ d2 r ⃗ (3.8) = 2 a⃗ = dt dt Die Beschleunigung ist daher identisch mit der zweiten Ableitung der Strecke bezie hungsweise des Ortsvektors nach der Zeit.
3.2.3 Allgemeines Weg-Zeit-Gesetz Zur Berechnung der Momentangeschwindigkeit aus einer gegebenen Beschleunigung muss die Differenzierung umgekehrt und über die Beschleunigung integriert werden.
50 | 3 Mechanik
Experiment: Messung von Beschleunigungen Ein Gleiter auf einer Luftkissenbahn wird über einen Faden, der über eine Umlenkrolle läuft, mit verschiedenen Gewichten verbunden, die aufgrund der Erdanziehung beschleunigt werden. Die Position des Gleiters kann zu verschiedenen Zeitpunkten mithilfe von Lichtschranken gemessen werden. Überträgt man die gemessenen Werte in ein Weg-Zeit-Diagramm, dann ergibt sich ein qua dratischer Zusammenhang zwischen Strecke und Zeit.
s
v
a
s const t s
t v
t a
v const t s
t v
t a
a const t
t
t
Abb. 3.1: Alle wichtigen Diagramme in der Kinematik für Strecke, Geschwindigkeit und Beschleuni gung als Funktion der Zeit.
Für die Geschwindigkeit ergibt sich dann im Falle einer gleichförmig beschleunigten Bewegung (a⃗ = const) das unbestimmte Integral: v⃗ = ∫ a⃗ dt = at⃗ + v⃗ 0
(3.9)
Die Integrationskonstante ist dann gleichzusetzen mit der Anfangsgeschwindig keit des beschleunigten Körpers. Um aus der Geschwindigkeit die momentane Posi tion zu erhalten, muss eine weitere Integration nach der Zeit durchgeführt werden. Dies führt unter Berücksichtigung der Integrationsregeln schließlich zum allgemei nen Weg-Zeit-Gesetz für gleichförmig beschleunigte Körper: ⃗ = r(t)
1 2 at⃗ + v⃗0 t + r0⃗ 2
(3.10)
Durch die weitere Integration ergibt sich eine neue Integrationskonstante r0⃗ , die nun als Anfangsposition des Körpers relativ zum Koordinatenursprung interpretiert wird. Besonders hervorzuheben ist der quadratische Zusammenhang zwischen Strecke s und Zeit t. Je nachdem, ob die Beschleunigung konstant ist (a = const), die Geschwin digkeit (v = const) oder der Ort (s = const), sehen die zeitlichen Funktionen für a,
3.2 Kinematik |
51
v und s unterschiedlich aus. Alle 9 möglichen Kombinationen sind in Abbildung 3.1 dargestellt. Das allgemeine Weg-Zeit-Gesetz findet zum Beispiel in der Navigations software von Handys eine wichtige Anwendung. Fällt das GPS-Signal beispielsweise während einer Tunnelfahrt aus, so kann die Software dies mithilfe der in den moder nen Smartphones eingebauten Beschleunigungssensoren kurzfristig kompensieren.
3.2.4 Würfe 3.2.4.1 Senkrechter Wurf Die bisher aufgestellten Größen und Formeln sollen nun am Beispiel von Würfen ver deutlicht werden. Alle Körper, die sich im Erdschwerefeld nahe der Erdoberfläche be finden, unterliegen im freien Fall derselben Beschleunigung a = −g, die zum Erdmit telpunkt hin gerichtet ist. Die Größe g (von engl. gravity) wird daher auch als Erdbe schleunigung bezeichnet. Das Minuszeichen vor dem g trägt der Tatsache Rechnung, dass die Beschleunigung von einem auf der Erde stehenden Beobachter aus nach un ten gerichtet ist. Es ist zu berücksichtigen, dass die Erdbeschleunigung an verschiedenen Orten auf der Erde unterschiedlich groß ist. Allerdings betragen die Abweichungen zwi schen den Polen und dem Äquator lediglich ein paar Prozent. In Mitteleuropa kann der Wert g = 9,81 m/s2 beziehungsweise g ≈ 10 m/s2 als gute Näherung verwen det werden. Für sehr große Abstände zur Erdoberfläche muss statt dieser Näherung das Newton’sche Gravitationsgesetz zur Berechnung der Beschleunigung verwendet werden, das im Abschnitt 3.12.1 genauer erläutert werden wird. Ein freier Fall liegt vor, wenn ein Gegenstand aus einer bestimmten Höhe h frei nach unten fällt und zu Beginn keine Anfangsgeschwindigkeit v0 besitzt. Aus dem allgemeinen Weg-Zeit-Gesetz folgt dann für die zurückgelegte Strecke in y-Richtung: 1 y(t) = − gt2 + h 2
(3.11)
Aus dieser Gleichung lässt sich die Fallzeit direkt ausrechnen. Der Erdboden wird er reicht, wenn y(t) = 0 wird. Daraus ergibt sich die Gleichung: 1 y(t) = 0 ⇔ − gt2 + h = 0 , 2
(3.12)
die nach t umgestellt die Fallzeit tF ergibt: tF = √
2h g
(3.13)
Da negative Zeiten physikalisch nicht sinnvoll sind, wird lediglich die positive Lösung der quadratischen Gleichung betrachtet.
52 | 3 Mechanik
Man spricht von einem senkrechten Wurf, wenn ein Körper senkrecht nach oben geworfen wird und im Moment des Abwurfs eine definierte Anfangsgeschwindig keit v0 hat. Wird er aus der Höhe h abgeworfen, dann kann seine Bewegung in y-Rich tung mithilfe des allgemeinen Weg-Zeit-Gesetzes wie folgt beschrieben werden: 1 y(t) = − gt2 + v0 t + h 2
(3.14)
Der Körper wird nach dem Abwurf durch die Erdbeschleunigung abgebremst und er reicht eine maximale Höhe, bevor er wieder nach unten fällt. Er erreicht den Erdbo den, wenn die Bedingung y(t) = 0 erfüllt ist, d. h., es gilt: 1 y(t) = 0 ⇔ − gt2 + v0 t + h = 0 2
(3.15)
Diese quadratische Gleichung kann mithilfe der pq-Formel gelöst werden. Damit er hält man als Formel für die gesamte Flugzeit:
tF =
v0 √ v20 2h + + g g g2
(3.16)
Der höchste Punkt, an dem sich die Bewegung umkehrt, kann auf ähnliche Weise be stimmt werden. Dazu muss die Ausgangsgleichung (3.14) nach t abgeleitet werden, um die Geschwindigkeit als Funktion der Zeit zu erhalten: v(t) = gt + v0
(3.17)
Der höchste Punkt ist erreicht, wenn v(t) = 0 wird, sodass sich die Flugzeit bis zum Erreichen des höchsten Punktes durch die Umstellung nach t berechnen lässt: tH =
v0 g
(3.18)
Setzt man tH wieder in y(t) ein, dann erhält man für die maximale Höhe: yH = −
1 v20 v20 + +h 2 g g
(3.19)
3.2.4.2 Waagerechter Wurf Bei einem waagerechten Wurf wird der Körper parallel zum Erdboden geworfen. Die Bewegungen eines Körpers in vertikaler und horizontaler Richtung im Erdschwere feld können unabhängig voneinander betrachtet werden. Der waagerechte Wurf eines Körpers zeichnet sich dadurch aus, dass der Körper eine zeitunabhängige Geschwin digkeit v0,x in horizontaler x-Richtung besitzt. In der vertikalen y-Richtung erfährt er
3.2 Kinematik | 53
vx (t 1 ) = v0,x vx (t 2 ) = v0,x φ
g h
g vy (t 2 )
y
v(t 2 )
x
Abb. 3.2: Beispiel für einen waagerechten Wurf einer Kugel im Abstand h über dem Erd boden und mit der Anfangsgeschwindigkeit v 0,x . Die Position der Kugel wurde für drei ver schiedene Zeitpunkte eingezeichnet.
eine konstante Beschleunigung g senkrecht zum Erdboden, d. h., die Geschwindigkeit v y (t) startet bei 0 m/s und nimmt im Laufe der Zeit kontinuierlich mit v y (t) = gt zu. Die Bewegung des Körpers mit allen relevanten Größen ist in Abbildung 3.2 skiz ziert. Die Bewegungsgleichungen des Körpers, der in der Höhe h in positiver x-Rich tung abgeworfen wird, lassen sich mithilfe des allgemeinen Weg-Zeit-Gesetzes aus Gleichung (3.10) in der folgenden Form aufschreiben: x(t) = v0,x t 1 y(t) = − gt2 + h 2
(3.20) (3.21)
Um die Darstellung zu vereinfachen, kann man die obere Gleichung nach t umstel len und anschließend in die untere Gleichung einsetzen. Die sich daraus ergebende Funktion beschreibt dann den rechten Ast einer Parabel: y(x) = h −
1 x2 g 2 v20,x
(3.22)
Aus Abbildung 3.2 lässt sich ablesen, dass der Betrag der Bahngeschwindigkeit v(t) mithilfe des Satzes des Pythagoras zu jedem Zeitpunkt t wie folgt angegeben wer den kann: ⃗ |v(t)| = √v20,x + g2 t2 (3.23) Außerdem kann der Winkel zwischen dem Geschwindigkeitsvektor und der Horizon talen mithilfe der folgenden Formel berechnet werden: tan φ =
v y (t) v x (t)
(3.24)
Dies ergibt nach dem Ersetzen von v y und v y : tan φ =
gt v0,x
(3.25)
54 | 3 Mechanik
Mittels der o. g. Gleichungen lässt sich ein waagerechter Wurf im Erdschwerefeld unter Vernachlässigung des Luftwiderstandes vollständig beschreiben.
Experiment: Fliegende Kugeln Der waagerechte Wurf kann mithilfe zweier Kugeln verdeutlicht werden. Eine der Kugeln wird aus einer bestimmten Höhe fallen gelassen, während die zweite Kugel aus der gleichen Höhe und zum gleichen Zeitpunkt waagerecht geworfen beziehungsweise gestoßen wird. Da beide Kugeln gleich zeitig auf dem Boden auftreffen, beeinflussen sich die Bewegungen in horizontaler und vertikaler Richtung nicht.
3.2.4.3 Schiefer Wurf Der schiefe Wurf beschreibt den allgemeinen Fall der Bewegung eines Körpers im Schwerefeld der Erde und beinhaltet den waagerechten und senkrechten Wurf als Spe zialfall. Der Körper wird beim schiefen Wurf unter einem Winkel α zur Erdoberfläche aus einer bestimmten Höhe h mit der Anfangsgeschwindigkeit v0 abgeworfen. In Ab bildung 3.3 ist der schiefe Wurf für drei verschiedene Abwurfwinkel dargestellt. Aus der Skizze lassen sich alle relevanten Größen für die folgenden Berechnungen able sen. Zunächst kann der Geschwindigkeitsvektor v⃗ 0 in die x- und y-Komponente mithil fe der trigonometrischen Funktionen aufgeteilt werden. d. h., man führt die folgenden Ersetzungen durch: v0,x = v0 cos φ
(3.26)
v0,y = v0 sin φ
(3.27)
Weiterhin gelten die gleichen Voraussetzungen wie beim waagerechten Wurf: Die Ge schwindigkeitskomponente v0,x in x-Richtung bleibt konstant, während die Kompo nente v0,y in y-Richtung zu jedem Zeitpunkt größer wird, da der Körper in diese Rich tung beschleunigt wird. Die Bewegungsgleichungen ergeben sich dann wie folgt: x(t) = v0 cos φ t 1 y(t) = − gt2 + v0 sin φ t + h 2
(3.28) (3.29)
Eliminiert man wieder die Zeit in der zweiten Gleichung durch Umformen der ersten Gleichung, dann ergibt sich der folgende quadratische Zusammenhang: 1 x2 y(x) = − g 2 + x tan φ + h 2 v0 cos2 φ
(3.30)
3.2 Kinematik |
55
v0,y v0 v0,x φ h
xH xW Abb. 3.3: Beispielkurven für einen schiefen Wurf aus der Höhe h mit drei verschiedenen Abwurfwin keln. Die durchgezogene Kurve stellt einen Wurf unter φ = 45° dar, die gestrichelte Kurve einen Wurf unter φ = 10° und die gepunktete Kurve einen Wurf unter φ = 80°.
Hierbei wurde die Beziehung tan φ = sin φ/ cos φ ausgenutzt. Aufgrund des quadra tischen Zusammenhangs zwischen Wurfweite x und -höhe y bezeichnet man die sich ergebende Kurve als Wurfparabel. Die maximale Wurfweite und -höhe lässt sich im Prinzip aus dieser hergeleiteten Beziehung ableiten. Aufgrund der Komplexität der einzelnen Summanden empfiehlt es sich allerdings, das zu Beginn aufgestellte Gleichungssystem dafür zu verwenden. Zur Bestimmung der maximalen Wurfweite setzt man erneut y(t) gleich 0: 1 y(t) = 0 ⇔ − gt2 + v0 sin φ t + h = 0 2
(3.31)
Diese Gleichung lässt sich nun beispielsweise mithilfe der pq-Formel lösen. Als Ergeb nis erhält man die Zeit t W , die bis zum Erreichen der maximalen Wurfweite vergeht:
tW =
√sin2 φ v20 + 2h + v0 sin φ g
(3.32)
Die Wurfweite ergibt sich dann durch Einsetzen in x(t). Analog dazu kann auch die maximale Höhe ausgerechnet werden. Dies ist er reicht, wenn die Geschwindigkeit in y-Richtung den Wert 0 erreicht. Mathematisch ausgedrückt muss dazu die Ableitung der Funktion y(t) nach der Zeit verschwinden, d. h., es muss gelten: y (t) = 0 ⇔ −gt + v0 sin φ = 0 (3.33)
56 | 3 Mechanik
Da es sich um eine lineare Gleichung handelt, ergibt sich für die Zeit tH , nach der die maximale Höhe erreicht ist: tH =
v0 sin φ g
(3.34)
Setzt man die Zeit in die Funktion x(t) ein, dann erhält man die Strecke, nach welcher die maximale Wurfhöhe erreicht wird: xH =
v20 sin φ cos φ g
(3.35)
Analog kann die Zeit auch in die Funktion y(t) eingesetzt werden, um damit die ma ximale Höhe zu berechnen:
yH =
v20 sin2 φ +h 2g
(3.36)
Experiment: Wasserparabel Eine einfache und eindrucksvolle Möglichkeit, den schiefen Wurf experimentell zu verdeutlichen, ist die Verwendung eines Schlauches, der an eine Wasserpumpe oder ein höher gelegenes, mit Wasser gefülltes Gefäß angeschlossen wird. Wenn das Ende des Schlauches, aus dem das Was ser mit genügend Druck austritt, schräg nach oben geneigt wird, kann die dadurch entstehende Wurfparabel zu jedem Zeitpunkt sichtbar gemacht werden (s. Abbildung 3.4).
Abb. 3.4: Beispiel einer Wasserparabel aus einem Wasserschlauch.
3.3 Dynamik | 57
Experiment: Abschuss eines Stofftiers Für ein weiteres Experiment werden eine Armbrust und ein Stofftier benötigt, das in einer bestimm ten Höhe mit einem Elektromagneten befestigt wird. Die Armbrust wird vor dem Abschuss direkt auf das Stofftier gerichtet. Der Magnet wird abgeschaltet, sobald der Abzug der Armbrust ausge löst wurde, woraufhin das Tier zu Boden fällt. Während des Falls wird es allerdings von dem Pfeil getroffen. Die Erklärung hierfür ist, dass sowohl das Tier als auch der Pfeil der Erdbeschleunigung ausgesetzt sind und dadurch die vertikalen Bewegungen des Tieres und des Pfeils gleich stark beeinflusst werden.
3.3 Dynamik Im Gegensatz zur Kinematik beschäftigt sich die Dynamik nicht nur mit der Bewegung eines Körpers, sondern betrachtet ebenfalls die Ursache dieser Bewegung. In der klas sischen Mechanik werden Bewegungsänderungen immer durch Kräfte hervorgerufen. Diese Kräfte können sowohl direkt auf einen Körper einwirken oder über eine Fernwir kung wie bei der Gravitation beziehungsweise Elektrostatik.
3.3.1 Die Newton’schen Axiome Im Werk Philosophiae Naturalis Principia Mathematica des Naturforschers Isaac New ton sind die nach ihm benannten drei Axiome aufgelistet, welche als Grundgesetze der Mechanik angesehen werden. Diese können wie folgt zusammengefasst werden: 1. Ein Körper, auf den keine Kräfte wirken, bewegt sich mit konstanter Geschwin digkeit. Insbesondere gilt also: Wenn der Körper ruht, verharrt er unverändert in seiner Position. Dies lässt sich mathematisch wie folgt formulieren: {v⃗ = 0 F⃗ = 0 ⇒ { v⃗ = const { 2.
Eine Kraft F⃗ auf einen Körper der Masse m bewirkt eine Beschleunigung a⃗ mit dem linearen Zusammenhang: F⃗ = m a⃗
3.
(3.37)
(3.38)
Wenn ein Körper 1 eine Kraft F1→2 auf einen Körper 2 ausübt, dann wirkt auf den Körper 1 die gleich große – aber entgegengesetzt gerichtete – Gegenkraft F⃗ 2→1 . Es gilt daher: F⃗ 1→2 = −F⃗ 2→1
(3.39)
58 | 3 Mechanik
Diese Beziehung wird daher auch als Prinzip actio = reactio oder Kraft = Gegenkraft bezeichnet. Diese von Newton gefundenen Naturgesetze werden Axiome genannt, weil sie nicht aus einer anderen Theorie abgeleitet werden. Beim ersten Newton’schen Axiom ist zu beachten, dass dieses der eigenen Intuiti on zunächst zu widersprechen scheint, da nahezu alle sich bewegenden Alltagsgegen stände im Laufe der Zeit langsamer werden, sofern sie nicht permanent angetrieben werden. Dies lässt sich allerdings mit der Anwesenheit von Reibung erklären, die als zusätzliche Kraft alle Körper abbremst. Die in diesem Kapitel neu eingeführte Größe der Kraft kann mit der Gleichung (3.38) über das zweite Newton’sche Axiom definiert werden. Ersetzt man die Beschleunigung a durch die Erdbeschleunigung g, dann wird deutlich, dass g neben der Einheit m/s2 ebenfalls die Einheit N/kg besitzen muss, damit Gleichung (3.38) erfüllt ist. Man bezeichnet g deshalb auch als Ortsfaktor, da er als Umrechnungsgröße zwischen Gewichtskraft (Schwere) und Masse dient. Umgangs sprachlich hat sich allerdings der Begriff Gewicht als Synonym für die Masse durch gesetzt.
Experiment: Trägheitsprinzip Um das zweite Newton’sche Axiom zu demonstrieren, wird eine schwere Kugel an einer Schnur aufgehängt. Am unteren Ende der Kugel befindet sich eine weitere Schnur. Zieht man langsam daran, dann reißt die obere Schnur und die Kugel fällt nach unten. Wenn man hingegen schnell an der unteren Schnur zieht, dann reißt diese ab und die Kugel bewegt sich nicht, da die Kraft aufgrund ihrer Trägheit nicht auf die Kugel übertragen werden konnte.
Experiment: Kraft und Gegenkraft Das dritte Newton’sche Axiom kann mithilfe zweier Rollbretter (Skateboards) veranschaulicht wer den. Auf beiden Rollbrettern stehen je eine Person, wobei beide Personen je ein Ende eines Seils in den Händen halten. Wenn eine Person an dem Seil zieht, bewegen sich dennoch beide Personen aufeinander zu.
3.3.2 Superpositionsprinzip Alle Arten von physikalischen Größen, die über eine Richtung und einen Betrag de finiert sind, lassen sich vektoriell addieren. Beispiele seien hier die Geschwindigkeit, Beschleunigung oder Kraft. Man spricht in diesem Zusammenhang vom sog. Super positionsprinzip. Wenn beispielsweise zwei gleich große Kräfte einen Ballon in entge gengesetzte Richtungen ziehen, dann verformt sich dieser zwar, bleibt aber dennoch in Ruhe, da sich die Kräfte bei der Addition vollständig kompensieren. Man kann die Vektoren sowohl zeichnerisch als auch rechnerisch addieren, wenn die Längen und
3.3 Dynamik |
59
Richtungen bekannt sind. Im Falle der schiefen Ebene kann beispielsweise die Ge wichtskraft F⃗ G , die auf einen Körper wirkt, in eine Hangabtriebskraft F⃗ H und eine Normalkraft F⃗ N aufgeteilt werden. Während die Hangabtriebskraft immer parallel zur Oberfläche der schiefen Ebene verläuft, steht die Normalkraft senkrecht zu dieser. Ab bildung 3.5 illustriert diesen Zusammenhang für einen beliebigen Körper, der sich auf einer schiefen Ebene befindet. Mit dem Kräfteparallelogramm lässt sich für den Betrag der Hangabtriebskraft FH = FG sin θ
(3.40)
und für die Normalkraft entsprechend FN = FG cos θ
(3.41)
ableiten. Unterliegt der Körper keiner weiteren Zwangskraft, dann wird er durch die Hangabtriebskraft beschleunigt. Für die Beschleunigung gilt dann: a = g sin α
(3.42)
Die Beschleunigung aufgrund der Gewichtskraft ist hierbei um den Faktor sin α klei ner. Die auf die schiefe Ebene wirkende Normalkraft muss von dieser kompensiert werden. Experiment: Addition von Geschwindigkeiten Die vektorielle Addition von Geschwindigkeiten lässt sich mithilfe zweier Kugeln demonstrieren, die auf unterschiedlichen Wagen rollen. Eine der beiden Tischplatten ist beweglich und kann so wohl senkrecht als auch parallel zur Bahn der Kugel verschoben werden. Bei paralleler Verschie bung erreicht die Kugel früher das Ziel, da sich die Geschwindigkeiten von Kugel und Platte addie ren (s. Abbildung 3.6). Bei senkrechter Verschiebung wird die Kugel zwar abgelenkt, erreicht das Ziel aber dennoch gleichzeitig mit der anderen Kugel.
FH
θ
θ FN FG
Abb. 3.5: Zerlegung der Gewichtskraft F G⃗ in die Hangabtriebs kraft F ⃗H und Normalkraft F N⃗ für einen Körper, der sich auf einer schiefen Ebene befindet.
60 | 3 Mechanik
3.4 Impuls Beim Stoß zweier Körper 1 und 2 muss Gleichung (3.39) zu jedem beliebigen Zeitpunkt t erfüllt sein. Uns interessieren allerdings jetzt lediglich die Anfangs- und Endzustände. Die Abläufe, die während des Stoßvorgangs ablaufen, sollen daher in der folgenden Betrachtung keine Rolle spielen. Vielmehr sind für die weiteren Berechnungen ledig lich die Anfangsgeschwindigkeiten v1 und v2 beziehungsweise die Endgeschwindig keiten v1 und v2 der beiden Körper interessant. Diese können unter Zuhilfenahme von Gleichung (3.38) berechnet werden. Einsetzen in Gleichung (3.39) liefert mit anschließender Integration beider Seiten über das gesamte Zeitintervall von t1 bis t2 : t2
t2
m1 ∫ a⃗ 1 dt = m2 ∫ a⃗ 2 dt t1
t1
Nutzt man den zuvor betrachteten Zusammenhang zwischen Geschwindigkeit und Be schleunigung aus, dann ergibt sich: m1 v⃗ 1 − m1 v⃗1 = m2 v⃗2 − m2 v⃗ 2 Das Umformen dieser Gleichung führt schließlich zu der folgenden Form: m1 v⃗ 1 + m2 v⃗2 = m1 v⃗1 + m2 v⃗ 2 Die Größe p⃗ = m v⃗
(3.43)
wird Impuls genannt. Mit dieser Definition kann die zuvor aufgestellte Gleichung wie folgt geschrieben werden: p⃗ 1 + p⃗ 2 = p⃗ 1 + p⃗ 2
vW
vK
vK t
vK
(vK + vW )t
Abb. 3.6: Eine Kugel bewegt sich auf einem ruhenden Wagen (links) und auf einem Wagen, der sich selbst mit einer bestimmten Geschwindigkeit bewegt (rechts). In diesem Fall ist die Gesamt geschwindigkeit der Kugel gleich der Summe beider Einzelgeschwindigkeiten und der zurückgelegte Weg der Kugel gegenüber dem Boden deutlich größer.
3.5 Energie & Arbeit |
61
Die Gleichung in der jetzigen Form sagt aus, dass der Gesamtimpuls in einem abge schlossenen System stets erhalten sein muss. Das bedeutet, dass die Summe der Im pulse vor einem bestimmten Zeitpunkt (z. B. einem Stoßprozess) gleich der Summe der Impulse nach diesem Zeitpunkt sein muss. Natürlich gilt dieser Zusammenhang nicht nur für 2 Massepunkte, sondern kann ohne Probleme auf Systeme mehrerer Mas sepunkte übertragen werden. Für ein System mit allgemein N Massepunkten gilt dann entsprechend: N
N
i=1
i=1
∑ p⃗ i = ∑ p⃗ i
(3.44)
Die Kraft, die auf einen Körper wirkt, ist gleichzusetzen mit der zeitlichen Ände rung seines Impulses. Damit ergibt sich die folgende Beziehung zwischen Kraft und Impuls: dp⃗ dv⃗ dm F⃗ = =m + v⃗ (3.45) dt dt dt Im letzten Schritt wurde die Produktregel der Differenzialrechnung angewendet. Wenn die Masse sich zeitlich nicht ändert, dann fällt der letzte Term weg, und übrig bleibt mit dv⃗ F⃗ = m = m a⃗ (3.46) dt das bereits beschriebene zweite Newton’sche Axiom. Experiment: Wasserrakete Ein Versuch zur Darstellung der Impulserhaltung ist die sog. Wasserrakete. Diese wird zu etwa einem Drittel mit Wasser befüllt und auf einer Startrampe platziert. Anschließend wird mit einer Handpumpe Druckluft in den Bauch der Rakete gepumpt. Nach dem Öffnen es Ventils wird das Wasser an der Unterseite der Rakete herausgedrückt und die Rakete fliegt aufgrund der Impulser haltung in die entgegengesetzte Richtung weg.
3.5 Energie & Arbeit 3.5.1 Definition Energie ist eine weitere fundamentale Größe in der Mechanik. Sie kann als die Fähig keit eines Systems angesehen werden, Arbeit zu verrichten, was zur Umwandlung ver schiedener Energieformen ineinander führt. Die Energie ist allgemein definiert als das Skalarprodukt von Kraft- und Wegvektor, da lediglich die Kraftkomponente in Rich tung des zurückgelegten Weges einen Einfluss auf die Energie eines Systems hat. Falls die Kraft nicht konstant ist, sondern als Funktion des zurückgelegten Weges angege ben wird, muss über diese Funktion integriert werden. Die allgemeine Definition der
62 | 3 Mechanik
Energie und der Arbeit lautet demzufolge wie folgt: s2
E = ∫ F⃗ ⋅ ds⃗
(3.47)
s1
Im Folgenden sollen zwei wichtige Energieformen der Mechanik genauer untersucht werden.
3.5.2 Potenzielle Energie Die potenzielle Energie, auch Lageenergie genannt, eines Körpers ergibt sich aus sei ner Bewegung im Schwerefeld der Erde. Wenn ein Körper von einer Höhe h1 auf eine Höhe h2 angehoben wird, dann muss für diesen Vorgang Arbeit verrichtet werden. Diese Arbeit steht anschließend als potenzielle Energie zur Verfügung und kann mit Gleichung (3.47) wie folgt definiert werden: s2
Epot
s1
ds
s2
= − ∫ F⃗ ⋅ ds⃗ = ∫ F cos θ ds
(3.48)
s1
dh
θ θ
h Fs
FG
Abb. 3.7: Zur Herleitung der Formel für die potenzielle Energie im Schwerefeld der Erde.
Aus Abbildung 3.7 entnimmt man den Zusammenhang zwischen dem infinitesimalen Höhenunterschied dh und der Wegstrecke ds zu ds = dh/ cos θ. Einsetzen und Inte grieren liefern dann für die Formel der potenziellen Energie: Epot = mgh
(3.49)
Bemerkenswert ist, dass sie lediglich von der Masse des Körpers (genauer: der Ge wichtskraft) und der Höhendifferenz h = h2 − h1 abhängt. Diese Energieform wird daher auch Lageenergie genannt. Der exakte Weg, auf dem der Körper in diese Höhe transportiert wurde, fällt aus der Betrachtung vollständig heraus, d. h., nur h spielt eine Rolle.
3.5 Energie & Arbeit | 63
3.5.3 Kinetische Energie Aus der allgemeinen Definition der Energie in Gleichung (3.47) ergibt sich zusammen mit Gleichung (3.38) für die kinetische Energie beziehungsweise Bewegungsenergie ei nes Körpers: s2
E = ∫ m a⃗ ⋅ ds⃗
(3.50)
s1
Die Masse des Körpers soll sich dabei nicht ändern, sodass sie als Konstante vor das Integral gezogen werden kann. Die Beschleunigung kann nun durch die Ableitung der Geschwindigkeit nach der Zeit ersetzt werden: s2
dv⃗ ⋅ d s⃗ dt
E = m∫ s1
(3.51)
Die Behandlung des Differenzialquotienten als Bruch liefert mit dem Zusammenhang ⃗ v⃗ = ds/dt: v2
E = m ∫ v⃗ ⋅ dv⃗
(3.52)
v1
Aus mathematischer Sicht wurde hier eine Variablensubstitution durchgeführt. Das Ausmultiplizieren des Skalarproduktes und die anschließende Integration ergeben schließlich die Definition der kinetischen Energie: Ekin =
1 2 mv 2
(3.53)
In diesem Schritt wurde die untere Grenze zu 0 und die obere Grenze als v gesetzt. Diese Energieform hängt lediglich von der Masse m und dem Betrag der erreichten Endgeschwindigkeit v des Körpers ab. Die genaue Abhängigkeit der Beschleunigung von der Zeit spielt für das Ergebnis keine Rolle.
3.5.4 Energieerhaltung Genau wie der Impuls ist auch die Energie eine Erhaltungsgröße. Diese Tatsache lässt sich ebensowenig beweisen wie die Newton’schen Axiome, entspricht aber unserer alltäglichen Erfahrung. Energieerhaltung bedeutet, dass die Summe aller vorkom menden Energieformen in einem abgeschlossenen System konstant sein muss und sich zeitlich nicht ändern darf. Allerdings können sich verschiedene Energieformen ineinander umwandeln. Dies kann man am Beispiel eines fallenden Körpers oder einer schiefen Ebene besonders gut deutlich machen. Wenn sich der Körper zunächst
64 | 3 Mechanik
in der Höhe h über einem bestimmten Punkt befand und anschließend durch die Erd anziehung beschleunigt wird, dann ist beim Erreichen dieses Punktes die gesamte potenzielle Energie in kinetische Energie umgewandelt worden, d. h., es gilt: 1 2 mv = mgh 2
(3.54)
Durch Umstellen nach v erhält man eine einfache Möglichkeit, die Endgeschwindig keit zu bestimmen: v = √2gh
(3.55)
Diese hängt lediglich von der Höhendifferenz ab. Der dargestellte Zusammenhang kann ebenfalls ohne Energieerhaltung mit den entsprechenden Gleichungen aus der Kinematik hergeleitet werden (s. senkrechter Wurf). Das hier vorgestellte Verfahren ist allerdings eleganter und deutlich kürzer. Ein weiterer Vorteil bei der Verwendung der Energieerhaltung liegt darin, dass die genauen Ursachen und Vorgänge, die zu der berechneten Endgeschwindigkeit führen, nicht bekannt sein müssen, solange der Energieerhaltungssatz gültig ist.
Experiment: Energieerhaltungssatz Der Energieerhaltungssatz kann mithilfe eines langen, an der Decke befestigten Fadenpendels ge zeigt werden, an dem eine schwere Kugel als Gewicht befestigt worden ist. Eine Versuchsperson stellt sich mit dem Rücken an eine Wand und hält die Kugel an ihre Nasenspitze. Nach dem Loslas sen und Zurückschwingen erreicht die Kugel aufgrund der Energieerhaltung maximal die gleiche Position. Unter Berücksichtigung von Reibungsverlusten ist die erreichbare Höhe dagegen gerin ger.
3.5.5 Leistung Die aufgebrachte Leistung eines Systems ist definiert als die verrichtete Arbeit pro Zeit einheit: P=
dE dt
(3.56)
Dieser Zusammenhang gilt nicht nur für die mechanische Energie, sondern auch für alle anderen Energieformen, die in den folgenden Kapiteln besprochen werden. Falls in gleichen Zeitabschnitten gleich große Energiemengen umgewandelt werden, lässt sich dieser Differenzialquotient auf die folgende Form vereinfachen: P=
∆E ∆t
(3.57)
3.6 Hooke’sches Gesetz | 65
Der Begriff der Leistung soll an einem medizinischen Beispiel etwas ausführlicher be sprochen werden: Bei einem gesunden Erwachsenen mit einer Masse von 70 kg liegt der Hämoglobinwert bei etwa 5⋅106 μl. Das menschliche Herz kann bei anstrengenden Tätigkeiten etwa bis zu 150-mal pro Minute schlagen und bei jedem Schlag 175 cm3 /s Blut durch den Körper pumpen. Wenn man nun berücksichtigt, dass sich an jeden die ser Proteinkomplexe vier Sauerstoffatome binden können, dann bedeutet dies, dass umgerechnet 3,5 ⋅ 1017 Sauerstoffatome beziehungsweise 580 ⋅ 10−8 mol pro Sekunde zu den Muskeln transportiert werden und dort mit Zuckermolekülen reagieren kön nen. Zucker besitzt eine molare Masse von etwa 342 g/mol, sodass folglich 0,019 g/s Zucker verbrannt werden können. Der Brennwert von Zucker beträgt ca. 17 kJ/g und der Wirkungsgrad der Muskeln bei der Umwandlung in mechanische Arbeit kann mit 25 % angenommen werden. Multipliziert man diese Größen miteinander, so ergibt sich, dass ein durchschnittlicher Mensch etwa 80 W Leistung erzeugen kann, was einem Höhenunterschied von ca. 10 cm/s entspricht, wenn man diesen Wert in die Formel für die potenzielle Energie einsetzt. Hierbei handelt es sich natürlich nur um eine sehr stark vereinfachte Betrachtung, die dem in der Literatur angegebenen Wert für die Durchschnittsleistung eines Menschen allerdings schon sehr nahe kommt. Kurzzeitig kann ein Mensch allerdings noch viel mehr Leistung erbringen. Diese kann je nach Situation bis zu 2 kW betragen.
3.6 Hooke’sches Gesetz Das Hooke’sche Gesetz ist benannt nach Robert Hooke und beschreibt die elastische Verformung von Festkörpern. Ein bekanntes Beispiel ist die Dehnung einer Feder wie in Abbildung 3.8 dargestellt. Die linke Feder befindet sich nach dem Anbringen eines Gewichts im Gleichgewichtszustand, während die rechte Feder zusätzlich mit einer Kraft F A um die Strecke x ausgelenkt wurde. Da die Feder bestrebt ist, zu ihrer Ur sprungslage zurückzukehren, wirkt eine Rückstellkraft F R auf den Schwerpunkt des Gewichts, die betragsmäßig gleich der angreifenden Kraft, dieser aber entgegen ge richtet ist. Im Falle einer elastischen Dehnung ist die Rückstellkraft direkt proportio
FR
s FG
FG FA
Abb. 3.8: Zur Illustration des Hooke’schen Gesetzes am Beispiel ei ner Feder. Die linke Feder befindet sich nach dem Anbringen eines Gewichts im Gleichgewicht, wohingegen die rechte Feder mit einer zusätzlichen Kraft nach unten gedehnt wurde und dadurch eine Rück stellkraft erfährt.
66 | 3 Mechanik
nal zur Ausdehnung: F R (s) = −ks
(3.58)
Das Minuszeichen gibt die Richtung der Kraft gegenüber der Ausdehnung an. Die Pro portionalitätskonstante k nennt man in diesem Zusammenhang Federkonstante. Sie besitzt die Einheit N/m und hängt vom Material, der Länge und dem Querschnitt der Feder ab. Anwendung findet das Hooke*sche Gesetz zum Beispiel bei einem Feder kraftmesser wie in Abbildung 3.9 gezeigt. An der Feder ist eine lineare Skala ange bracht, die bei einer angreifenden Kraft aus dem Gehäuse des Kraftmessers herausge zogen wird. Hierbei gilt: Je kleiner die Federkonstante ist, desto weiter dehnt sich die Feder pro Kraft und desto geringer wird der Ablesefehler. Neben der Kraft spielt oft die gespeicherte Spannenergie eine wichtige Rolle. Da die Kraft selbst von der Ausdehnung abhängt, muss diese durch Integration bestimmt werden: s
Esp = − ∫ F R (s ) ds
(3.59)
0
Einsetzen des Hooke’schen Gesetzes und Ausrechnen des Integrals liefern damit: Esp =
1 2 ks 2
(3.60)
Bemerkenswert ist hierbei der quadratische Zusammenhang zwischen der Energie und der Auslenkung sowie der konstante Faktor 1/2. Die Form hat damit Ähnlichkeit zu der bereits zuvor definierten kinetischen Energie eines Körpers. Experiment: Hooke’sches Gesetz Zum Demonstrieren des Hooke’schen Gesetzes wird eine senkrecht hängende Feder mit unter schiedlich schweren Gewichten belastet und die Auslenkung der Feder gemessen. Beim Zeichnen der Messkurve ergibt sich ein linearer Zusammenhang zwischen beiden Größen.
Abb. 3.9: Anwendung des Hooke’schen Gesetzes bei einem Kraftmesser.
3.7 Rotation
| 67
3.7 Rotation 3.7.1 Winkelgeschwindigkeit Eine wichtige Einheit bei der Beschreibung von Rotationsbewegungen ist das Bogen maß, das mit der Bezeichnung rad abgekürzt wird. Zur Herleitung ist in Abbildung 3.10 ein Kreissegment der Länge s eingezeichnet. Diese Strecke lässt sich aus dem Umfang eines Kreises U = 2πr berechnen, indem man sie mit dem Verhältnis des eingeschlos senen Winkels α im Winkelmaß (Abkürzung deg) und dem Winkel des Vollkreises mul tipliziert: α[deg] r (3.61) s = 2π ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ 360° α[rad]
Der Term vor dem Radius, der den Winkel α im Gradmaß enthält, lässt sich wie gezeigt zu demselben Winkel im Bogenmaß zusammenfassen. Die Nützlichkeit dieser Einheit zeigt sich in der Beziehung zwischen Kreisbogenlänge und Radius, wenn der Winkel direkt im Bogenmaß angegeben ist. Dann lässt sich nämlich einfach schreiben: s = αr
(3.62)
Daraus folgt für den Umrechnungsfaktor zwischen Winkel- und Bogenmaß: α[rad] = π
α[deg] 180°
(3.63)
Der Vollwinkel 360° im Gradmaß entspricht daher der Größe 2π im Bogenmaß.
s
α
r
Abb. 3.10: Skizze zur Herleitung des Bogenmaßes. Der Kreisbogen mit der Länge s umschließt den Winkel α. Alle Punkte auf dem Kreissegment haben den Abstand r zum Kreismittelpunkt.
Bewegt sich nun ein Körper auf einer gekrümmten Bahn, zum Beispiel einem Kreis, dann wird die Geschwindigkeit entlang dieser Bahn als Bahngeschwindigkeit und üb licherweise mit v⃗ bezeichnet. Die Definition der Bahngeschwindigkeit entspricht der in dem Abschnitt 3.2.1 dargestellten Form: v⃗ =
dr⃗ dt
(3.64)
Im Falle einer Kreisbahn lässt sich diese einfach aus dem Umfang des Kreises und der dabei beim Umlauf verstrichenen Zeit berechnen. Die Zeit T, die der Körper für einen
68 | 3 Mechanik
Umlauf benötigt, wird Umlaufzeit genannt. Für die Bahngeschwindigkeit des Körpers ergibt sich damit: ∆s 2πr = (3.65) v= ∆t T Der Term 2π/T gibt an, welche Zeit zum Überstreichen des Gesamtwinkels 2π benö tigt wird, und wird deshalb als Winkelgeschwindigkeit bezeichnet. Zusammen mit der Definition des Bogenmaßes ergibt sich der folgende Zusammenhang zwischen Bahnund Winkelgeschwindigkeit: v = ωr
(3.66)
Hierbei ist zu berücksichtigen, dass die Winkelgeschwindigkeit unbedingt im Bogen maß angegeben sein oder zunächst in diese Einheit umgerechnet werden muss. Bei der räumlichen Bewegung ist weiterhin zu berücksichtigen, dass die Winkelgeschwin digkeit genauso wie die Bahngeschwindigkeit ein Vektor ist, der so definiert ist, dass er senkrecht auf dem Radius- und dem Geschwindigkeitsvektor steht.
3.7.2 Zentripetalkraft Wenn ein Körper beschleunigt wird, dann ändert sich entweder der Betrag oder die Richtung seiner Geschwindigkeit. Wenn man eine Kugel an einen Faden bindet und diese anschließend herumwirbelt, dann muss eine Zwangskraft auf die Kugel wirken, die diese auf eine Kreisbahn zwingt. Eine Formel zur Berechnung dieser sog. Zentri petalkraft soll im Folgenden hergeleitet werden. Die Position der Kugel lässt sich, wie in Abbildung 3.11 dargestellt, durch den Orts vektor r ⃗ wie folgt ausdrücken: r⃗ = (
cos α cos ωt )=( ) sin α sin ωt
(3.67)
Hierbei wurde der Winkel α durch das Produkt ωt ersetzt. v
a y
r α x
Abb. 3.11: Ein Körper erfährt die Radialbeschleunigung a⃗ und wird dadurch auf eine Kreisbahn gelenkt. Die Vektoren r ⃗ und v⃗ geben jeweils zum Zeitpunkt die aktuelle Position und Geschwin digkeit des Körpers an.
3.7 Rotation
| 69
Leitet man r ⃗ komponentenweise nach der Zeit ab, dann erhält man unter Anwen dung der Kettenregel für die Bahngeschwindigkeit: v⃗ = ω (
− sin ωt ) cos ωt
(3.68)
Das Skalarprodukt von v⃗ und r ⃗ ergibt zu jedem Zeitpunkt t den Wert 0, d. h., der Ge schwindigkeitsvektor steht bei einer Kreisbewegung immer senkrecht auf dem Ab standsvektor. Nochmaliges Ableiten nach der Zeit liefert dann für die Beschleunigung: cos ωt ) = −ω2 r ⃗ a⃗ = −ω2 ( sin ωt
(3.69)
Wie man sieht, ist diese antiparallel zum Ortsvektor gerichtet und zeigt immer zum Kreismittelpunkt. Man spricht daher von einer sogenannten Radialbeschleunigung. Betrachtet man lediglich den Betrag von a⃗ und multipliziert man diesen mit der Mas se m, dann erhält man die folgende Formel für die Zentripetalkraft: FZ = mω2 r
(3.70)
Durch die Ersetzung von ω durch v/r nach Gleichung (3.66) erhält man eine alternative Darstellung, die in der Literatur ebenfalls häufig zu finden ist. In diesem Fall ergibt sich folgende Beziehung zwischen der Zentripetalkraft und der Bahngeschwindigkeit:
FZ =
mv2 r
(3.71)
Welche der beiden Formeln zur Anwendung kommt, hängt konkret vom jeweils vor liegenden Fall ab.
Experiment: Messung der Zentripetalkraft Ein Wagen, der mit unterschiedlichen Gewichten bestückt werden kann, befindet sich auf einer Schiene und ist über ein Seil, das über eine Umlenkrolle geführt wird, mit einem senkrecht hängen den Kraftmesser verbunden. Die gesamte Apparatur kann über einen Motor zur Rotation gebracht werden. Anschließend kann die Zentripetalkraft am Kraftmesser für verschiedene Abstände zwi schen Wagen und Drehachse, Massen und Winkelgeschwindigkeiten bestimmt werden.
70 | 3 Mechanik
3.8 Stoßprozesse 3.8.1 Zentraler inelastischer Stoß Bei einem total inelastischen Stoß bleiben beide Stoßpartner nach dem Stoß mitein ander verbunden. Der Einfachheit halber betrachten wir lediglich einen zentralen in elastischen Stoß, bei dem sich beide Stoßpartner entlang einer Achse bewegen. In diesem Fall lässt sich die Impulsbilanz folgendermaßen schreiben: p1 + p2 = p1 + p2
(3.72)
Einsetzen der Definition des Impulses liefert: m1 v1 + m2 v2 = m1 v1 + m2 v2
(3.73)
Berücksichtigt man nun, dass beide Körper nach dem Stoß zusammenhaften und da her die gleiche Endgeschwindigkeit haben müssen, d. h., v1 = v2 = v , dann erhält man durch Umformen der Gleichung nach v die folgende Formel für v : v =
m1 v1 + m2 v2 m1 + m2
(3.74)
Beide Körper bewegen sich nach dem Stoß mit der Geschwindigkeit ihres gemeinsa men Schwerpunktes weiter. Wir betrachten nun die Energieerhaltung in diesem System etwas genauer. Die Gesamtenergie muss wie in jedem physikalischen System immer vollständig erhalten sein. Betrachtet man allerdings lediglich die kinetische Energie, dann stellt man fest, dass diese nach dem Stoß kleiner ist als vor dem Stoß. Dies lässt sich zeigen, indem man die kinetischen Energien vor und nach dem Stoß voneinander subtrahiert: ∆E = Ekin − Ekin
(3.75)
Dies ergibt ausgeschrieben: ∆E =
1 1 1 m1 v21 + m2 v22 − (m1 + m2 )v2 2 2 2
(3.76)
Setzt man nun Gleichung (3.74) ein, dann erhält man für die Differenz der Energien: ∆E =
1 m1 ⋅ m2 (v1 − v2 )2 2 m1 + m2
(3.77)
In Worten bedeutet dieser Zusammenhang: Je größer der Geschwindigkeitsunter schied der beiden Körper vor dem Stoß war, desto größer ist die Differenz der kineti schen Energien vor und nach dem Stoß. Da Energie allerdings nicht verloren gehen
3.8 Stoßprozesse
| 71
kann, geht diese in Verformungs- und Wärmeenergie der beiden Körper über. Dies lässt sich besonders gut an den verformten Karosserien zweier Autos nach einem in elastischen Zusammenstoß beobachten. Im Extremfall haben beide Körper identische Massen und gleiche Geschwindigkeitsbeträge mit entgegengesetztem Vorzeichen. In diesem Fall ruhen beide Körper nach dem Stoß, weil dann v = 0 gilt, und die gesamte Energie geht in die Verformung über.
Experiment: Inelastische Stöße Zwei Gleiter, die mit Knetmasse präpariert wurden, stoßen auf einer Luftkissenbahn zusammen und bleiben nach dem Stoß miteinander verbunden. Mit verschiedenen Massen und Geschwindig keiten können die Formeln des inelastischen Stoßes bestätigt werden.
3.8.2 Zentraler elastischer Stoß Beim inelastischen Stoß reicht die Impulserhaltung nicht aus, da beide Körper nach dem Stoß unterschiedliche Geschwindigkeiten haben können. Die Gleichung beinhal tet dementsprechend zwei Unbekannte, von denen eine eliminiert werden muss. Dies erreicht man durch die Berücksichtigung einer zweiten Bedingung, die erfüllt sein muss: die Erhaltung der kinetischen Energie. Beide Gleichungen zusammen lassen sich wie folgt schreiben: m1 v1 + m2 v2 = m1 v1 + m2 v2 1 1 1 1 2 m1 v21 + m2 v22 = m1 v2 1 + m2 v2 2 2 2 2
(3.78) (3.79)
Um aus diesem Gleichungssystem die Größen v1 und v2 berechnen zu können, kann aus der unteren Gleichung zunächst der Faktor 1/2 herausgekürzt werden. Danach er hält man: 2 m1 v21 + m2 v22 = m1 v2 (3.80) 1 + m2 v2 Umformen und Verwendung der dritten binomischen Formel ergeben: m1 (v1 − v1 )(v1 + v1 ) = m2 (v2 − v2 )(v2 + v2 )
(3.81)
Eine ähnliche Umformung kann mit der oberen Gleichung (3.78) durchgeführt werden, sodass sich folgender Zusammenhang ergibt: m1 (v1 − v1 ) = m2 (v2 − v2 )
(3.82)
Dividiert man nun die erste Gleichung durch die zweite, dann erhält man v1 + v1 = v2 + v2
(3.83)
72 | 3 Mechanik
und den folgenden Zusammenhang zwischen den Relativgeschwindigkeiten vor und nach dem Stoß: (3.84) v1 − v2 = v2 − v1 Mithilfe dieser Gleichung kann nun eine der beiden Endgeschwindigkeiten eliminiert werden. Umstellen nach v1 und Einsetzen in die Gleichung der Impulserhaltung er geben: m1 v1 + m2 v2 = m1 (v2 − v1 − v2 ) + m2 v2 (3.85) Die so gewonnene Gleichung muss anschließend ausmultipliziert und nach v2 um gestellt werden. Als Ergebnis für die Endgeschwindigkeit des zweiten Stoßpartners erhält man dadurch: v2 =
m1 (2v1 − v2 ) + m2 v2 m1 + m2
(3.86)
Analog kann durch Umstellen nach v2 die Endgeschwindigkeit für den ersten Stoß partner ausgerechnet werden: v1 =
m1 v1 + m2 (2v2 − v1 ) m1 + m2
(3.87)
Drei wichtige Spezialfälle sollen im Folgenden betrachtet werden: 1. Gleiche Massen der Körper (m1 = m2 = m) und ruhender Stoßpartner (v2 = 0): Der stoßende Körper ruht nach dem Stoß, da v1 = 0, und der Stoßpartner bewegt sich mit der Geschwindigkeit v2 = v1 , die der erste Körper vor dem Stoß hatte, weiter. 2. Gleiche Massen (m1 = m2 = m) und entgegengesetzte Geschwindigkeiten (v2 = −v1 ): Die Beträge der Geschwindigkeiten ändern sich nicht, aber die Richtung kehrt sich um (v1 = −v1 ) und v2 = −v2 . 3. Ruhender Stoßpartner (v2 = 0) mit unendlich großer Masse (m2 → ∞): Der Stoß partner bleibt in Ruhe (v2 = 0), während der v1 zu −v1 wird, d. h., die Richtung des stoßenden Körpers kehrt sich um, der Betrag der Geschwindigkeit bleibt al lerdings gleich groß.
Experiment: Elastische Stöße Der elastische Stoß lässt sich ebenfalls mithilfe zweier Gleiter verdeutlichen, die mit verschie denen Geschwindigkeiten und Massen gegeneinanderstoßen. Ein weiteres Beispiel ist die Aufund Abbewegung eines Gummiballs. Hierbei kann die Masse des Stoßpartners (Boden) als un endlich groß angesehen werden, sodass der Gummiball jedes Mal annähernd die gleiche Höhe erreicht.
3.9 Starre Körper | 73
3.8.3 Scheinkräfte Scheinkräfte sind Kräfte, die lediglich für einen Beobachter innerhalb eines beschleu nigten Bezugssystems auftreten und nicht dem dritten Newton’schen Axiom unterlie gen. Sie entstehen durch die Trägheit des Beobachters und werden daher auch Träg heitskräfte genannt. Ein intuitives Beispiel ist die Kraft, die auf Insassen in einem an fahrenden Bus wirkt. Die Passagiere spüren eine unsichtbare Kraft, die sie gegen die Sitze drückt. Zu dieser Kraft existiert allerdings keine Gegenkraft. Ein Außenstehender würde die Situation korrekt interpretieren: Durch das Anfahren des Busses drücken die Sitze gegen die Passagiere. Da diese bedingt durch ihre Masse eine Trägheit be sitzen, ist zum Beschleunigen der Passagiere eine Kraft nötig. Dadurch wirkt auf die Sitze eine gleich große Gegenkraft, die als einzige Kraft von den Insassen beobachtet wird. Der Bus muss bei Anwesenheit von Passagieren demzufolge eine größere Kraft aufbringen, um die gleiche Beschleunigung zu erzielen, da seine Gesamtmasse größer wird. Ähnlich verhält es sich mit der Zentrifugalkraft, die lediglich von Beobachtern ge messen werden kann, die sich auf einer Kreisbahn bewegen. Ein bekanntes Beispiel ist die Drehbewegung in einer Zentrifuge bei der Ausbildung zum Astronauten. Der mit bewegte Beobachter wird durch eine Scheinkraft nach außen gedrückt, während ein Außenstehender die Situation wie folgt beschreibt: Der Sitz der Zentrifuge muss auf den Insassen eine Zentripetalkraft ausüben, um ihn auf eine Kreisbahn zu zwingen, wohingegen der Insasse eine Gegenkraft auf den Sitz ausübt. Eine dritte Scheinkraft entsteht ebenfalls in rotierenden Bezugssystemen und wird Corioliskraft genannt. Wenn sich beispielsweise zwei Personen auf einer rotie renden Scheibe genau gegenüber stehen und sich gegenseitig einen Ball zuwerfen, dann wird dieser scheinbar entgegen der Drehrichtung der Scheibe abgelenkt. Auch hier kann die Situation lediglich von außen korrekt beschrieben werden: Der Ball bewegt sich nach dem Abwurf aufgrund seiner Trägheit geradlinig weiter, da er dann keinen Kontakt mehr zu der Scheibe hat, während sich die Personen auf der Schei be kontinuierlich in Drehrichtung weiterbewegen. Ein berühmtes Beispiel für die Corioliskraft ist das Foucault’sches Pendel, mit dessen Hilfe die Erdrotation nachge wiesen werden kann. Während sich die Pendelebene für einen Beobachter auf der Erde scheinbar dreht, bleibt diese für einen Beobachter aus dem Weltraum konstant, wohingegen sich die Beobachter auf der Erde um das Pendel herum bewegen. Bei der korrekten Beschreibung von Bewegungen ist daher die Wahl des richtigen Bezugssys tems essenziell.
3.9 Starre Körper Reale Körper unterscheiden sich von Massepunkten darin, dass sie eine Ausdehnung besitzen. Sie können somit neben geradlinigen Bewegungen auch Rotationsbewegun
74 | 3 Mechanik
gen um eine beliebige Drehachse durchführen. In einem starren Körper sind zusätz lich alle Punkte fest miteinander verbunden und bewegen sich bei einer Rotation mit derselben Winkelgeschwindigkeit um die gemeinsame Drehachse.
3.9.1 Schwerpunkt Der Schwerpunkt (genauer eigentlich Massenmittelpunkt) eines Systems aus Masse punkten mit den Massen m i und den Abständen r ⃗i zum Koordinatenursprung kann als gewichteter Mittelwert aufgefasst werden. Er lässt sich allgemein wie folgt berech nen: rS⃗ =
∑i m i r i⃗ ∑i m i
(3.88)
Betrachtet man lediglich zwei Massen m1 und m2 und leitet die sich ergebende Glei chung nach der Zeit ab, so erhält man v⃗ S =
m1 v⃗ 1 + m2 v⃗2 m1 + m2
(3.89)
und damit die Geschwindigkeit des Schwerpunktes der beiden sich mit v⃗ 1 und v⃗ 2 be wegenden Massen. Die entspricht exakt der Bewegung nach einem inelastischen Stoß und ist daher mit Gleichung (3.74) identisch. Für die Berechnung des Schwerpunktes eines zusammenhängenden, starren Kör pers der Masse M wird dieser, wie in Abbildung 3.12 dargestellt, in kleine Massenwür fel ∆m i eingeteilt, die jeweils den Abstand r i⃗ zum Koordinatenursprung haben. Damit ergibt sich für den Schwerpunkt: rS⃗ =
1 ∑ ∆m i r ⃗i M i
(3.90)
Wählt man die Massenwürfel beliebig klein, d. h., man bildet den Grenzwert ∆m → 0, dann geht die Summe in ein Integral über und man erhält: rS⃗ =
1 ∫ m(r)⃗ dr ⃗ M
(3.91)
∆ mi ri
O
Abb. 3.12: Die Darstellung eines starren dreidimensionalen, beliebigen starren Körpers zur Bestimmung des Schwerpunk tes. Mithilfe dieser Skizze kann ebenfalls die Berechnung des Trägheitsmomentes abgeleitet werden.
3.9 Starre Körper | 75
Mit der Definition der Dichte ϱ=
m V
(3.92)
als Quotient von Masse und Volumen eines Körpers folgen dann drei unabhängige Gleichungen zur Berechnung des Schwerpunktes für jede Raumkoordinate: 1 ∫ xϱ(x, y, z) dx M 1 ∫ yϱ(x, y, z) dy yS = M 1 ∫ zϱ(x, y, z) dz zS = M
xS =
(3.93) (3.94) (3.95)
Zur Berechnung dieser Integrale muss die Dichte entweder in jedem Punkt konstant sein, d. h. ein homogener Körper vorliegen, oder als Funktion der Raumkoordinaten gegeben sein. Für einige homogene Körper lassen sich die Integrale analytisch berech nen. Beispiele dafür sind in der Tabelle 3.1 zusammengefasst. Tab. 3.1: Einige Formeln zur Berechnung von bestimmten geometrischen Körpern.
Körper
Trägheitsmoment
Quader
xS =
Pyramide Kugelsegment
1 1 1 a, y S = b, z S = c 2 2 2 1 1 1 xS = a, y S = b, z S = h 2 2 4 1 1 3 (2r − h)2 xS = r, y S = r, z S = 2 2 4 (3r − h)
Bemerkung a, b, c: Seitenlängen a, b: Seitenlängen, h: Höhe r: Kugelradius, h: Höhe
Experiment: Bestimmung von Schwerpunkten Die Berechnung der Integrale für beliebig geformte Körper kann relativ aufwendig sein. Man kann den Schwerpunkt allerdings auch experimentell bestimmen. Hängt man einen Körper nachein ander an zwei verschiedenen Punkten drehbar auf, dann dreht sich dieser jeweils so, dass der Schwerpunkt exakt unterhalb der Aufhängung liegt. Zieht man nun für beide Positionen jeweils eine lotrechte Verbindungslinie vom Aufhängepunkt aus nach unten, dann schneiden sich die bei den Linien genau im Schwerpunkt.
76 | 3 Mechanik
3.9.2 Drehmoment Wenn eine Kraft F⃗ an einer beliebigen Stelle eines Körpers mit dem Abstandsvektor r ⃗ zum Schwerpunkt angreift, dann ist das sich daraus ergebende Drehmoment definiert als das Kreuzprodukt von r ⃗ und F:⃗ D⃗ = r ⃗ × F⃗
(3.96)
Der Vektor des Drehmoments steht daher senkrecht auf r ⃗ und F.⃗ Der Betrag des Dreh moments lässt sich entsprechend der Definition des Kreuzprodukts als D = Fr sin α
(3.97)
schreiben. Hierbei ist α der Winkel zwischen der angreifenden Kraft und dem Ab standsvektor. Die zugehörigen Größen und Richtungen der Vektoren können aus Ab bildung 3.13 entnommen werden. Damit sich ein Körper nicht bewegt, müssen sich ähnlich wie bei der Translation alle angreifenden N-Drehmomente gegenseitig aufhe ben, d. h., es muss gelten: N
∑ D⃗ i = 0⃗
(3.98)
i=1
Dieser Zusammenhang kann eindrucksvoll am Beispiel eines einfachen Modells des menschlichen Arms untersucht werden. Der Bizeps ist über die distale Bizepssehne mit dem Unterarm verbunden und greift dort im Allgemeinen unter dem Winkel α mit der Kraft F⃗ an. Die Größe des Winkels hängt davon ab, wie stark der Arm gestreckt ist. Der Abstand zwischen dem Angriffspunkt und dem Ellenbogengelenk werde wie in Abbildung 3.13 dargestellt mit l1 bezeichnet, wohingegen l2 die Strecke zwischen Ellenbogen und Hand ist. Befindet sich in dieser ein Gewicht der Masse m, so wirkt auf das Gelenk das Drehmoment D = mgl2 . Das Drehmoment des Muskels ergibt sich hingegen zu D = F sin α. Da sich im Gleichgewichtszustand alle Drehmomente gegen
D
l2 α r
F
l1 α
F FG
Abb. 3.13: Skizze zur Definition des Drehmoments (links) sowie zur Anwendung beim Bizepsmuskel (rechts).
3.9 Starre Körper | 77
seitig aufheben müssen, ergibt sich folglich für die aufzubringende Muskelkraft: F=
mgl2 l1 sin α
(3.99)
Wichtig zu wissen ist, dass sich Muskeln nicht von sich aus dehnen können, sondern lediglich zusammenziehen. Der Bizeps wird daher Beuger genannt. Um den Arm nach dem Beugen wieder zu strecken, benötigt man einen Strecker, der im Falle der Arm muskulatur Trizeps genannt wird. Aus dem Drehmomentsatz leitet sich auch das bekannte Hebelgesetz ab. Dieses lautet sinngemäß und in einfacher Form zum besseren Einprägen: Kraft mal Kraftarm = Last mal Lastarm. Damit sich also beispielsweise eine Waage im Gleichgewicht befindet, müssen sich die Drehmomente auf beiden Seiten gegenseitig aufheben. Eine Illustration des He belgesetzes ist in Abbildung 3.14 zu sehen. Zwei Körper befinden sich auf einem in seinem Schwerpunkt gelagerten Balken. Die Waage bleibt genau dann im Gleichge wicht, wenn das Verhältnis der Gewichtskräfte F1 und F2 gleich dem umgekehrten Verhältnis der Abstände zur Drehachse ist: F1 l2 = F2 l1
(3.100)
Wie man aus dieser Gleichung sieht, befindet sich der Schwerpunkt des Systems dann genau über der Drehachse, die die Gewichtskraft des Balkens und der Gewichte kom pensieren muss. Das Foto einer Balkenwaage ist in Abbildung 3.15 zu sehen. Der unbe lastete Balken wurde hierbei in seinem Schwerpunkt drehbar gelagert. Durch das An bringen verschiedener Gewichte mit unterschiedlichem Abstand zur Drehachse lässt sich das Hebelgesetz auf eine Weise experimentell zeigen. l1
l2 SP
F1 F2 Abb. 3.14: Eine Balkenwaage mit zwei Gewichten zur Illustration des Hebelgesetzes. Die Waage befindet sich genau dann im Gleichgewicht, wenn das Hebelgesetz erfüllt ist.
78 | 3 Mechanik
Abb. 3.15: Eine einfache Balkenwaage mit Löchern zum Anbringen von Gewichten.
3.9.3 Rotationsenergie & Trägheitsmoment Die gesamte Energie, die in der Rotation eines starren Körpers um seinen Schwerpunkt steckt, lässt sich berechnen, indem man ihn in N kleine Würfel mit der Masse ∆m i un terteilt und für jeden Würfel die kinetische Energie berechnet. Dieses Verfahren gleicht der Berechnung des Schwerpunktes. Anschließend muss über alle Energien summiert werden. Jeder dieser Würfel besitzt den Abstand r ⃗i zum Schwerpunkt. Damit ergibt sich: N N 1 1 Erot = ∑ ∆m i v2i = ∑ ∆m i ω2 r2i (3.101) 2 2 i=1 i Im letzten Schritt wurde die Beziehung v = ωr ausgenutzt, da die Winkelgeschwindig keit überall gleich groß ist. Den genauesten Wert erhält man, wenn man die einzelnen Würfel unendlich klein macht, d. h. den Grenzwert ∆m → 0 bildet. In diesem Fall wird aus der Summe ein Integral und es ergibt sich: Erot = ∫
1 2 2 ω r dm 2
(3.102)
Die Größe I = ∫ r2 dm
(3.103)
wird Trägheitsmoment genannt. Einsetzen der Definition des Trägheitsmoments ergibt schließlich eine einfache Formel für die Rotationsenergie: Erot =
1 2 Iω 2
(3.104)
Hierbei muss beachtet werden, dass ein rollender Körper neben der Rotationsenergie auch kinetische Energie besitzt. In diesem Fall ist die Gesamtenergie immer gleich der
3.9 Starre Körper | 79
Tab. 3.2: Eine Auflistung von Trägheitsmomenten verschiedener Körper. Körper Vollzylinder Hohlzylinder Stab Vollkugel Hohlkugel
Trägheitsmoment I I I I I
= = mr 2 = 1/3 mL 2 = 2/5 mR 2 = 2/3 mr 2 1/2 mR 2
Bezeichnungen m: Masse, R: Zylinderradius m: Masse, r: Zylinderradius m: Masse, L: Stablänge m: Masse, R: Kugelradius m: Masse, r: Kugelradius
Summe aus beiden Energieformen: Eroll = Erot + Ekin
(3.105)
Für einen Punkt der Masse m im Abstand r von der Drehachse vereinfacht sich die Definition des Trägheitsmoments zu: I = mr2
(3.106)
Bei einer kontinuierlichen Massenverteilung ist die Rechnung allerdings im Allgemei nen deutlich komplizierter. Für viele geometrische Körper lässt sich das Integral des Trägheitsmoments dennoch analytisch lösen. Tabelle 3.2 zeigt eine Übersicht über be rechnete Trägheitsmomente von Zylindern, Kugeln und einem langen Stab. Ist das In tegral analytisch nicht mehr lösbar, so helfen meistens numerische Berechnungen oder Simulationen. Das Trägheitsmoment von sehr kompliziert geformten Körpern muss allerdings meistens experimentell bestimmt werden.
3.9.4 Drehimpuls Analog zum Drehmoment ist der Drehimpuls eines Körpers definiert als Kreuzprodukt von Abstandsvektor r ⃗ und Bahnimpuls p:⃗ L⃗ = r ⃗ × p⃗
(3.107)
Ersetzt man den Impuls durch seine Definition p⃗ = m v,⃗ dann erhält man L⃗ = m r ⃗ × v⃗
(3.108)
Wir haben bereits gesehen, dass im Falle einer Rotationsbewegung v⃗ immer senkrecht auf r ⃗ steht. Für eine Rotation eines starren Körpers um seinen Schwerpunkt genügt es demzufolge, lediglich den Betrag von L⃗ zu betrachten. Integriert man, wie bereits zuvor gezeigt, über unendlich kleine Massenwürfel, dann ergibt sich: L = ∫ rv dm = ∫ r2 ω dm
(3.109)
80 | 3 Mechanik
Einsetzen der Definition des Trägheitsmoments liefert dann den Zusammenhang zwi schen Drehimpuls und Winkelgeschwindigkeit für einen rotierenden, starren Körper: L = Iω
(3.110)
Zu beachten ist, dass der Drehimpuls in einem abgeschlossenen System so wie die Energie und der Impuls eine Erhaltungsgröße ist. Dies lässt sich zeigen, indem man die zeitliche Ableitung des Drehimpulses bildet: dL⃗ d(r ⃗ × p)⃗ = dt dt
(3.111)
Man kann leicht nachprüfen, dass für die Ableitung des Kreuzproduktes dieselbe Pro duktregel gilt wie für ein Produkt zweier Zahlen: dL⃗ dr ⃗ dp⃗ = × p⃗ + r ⃗ × dt dt dt
(3.112)
⃗ Da die Geschwindigkeit v = dr/dt immer die gleiche Richtung wie der Impuls p⃗ hat, verschwindet der erste Term und übrig bleibt: dp⃗ dL⃗ = r⃗ × = r ⃗ × F⃗ , dt dt
(3.113)
was exakt der Definition des Drehmoments entspricht. Damit ergibt sich für den Zu sammenhang zwischen Drehmoment und Drehimpuls: dL⃗ D⃗ = dt
(3.114)
Um den Drehimpuls eines rotierenden Körpers zu ändern, muss folglich ein Drehmo ment auf diesen ausgeübt werden. Eine Zentralkraft hingegen lässt den Drehimpuls zeitlich konstant. Aus der Drehimpulserhaltung eines Systems ohne äußere Kräfte folgt außerdem folgender Satz: Wenn sich das Trägheitsmoment eines Körpers ändert, dann muss die Winkelgschwindigkeit entsprechend zu- oder abnehmen, damit L kon stant bleibt. Dieser Effekt wird beispielsweise von Eiskunstläuferinnen ausgenutzt, indem sie während der Drehung ihre Arme zu sich heranziehen und damit ihre Dreh zahl während einer Pirouette vergrößern. Leitet man den Drehimpuls explizit nach der Zeit ab, dann erhält man einen Zu sammenhang analog zum zweiten Newton’schen Gesetz bei Translationsbewegun gen: dω⃗ D⃗ = I = I α⃗ (3.115) dt Hierbei bezeichnet α⃗ die vektorielle Winkelbeschleunigung, die als Ableitung der Win kelgeschwindigkeit nach der Zeit definiert ist. Daraus lässt sich ähnlich dem Weg-ZeitGesetz ein Winkel-Zeit-Gesetz für eine konstante Winkelbeschleunigung definieren,
3.9 Starre Körper |
81
das sich wie folgt schreiben lässt: φ(t) =
1 2 αt + ωt + φ0 2
(3.116)
Hierbei wurde die Winkelbeschleunigung als skalare Größe angenommen, d. h., die Richtung der Drehachse bleibt für alle Zeiten konstant.
Experiment: Drehstuhl mit Gewichten Ähnlich wie beim Pirouetteneffekt kann der Drehimpulserhaltungssatz mithilfe eines Drehstuhls und zweier Gewichte anschaulich dargestellt werden. Nachdem sich eine Versuchsperson mit den Gewichten in den Händen und ausgestreckten Armen in den Drehstuhl gesetzt hat, wird dieser in Drehung versetzt. Die Person zieht dann die Arme an ihren Körper heran, woraufhin eine Zunahme der Umdrehungsgeschwindigkeit beobachtet wird. Natürlich wird der Energieerhaltungssatz hier bei nicht verletzt, da die Person Arbeit gegen die nach außen gerichtete Zentrifugalkraft verrichten muss.
Experiment: Rotation eines Speichenrads Eine Versuchsperson auf einem Drehstuhl lässt ein horizontal gehaltenes, schweres Speichenrad in eine schnelle Rotation versetzen. Anschließend wird die Achse nach oben gekippt und das Rad horizontal über den Kopf gehalten, woraufhin der Drehstuhl beginnt, sich in die entgegengesetz te Rotationsrichtung zu drehen. Diese Beobachtung lässt sich unmittelbar mit der Erhaltung des Drehimpulses erklären. Während in vertikaler Richtung zunächst kein Drehimpuls vorhanden ge wesen ist, muss dessen Betrag beim Hochklappen der Drehachse in umgekehrter Richtung auf den Stuhl übertragen werden.
3.9.5 Satz von Steiner Wenn die Drehachse eines Körpers wie in Abbildung 3.16 dargestellt nicht durch sei nen Schwerpunkt verläuft, dann muss die oben genannte Formel für die Berechnung des Trägheitsmoments angepasst werden. Bezeichnen xD und yD des Vektors rD⃗ die Koordinaten der Drehachse und wird der Koordinatenursprung in den Schwerpunkt des Körpers gelegt, so lässt sich das Trägheitsmoment bezüglich dieses Punktes mit hilfe der Länge des Vektors r ⃗ − rD⃗ bestimmen: I = ∫ ((x − xD )2 + (y − yD )2 ) dm
(3.117)
Das Ausmultiplizieren der Klammern liefert mithilfe der zweiten binomischen Formel: I = ∫(x2 + y2 ) dm − 2xD ∫ x dm − 2yD ∫ y dm + ∫ x2D + y2D dm ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ IS
0
0
md2
(3.118)
82 | 3 Mechanik
y O
x
∆mi
r
rD
r − rD D Abb. 3.16: Zur Herleitung des Steiner’schen Satzes
Der erste Summand ergibt das Trägheitsmoment IS und entspricht hierbei dem bereits definierten Trägheitsmoment in Bezug auf den Schwerpunkt des Körpers. Der zweite und dritte Summand verschwinden, da diese jeweils der Definition des Schwerpunk tes entsprechen, der aber hier per Definition mit dem Ursprung des Koordinatensys tems zusammenfällt. Der letzte Summand ist eine Konstante und hängt lediglich vom Abstand d zwischen Schwerpunkt und Rotationsachse und der Gesamtmasse des Kör pers ab. Der Satz von Steiner kann dementsprechend wie folgt geschrieben werden: I = IS + md2
(3.119)
Dieser Satz bietet Vorteile beim Messen und Berechnen komplexer Geometrien, da die se unter Anwendung des besagten Satzes in kleinere Teilbereiche unterteilt werden können, die sich dann einzeln relativ einfach berechnen lassen. Der Satz von Stei ner zeigt auch, dass es ein minimales Trägheitsmoment eines Körpers gibt, das genau dann erreicht werden kann, wenn die Drehachse durch den Schwerpunkt verläuft, weil dann der Zusatzterm md2 verschwindet. Experiment: Messung von Trägheitsmomenten Ein großer Drehteller mit bekanntem Trägheitsmoment wird über einen Motor mit konstantem Drehmoment langsam in Rotation versetzt. Mithilfe einer Lichtschranke können der überstrichene Winkel und somit die Winkelbeschleunigung gemessen werden. Nun legt man ein kleines Gewicht mit bekannter Masse in die Nähe des Randes des Drehtellers. Mithilfe des Satzes von Steiner kann das neue Trägheitsmoment bestimmt und durch die Messung der Winkelbeschleunigung bestätigt werden.
3.9.6 Translation & Rotation Zwischen der Translation und der Rotationsbewegung von Körpern gibt es sehr vie le Analogien, durch die sich bestimmte Gesetzmäßigkeiten leichter merken lassen. So entspricht beispielsweise die Geschwindigkeit bei der geradlinigen Bewegung der
3.10 Reibung | 83
Winkelgeschwindigkeit bei Kreisbahnen. Tabelle 3.3 listet die wichtigsten Beziehun gen inklusive deren Bezeichnungen auf. Tab. 3.3: Analogien zwischen der Translations- und Rotationsbewegung von Körpern.
Translation
Rotation
Strecke
s
φ
Geschwindigkeit
v=
ds dt dv a= dt
ω=
Masse
m
I
Trägheitsmoment
Impuls
p = mv
L = Iω
Drehimpuls
d p⃗ = m a⃗ dt 1 s = at 2 + v 0 t + s0 2 1 E kin = mv 2 2
d L⃗ D⃗ = = I α⃗ dt ⃗ 1 φ = αt 2 + ωt + φ 0 2 1 E rot = Iω 2 2
Beschleunigung
Kraft Weg-Zeit Kinetische Energie
F⃗ =
dφ dt dω α= dt
Winkel Winkelgeschw. Winkelbeschl.
Drehmoment Winkel-Zeit Rotationsenergie
3.10 Reibung 3.10.1 Bedeutung Reibung spielt entgegen der Intuition im Alltag eine wichtige Rolle. Ohne Reibung wäre eine Fortbewegung auf der Erde nicht möglich, da sowohl beim Gehen als auch beim Fahren eines Autos die Kraftübertragung auf den Boden mithilfe von Reibung geschieht. Durch das dritte Newton’sche Axiom entsteht dann eine Gegenkraft, die für eine Beschleunigung sorgt. Streng genommen erfährt die Erde dadurch einen Impuls in die entgegengesetzte Richtung. Dies kann aber aufgrund der enormen Un gleichheit zwischen den Massen vernachlässigt werden. Reibung kann allerdings auch unerwünschte Effekte zur Folge haben. Ein Auto wird beispielsweise langsamer, wenn nicht permanent Energie durch die Verbrennung von Kraftstoff hinzugefügt wird. Auch im menschlichen Körper würde Reibung schweren Abrieb zwischen den Knochen hervorrufen. Daher sind die Gelenkkapseln mit einer Innenhaut ausgeklei det, die Gelenkschmiere (Synovia) absondert, wodurch die Reibung wie beim Ölen eines Scharniers stark reduziert wird. Hinzu kommt noch der Gelenkknorpel, der ebenfalls für eine Verringerung der Reibung zwischen den Knochen sorgt.
84 | 3 Mechanik
3.10.2 Haftreibung Haftreibung tritt dann auf, wenn sich zwei Körper berühren und durch eine Kraft ge geneinandergepresst werden. Ein einfaches Beispiel ist ein Quader, der auf dem Erd boden steht und durch seine Gewichtskraft, die in diesem Fall gleich der Normalkraft ist, gegen diesen gedrückt wird. Um den Quader zu verschieben, muss auf ihn eine Kraft parallel zum Erdboden ausgeübt werden. Man stellt fest, dass der Quader erst ab einem bestimmten Betrag dieser Kraft anfängt, sich in Bewegung zu setzen. Die angreifende Kraft wird also zunächst durch eine Gegenkraft kompensiert, die betrags mäßig gleich, aber entgegengesetzt zur angreifenden Kraft gerichtet ist und als Haft k reibung interpretiert werden kann. Sobald eine kritische Kraft FHR überwunden wur de, setzt sich der Quader in Bewegung. Da ein Körper im idealisierten Fall lediglich mit drei Punkten auf dem Erdboden aufliegt, ist diese kritische Kraft in guter Näherung unabhängig von der Fläche des Körpers und direkt proportional zur Normalkraft. Die Proportionalitätskonstante nennt man Haftreibungskoeffizient μ HR und es gilt: k F⃗ HR = μ HR F⃗ N
(3.120)
Da sich der Körper nicht bewegt und keine Energie in andere Formen, wie beispiels weise Wärme, umgewandelt wird, ist die Haftreibung keine Reibung im engeren Sinn, wird aber dennoch als solche bezeichnet.
3.10.3 Gleitreibung Wenn die Haftreibung zwischen Körper und Erdboden überwunden wurde, also die kritische Kraft erreicht ist, setzt sich der Körper in Bewegung. Während dieser Bewe gung wirkt weiterhin eine Reibungskraft auf ihn, die Gleitreibung genannt wird. Sie hängt von der Normalkraft ab, ist aber in der Regel kleiner als die Haftreibung und im Allgemeinen unabhängig von der Geschwindigkeit des Körpers. Es gilt daher ana log zur Haftreibung der folgende Zusammenhang zwischen Normalkraft und Gleitrei bung: F⃗ GR = μ GR F⃗ N
(3.121)
Der Proportionalitätsfaktor μ GR wird Gleitreibungskoeffizient genannt.
3.10.4 Rollreibung Mit der Rollreibung verhält es sich ähnlich wie mit der Gleitreibung. Auch hier ist die Reibungskraft proportional zur Normalkraft und der Proportionalitätsfaktor wird
3.10 Reibung | 85
Rollwiderstandskoeffizient genannt. Der Rollwiderstand entsteht dadurch, dass so wohl der rollende Körper als auch der Untergrund niemals perfekt starr sind, sondern immer geringfügig deformiert werden können. Neben elastischen Verformungen ent stehen ebenfalls plastische Deformationen, die einen Energieverlust zur Folge haben. Beispiele sind hier Verformungen in Autoreifen oder auch Eisenbahnschienen. Den noch ist die Rollreibung in der Regel um ein Vielfaches kleiner als Gleitreibung. Dieser Effekt wird beispielsweise in Kugellagern ausgenutzt, die damit gegenüber Gleitlager einige Vorteile besitzen.
3.10.5 Luftwiderstand Eine andere Ursache für Energieverlust bei Bewegung ist der sogenannte Luftwider stand. Dieser entsteht durch kontinuierliche Übertragung von kinetischer Energie des bewegten Körpers auf die in Bewegungsrichtung befindlichen Luftmoleküle. Die Mas se mL der Luft lässt sich als das Produkt ϱ L V schreiben, wobei ϱ die Dichte der Luft ist. Weiterhin lässt sich das Volumen V durch das Produkt aus der Angriffsfläche A des Körpers und und der zurückgelegten Strecke s ersetzen. Damit ergibt sich für die übertragene kinetische Energie: EL =
1 ϱ L Asv2 2
(3.122)
Hierbei muss beachtet werden, dass die Fläche des Körpers nicht unbedingt mit der effektiven Angriffsfläche gleichzusetzen ist. Deshalb muss die Gleichung noch mit ei nem Korrekturwert cW , dem sogenannten Widerstandsbeiwert ergänzt werden. Dieser besitzt keine Einheit, kann lediglich experimentell oder mithilfe von Simulationen be stimmt werden. Teilt man die sich ergebende Gleichung durch die Strecke s, dann er hält man folgende Formel für den Luftwiderstand: FLW =
1 cW ϱ L Av2 2
(3.123)
Beim Luftwiderstand handelt es sich demzufolge nicht um eine Reibung im eigentli chen Sinne, da er geschwindigkeitsabhängig ist. Die quadratische Abhängigkeit von v
Experiment: Fallendes Papier Der Luftwiderstand kann mithilfe eines einfachen Blatts Papier sichtbar gemacht werden. Lässt man es zusammen mit einem Stein fallen, dann erreicht das Papier den Boden viel später. Wird es hingegen mehrmals gefaltet, dann werden die Beschleunigungen des Papiers und des Steins ungefähr gleich groß und nähern sich der Erdbeschleunigung an. Derselbe Effekt kann auch mit einer Vakuumkammer sichtbar gemacht werden. Wenn diese vollständig evakuiert wurde, fallen dort Stein und Papier ebenfalls gleich schnell herunter.
86 | 3 Mechanik
ist der Grund für einen erhöhten Kraftstoffverbrauch bei schnellen Fahrten mit Auto beziehungsweise für das Erreichen einer konstanten Fallgeschwindigkeit bei einem Fallschirmsprung.
3.11 Reale Körper Reale Festkörper können im Gegensatz zu Festkörpern durch ausreichende Kraftein wirkung immer verformt werden. Sind die Kräfte zu klein, um die atomaren Bindun gen im Körper zu zerstören, spricht man von einer elastischen Verformung. Bei Einwir kung von sehr großen Kräften können die Strukturen im Festkörper zerstört werden und Verformungen dauerhaft bleiben. Diese Art von Verformung nennt man plastisch.
3.11.1 Dehnung Die folgenden Untersuchungen sollen der Einfachheit halber an einem homogenen Zylinder, zum Beispiel einem dünnen Kupferdraht, der Länge ℓ und der Querschnitts fläche A untersucht werden. Sie gelten ebenfalls für beliebig geformte Körper, müssen dann allerdings meistens aufwendiger berechnet werden. Wenn eine Zugkraft auf die Seitenflächen des Zylinders wirkt, dann dehnt sich der Zylinder um die Länge ∆ℓ. Das Volumen bleibt in der Regel relativ konstant, sodass sich die Querschnittsfläche des Körpers im Allgemeinen verkleinert. Dieser Effekt, der auch als Querkontraktion be zeichnet wird, lässt sich beispielsweise bei Muskeln sehr gut beobachten. Man stellt experimentell fest, dass ∆ℓ proportional zu ℓ wächst, d. h., je länger der Draht ur sprünglich ist, desto weiter lässt er sich dehnen. Weiterhin ist ∆ℓ proportional zur angreifenden Kraft und umgekehrt proportional zur Querschnittsfläche des Drahtes. Mathematisch lässt sich dieser Zusammenhang wie folgt ausdrücken: 1F ℓ (3.124) EA Die Größe E wird Elastizitätsmodul genannt. Hierbei handelt es sich um die Material konstante, die in Tabellenwerken nachgeschlagen werden kann. Der Grund für die Verwendung des Kehrwertes 1/E lässt sich erkennen, wenn man Gleichung (3.124) zu folgender Schreibweise umformt: ∆ℓ =
F ∆ℓ E= (3.125) ℓ A Ersetzt man nun ∆ℓ/ℓ durch die relative Dehnung ε und F/A durch die Zugspannung σ, so erhält man: σ = Eε
(3.126)
Diese Schreibweise ähnelt dem Hooke’schen Gesetz der Federdehnung aus Gleichung (3.58) und wird daher auch als allgemeines Hooke’sches Gesetz bezeichnet. Der Zu
3.11 Reale Körper |
87
sammenhang zwischen beiden Gesetzen wird deutlich, wenn man den Bruch EA/l durch die Federkonstante k und die Längenänderung ∆ℓ durch die Federdehnung s ersetzt.
3.11.2 Kompression Verkleinert sich das Volumen eines Körpers durch eine konstant wirkende Kraft auf al le Seitenflächen, dann spricht man von einer Kompression. Ähnlich zum Hooke’schen Gesetz der Längenänderung ergibt sich für die Änderung des Volumens V folgender Zusammenhang: 1F V (3.127) ∆V = − KA Das Minuszeichen ergibt sich durch die Verringerung des Volumens. Die Konstante K wird analog zur Dehnung Kompressionsmodul genannt. Das Verhältnis von Kraft zu Fläche p=
F A
(3.128)
wird allgemein als Druck bezeichnet und beschreibt die wirkende Kraft pro Fläche. An stelle des Quotienten N/m wird meistens die Einheit Pascal (Pa) verwendet. Speziell beim Luftdruck findet man häufig auch die Einheit bar, die eine einfachere Schreibwei se erlaubt, wobei die Umrechnung zwischen den beiden Einheiten 1 bar = 1 ⋅ 105 Pa lautet. Der mittlere Luftdruck auf Meereshöhe beträgt etwas mehr als 1 bar. Ersetzt man nun noch den Kehrwert 1/K durch die sog. Kompressibilität κ, dann ergibt sich: ∆V = −κp V
(3.129)
Die Kompressibilität ist ebenfalls eine Materialkonstante und in der entsprechenden Literatur auffindbar.
3.11.3 Scherung Wirkt auf einen Körper mit den Seitenflächen A – im Gegensatz zur Dehnung – entlang dieser Fläche eine Kraft F, dann werden die Seitenflächen um den Winkel γ gedreht. Die angreifenden Kräfte werden deshalb auch Scherkräfte genannt. Wir können daher analog zum Druck die Scherspannung als Kraft pro Fläche definieren: τ=
F A
(3.130)
88 | 3 Mechanik
∆
A
F Abb. 3.17: Illustration zur Scherung eines Qua ders mit der Grundfläche A und der angreifen den Kraft F .
γ
Die Länge des Körpers nimmt dabei um ∆ℓ zu, wie in Abbildung 3.17 gezeigt wird. Analog zum Hooke’schen Gesetz gilt wieder: τ=G
∆ℓ ℓ
(3.131)
Die Materialkonstante G wird als Gleitmodul oder Schubmodul bezeichnet. Für den Scherwinkel γ gilt folgender Zusammenhang: tan γ =
∆ℓ ℓ
(3.132)
Für kleine Winkel (γ < 5°) ist tan γ ≈ γ. Damit lässt sich γ bei gegebenem Schubmodul wie folgt berechnen: γ=
τ G
(3.133)
Das Schubmodul muss wie im Falle der Kompressibilität aus der entsprechenden Li teratur entnommen werden.
3.11.4 Torsion Bei einer Torsion wird der Körper, zum Beispiel ein langer Vollzylinder mit der Länge ℓ und der Fläche A, durch ein angreifendes Drehmoment in sich verdrillt. Die wichtigen Größen und ihre Zusammenhänge hierfür sind dabei Abbildung 3.18 zu entnehmen. Auch hier ist der Drehwinkel γ wieder proportional zur angreifenden Kraft, solange die Verdrehung elastisch geschieht. Da es sich bei der Torsion im Prinzip um eine Sche rung handelt, gilt für kleine Winkel ebenfalls Gleichung (3.133). Für uns ist hingegen der Drehwinkel φ interessanter. Dieser kann gemäß Skizze als φ=
∆ℓ r
(3.134)
3.12 Gravitation
| 89
γ ∆ F
r φ
F Abb. 3.18: Skizze zur Torsion eines Drahtes.
ausgedrückt werden, wobei ∆ℓ die Verdrehung bezeichnet. Ebenfalls aus der Skizze ablesen lässt sich für kleine Winkel γ: γ=
∆ℓ ℓ
(3.135)
Setzt man γ in die Gleichung für φ ein, so erhält man insgesamt mit Gleichung (3.133): φ=
τℓ Gr
(3.136)
Zu beachten ist hierbei, dass für ein zylindrisches Objekt die Scherspannung als Quo tient F/πr2 von Kraft und Fläche noch mit dem Wert 4 multipliziert werden muss, um daraus die Torsionsspannung τ zu erhalten.
3.12 Gravitation 3.12.1 Newton’sches Gravitationsgesetz Bei der Gravitation handelt sich um eine Kraft, die auf alle Körper wirkt, welche eine Masse besitzen. Sie wird daher auch Massenanziehung genannt. Die Masse ist dabei so definiert, dass die Gravitation proportional zu ihr zunimmt. Experimente haben außerdem gezeigt, dass die Gravitation zwischen zwei Körpern umgekehrt proportio nal zum Quadrat des Abstands r zwischen ihnen abnimmt. Damit lässt sich für zwei Körper der Massen M und m folgender Zusammenhang formulieren: Mm F⃗ G (r) = G 2 r ̂⃗ r
(3.137)
Der Einheitsvektor r ̂⃗ hat den Betrag 1 und gibt lediglich die Kraftrichtung an. Im Falle eines kugelförmigen Objekts, wie etwa bei Sternen oder Planeten, reicht es hingegen aus, mit dem Betrag zu rechnen. Die Gravitationskonstante G wurde eingeführt, um die
90 | 3 Mechanik
bereits zuvor definierte Masse an die Größe der Gravitationskraft anzupassen. Diese hat den Wert: m2 (3.138) G = 6,67259 ⋅ 10−11 N 2 kg Setzt man für M die Erdmasse mE = 5,972 ⋅ 1024 kg und für den Abstand r den gemit telten Erdradius rE = 6,371 ⋅ 106 m ein, dann ergibt sich unmittelbar der Ortsfaktor g: g=
mE FG = G 2 ≈ 9,81 m/s2 m rE
(3.139)
Diese Rechnung zeigt, dass Fallbewegungen nahe der Erde ein direktes Resultat der Gravitationskraft zwischen dem fallenden Körper und der Erdkugel sind. Weiterhin ist auch bei der Gravitation das dritte Newton’sche Axiom zu beachten. Ein fallen der Gegenstand nahe dem Erdbodens zieht ebenfalls die Erde mit einer Kraft an, die
Abb. 3.19: Eine an der Wand befestigte Gravitationswaage. Die schweren Kugeln bewirken ein Dreh moment auf die leichten Kugeln im Gehäuse. Ein Laserstrahl trifft auf einen an einem Torsionsdraht befestigten Spiegel und wird auf eine Skala reflektiert, die an der gegenüberliegenden Wand ange bracht ist, wodurch sich die Auslenkung und Schwingungsdauer berechnen lassen. Experiment: Gravitationswaage Die Gravitationskonstante (Abbildung 3.19) kann mithilfe einer sog. Gravitationswaage bestimmt werden. Hierbei handelt es sich um eine Drehwaage, bei der zwei kleine Kugeln über eine gemein same Achse an einem Draht befestigt sind. Zwei zusätzlich angebrachte, schwere Kugeln üben auf die beiden leichten Kugeln eine Gravitationskraft aus. Dadurch wirkt ein Drehmoment auf den Draht, das diesen um einen bestimmten Winkel verdreht. Die Verdrehung wird mit einem Laser strahl sichtbar gemacht, der auf einen am Draht befindlichen Spiegel gerichtet ist und auf eine ent fernte Wand projiziert wird. Der Zusammenhang zwischen Drehwinkel und Drehmoment ist gleich dem Zusammenhang zwischen Auslenkung und Kraft beim Hooke’schen Gesetz. Wenn die Pro portionalitätskonstante zuvor über die Periodendauer einer Schwingung des Drahtes gemessen wurde, kann aus dem Drehwinkel und den Massen der Kugeln mithilfe des Gravitationsgesetzes die Gravitationskonstante berechnet werden.
3.12 Gravitation
| 91
der Gewichtskraft des Gegenstandes entspricht. Da die Masse der Erde allerdings um ein Vielfaches größer ist, ist keine signifikante Änderung ihrer Flugbahn zu erwarten. Sobald der Gegenstand den Boden erreicht, kommen beide Körper aufgrund der Im pulserhaltung zum Stillstand.
3.12.2 Fluchtgeschwindigkeit Um die Erde zu verlassen, muss die gesamte potenzielle Energie, die in ihrem Gravi tationsfeld steckt, an Arbeit aufgebracht werden. Die potenzielle Energie (Bindungs energie) Epot einer Körpers der Masse m auf der Oberfläche eines Himmelskörpers der Masse M lässt sich durch Integration des Newton’schen Gravitationsgesetzes vom Ra dius R des Himmelskörpers aus nach Unendlich berechnen: ∞
∞
Epot = ∫ F(r) dr = G ∫ R
mM dr r2
(3.140)
R
Nach Anwendung der Integrationsgesetze ergibt sich: Epot = G
mM R
(3.141)
Beim Einsetzen der Grenzen wurde ausgenutzt, dass der Kehrwert von Unendlich 0 er gibt. Setzt man diese Beziehung mit der kinetischen Energie des Körpers gleich, dann erhält man: 1 2 M v =G (3.142) 2 R Umformen nach v liefert schließlich für die Berechnung der Fluchtgeschwindigkeit für den Himmelskörper: v=√
2GM r
(3.143)
Der sich daraus für die Erde ergebende Wert in Höhe von 11,2 km/s wird auch zwei te kosmische Geschwindigkeit genannt. Diese Geschwindigkeit wird benötigt, um die Erdoberfläche ohne weitere Hilfsmittel verlassen zu können.
3.12.3 Kreisbahngeschwindigkeit Wenn sich ein Körper auf einer Kreisbahn um ein Zentralgestirn herum bewegt, dann wirkt die Gravitation als Zentripetalkraft. Gleichsetzen der beiden Formeln liefert für den Abstand R: v2 GM (3.144) = 2 R R
92 | 3 Mechanik
Um die benötigte Geschwindigkeit für eine stabile Kreisbahn zu berechnen, muss die se Gleichung nach v umgestellt werden: v=√
GM R
(3.145)
Setzt man die entsprechenden Werte für die Erde ein, dann erhält man für diese als erste kosmische Geschwindigkeit bezeichnete Größe einen Wert von 7,91 km/s. Hierbei handelt es sich also um die Geschwindigkeit, die ein Körper benötigt, um nahe der Erdoberfläche um die Erde herum zu kreisen, ohne auf den Boden zu fallen. Dieser Wert ist rein theoretischer Natur, da diese hohen Geschwindigkeiten auf der Erde auf grund des Luftwiderstands praktisch nicht erreichbar sind.
3.12.4 Kepler’sche Gesetze 3.12.4.1 Erstes Kepler’sches Gesetz Die Kepler’schen Gesetze wurden nach dem Wissenschaftler und Astronom Johannes Kepler benannt. Das erste Kepler’sche Gesetz besagt, dass sich Himmelskörper ellip senförmig um einen Zentralkörper bewegen und dass sich dieser Zentralkörper in ei nem der beiden Brennpunkte der Ellipse befindet. Auch die Erde bewegt sich auf ei ner leicht ellipsenförmigen Bahn um die Sonne und besitzt somit zu jedem Zeitpunkt einen anderen Abstand zu ihrem Zentralgestirn. Der sonnennächste Punkt mit dem geringsten Abstand wird Perihel und der sonnenfernste Punkt Aphel genannt. Dieser Zusammenhang soll im Folgenden plausibel gemacht werden: Zunächst betrachten wir die Gesamtenergie Ekin + Epot eines Systems von zwei Massen. Schreibt man in der Formel der kinetischen Energie die Geschwindigkeit v in Polarkoordinaten, dann ergibt sich: Mm 1 (3.146) E = m(r2̇ + r2 θ̇ 2 ) − G 2 r Diese Gleichung lässt sich nur unter großem mathematischen Aufwand analytisch lö sen. Wenn wir allerdings schon davon ausgehen, dass die Planetenbahnen elliptisch v (t)
r (t
r (t)
dt)
b
θ a e Abb. 3.20: Skizze zur Herleitung des ersten und zweiten Kepler’schen Gesetzes.
3.12 Gravitation
|
93
sind, können wir den umgekehrten Weg gehen. Der Radius einer Ellipse in Abhängig keit des Winkels θ, wie in Abbildung 3.20 dargestellt, lässt sich vom Brennpunkt aus wie folgt berechnen: p (3.147) r(θ) = 1 + ε cos θ Die wichtigsten Größen bei der Beschreibung einer Ellipse sind die große Halbach se a und die kleine Halbachse b sowie die Exzentrität e, die den Abstand zwischen Mittel- und Brennpunkt angibt und somit die Abweichung von einem perfekten Kreis darstellt. Zusätzlich dazu definiert man die numerische Exzentrität als ε = e/a mit dem Wertebereich 0 ≤ ε < 1. Der Parameter p = b 2 /a heißt Halbparameter und darf nicht mit dem Impuls verwechselt werden. Wenn die beiden Halbachsen identisch sind, d. h., a = b = r gilt, dann entartet die Ellipse zu einem Kreis mit dem Radius r. Eine Kreisbahn eines Planeten um ein Zentralgestirn kann daher als Spezialfall einer elliptischen Bahn betrachtet werden. Setzt man Gleichung 3.147 in die Energiegleichung ein (dies sei dem geübten Leser überlassen), dann erhält man: E=
L2 m1 m2 L (ε2 − 1) + ε ( −G ) (1 + cos θ) 2 2 p 2mp 2mp
(3.148)
Daraus ergibt sich nun für den Halbparameter p
p=
L2 GMm2
(3.149)
und für die Exzentrität: ε = √1 +
2EL2 Gm21 m22
(3.150)
Liegt eine Kreisbahn vor, dann muss der Radius für alle Winkel konstant sein, d. h., die Exzentrität ε in Gleichung (3.147) verschwindet. Für diesen Fall ergibt sich damit r = p. Ersetzt man nun den Drehimpuls mit L = rmv, ergibt sich für die Kreisbahnge schwindigkeit: v=√
GM r
(3.151)
Dies entspricht der zuvor formulierten ersten kosmischen Geschwindigkeit. Dieses Gesetz gilt streng genommen allerdings nur dann, wenn die Masse des Zentralgestirns so groß ist, dass die anziehende Masse des umkreisenden Himmels körpers vernachlässigt werden kann. Diese Bedingung ist für unser Sonnensystem lediglich näherungsweise erfüllt. Tatsächlich stellt man fest, dass die Planeten und die Sonne um einen gemeinsamen Schwerpunkt, das sogenannte Baryzentrum, her um kreisen. Aus der Definition des Schwerpunktes lässt sich für zwei Körper ableiten,
94 | 3 Mechanik
dass das Verhältnis der Abstände der Massen zum gemeinsamen Schwerpunkt umge kehrt proportional zum Verhältnis der Massen sein muss (s. Hebelgesetz): r1 m 2 = r2 m 1
(3.152)
Bezeichnet r den Abstand zwischen den beiden Massen, dann gilt r = r1 + r2 . Setzt an man diesen Zusammenhang ein, lässt sich der Abstand zwischen Schwerpunkt und Himmelskörper durch Umformen nach r1 beziehungsweise r2 wie folgt bestimmen: r1 =
m1 r m1 + m2
(3.153)
r2 =
m2 r m1 + m2
(3.154)
3.12.4.2 Zweites Kepler’sches Gesetz Das zweite Kepler’sche Gesetz wird auch Flächensatz genannt. Es besagt, dass der Fahrstrahl, also die Verbindungslinie, zwischen einem Himmelskörper und seinem Zentralgestirn in gleich großen Zeitschritten immer gleiche Flächen überschreitet. Für eine kreisförmige Bewegung ist dieser Zusammenhang trivial, da sich die Geschwin digkeit des Himmelskörpers nicht ändert. Bei einer ellipsenförmigen Bahn soll das Gesetz im Folgenden mithilfe der Drehimpulserhaltung hergeleitet werden. Für sehr kleine Zeiten dt entspricht die überstrichene Fläche unter der Ellipse dem ⃗ Diese ist halb so groß wie die Fläche des Paralle Flächeninhalt des Dreiecks (r,⃗ v,⃗ t). logramms, das von den beiden Vektoren r(t)⃗ und v(t) aufgespannt wird, d. h., es muss gelten: 1 ⃗ × v(t)| ⃗ A = |r(t) dt (3.155) 2 Ersetzt man das Kreuzprodukt durch die Definition des Drehimpulses, dann erhält man: 1 L A= dt (3.156) 2m Da sowohl der Drehimpuls als auch die Masse des umkreisenden Himmelskörpers konstant sein müssen, ergibt sich schließlich für das Flächenintegral zwischen zwei beliebigen Zeitpunkten: t1
A=∫ t0
1 L 1 L dt = (t1 − t0 ) 2m 2m
(3.157)
Daraus folgt: Die vom Fahrstrahl überstrichene Fläche hängt damit lediglich vom be trachteten Zeitintervall ab, womit das zweite Kepler’sche Gesetz für den allgemeinen Fall ellipsenförmiger Bahnen bewiesen wurde.
3.13 Zusammenfassung |
95
3.12.4.3 Drittes Kepler’sches Gesetz Das dritte Kepler’sche Gesetz besagt, dass die Quadrate der Umlaufzeiten T1 und T2 von zwei Himmelskörpern um ein Zentralgestirn im gleichen Verhältnis wie die Kuben ihrer großen Halbachsen a1 und a2 stehen: (
T1 2 a1 3 ) =( ) T2 a2
(3.158)
Für eine Kreisbahn lässt sich dieser Zusammenhang schnell herleiten. Setzt man Zen tripetalkraft und Gravitationskraft gleich, dann ergibt sich: M (3.159) R2 Jetzt kann man ω durch 2π/T ersetzen und die Gleichung wie folgt umstellen: ω2 R = G
T 2 4π2 = = const (3.160) GM R3 Die rechte Seite beinhaltet lediglich Konstanten ohne Abhängigkeiten von T oder R, sodass der o. g. Zusammenhang gezeigt wurde. Für den Fall einer elliptischen Bahn bewegung muss der Radius R durch die große Halbachse a ersetzt werden, wobei die exakte Herleitung für allgemeine Bahnkurven den Rahmen dieses Kapitels sprengen würde.
3.13 Zusammenfassung Zunächst werden die für die Kinematik zentralen Begriffe Strecke, Geschwindigkeit und Beschleunigung eingeführt, woraus schließlich das allgemeine Weg-Zeit-Gesetz für beschleunigte Bewegungen hergeleitet wird. Dieses Gesetz wird an den Beispie len verschiedener Bewegungen im Schwerkraftfeld nahe der Erdoberfläche wie dem freien Fall oder dem schiefen Wurf genauer betrachtet. Auf diesen Erkenntnissen auf bauend wird dann zur Dynamik übergeleitet, die Kräfte als Ursache von Bewegungs änderungen betrachtet. Diese Erkenntnisse wurden verwendet, um die Zentripetal kraft herzuleiten, die aufgebracht werden muss, um einen Körper auf eine Kreisbahn zu zwingen. Außerdem ist es mithilfe des Kraftbegriffs möglich, einen quantitativen Zusammenhang zwischen der Dehnung einer Feder und der angreifenden Kraft her zustellen. Weiterhin wird das Superpositionsprinzip am Beispiel einer schiefen Ebe ne betrachtet, das es erlaubt, vektorielle Größen wie Kräfte oder Geschwindigkeit zu zerlegen und komponentenweise zu berechnen. Auch die Reibung zwischen Körpern wird mit dem Kraftbegriff in Verbindung gebracht, um die daraus gewonnenen Gesetz mäßigkeiten mit einfachen Formeln berechnen zu können. Mithilfe des aus den New ton’schen Axiomen abgeleiteten Impulsbegriffs ist es anschließend möglich, die Ge schwindigkeiten von Körpern nach elastischen und inelastischen Stößen zu berech nen. Eine weitere wichtige Größe in der Dynamik ist die Energie, die in diesem Kapitel
96 | 3 Mechanik
am Beispiel der kinetischen und potenziellen sowie der Spannenergie einer Feder be trachtet wird. Die aus dem Quotienten von Energie und Zeit definierte Leistung wird insbesondere dazu verwendet, Rückschlüsse auf die Leistungsfähigkeit des mensch lichen Organismus zu ziehen. Ausgehend von der linearen Bewegung der Translati on werden im nächsten Schritt Drehbewegungen betrachtet und hierbei die Begriffe Drehmoment, Drehimpuls und Trägheitsmoment eingeführt. Das Drehmoment und die daraus resultierende Kraft werden hierbei als wichtige Größe zur Beschreibung von mechanischen Bewegungen des menschlichen Körpers identifiziert. Nach dieser Beschreibung idealer Körper wird zu realen Körpern gewechselt, die durch Dehnung, Torsion oder Scherung elastisch verformt werden können, wobei ebenfalls eine Brü cke zum bereits bekannten Hooke’schen Gesetz geschlagen wird. Zum Schluss werden die in diesem Kapitel hergeleiteten Zusammenhänge auf die Himmelsmechanik über tragen, um zu zeigen, dass sich die Vorgänge im makroskopischen Bereich mithilfe der Mechanik sehr gut beschreiben und vorhersagen lassen. Ausgehend vom New ton’schen Gesetz der Gravitation werden zunächst die beiden kosmischen Geschwin digkeiten und anschließend die Kepler’schen Gesetze behandelt, welche mit den be reits erlangten Grundkenntnissen der Mechanik weitgehend verifiziert können.
Aufgaben Aufg. 3.1: Ein Pkw ist eine Strecke von 105 km gefahren und benötigte hierfür eine Zeit von 1,5 Stunden. Welche Durchschnittsgeschwindigkeit hatte das Auto in m/s unge fähr? Aufg. 3.2: Ein U-Boot sendet einen Sonarpuls aus, um Hindernisse auf seinem Fahr weg zu entdecken. Wie weit ist ein erkanntes Objekt von dem U-Boot entfernt, wenn der Empfänger die Reflexion nach 3 s erfasst? Die Schallgeschwindigkeit in Wasser be trägt 1.500 m/s. Aufg. 3.3: Ein Motorradfahrer benötigt 10 Sekunden, um von 0 auf 80 km/h zu be schleunigen. Welche durchschnittliche Beschleunigung ist hierfür notwendig gewe sen? Aufg. 3.4: Eine Person werfe einen Stein aus einer Höhe von 1,60 m senkrecht nach oben. Die Geschwindigkeit des Steins beim Abwurf betrage 18 km/h. Nach welcher Zeit schlägt dieser auf dem Boden auf? Aufg. 3.5: Ein Kind lasse einen Stein in einen Brunnen fallen. Nach 2,5 s hört man den Aufschlag. Wie tief ist der Brunnen ungefähr (ohne Berücksichtigung der Schalllauf zeit)? Aufg. 3.6: Eine Kugel werde mit einer Anfangsgeschwindigkeit von 5 m/s in einer Höhe von 2 m waagerecht abgeworfen.
Aufgaben | 97
a) Nach welcher Zeit trifft die Kugel auf dem Boden auf? b) Unter welchem Winkel trifft sie auf dem Boden auf? Aufg. 3.7: Ein Diskus wird aus einer Höhe von 1,80 m unter einem Winkel von 40° ab geworfen. Die Anfangsgeschwindigkeit beträgt 25 m/s. a) Wie groß ist die gesamte Flugzeit des Diskus? b) Wie groß ist seine maximale Reichweite? c) An welcher Stelle erreicht der Diskus seine maximale Höhe? Aufg. 3.8: Ein ICE der Masse 600 t besitzt eine Antriebskraft von ca. 300 kN. Wie lange dauert es ungefähr, bis er bei konstanter Beschleunigung aus dem Stand heraus seine Maximalgeschwindigkeit von 306 km/h erreicht hat? Aufg. 3.9: Zwei Personen laufen auf einem Flughafen eine Strecke von 50 m. Bei de laufen mit einer Geschwindigkeit von 1,2 m/s. Eine der Personen läuft auf einem Transportband, das eine Geschwindigkeit von 0,5 m/s besitzt. Mit welcher Zeitdiffe renz kommen beide am Ziel an? Aufg. 3.10: Ein Paddler überquert den Fluss Yukon, dessen Breite an dieser Stelle 2 km beträgt und der von Ost nach West fließt. Er paddelt mit 5 km/h senkrecht zur Fließ richtung nach Norden und wird bis zu seiner Ankunft 3 km nach Westen abgetrieben. Wie groß ist die Fließgeschwindigkeit des Yukon ungefähr? Aufg. 3.11: Ein leerer Transportwagen mit der Masse 5 kg rollt unter einem Füllrohr oh ne Antrieb entlang einer horizontalen Schienenkonstruktion. Seine Geschwindigkeit beträgt 10 m/s. Nachdem er von oben befüllt wurde, ist seine Masse auf 50 kg ange stiegen. Wie groß ist seine Geschwindigkeit jetzt? Aufg. 3.12: Eine Tafel Schokolade mit der Masse 100 g wird von einem Tisch der Höhe 0,7 m in ein Regalfach mit der Höhe 1,5 m gehoben. Welche Energie muss die Person hierfür aufbringen? Aufg. 3.13: Ein Auto mit einer Masse von 1 t fährt beschleunigt aus dem Stand auf eine Geschwindigkeit von 50 km/h. Welche Arbeit muss hierfür von dem Motor mindestens verrichtet werden? Aufg. 3.14: Eine Blumenvase fällt von einer Fensterbank aus einer Höhe von 4 m auf die Straße. Welche Geschwindigkeit hat sie beim Auftreffen? Aufg. 3.15: Ein Auto der Masse 900 kg beschleunigt an einem Hang stehend aus dem Stand in 5,5 s auf eine Geschwindigkeit von 108 km/h. Dabei erreicht das Auto eine zusätzliche Höhe von 10 m. Wie groß muss die Leistung des Motors mindestens sein? Aufg. 3.16: Eine Feder wird mit einem Gewicht der Masse 100 g beschwert. Dabei wird eine Auslenkung von 1 cm gegenüber ihrer Ruhelage gemessen. a) Welchen Wert hat die Federkonstante? b) Wie groß ist die gespeicherte Spannenergie?
98 | 3 Mechanik Aufg. 3.17: Ein Minutenzeiger der Turmuhren des Palace of Westminster in London hat eine Länge von 4,3 m und überstreicht alle 60 Minuten gleiche Positionen. Welche Bahngeschwindigkeit hat die Spitze des Zeigers ungefähr, wenn eine kontinuierliche Drehung angenommen wird? Aufg. 3.18: Ein Lkw mit der Masse 3 t fahre mit einer Geschwindigkeit von 50 km/h in eine Kurve mit einem Radius von 20 m. Wie groß muss die Reibungskraft zwischen Straße und Reifen mindestens sein, damit das Auto nicht aus der Kurve fliegt? Aufg. 3.19: Sie schleudern eine Kugel der Masse 500 g, die an einem Seil der Länge 1 m befestigt wurde, horizontal über Ihrem Kopf durch die Luft. Auf den Faden wirkt eine Zugbelastung von 200 N. Mit welcher Geschwindigkeit und in welche Richtung fliegt die Kugel weg, wenn jetzt das Seil reißt? Aufg. 3.20: Ein Auto mit der Masse 1 t stößt zentral mit einem parkenden Auto der der gleichen Masse zusammen. Die Geschwindigkeit des fahrenden Autos betrage 50 km/h. Während des Stoßes verhaken sich beide Autos ineinander. a) Mit welcher Geschwindigkeit bewegen sich die beiden Pkw nach dem Stoß? b) Wie groß ist die Differenz der kinetischen Energien vor und nach dem Stoß? Aufg. 3.21: Eine Kugel mit der Masse 1 kg rollt mit einer Geschwindigkeit von 3 m/s auf eine ruhende Kugel der Masse 500 g zu. Beide Kugeln stoßen zentral und vollkommen elastisch zusammen. Welche Geschwindigkeit hat die zweite Kugel nach dem Stoß? Aufg. 3.22: Drei Kugeln mit den Massen 1 kg, 10 kg und 25 kg befinden sich in einer Linie 50 m, 30 m und 10 m vom Koordinatenursprung entfernt. Wo befindet sich von diesem Punkt aus gesehen der Schwerpunkt des Systems? Aufg. 3.23: Wie hoch liegt der Schwerpunkt einer Halbkugel mit dem Radius 30 cm? Aufg. 3.24: Nach dem Reifenwechsel sollten die Schrauben mit einem definierten Drehmoment festgezogen werden. Hierzu stehe lediglich ein normaler Schrauben schlüssel zur Verfügung. In welchem Abstand zur Schraube muss sich eine Person mit einer Masse von 70 kg mit ihrem gesamten Gewicht auf den Schlüssel stellen, damit ein Drehmoment von 120 Nm erreicht wird? Aufg. 3.25: Eine Person hält ein Gewicht mit der Masse 10 kg in der Hand. Der Abstand zwischen Gewicht und Ellenbogengelenk betrage 30 cm. Der Arm ist so angewinkelt, dass der Bizeps unter einem Winkel von 30° etwa 5 cm vom Ellenbogen entfernt am Unterarm angreift. Welche Kraft muss der Muskel aufbringen, um das resultierende Drehmoment zu kompensieren? Aufg. 3.26: Zwei Massen mit jeweils 50 kg rotieren mit einer Umdrehungszahl von 60 Umdrehungen pro Minute um ihren gemeinsamen Schwerpunkt. Der Abstand zwi schen den Kugeln und dem Schwerpunkt betrage jeweils 2 m und die Ausdehnung der Kugeln sei zu vernachlässigen. Wie groß ist die Rotationsenergie des Systems?
Aufgaben | 99
Aufg. 3.27: Ein Voll- und ein Hohlzylinder mit der gleichen Masse von 20 kg und einem Radius von 5 cm rollen eine schiefe Ebene herunter. Wie groß ist der Geschwindigkeits unterschied beider Zylinder, nachdem sie eine Höhendifferenz von 10 m überwunden haben? Aufg. 3.28: Zwei Kugeln der Masse 50 kg umkreisen in einem Abstand von 2 m zuein ander mit 10 Umdrehungen pro Minute ihren gemeinsamen Schwerpunkt. Nach eini ger Zeit werden die Kugeln zum Zentrum hin gezogen und der Abstand auf 1 m ver kürzt. Wie viele Umdrehungen pro Minute werden von dem System jetzt ausgeführt. Aufg. 3.29: Zwei Kugeln mit jeweils einer Masse von 5 kg sind mit einem Stab mitein ander verbunden und rotieren um eine Drehachse, die 30 cm von der einen und 70 cm von der anderen Kugel entfernt ist. Die Masse des Stabes sowie die Ausdehnung der Kugeln sollen vernachlässigt werden. Wie groß ist dann das Trägheitsmoment des Sys tems? Aufg. 3.30: Ein Auto fahre auf einer Autobahn mit einer Geschwindigkeit von 120 km/h. Die Fläche, die dem Fahrtwind ausgesetzt ist, betrage 1,5 m2 . Der cW -Wert dieses Typs wurde im Windkanal zu 0,4 bestimmt. Welche Kraft muss der Fahrer durch das Betätigen des Gaspedals ausgleichen, damit sich der Pkw mit konstanter Ge schwindigkeit bewegt? Die Dichte von Luft kann mit 1,2 kg/m3 angenommen werden. Aufg. 3.31: Das Elastizitätsmodul für Knochen beträgt etwa 15 kN/mm2 . Wie groß wä re die aufzubringende Kraft ungefähr, um einen runden Knochen mit einem Durch messer von 10 mm um 0,01 % zu dehnen? Aufg. 3.32: Quarzglas besitzt eine Kompressibilität von 2,6 ⋅ 10−11 Pa−1 . Welcher Druck müsste aufgebracht werden, um das Volumen eines Körpers aus diesem Mate rial um 1 % zu verringern? Aufg. 3.33: Ein Wüfel aus Aluminium mit einer Kantenlänge von 1 cm ist im unteren Bereich fest eingespannt. Auf eine der vertikalen Flächen wirke nun eine Kraft von 10 kN. Welcher Wert ergibt sich für den Scherwinkel, wenn das Schubmodul von Alu minium 25,5 GPa beträgt? Aufg. 3.34: Auf einen Rundstab mit der Länge 10 cm und dem Radius 5 mm aus Kupfer mit einem Schubmodul von 47 GPa wirkt eine Scherkraft von 5 kN. Um welchen Winkel verdrillt sich der Stab? Aufg. 3.35: Die Masse des Mondes beträgt 7.349 ⋅ 1022 kg und sein mittlerer Durch messer 3476 km. Wie groß ist dann der Ortsfaktor nahe der Oberfläche? Aufg. 3.36: Wie groß muss die Geschwindigkeit eines Himmelskörpers auf der Mond umlaufbahn um die Erde sein (Abstand 384.400 km), damit seine Bahn stabil ist? Aufg. 3.37: Wie weit ist das Baryzentrum des Systems Erde-Mond vom Mittelpunkt der Erde entfernt?
4 Schwingungen & Wellen 4.1 Übersicht Dieses Kapitel befasst sich mit der Beschreibung von periodischen Vorgängen in der Natur, die sich als Schwingungen oder Wellen darstellen lassen. Hierzu werden die im letzten Kapitel betrachteten Zusammenhänge zunächst auf mechanische Schwin gungen übertragen und am Beispiel verschiedener Pendel besprochen. Neben diesen idealisierten Vorgängen werden in diesem Abschnitt außerdem gedämpfte und er zwungene Schwingungen behandelt. Im nächsten Schritt werden sich ausbreitende Schwingungen in Form von Wellen betrachtet und eine mathematische Beschreibung dargelegt. Anschließend werden die speziell für medizinische Anwendungen wichti gen akustischen Wellen behandelt, wobei hierbei explizit auf Begriffe wie Schalldruck und Lautstärke eingegangen wird. Der Ultraschall wird dabei noch einmal in Kombi nation mit Sonar und Dopplerultraschall gesondert behandelt.
4.2 Schwingungen Strahlt man, wie auf der linken Seite von Abbildung 4.1 angedeutet, einen an einer rotierenden, runden Platte befestigten Gegenstand seitlich an, dann erhält man die Projektion auf die y-Achse als Schatten an der Wand. Man erkennt eine periodische Auf- und Abbewegung mit der größten Änderung in der Mitte. Der Zusammenhang zwischen der größtmöglichen Auslenkung y0 , die dem Abstand r zwischen dem Ge genstand und der Mitte der Platte entspricht, und der momentanen Position y(t) kann unmittelbar aus Gleichung (3.67) abgelesen werden und ergibt sich zu: y(t) = y0 sin α = y0 sin ωt
(4.1)
Wenn man nun diese Position gegen den jeweiligen Winkel α = ωt aufträgt, dann ergibt sich der in der Abbildung 4.1 abgebildete Graph, der sich als Schwingung um einen Mittelpunkt herum mit der Amplitude y0 interpretieren lässt. Eine derartige Schwingung, die durch eine Sinusfunktion beschrieben werden kann, nennt man har
2
3
3 0 4 5
2
1
1 0 0
2π π 2
6
π 4
3 2π
5
α
6
Abb. 4.1: Eine harmonische Schwingung als Projektion eines sich drehenden Objekts. https://doi.org/10.1515/9783110692921-004
4.2 Schwingungen
| 101
monische Schwingung. Wichtig an dieser Stelle zu erwähnen ist außerdem die Tatsa che, dass man aufgrund der Verwandtschaft beider Winkelfunktionen ebenfalls den Kosinus verwenden kann. Die Schwingung ist dann um 90° phasenverschoben. Wel che der beiden Funktionen benutzt werden muss, hängt von den Anfangsbedingun gen ab. Ist die Auslenkung zum Zeitpunkt t = 0 maximal, dann muss der Kosinus verwendet werden. Ist zu diesem Zeitpunkt hingegen die Geschwindigkeit maximal und die Auslenkung y(t) = 0, dann muss für die korrekte Beschreibung der Sinus verwendet werden.
4.2.1 Pendel 4.2.1.1 Federpendel Betrachten wir nun eine horizontal gelagerte Feder mit einem eingespannten Gegen stand. Ein solcher Aufbau ist in Abbildung 4.2 dargestellt. Setzt man die Formel des Hooke’schen Gesetzes mit der Beziehung des zweiten Newton’schen Axioms gleich, dann erhält man folgende Differenzialgleichung: ̈ = −kx(t) m x(t)
(4.2)
Hierbei wurde die Beschleunigung a direkt durch die zweite Ableitung des Ortes nach der Zeit ersetzt. Man kann eine solche Differenzialgleichung 2. Ordnung auf verschie dene Arten lösen. Die einfachste Variante sind das Finden und Einsetzen einer mögli chen Lösungsfunktion. Es gibt eine Funktion, die bis auf das Vorzeichen identisch mit ihrer 2. Ableitung ist. Hierbei handelt es sich um die Sinusfunktion. Man erkennt da durch sofort, dass es sich bei einer schwingenden Feder um eine harmonische Schwin gung handelt. Setzt man als Ansatz die Funktion x(t) = A sin ωt
(4.3)
in die Differenzialgleichung ein, dann ergibt sich nach zweifachem Ableiten und Um formen für die Kreisfrequenz einer schwingenden Feder: ω=√
k m
(4.4)
Daraus lässt sich mit Gleichung (3.65) die Periodendauer berechnen: T = 2π√
m k
(4.5)
Abb. 4.2: Eine schwingende Masse, die zwischen zwei horizontal aufgehängten Federn befestigt ist.
102 | 4 Schwingungen & Wellen
Entsprechend der o. g. Betrachtung würde auch die Funktion y(t) = A cos ωt
(4.6)
die Differenzialgleichung lösen, wie man leicht herausfinden kann. Deshalb sind bei de Funktionen korrekte Lösungen, die harmonische Schwingungen beschreiben. 4.2.1.2 Fadenpendel Nun betrachten wir eine Masse, die an einem Faden aufgehängt wurde. Lenkt man die se etwas aus und lässt sie dann los, vollführt das Fadenpendel ebenfalls eine Schwin gung. Die Rückstellkraft ist in diesem Fall die Gravitation, die auf den Schwerpunkt des Pendels wirkt. Wir setzen bei der folgenden Herleitung voraus, dass der Faden mit der Länge l eine vernachlässigbare Masse besitzt. Dadurch kann angenommen wer den, dass der Schwerpunkt mit dem aufgehängten Massepunkt zusammenfällt und alle Kräfte dort angreifen wie in Abbildung 4.3 dargestellt. Der Pendelkörper bewegt sich dabei auf der gepunkteten Kreisbahn zwischen den beiden Umkehrpunkten hin und her. Ein solches idealisiertes Pendel wird oft auch als mathematisches Pendel be zeichnet, weil sich die Bewegungsgleichung auf relativ einfache Weise lösen lässt. Die Gewichtskraft F⃗ G lässt sich aufspalten in die Rückstellkraft F⃗ R , die tangential an der Kreisbahn des Pendelkörpers anliegt, und eine Kraftkomponente F⃗ S , die an dem Seil zieht. Während die Länge von F⃗ G immer konstant bleibt, ändern sich die Längen der beiden anderen Vektoren zu jedem Zeitpunkt, da sich der Auslenkungswinkel φ eben falls zeitlich ändert. Die Beschleunigung entlang der Kreisbahn wird durch die Rück ̈ = ml φ(t) ̈ ausdrü stellkraft FR = FG sin φ(t) hervorgerufen und lässt sich durch m x(t) cken. Gleichsetzen ergibt dann folgende Beziehung: ̈ mg sin φ(t) = −ml φ(t)
(4.7)
Analog zum Federpendel erhält man eine Differenzialgleichung, wobei dieses Mal der Winkel φ als Funktion der Zeit gesucht ist. Für kleine Auslenkungen entspricht der Sinus eines Winkels ungefähr dem Winkel selbst, d. h., es gilt sin φ ≈ φ. Setzt man
φ l
l
FR φ FS
FG
Abb. 4.3: Skizze zur Herleitung der Schwingungs dauer eines Fadenpendels als mathematisches Pendel.
4.2 Schwingungen |
103
diese Näherung in Gleichung (4.7) ein, dann ergibt sich: ̈ gφ(t) = −l φ(t)
(4.8)
Diese Differenzialgleichung kann nun wieder mit dem Ansatz einer harmonischen Schwingung φ(t) = A sin(ωt) (4.9) gelöst werden. Durch Einsetzen erhält man für die Kreisfrequenz: ω=√
g l
(4.10)
Erneut lässt sich damit die Periodendauer bestimmen:
T = 2π√
l g
(4.11)
Ohne die oben durchgeführte Kleinwinkelnäherung ist die Differenzialgleichung nicht mehr analytisch lösbar. Stattdessen führt dies zu einer Reihenentwicklung mit un endlich vielen Summanden, die an dieser Stelle nicht angegeben werden soll. Der be rechnete Wert stimmt dann um so genauer mit dem wahren Wert überein, je mehr Summenterme man berücksichtigt. 4.2.1.3 Physikalisches Pendel Die Näherung des unendlich dünnen und masselosen Fadens wird, wie in Abbil dung 4.4 dargestellt, beim physikalischen Pendel fallen gelassen. Stattdessen besitzt die Verbindung zwischen Pendelkörper und Aufhängung A nun eine endliche Dicke
A φ
M
d
SP
FG
Abb. 4.4: Zur Herleitung der Schwingungsdauer bei einem physikalischen Pendel mit endlicher Ausdehnung und Masse.
104 | 4 Schwingungen & Wellen
und Masse. Im allgemeinen Fall handelt es sich um einen dreidimensionalen Pen delkörper mit einer beliebigen Form und einer beliebigen Massenverteilung. Dadurch wandert der Schwerpunkt SP vom Massepunkt am Ende des Fadens um einen be stimmten Betrag in Richtung der Aufhängung des Pendels. Anstelle von Kräften muss nun mit Drehmomenten gerechnet werden. Um die Herleitung etwas zu verkürzen, können wir die Substitutionen gemäß Tabelle 3.3 vornehmen. Aus der Masse m wird dementsprechend ein Trägheitsmoment I und aus der Kraft F ein Drehmoment D. Gleichung (4.7) lässt sich dann schreiben als mgd sin φ = −I φ̈ ,
(4.12)
wobei d den Abstand zwischen Aufhängung und Schwerpunkt bezeichnet. Durch Lö sen der Differenzialgleichung erhält man dann ω=√
mgd I
(4.13)
und damit für die Periodendauer T = 2π√
I mgd
(4.14)
4.2.2 Gedämpfte Schwingungen Alle makroskopischen Schwingungen sind gedämpft. Der Grund hierfür ist die An wesenheit von verschiedenen Reibungsarten. In diesem Abschnitt soll angenommen werden, dass die Reibungskraft selbst von der Geschwindigkeit des Oszillators ab hängt und ihrem Betrag proportional ist. In diesem Fall muss dann zur Gleichung (4.2) ̇ hinzugefügt werden. Damit erhält man folgende Form: noch der Term −b x(t) ̈ = −kx(t) − b x(t) ̇ m x(t)
(4.15)
Dividiert man diese Gleichung noch durch die Masse und bringt alle Terme auf die lin ke Seite, dann erhält man die allgemein übliche Schreibweise für gedämpfte Schwin gungen: ̈ + 2γ x(t) ̇ + ω2 x(t) = 0 x(t) (4.16) Hierbei wurde k/m durch die Resonanzfrequenz ω0 und b/m durch die zweifache (zur besseren Darstellung) Dämpfungskonstante γ ersetzt. Das Lösen dieser Gleichung er fordert ein wenig Erfahrung mit komplexen Zahlen in Zusammenhang mit der e-Funk tion und soll an dieser Stelle nicht näher ausgeführt werden. Wir beschränken uns daher auf Zusammenfassung der folgenden drei Spezialfälle:
4.2 Schwingungen
1.
| 105
Schwache Dämpfung (γ < ω0 ): Die Schwingung ist identisch mit einer harmoni schen Schwingung, deren Amplitude mit der Zeit kleiner wird. Die sich ergebende Funktion lautet: x(t) = Ae−γt sin(ωt)
(4.17)
Die Einhüllende der Amplitude folgt somit einem exponentiellen Abfall. Hierbei ist zu berücksichtigen, dass die Winkelgeschwindigkeit ω des Oszillators ω = √ω20 − γ2
(4.18)
durch das Vorhandensein der Dämpfung von der ursprünglichen Resonanz frequenz ω0 abweicht. Die Frequenzverschiebung steigt mit größer werdender Dämpfungskonstante. Ein Beispiel für eine schwache Dämpfung ist auf der lin ken Seite von Abbildung 4.5 dargestellt. Man erkennt deutlich die abfallende Amplitude. Zur besseren Illustration wurde zusätzlich noch die einhüllende Ex ponentialfunktion als gestrichelte Linie mit eingezeichnet. Ein weiterer wichtiger Begriff soll nun über das Verhältnis x(t + T) = e−γt x(t)
(4.19)
zweier aufeinanderfolgender Amplituden nach der Periodendauer T definiert werden. Logarithmiert man beide Seiten mit dem natürlichen Logarithmus, so erhält man: ln [
2.
(4.20)
Die Größe δ wird als logarithmisches Dekrement bezeichnet. Wichtig zu beachten ist hierbei, dass sich die Periodendauer T auf das gedämpfte System bezieht. Starke Dämpfung (γ > ω0 ): Die Schwingung besteht nur aus einer einzelnen Aus lenkung. Der Oszillator nähert sich danach der Ruheposition an, wird diese aber niemals exakt erreichen. Dieser Fall wird daher auch Kriechfall genannt. Die all gemeine mathematische Beschreibung hierfür lautet: x(t) =
3.
x(t) ] = γT = δ x(t + T)
A −γt e [α cosh(αt) + γ sinh(αt)] , α
(4.21)
wobei α für den Term √γ2 − ω20 steht. Aperiodischer Grenzfall (γ = ω0 ): Dieser Spezialfall wird beispielsweise bei der Konstruktion von Stoßdämpfern angestrebt, weil die Schwingung möglichst schnell zum Stillstand kommen muss. Die Lösungsfunktion kann geschrieben werden als: x(t) = A(1 + γt)e−γt (4.22)
106 | 4 Schwingungen & Wellen
y(t) Aperiodischer Grenzfall Starke Dämpfung
y(t)
t
t
Schwache Dämpfung Abb. 4.5: Eine durch schwache Dämpfung abklingende Amplitude (links) und die momentane Aus lenkung bei verschiedenen Dämpfungsarten (rechts).
Die momentanen Auslenkungen bei allen drei Dämpfungsarten sind auf der rechten Seite von Abbildung 4.5 zum besseren Vergleich in ein Diagramm eingezeichnet wor den. Man erkennt hierbei deutlich, dass lediglich bei der schwachen Dämpfung eine Sinusschwingung vorliegt. Bei den anderen beiden Dämpfungsarten erkennt man nur den exponentiellen Abfall. Obwohl die Amplitude bei der starken Dämpfung schneller abfällt als bei der schwachen Dämpfung, ist der aperiodische Grenzfall die bestmög liche Dämpfung.
4.2.3 Erzwungene Schwingungen Eine erzwungene Schwingung liegt vor, wenn ein Oszillator durch eine äuße re Kraft zum Schwingen angeregt wird. Die angreifende Kraft muss dementspre chend ebenfalls einen periodischen Verlauf besitzen und kann beispielsweise durch F(t) = F0 sin(ωt) beschrieben werden. Da der Oszillator zusätzlich gedämpft sein soll, lässt sich Gleichung (4.16) zu ̈ + 2γ x(t) ̇ + ω2 x(t) = F0 sin ωt m x(t)
(4.23)
erweitern. Wie auch bei den gedämpften Schwingungen, soll an dieser Stelle lediglich die Lösung der Differenzialgleichung angegeben werden, die sich zu A(ω) =
F0 /m √(ω20
(4.24)
− ω2 )2 + (2γω)2
ergibt. Diese Gleichung gilt, nachdem sich das System aus Oszillator und Erreger ein geschwungen hat. Die beiden Werte ω0 und ω bezeichnen hier die Eigenfrequenz des Oszillators und die Anregungsfrequenz. ω0 wird in diesem Fall auch als Resonanzfre quenz des Oszillators bezeichnet. Wichtig sich zu merken ist, dass sich für alle Fre quenzen ω eine konstante Amplitude einstellt. Ein interessanter Fall tritt auf, wenn
4.2 Schwingungen |
107
Resonanz vorliegt und ω = ω0 ist. Dann verschwindet die Differenz im ersten Term des Nenners, sodass die Amplitude maximal wird. Wäre der Oszillator ungedämpft, d. h. γ = 0, dann würde die Amplitude unendlich groß werden, weshalb man hier von einer Resonanzkatastrophe spricht. Beispielsweise bei Brücken kann dies verheerende Wirkungen haben. Hierbei können sich starke Winde und Schwingungen der Brücke gegenseitig beeinflussen, sodass die dabei entstehende Amplitude die Brücke zum Einstürzen bringt. Die Straßenverkehrsordnung untersagt es außerdem, im Gleich schritt über eine Brücke zu laufen, da hierbei im ungünstigsten Fall eine Frequenz nahe dem Resonanzfall getroffen werden kann, was ebenfalls zu einer Beschädigung der Brücke führen kann.
4.2.4 Fourier-Analyse Ein beliebtes Verfahren zur Vereinfachung komplizierter Funktionen um einen gege benen Punkt herum ist deren Entwicklung in Form von Potenzreihen, wobei die Tay lor-Reihe hierbei eine der Bekanntesten ist. Je mehr Glieder einer solchen Potenzreihe berechnet werden, desto genauer wird die Funktion angenähert. Ein weiteres wich tiges Verfahren zur Untersuchung insbesondere von periodischen Funktionen ist die Fourier-Reihe, benannt nach Joseph Fourier, einem französischen Mathematiker. Oh ne an dieser Stelle einen expliziten mathematischen Beweis für diese Behauptung zu erbringen, kann eine Funktion f durch die Summe von harmonischen Schwingungen wie folgt angenähert werden: f(x) ≈
a0 + a1 cos(x) + a2 cos(2x) + ⋅ ⋅ ⋅ + b 1 sin(x) + b 2 sin(2x) + ⋅ ⋅ ⋅ 2
(4.25)
Unter Verwendung des Summenzeichens kann diese Gleichung noch etwas verein fachter dargestellt werden:
f(x) ≈
N a0 + ∑ a n cos(nx) + b n sin(nx) 2 n=1
(4.26)
Für den Grenzfall N → ∞ würde die Fourier-Reihe den Wert von f an jeder Stelle per fekt wiedergeben. In der Praxis bricht man die Reihe allerdings nach N Gliedern ab, wobei N möglichst groß gewählt werden sollte. Man erhält somit die Möglichkeit, eine beliebige Funktion durch eine Grundschwingung und beliebig viele Oberschwingun gen anzunähern. Bevor wir dies an einem Beispiel besprechen, müssen wir zunächst Formeln fin den, mit denen wir die Koeffizienten dieser Reihe berechnen können. Aufgrund der Eigenschaften der Winkelfunktionen Sinus und Kosinus bietet es sich an, die Koeffi zienten über bestimmte Integrale mit den Grenzen −π und π zu definieren. Die Inte gration über alle Winkelfunktionen verschwindet dann nämlich, sodass lediglich die
108 | 4 Schwingungen & Wellen
Konstante a0 übrig bleibt: π
1 a0 = ∫ f(x) dx π
(4.27)
−π
Der Kehrwert von π dient hierbei lediglich der Normierung. Für die anderen Koeffizi enten geht man nun genauso vor. Für alle a n gilt demnach per Definition π
an =
1 ∫ f(x) cos(nx) dx π
(4.28)
−π
und für die Konstanten b n analog dazu π
bn =
1 ∫ f(x) sin(nx) dx π
(4.29)
−π
Die Berechnung einer solchen Fourier-Reihe soll nun am Beispiel einer periodi schen Rechteckfunktion, auch Treppenfunktion genannt, dargestellt werden. Diese soll wie folgt definiert werden: {0 für − π ≤ x ≤ 0 f(x) = { 1 für 0 ≤ x ≤ π {
(4.30)
Vor der Berechnung der Koeffizienten können wir noch ein paar Vereinfachungen durchführen: Verschiebt man die Funktion um den Wert 1/2 nach unten, so erkennt man, dass die sich daraus ergebende Funktion antisymmetrisch ist. Das bedeutet, dass die Konstante a0 gleich 1 ist und die weiteren Koeffizienten a n vollständig ver schwinden. Die Berechnung des Integrals für b n nach Gleichung (4.29) führt zu: bn =
1 − (−1)n πn
(4.31)
Damit ergibt sich insgesamt für die Fourier-Reihe bis zum Glied N: f(x) =
N 1 − (−1)n 1 sin (nx) +∑ 2 n=1 π2 n
(4.32)
Diese Näherungsfunktion ist auf der linken Seite in Abbildung 4.6 für sieben Sum menglieder dargestellt. Man erkennt, dass die Funktion bereits recht gut approximiert wird. Auch erkennt man schon recht gut den sich ergebenden Überschwinger an den Ecken der Funktionen. Dieser wird als Gibbs’sches Phänomen bezeichnet und tritt bei
4.2 Schwingungen | 109
0.6
1
0.4 0.5 0.2 0 −5
0
5
0
2
4
6
8
Abb. 4.6: Eine Treppenfunktion mit zugehöriger Fourier-Reihe für sieben Summenglieder (links) und die Amplituden der sich daraus ergebenden Frequenzen (rechts).
allen Fourier-Reihen auf, solange eine endliche Folge von Gliedern berechnet wird. Man kann derartige Sprungstellen daher nie besser als 10 % annähern, da dieser Wert stets konstant bleibt. Da Sinus und Kosinus bis auf eine Phasenverschiebung von 90° identisch sind, kann die Fourier-Reihe durch die Subtraktion einer Phase φ n , die von Term zu Term unterschiedlich ist, in ihre spektrale Form überführt werden:
f(x) ≈
N A0 + ∑ A n cos(nx − φ n ) 2 n=1
(4.33)
Die sich neu ergebenden Amplituden A n ergeben sich mithilfe des Satzes des Pytha goras wie folgt: A n = √a2n + b 2n
(4.34)
Damit ergibt sich nun die Möglichkeit, die Amplituden in Abhängigkeit der jeweils vorkommenden Frequenz zu schreiben. Für die bereits beschriebene Stufenfunktion ist das entsprechende Frequenzspektrum auf der rechten Seite von Abbildung 4.6 zu sehen. Die berechneten Koeffizienten fallen, wie zuvor hergeleitet wurde, umgekehrt proportional zu n mit steigender Frequenz ab. Die Fourier-Reihe lässt sich unter Verwendung von komplexen Zahlen auch auf nicht periodische Funktionen übertragen. In diesem Fall spricht man von einer Fou rier-Transformation. Es gibt heutzutage viele Algorithmen, mit denen Spektralanaly sen von Signalen in nahezu Echtzeit durchgeführt und dargestellt werden können. Der am häufigsten verwendete Algorithmus heißt schnelle Fourier-Transformation (engl. Fast-Fourier-Transform, Abkürzung FFT) und kann in verschiedenen Programmier sprachen relativ einfach programmiert werden. Damit ist es zum Beispiel möglich, die vorhandenen Frequenzen einer Elektroenzephalografie (EEG) zu analysieren, die durch sich ändernde elektrische Potenzialdifferenzen im Gehirn entstehen. Aus dem
110 | 4 Schwingungen & Wellen
Amplitudenverhältnis der einzelnen Frequenzen kann anschließend zum Beispiel die Wirkungsweise von Medikamenten untersucht werden. Weitere Anwendungsgebiete der Fourier-Analyse sind in der Bildverarbeitung von Analysen im Bereich der Com putertomografie (CT) oder Magnetresonanztomografie (MRT) zu finden. Die korrekte Anwendung der FFT ist allerdings nicht trivial und erfordert einige Kenntnisse im Be reich der Systemtheorie. Hierbei spielen Begriffe wie Padding oder Mittelwertbereini gung eine wichtige Rolle.
4.3 Wellen Eine Schwingung muss nicht an einen Ort gebunden sein, sondern kann sich räumlich ausbreiten. Dies geschieht, wenn es mehrere Oszillatoren gibt, die alle miteinander gekoppelt sind. Beispiele für Wellen sind Schall- und Wasserwellen, wobei die Kopp lung hier durch Kräfte zwischen den Atomen und Molekülen hervorgerufen wird. Bei beiden Typen handelt es sich um mechanische Wellen, die ein Medium benötigen, in dem sie sich ausbreiten, also Luft und Wasser. Im Gegensatz dazu gibt es allerdings auch Wellen, die sich im Vakuum ausbreiten können. Ein bekanntes Beispiel hierfür sind die elektromagnetischen Wellen, die sich durch ständiges Erzeugen von elektri schen und magnetischen Feldern aufrechterhalten. Diese Wellenart wird im späteren Verlauf behandelt. Man kann Wellen mithilfe einer sogenannten Wellenmaschine sichtbar machen. Hierbei handelt es sich um einen Aufbau mit vielen Oszillatoren, die miteinander ge koppelt sind. Bewegt man einen dieser Oszillatoren auf und ab, so breitet sich die ent stehende Schwingung entlang der Anordnung aus – man erhält eine Welle. Man kann zum Sichtbarmachen einer mechanischen Welle ebenfalls ein Seil an einer Wand be festigen und anschließend kurzzeitig schnell auslenken. Die so entstehende Störung bewegt sich dann entlang des Seils, bis sie auf die Wand trifft. Die Wand kann als festes Ende angesehen werden, auf das von der ankommenden Welle eine Kraft aus geübt wird. Bedingt durch das dritte Newton’sche Axiom muss dann auf das Seil die gleich große Gegenkraft wirken. Dies hat zur Folge, dass sich die Richtung der Auslen kung umkehrt und die Welle somit einen Phasensprung von 180° beziehungsweise π/2 machen. Wir werden später noch weitere Beispiele betrachten, bei denen ein sol cher Phasensprung stattfindet. Bei einem offenen Ende gibt es diesen Phasensprung nicht. Zeigen lässt sich dies mit einem Seil, das von einem erhöhten Punkt nach un ten hängt. Wird dann eine sich ausbreitende Welle erzeugt, so läuft sie mit derselben Ausbreitungsrichtung wieder zurück zum Erzeuger.
4.3 Wellen | 111
4.3.1 Wellenfunktion Die Ausbreitung von Wellen wird mithilfe der sogenannten Wellenfunktion beschrie ben. Ihre einfachste Form soll nun wie folgt hergeleitet werden: Zunächst betrach ten wir einen Oszillator in einem Medium, der um seine Ruhelage herum eine har monische Schwingung ausführt. Eine Welle entsteht genau dann, wenn die Oszillato ren miteinander gekoppelt sind und die Schwingung auf seine Nachbarn übertragen wird, wobei diese dort zeitverzögert einsetzt, da sich die Welle mit einer endlichen Geschwindigkeit c ausbreitet. Zur korrekten Beschreibung einer Welle benötigt man demzufolge die allgemeine Schwingungsfunktion mit einem zusätzlichen Term in der trigonometrischen Funktion, der die räumliche Ausdehnung berücksichtigt. Für die momentane Auslenkung an einem bestimmten Ort x zu einer bestimmten Zeit t ergibt sich folglich: x (4.35) y(x, t) = A sin (ω (t − )) c Diese Funktion, die generell zur Beschreibung aller harmonischen Wellen verwendet werden kann, hängt anders als die bisher kennengelernten Funktionen von zwei Va riablen ab: dem Ort x und der Zeit t. Man muss die momentane Auslenkung y(x, t) deshalb in zwei unabhängigen Graphen darstellen. Der Graph auf der linken Seite von Abbildung 4.7 stellt den zeitlichen Verlauf der Schwingung eines Oszillators an einer festen Koordinate x dar. Auch hier bezeichnet T die Periodendauer dieser Schwingung als zeitlichen Abstand zwischen zwei Perioden. Im nächsten Schritt wird der Zeitpunkt t festgehalten und, wie die rechte Seite von Abbildung 4.7 zeigt, die Abhängigkeit der Auslenkung vom Ort x gezeichnet. Auch hierbei erhält man gemäß Wellenfunktion eine periodische Funktion in Form einer Si nus- beziehungsweise Kosinuskurve. Der räumliche Abstand zwischen zwei Perioden wird hierbei Wellenlänge genannt und mit λ bezeichnet. y(t)
y(x )
x
t
T
λ
Abb. 4.7: Zwei unabhängige Darstellungen einer Wellenfunktion in Abhängigkeit der Zeit und des Ortes.
112 | 4 Schwingungen & Wellen
In der Zeit T hat sich die Welle um eine Wellenlänge λ weiterbewegt. Ersetzt man in Gleichung (3.1) die Strecke s durch λ und die Zeit t durch T, dann ergibt sich die Ausbreitungsgeschwindigkeit c aus dem Produkt der Wellenlänge und der Frequenz: c=
λ = fλ T
(4.36)
Einsetzen in die Wellenfunktion liefert dann die in der Literatur am häufigsten zu fin dende Formulierung: y(x, t) = A sin(ωt − kx)
(4.37)
Die Konstante k bezeichnet die Wellenzahl, welche analog zur Kreisfrequenz als k=
2π λ
(4.38)
definiert ist. Damit kann die Ausbreitungsgeschwindigkeit ebenfalls als c = ωk
(4.39)
angegeben werden. Leitet man die Wellenfunktion zweimal sowohl nach dem Ort als auch der Zeit ab, dann erhält man für beide Ableitungen: ∂2 y = ω2 A sin(ωt − kx) ∂t2 ∂2 y = k 2 A sin(ωt − kx) ∂x2
(4.40) (4.41)
Hierbei wurde das einfache d durch ∂ ersetzt, um deutlich zu machen, dass die Ablei tung nach einer von mehreren Variablen geschieht. Mathematisch betrachtet handelt es sich aber um denselben Operator. Dividiert man beide Gleichungen durch ω2 , dann sind die sich ergebenden Gleichungen unter Verwendung von Gleichung (4.39) iden tisch, d. h., es ergibt sich für die Differenz: ∂2 y 1 ∂2 y − 2 2 =0 2 ∂t c ∂t
(4.42)
Mit dieser sogenannten Wellengleichung lässt sich die Ausbreitung beliebiger Wellen mathematisch beschreiben.
4.3 Wellen
| 113
4.3.2 Schwebung Wenn sich zwei Schwingungen mit ähnlicher Frequenz überlagern, dann entsteht ei ne sogenannte Schwebung. Zur Vereinfachung sei angenommen, dass die Amplitude beider Frequenzen gleich groß ist. In diesem Fall lassen sich die beiden Schwingungs gleichungen wie folgt aufschreiben: y1 (t) = A sin(2πf1 t)
(4.43)
y2 (t) = A sin(2πf2 t)
(4.44)
Anstelle der Winkelfrequenz ω wurde die Frequenz f zur Beschreibung der Schwin gungen verwendet, da diese im Gegensatz zur Kreisfrequenz intuitiver erfasst werden kann. Überlagern sich beide Wellen, dann ergibt die Summe aus beiden Auslenkun gen zu jedem Zeitpunkt t: y(t) = y1 (t) + y2 (t) = A(sin(2πf1 t) + sin(2πf2 t))
(4.45) (4.46)
Aus den Additionstheoremen lässt sich relativ einfach folgender Zusammenhang für die Summe zweier Sinusfunktionen ableiten: sin a + sin b = 2 sin (
a+b a−b ) cos ( ) 2 2
(4.47)
Unter Verwendung dieses Zusammenhangs kann man die Summe der Auslenkungen wie folgt umschreiben: y(t) = 2A sin (2π
f1 + f2 f1 − f2 t) cos (2π t) 2 2
(4.48)
Man erhält dadurch ein Produkt aus zwei trigonometrischen Funktionen. Die Sinus funktion im ersten Term beinhaltet den Mittelwert der beiden Frequenzen f1 und f2 : f̄ =
f1 + f2 2
(4.49)
Im zweiten Term taucht die Differenz ∆f =
f1 − f2 2
(4.50)
der beiden Frequenzen f1 und f2 auf, die auch als Schwebungsfrequenz bezeichnet wird. Mit dieser Vereinfachung lässt sich schreiben: y(t) = 2A sin(2π f ̄ t) cos(2π∆ft)
(4.51)
114 | 4 Schwingungen & Wellen
y(t)
t
Abb. 4.8: Zeitlicher Verlauf einer Überlagerung zweier Schwingungen mit leicht unterschiedlichen Frequenzen. Die einhüllende Schwingung wurde durch die gestrichelte Linie dargestellt und wird bei akustischen Schwingungen als Lautstärkeschwankung wahrgenommen.
Man erkennt hierbei, dass die Schwebungsfrequenz umso größer wird, je weiter die beiden Frequenzen f1 und f2 voneinander abweichen. Der zeitliche Verlauf dieser Funktion für leicht unterschiedliche Frequenzen ist in Abbildung 4.8 dargestellt. Die Frequenz der Hauptschwingung ergibt sich durch den Mittelwert f der beiden Fre quenzen. Die Einhüllende, welche hier als gestrichelte Linie dargestellt wurde, ist identisch mit der Schwebungsfrequenz ∆f .
Experiment: Schwebung mit Stimmgabeln Das Phänomen der Schwebung lässt sich eindrucksvoll mithilfe zweier identischer Stimmgabeln deutlich machen, die beide zur besseren Wahrnehmung in Resonanzkörpern eingefasst sind. Ei ne der beiden Stimmgabeln wird durch ein angebrachtes Gewicht leicht verstimmt, sodass deren Frequenz etwas von der der anderen Stimmgabel abweicht. Zunächst wird die Stimmgabel ohne Gewicht mit einem Hammer angeschlagen, sodass der bekannte Kammerton mit 440 Hz ertönt. Kurze Zeit später wird die verstimmte Stimmgabel angeschlagen, deren Frequenz einige Hertz vom Kammerton abweicht. Man hört sehr gut, dass die Lautstärke periodisch zu- und wieder abnimmt. Durch ein Verschieben des Gewichts kann die Schwebungsfrequenz verändert werden. Außerdem lässt sich der sich ergebende Ton mit einem Mikrofon und einem Oszilloskop sichtbar machen. Sowohl die Schwingung selbst wie auch die Veränderung der Amplitude sind dabei deutlich zu erkennen.
4.3.3 Stehende Wellen Stehende Wellen entstehen dann, wenn zwei gegenläufige Wellen mit gleicher Fre quenz und Amplitude aufeinandertreffen. Die Überlagerung der Wellen in jedem einzelnen Punkt nennt man Interferenz. Diese kann man mathematisch wie folgt beschreiben: Aus der Wellenfunktion ergibt sich unmittelbar die Funktion zur Be
4.3 Wellen |
115
schreibung der Welle, die in positiver x-Richtung verläuft: y1 (x, t) = A sin(kx − ωt)
(4.52)
Die gegenläufige Welle in negativer x-Richtung ergibt sich dann zu: y2 (x, t) = A sin(kx + ωt)
(4.53)
Da sich die Auslenkungen zu jedem Zeitpunkt addieren, kann die Summe geschrieben werden als: y(x, t) = y1 (x, t) + y2 (x, t)
(4.54)
= A (sin(kx − ωt) + sin(kx + ωt))
(4.55)
An dieser Stelle können wir erneut das bereits verwendete Additionstheorem aus Glei chung (4.45) verwenden und die Summe wie folgt umschreiben: y(x, t) = 2A sin(kx) cos(ωt)
(4.56)
Der Graph dieser Funktion ist in Abbildung 4.9 eingezeichnet. Die drei unterschied lich dargestellten Linien repräsentieren die Auslenkung jeweils zu einem bestimmten Zeitpunkt t. Die Funktion beschreibt damit eine Welle, die zwar weiterhin von x und t abhängt, sich aber nicht mehr im Raum ausbreitet. Vielmehr können Zeit und Ort und nun unabhängig voneinander betrachtet werden. Es handelt sich um eine stationäre Schwingung an jeder Stelle x. Man spricht daher in diesem Zusammenhang von einer stehenden Welle. Diese Art von Wellen zeichnet sich dadurch aus, dass es Orte mit ma ximaler Schwingungsamplitude gibt, die als Schwingungsbäuche bezeichnet werden. An anderen Stellen, die Schwingungsknoten genannt werden, geht die zeitliche Aus lenkung gegen 0. Der Abstand zwischen zwei Bäuchen beziehungsweise zwei Knoten y(t)
t
Abb. 4.9: Eine stehende Welle an einem bestimmten Ort für drei verschiedene Zeitpunkte. Die Berei che zwischen den Knoten und Bäuchen bewegen sich auf und ab, wohingegen an den Knoten selbst keine Bewegung stattfindet.
116 | 4 Schwingungen & Wellen
beträgt dabei immer λ/4, d. h. ein Viertel der Wellenlänge der sich überlagernden Welle. Stehende Wellen treten auch im Alltag auf. In Blasinstrumenten beispielswei se werden damit Töne bestimmter Frequenz erzeugt, wie im Folgenden am Beispiel von Orgelpfeifen diskutiert werden soll. Diese besitzen am Luftauslass meistens eine Schneide oder Zunge. Durch die Luftverwirblungen werden im Innern der Pfeife ste hende Wellen erzeugt. Die beiden Enden der Pfeife können dabei in guter Näherung als offen angesehen werden. Daher muss an diesen Stellen jeweils ein Wellenbauch vorliegen. Somit muss die Länge der Pfeife gleich einem Vielfachen der halben Wel lenlänge sein, die mit dieser erzeugt werden soll: l = (n + 1)
λ 2
(4.57)
Die Schwingung für n = 0 wird Grundton oder Grundschwingung genannt, wohin gegen Schwingungen mit größeren n als Obertöne oder Oberschwingungen bezeichnet werden. Um weitere Grundschwingungen mit anderen Frequenzen erzeugen zu kön nen, werden einige Pfeifen auch am oberen Ende geschlossen und man erhält eine sogenannte gedeckte Pfeife. Dort muss dann ein Wellenknoten vorliegen, während am offenen Ende weiterhin ein Wellenberg existiert. Die Länge der Pfeife muss daher um ein Viertel der Wellenlänge verkürzt werden: l = (2n − 1)
λ 4
(4.58)
Einige dieser Grund- und Obertöne für offene und gedeckte Pfeifen sind in Abbil dung 4.10 abgebildet. Reine Sinustöne, die sehr steril klingen, kommen in der Natur
Abb. 4.10: Beispiele für stehende Wellen in Orgelpfeifen mit offenem und geschlossenem Ende.
4.3 Wellen
| 117
Abb. 4.11: Schokolade nach dem Erhitzen in einer Mikrowelle. Die Wellenbäuche der sich bildenden stehenden Wellen sind gut zu er kennen und wurden in diesem Bild zusätzlich mit farbigen Kreisen markiert. Experiment: Stehende Mikrowellen Entfernt man den Drehteller eines Mikrowellenherdes und legt dann eine Tafel Schokolade hin ein, so bilden sich Stellen, an denen die Schokolade schneller schmilzt, da sich hier die Bäuche der stehenden Wellen befinden und die Intensität hier demzufolge den größten Wert annimmt (Abbildung 4.11). Wenn man jetzt den Abstand dieser Stellen misst und anschließend mit dem Faktor 2 multipliziert, dann erhält man die Wellenlänge der Strahlung. Diese lässt sich nun mit der Frequenz, die in der Regel auf dem Mikrowellenherd aufgedruckt ist, multiplizieren, sodass man aus dem Produkt der beiden Zahlen auf einfache Weise die Lichtgeschwindigkeit ausrechnen kann.
Abb. 4.12: Stehende Schallwellen in einem Kundt’schen Rohr mit Korkmehl sichtbar gemacht. Experiment: Kundt’sches Rohr In einem horizontal gelagerten Glasrohr, das auf einer Seite geöffnet ist, befindet sich gleichmäßig verteiltes Korkmehl. An der offenen Seite kann mit einem Lautsprecher Schall einer bestimmten Frequenz erzeugt werden. Auf der geschlossenen Seite befindet sich eine Durchführung, mit deren Hilfe ein Stempel im Rohr verschoben werden kann, sodass die Länge der entstehenden Luftsäule verändert werden kann. Hat man eine Länge erreicht, die ein Vielfaches der halben Wellenlänge minus einem Viertel der Wellenlänge entspricht, so entsteht eine stehende Welle. An den Wellen knoten entstehen dann Häufungen des Korkmehls (Abbildung 4.12). Bestimmt man den mittleren Abstand dieser Häufungen, lässt sich die Schallgeschwindigkeit in Luft oder einem anderen Gas relativ exakt bestimmen.
118 | 4 Schwingungen & Wellen
praktisch nicht vor. Stattdessen beobachtet man immer eine Überlagerung mit mehre ren Obertönen in verschiedenen Intensitäten. Diese verleihen dem Ton die charakte ristische Klangfarbe. Aus diesem Grund hören sich beispielsweise eine Geige und ein Klavier vollkommen unterschiedlich an, obwohl auf ihnen derselbe Grundton gespielt wird. Auch menschliche Stimmen unterscheiden sich zum Teil stark voneinander, was maßgeblich auf unterschiedliche Formen des Vokaltraktes zurückzuführen ist. Stehende Wellen treten auch bei Saiteninstrumenten auf. Eine fest eingespannte Gitarrensaite zum Beispiel weist Knoten und Bäuche auf, wobei sich an den Orten, an denen die Saite eingespannt ist, immer ein Knoten befinden muss, da die Saite hier nicht frei schwingen kann. Probleme bereiten stehende Wellen allerdings in einer Mikrowelle. Weil die elektromagnetischen Wellen an den Wänden reflektiert werden, überlagern sie sich gegenseitig, sodass sich stehende Wellen mit Bereichen großer und nahezu verschwindenden Feldstärken ergeben. Aus diesem Grund werden in moder nen Mikrowellen stets Drehteller eingesetzt, die dafür sorgen, dass die zu erwärmende Nahrung gleichmäßig erhitzt wird.
4.3.4 Akustische Wellen Schallwellen entstehen, wenn das Medium, in dem sie sich ausbreiten, zum Schwin gen angeregt wird. Das menschliche Gehör ist dabei so ausgelegt, dass es Frequenzen zwischen etwa 16 Hz und 20 kHz wahrnehmen kann. Die obere Grenze variiert zwi schen verschiedenen Menschen jedoch zum Teil deutlich und hängt stark vom Alter der Person. Niedrigere Frequenzen entsprechen dabei sehr tiefen Tönen, wohingegen große Frequenzen hohen Tönen entsprechen. Die niedrigste Note, die mit einem mo dernen Klavier gespielt werden kann, ist das A2 mit einer Frequenz von 27,5 Hz. Die höchste Note ist in der Regel das c5 , welches eine Frequenz von 4186,01 Hz besitzt. Das oben genannte Frequenzintervall wird daher auch als Hörschall bezeichnet. Aufgrund zunehmender Trägheit des Ohres nimmt die höchste wahrnehmbare Fre quenz im Laufe des Alterns immer weiter ab. Die Frequenzen unterhalb des Hörschalls nennt man Infraschall. Er kann zwar nicht direkt mit dem Ohr wahrgenommen wer den, sondern lediglich mithilfe technischer Hilfsmittel dargestellt werden. Untersu chungen zeigen jedoch, dass der Mensch durchaus in der Lage ist, Infraschall speziell bei hohen Intensitäten durch ein Gefühl des Unbehagens physisch wahrzunehmen. Oberhalb der Hörgrenze liegt der Ultraschall. Darüber hinaus, ab einer Frequenz von etwa einem Gigahertz, spricht man vom sogenannten Giga- oder Hyperschall. Dieser Bereich ist in der Regel für Physiker und Materialwissenschaftler interessant, um da mit beispielsweise Eigenschaften von Kristallen zu untersuchen. Schallwellen in Gasen und Flüssigkeiten sind Longitudinalwellen. Es handelt sich daher um kleinste Schwankungen von Druck und Dichte in Ausbreitungsrichtung der Welle. In Festkörpern kann zusätzlich noch eine transversale Komponente auftreten, da die Teilchen dort eng miteinander verbunden sind. Der Schall, den wir im All
4.3 Wellen |
119
tag wahrnehmen, breitet sich allerdings fast ausschließlich in der Luft aus. Im Ver gleich zum vorherrschenden Atmosphärendruck sind diese Druckänderungen aller dings vernachlässigbar und außer durch das sehr sensitive Gehör nicht wahrzuneh men. Das Ohr muss allerdings nicht nur kleine Druckschwankungen wahrnehmen können, sondern ebenfalls einen großen dynamischen Bereich von Schalldrücken. Die Hörschwelle liegt bei etwa 20 μPa, wohingegen die ersten Schädigungen des Ge hörs bei etwa 20 Pa zu erwarten sind, also etwa 6 Größenordnungen höher. Um diesen großen Bereich wahrnehmen zu können, folgt die Schallempfindung in etwa einer lo garithmischen Kurve, d. h., sowohl sehr kleine als auch sehr große Schalldrücke sind weitgehend unverzerrt wahrnehmbar. Um dieser Besonderheit des Gehörs Rechnung zu tragen, hat sich in der Wissenschaft und Medizin die Einheit Bell (B) beziehungs weise der zehnte Teil davon, das sogenannte Dezibel (dB), 1 dB =
1 B 10
(4.59)
für den Schalldruckpegel durchgesetzt. Dieser ist definiert als der dekadische Loga rithmus des Verhältnisses zweier Leistungen oder Intensitäten: Q[B] = lg
I2 I1
(4.60)
Für den Schalldruckpegel in Dezibel ergibt sich daher entsprechend: Q[dB] = 10 lg
I2 I1
(4.61)
Man kann zeigen, dass die Schallintensität I proportional zum Quadrat des Schalldru ckes p ist. Weiterhin hat es sich als nützlich erwiesen, für I1 im Nenner des Bruches die Hörschwelle als Referenzwert I0 zu verwenden. Der zugehörige Schalldruckpegel kann dann unter Verwendung der Logarithmengesetze wie folgt geschrieben werden: L p [dB] = 20 lg
p p0
(4.62)
Für p0 muss dann der Wert 20 μPa und für p der gemessene Schalldruck eingesetzt werden. Für kleine Schalldrücke nimmt der Pegel aufgrund des logarithmischen Zusam menhangs recht schnell hohe Werte an. So erzeugen bereits die normalen Geräusche der Lunge beim Atmen einen Schalldruck von etwa 10 dB, obwohl der Schalldruck lediglich 60 bis 70 μPa groß ist. Auf der anderen Seite liegt die Schmerzgrenze bei etwa 100 Pa in unmittelbarer Nähe zum Ohr, was einem Schalldruckpegel von et wa 134 dB entspricht. Der wahrnehmbare Schallpegel ändert sich daher lediglich um 2 Größenordnungen, während der Schalldruck selbst um fast 9 Zehnerpotenzen
120 | 4 Schwingungen & Wellen
Schalldruckpegel [dB]
angestiegen ist. Zur Messung des Schalldruckpegels und Klärung von rechtlichen Fra gen, beispielsweise bei Lärmbelästigungen, gibt es spezielle Messgeräte, die je nach Preisklasse unterschiedliche Genauigkeiten besitzen. Da ein Mikrofon lediglich den Schalldruck messen kann, muss der Schalldruckpegel anschließend mithilfe geeig neter Algorithmen daraus berechnet werden. Wichtig zu wissen ist, dass im Falle von zwei Schallquellen, die im nahen Umfeld vorhanden sind, nicht die Schalldruckpe gel, sondern die Schallintensitäten addiert werden müssen. Die sich ergebende Zahl kann anschließend logarithmiert werden. Der wahrgenommene Schalldruckpegel ist nicht über das gesamte Spektrum kon stant, sondern variiert für verschiedene Frequenzen, wie in Abbildung 4.13 gezeigt wird. Jede Linie repräsentiert einen bestimmten Lautstärkepegel, wobei die doppelt logarithmische Darstellung zu beachten ist. Der Lautstärkepegel wird in der Einheit Phon (phon) gemessen und bezieht sich als Referenz auf den Schalldruckpegel eines reinen Sinustons bei 1000 Hz. Bei dieser Frequenz entspricht der Lautstärkepegel ex akt dem Schalldruckpegel. Die hier abgebildeten Graphen geben dementsprechend an, wie sich der Schalldruck bei einer gegebenen Frequenz verändern muss, damit dieselbe Lautstärke erzielt wird. Das Minimum liegt je nach Lautstärke etwa zwischen 2 und 5 kHz. Für größere oder kleinere Frequenzen steigt die Funktion schnell an, so dass auch der Schalldruckpegel ansteigen muss, damit der subjektiv wahrgenommene Lautstärkepegel konstant bleibt.
100
50
0 102
103 Frequenz [Hz]
104
Abb. 4.13: Die wahrgenommenen Schallpegel in Abhängigkeit der Frequenz für jeweils identische Lautstärkepegel. Die oberste Linie entspricht einem Lautstärkepegel von 100 phon. Die Linien dar unter sind jeweils um 20 phon abgestuft, wohingegen die untersten beiden Linien einen Lautstärke pegel von 10 bzw. 3 phon beschreiben.
4.3 Wellen |
121
4.3.5 Dopplereffekt Der Dopplereffekt kommt im Alltag ebenfalls sehr häufig vor, wird aber aus Gründen von Gewöhnung meist nicht besonders beachtet. Ein häufig genanntes Beispiel im Zu sammenhang mit dem Dopplereffekt ist die Sirene eines Krankenwagens, die Schall wellen mit einer bestimmten Frequenz und Wellenlänge ausstößt. Die Schallwellen breiten sich dabei immer mit der Schallgeschwindigkeit in Luft aus. Fährt nun ein Krankenwagen auf eine Person zu, dann klingt der Ton der Sirene für diese Person höher. Wenn der Krankenwagen an der Person vorbeigefahren ist und sich anschlie ßend von ihr entfernt, nimmt die Frequenz der Schallwellen wieder ab und der Ton klingt tiefer. In diesem Beispiel ruht der Empfänger und die Quelle, also der Kranken wagen, bewegt sich. Ein anderes Beispiel mit einer ruhenden Quelle und einem be wegten Empfänger ist ein beschrankter Bahnübergang mit akustischem Signalgeber. Für die Insassen im Zug klingt der erzeugte Ton höher, wenn sich der Zug in Richtung des Bahnüberganges bewegt. Nach dem Passieren der Quelle verändert sich die Ton höhe zu einem tieferen Ton. Beide Fälle sind in Abbildung 4.14 skizziert. Auf der lin ken Seite bewegt sich die Quelle vom Empfänger weg, was zu einer Vergrößerung der Wellenlänge führt. Auf der rechten Seite ruht die Quelle hingegen und der Emfpänger bewegt sich auf die Quelle zu, sodass sich eine Vergrößerung der Frequenz ergibt. Diese Zusammenhänge sollen nun am Beispiel der bewegten Quelle mathema tisch genauer betrachtet werden. Im Falle des Krankenwagens bewegt sich der Laut sprecher durch das ruhende Medium Luft, sodass die ausgesendeten Wellen mit der Wellenlänge λ etwas gestaucht werden. Der ruhende Beobachter am Straßenrand hört dann einen Ton mit der Wellenlänge λ : λ = λ − ∆λ
(4.63)
Der Abstand ∆λ ergibt sich aus dem Verhältnis der Geschwindigkeiten v des Senders und c der Ausbreitung der Schallwellen. Damit lässt sich schreiben: λ = λ −
v
Q
E
v λ c
Q
(4.64)
v
E
Abb. 4.14: Illustration des Dopplereffekts für eine bewegte Quelle Q (links) und einen bewegten Empfänger E (rechts).
122 | 4 Schwingungen & Wellen
Möchte man stattdessen die Frequenz berechnen, lässt sich der Zusammenhang aus Gleichung (4.36) verwenden. Damit ergibt sich für die gemessene Frequenz durch ei nen ruhenden Beobachter: c c f = = (4.65) λ λ − vc λ Durch das Ausklammern von λ und erneutes Einsetzen der Gleichung (4.36) erhält man: f f = (4.66) 1 − vc Falls sich die Quelle vom Empfänger wegbewegt, muss v durch −v ersetzt werden. Somit erhält man insgesamt für die beobachtete Frequenz bei einer bewegten Quelle und einem ruhenden Empfänger: fQ =
f 1∓
(4.67)
v c
Wenn die Quelle ruht und sich der Empfänger bewegt, dann bleibt die Wellenlänge konstant. Der Beobachter misst hingegen eine Verschiebung der Frequenz, die sich wie folgt berechnen lässt: v+c (4.68) f = λ Wenn sich der Beobachter in Richtung der Quelle bewegt, muss die Geschwindigkeit v demzufolge zu der Ausbreitungsgeschwindigkeit c addiert werden. Dieser Zusammen hang kann erneut mit Gleichung (4.36) in die folgende Form überführt werden: f = f
c+v c
(4.69)
Kürzt man c heraus und berücksichtigt man, dass bei einem sich von der Quelle entfer nenden Empfänger ein negatives v eingesetzt werden muss, dann erhält man letztlich folgende Form: v fE = f (1 ± ) c
,
(4.70)
wobei v die Relativgeschwindigkeit zwischen beiden Objekten ist. Für den Fall, dass sich sowohl die Quelle als auch der Empfänger bewegen, kann man beide Gleichungen miteinander kombinieren. Als Ergebnis erhält man dann für zwei sich aufeinander zu bewegende Objekte die Relation: fQE =f
c + vE c − vQ
(4.71)
Hier ist vE die Geschwindigkeit des Empfängers und vQ die Geschwindigkeit der Quel le. Falls sich beide Objekte voneinander entfernen, erhält v erneut ein negatives Vor zeichen.
4.3 Wellen | 123
c θ
v 0
1
2
3
4
Abb. 4.15: Skizze Herleitung des Öffnungswinkels eines Mach’schen Kegels.
Betrachten wir nun den Fall, dass sich die Quelle auf den Beobachter zubewegt. Sobald die Geschwindigkeit der Quelle gleich der Ausbreitungsgeschwindigkeit der Welle ist, tritt eine Singularität auf, da der Bruch unendlich groß wird. Physikalisch bedeutet dies, dass die Quelle eine Wellenfront vor sich her schiebt, die von einem ruhenden Beobachter als lauter Knall wahrgenommen wird, der Überschallknall ge nannt wird. Überschallflugzeuge erzeugen häufig einen solchen Knall, wenn sie die Schallmauer durchbrechen, d. h., ihre Geschwindigkeit kurzzeitig gleich der Schall geschwindigkeit ist. Die entstehende Schockwelle wird zwar als einzelner Knall wahr genommen, breitet sich jedoch kegelförmig hinter der Quelle aus. Dieser wird auch Mach’scher Kegel genannt. Je weiter die Geschwindigkeit über der Schallgeschwindig keit liegt, desto enger wird der Kegel. Die Berechnung des Öffnungswinkels kann hier bei aus Abbildung 4.15 abgeleitet werden. Die Skizze zeigt ein Objekt, das sich mit der Geschwindigkeit v⃗ entlang der x-Achse bewegt. An jedem Punkt hinter dem Objekt werden kugelförmige Schallwellen ausgestrahlt. Die Wellenfront des Mach’schen Ke gels ergibt sich dann aus der Überlagerung aller Kugelwellen zu einem bestimmten Zeitpunkt. Die Schallwellen breiten sich deshalb senkrecht zur Wellenfront aus. Der halbe Öffnungswinkel θ ergibt sich dann direkt aus der Abbildung zu: sin θ =
c v
(4.72)
Ein ähnlicher Effekt tritt auf, wenn schnelle, geladene Teilchen durch ein transparen tes Medium fliegen. Ist die Geschwindigkeit des Teilchens schneller als die Lichtge schwindigkeit in dem Material, bildet sich analog zum Überschallflugzeug ein Che renkov-Kegel aus Licht aus. Dies kann zum Beispiel beim Hochfahren von Kernkraft werksreaktoren im Kühlwasser beobachtet werden.
124 | 4 Schwingungen & Wellen
4.3.6 Ultraschall und Sonar Ultraschall besitzt sowohl in der Technik als auch in der Medizin ein breites Anwen dungsgebiet. Beispielsweise können Gewässer mithilfe des Echolots kartografiert oder Fischbestände gefunden werden. Vereinfacht ausgedrückt sendet ein Schiff hierbei Ultraschallwellen aus, die nach dem Passieren des darunterliegenden Wasservolu mens auf einen festen Untergrund stoßen und von diesem weitgehend reflektiert wer den. Aus der relativ konstanten Schallgeschwindigkeit im Wasser kann anschließend aus der Messung der Zeitdifferenz ∆t zwischen ausgesendetem und empfangenem Si gnal die Entfernung ∆s zum Meeresgrund bestimmt werden. Bei der Berechnung der Wegstrecke ist allerdings zu beachten, dass der Schall aufgrund seiner Reflexion die doppelte Wegstrecke zurücklegen muss. Für die Laufzeit gilt daher die Formel: ∆t =
2∆s c
(4.73)
In der Medizin hat sich die Sonografie als bildgebendes Verfahren parallel zur Röntgenanalyse entwickelt. Mit ihrer Hilfe können Organe wie Leber und Gehirn, Kno chen oder sogar mittels Echokardiografie das Herz untersucht werden. Die Funktions weise ist bei allen Verfahren weitgehend identisch. Zunächst benötigt man einen Ul traschallsender, der in einem Sensorkopf untergebracht ist. Dieser besteht meistens aus einem Piezokristall, der durch Anlegen einer Wechselspannung zu hochfrequen ten Eigenschwingungen angeregt wird. Dieselben Kristalle können ebenfalls als Emp fänger eingesetzt werden, indem sie durch die Schallwellen zum Schwingen angeregt werden und dadurch elektrische Signale erzeugen, welche mit Verstärkern messbar gemacht werden können. Um eine zu starke Dämpfung der Schallwellen beim Über gang verschiedener Materialien zu minimieren, wird auf der zu untersuchenden Kör perregion zunächst ein wasserhaltiges Gel aufgetragen, welches eine bessere Kopp lung zwischen Ultraschallsensor und Körper ermöglicht. Ein Teil der Schallintensität wird dann im Körper jeweils beim Übergang von einem Material in ein anderes reflek tiert. Genau wie beim Echolot wird die Tiefe dieser Grenzschichten im Körper durch die Messung der Laufzeit der Signalpulse bestimmt. Dieses Verfahren wird Puls-EchoVerfahren genannt. Ein neuer Impuls darf dabei immer erst dann ausgesendet wer den, wenn die gewünschte Reflexion mit dem Schallkopf empfangen wurde. Bei ei nem zu untersuchenden Objekt, das 10 cm unter der Haut liegt, ergibt sich für die Schallgeschwindigkeit c = 1.500 m/s für Wasser nach Gleichung (4.73) eine Gesamt laufzeit von etwa 89 μs, was einer maximalen Bildwiederholfrequenz von f = 1/∆t = 11,25 kHz entspricht. Man kann nun die gemessene Intensität als Funktion dieser Differenz auftragen und erhält dann einen Graphen, der mehrere Spitzen mit unter schiedlichen Intensitäten beinhaltet. Dieses Verfahren wird als A-Mode (A für Am plitude) bezeichnet. Die Differenz der Spitzen gibt die Entfernung an, wohingegen
4.3 Wellen | 125
die Höhe ein Maß für die Echogenität des Gewebes ist. Diese Größe gibt damit an, wie gut der Schall an der Grenzschicht zwischen diesen Gewebestrukturen reflektiert wird. Beim Übergang von Flüssigkeiten nach Gasen oder festen Stoffen wie Knochen wird meistens sehr viel Schall reflektiert. Flüssigkeiten im Körper, so wie beispielswei se Urin, besitzen daher üblicherweise deutlich geringere Echogenitäten und können demzufolge nur deutlich schlechter untersucht werden. Die A-Mode ist heute allerdings nicht mehr gebräuchlich, da sie lediglich ein eindimensionales Bild liefert. In der Regel wird stattdessen häufig die B-Mode (B für Brightness) eingesetzt. Hierbei wird der Ultraschallkopf mechanisch über einen be stimmten Bereich bewegt, sodass ein Computer aus den verschiedenen Messdaten ein zweidimensionales Bild rekonstruieren kann. Die Helligkeit der Bildpunkte er gibt sich dabei aus der Echogenität. Generell gilt hierbei: Je höher die Intensität des reflektierten Schalls ist, desto heller erscheint diese Region auf dem Bildschirm. Wir werden später bei der Betrachtung des Auflösungsvermögens optischer Geräte sehen, dass die räumliche Auflösung maßgeblich durch Beugungserscheinungen beeinflusst wird. Die maximale Auflösung des Bildes liegt dabei immer in der Größenordnung der Wellenlänge. Moderne Ultraschallgeräte können daher Frequenzen bis zu etwa 40 MHz erzeugen, was einer Wellenlänge von etwa 37,4 μm in Wasser entspricht. Allerdings steigt auch die Absorption von Schall mit kürzer werdender Wellenlän ge, sodass beim Betrachten eines Objekts immer eine optimale Frequenz gefunden werden muss. Neben den statischen Aufnahmen der regulären Sonografie gibt es noch das eben falls sehr wichtige Verfahren der Dopplersonografie, welches den Dopplereffekt zur Be stimmung von Geschwindigkeiten ausnutzt. Für die Herleitung der Frequenzverschie bung nehmen wir zunächst an, dass sich ein Objekt vom Ultraschallsensor wegbe wegt. Der Sensor sendet dabei Ultraschall mit der Frequenz fS aus. Das Objekt „hört“ nun aufgrund seiner Bewegung eine niedrigere Frequenz. Durch die anschließende Reflexion am Objekt wird der Empfänger nun selbst zu einem Sender. Die neue Fre quenz fS , die der Ultraschallsensor beim Empfang der Welle wahrnimmt, ergibt sich damit aus dem Produkt von fQ und fE : fS = fQ fE = fS
c−v c+v
(4.74)
Die sich durch Einsetzen der entsprechenden Formeln ergebende Gleichung ent spricht damit exakt der bereits hergeleiteten Formel für eine Frequenzänderung, falls sich Sender und Empfänger gleichzeitig bewegen. Um daraus die Frequenzver schiebung zu berechnen, muss jetzt noch die Differenz zwischen ausgesendeter und empfangener Frequenz berechnet werden: ∆f = fS − fS = fS (
c−v ) − fS c+v
(4.75)
126 | 4 Schwingungen & Wellen
Abb. 4.16: Beispiel einer Messung mit einem Dopplerultraschall.
Macht man diese Brüche gleichnamig und berechnet anschließend die Differenz, so erhält man folgenden Ausdruck: ∆f = fS
2v v+c
(4.76)
Wir haben bereits gesehen, dass eine Überlagerung zweier ähnlicher Frequenzen zu einer Schwebung führt. Deren Frequenz entspricht in diesem Fall exakt dem herge leiteten Wert ∆f . Durch elektronische Messung dieser Frequenz lässt sich somit die Geschwindigkeit des betrachteten Objekts bestimmen. Auf diese Weise lassen sich bei spielsweise Blutströme im Körper untersuchen, wobei das Dopplersignal hier von den Erythrozyten im Blutkreislauf erzeugt wird. Mit diesem Verfahren können zum Beispiel Engstellen in der Arterie aufgespürt werden, da hier die Fließgeschwindigkeit deutlich zunimmt. Eine Beispielmessung mit einem sogenannten farbcodierten Dopplerultra schall am menschlichen Herzen ist in Abbildung 4.16 dargestellt. Der Farbton gibt hierbei an, wie schnell sich ein Objekt in einem bestimmten Bereich bewegt, wobei ein Blauton in der Regel bedeutet, dass sich das Objekt vom Sensor entfernt.
4.4 Zusammenfassung Das Kapitel beginnt mit einer Einführung in mechanische Schwingungen und betrach tet die sich daraus ergebende Differenzialgleichung am Beispiel von Pendelbewegun gen. Hierbei werden insbesondere Formeln zur Berechnung der Periodendauer eines Faden- und Federpendels hergeleitet. Anschließend wird auf natürliche Schwingun gen eingegangen, die in der Regel gedämpft sind, wobei die einzelnen Dämpfungs arten wie schwache oder starke Dämpfung getrennt voneinander behandelt werden.
Aufgaben | 127
Die sich daraus ergebenden Zusammenhänge werden dann auf erzwungene Schwin gungen übertragen und eine Formel zur Berechnung der Amplitude bei einer beliebi gen Erregerfrequenz hergeleitet. Der darauffolgende Abschnitt über die Fourier-Ana lyse gibt eine kurze Übersicht und Einführung in ein mathematisches Hilfsmittel, das in der Medizin und Technik häufig zum Einsatz kommt, wenn Frequenzspektren von Schwingungen untersucht werden sollen. Die abgeleiteten Gesetzmäßigkeiten in Be zug auf Schwingungen werden nun im nächsten Schritt auf sich im Raum ausbreitende Wellen übertragen. Nach einer kurzen mathematischen Einführung werden Schwe bung und stehende Wellen als Beispiele für mögliche Wellenformen beschrieben und eine Verknüpfung mit akustischen Wellen wird hergestellt. Da das menschliche Gehör als Sinnesorgan für diese Art von Wellen fungiert, wird kurz auf die sich daraus erge benden Begriffe wie Lautstärke und Schalldruck eingegangen. Als weiteres Beispiel für Wellen, die sich in Materie ausbreiten, wird der Ultraschall angeführt und hierbei insbesondere die Funktionsweise des Dopplerultraschalls genauer untersucht.
Aufgaben Aufg. 4.1: Ein Federpendel, an dem eine Masse von 100 g befestigt wurde, schwingt mit einer Periodendauer von 1,5 s. Wie groß ist die Federkonstante? Aufg. 4.2: Ein Fadenpendel besitze eine Länge von 1,20 m. Welche Zeit benötigt es für eine Schwingung? Aufg. 4.3: Eine dünne Stange mit der Länge 50 cm und der Masse 1 kg wird an ihrem oberen Ende drehbar gelagert. Wie groß ist die Periodendauer des daraus entstehen den physikalischen Pendels? Berechnen Sie das Trägheitsmoment mithilfe des Stei ner’schen Satzes. Aufg. 4.4: Bei einem Oszillator wird eine Periodendauer von 30 s gemessen. Dieselbe Messung liefert ein Abfall der Amplitude von 10 % gegenüber der Vorherigen. a) Wie groß ist die Dämpfungskonstante des Systems? b) Wie groß ist die Frequenz des ungedämpften Oszillators? Aufg. 4.5: Auf ein näherungsweise ungedämpftes Federpendel mit der Federkonstan te 200 N/m, an dem eine Masse von 100 g befestigt wurde, wirkt eine periodische Kraft von 1 N. Die Frequenz der erzwungenen Schwingung beträgt 45 Hz. Wie groß ist die sich ergebende Amplitude? Aufg. 4.6: Eine Lichtwelle habe eine Wellenlänge von 500 nm. Wie groß ist dann de ren Frequenz?
128 | 4 Schwingungen & Wellen Aufg. 4.7: Zwei Lautsprecher erzeugen Sinustöne mit leicht unterschiedlicher Fre quenz (200 Hz und 202 Hz). a) Welche mittlere Schwingung wird von einem Beobachter wahrgenommen? b) Wie groß ist die Schwebungsfrequenz? Aufg. 4.8: Eine Orgelpfeife mit geschlossenem Ende soll so gebaut werden, dass die Grundschwingung dem Kammerton mit 440 Hz entspricht. Welche Länge muss die Pfeife ungefähr besitzen, wenn die Schallgeschwindigkeit mit 330 m/s angenommen wird? Aufg. 4.9: Der Schallpegel in einem durchschnittlichen Klassenzimmer beträgt etwa 65 dB. Welchem Schalldruck entspricht dies etwa? Aufg. 4.10: a) Ein Polizeiauto fährt mit einer Geschwindigkeit von 50 km/h auf eine am Straßenrand stehende Person zu. Der Schall wird über ein Martinshorn ausgesen det und hat eine ungefähre Frequenz von 400 Hz. Welche Tonfrequenz nimmt die Per son wahr? b) Dasselbe Polizeiauto fährt einem fahrenden Auto entgegen, das sich in einer Stadt mit einer überhöhten Geschwindigkeit von 60 km/h bewegt. Welche Frequenz regis triert der Fahrer in diesem Auto? Aufg. 4.11: Ein Überschallflugzeug fliege mit einer Geschwindigkeit, die 120 % der Schallgeschwindigkeit in Luft entspricht. Wie groß ist der gesamte Öffnungswinkel des Mach’schen Kegels? Aufg. 4.12: Die Dicke einer Steinwand soll mithilfe einer Ultraschalluntersuchung be stimmt werden. Die Schallgeschwindigkeit in Stein beträgt etwa 4 km/s. Wie dick ist die Wand, wenn die gemessene Zeitdifferenz 150 μs beträgt? Aufg. 4.13: Wie groß ist die zu erwartende Frequenzverschiebung für Blut, das sich mit einer Geschwindigkeit von etwa 10 cm/s durch die Arterie eines Menschen bewegt, wenn die Sendefrequenz 10 MHz beträgt? Die Schallgeschwindigkeit soll hierbei mit 1.500 m/s für Wasser angenähert werden.
5 Wärmelehre 5.1 Übersicht Die Wärmelehre beschäftigt sich hauptsächlich mit drei Aggregatzuständen fest, flüs sig und gasförmig von Materialien bei verschiedenen Drücken und Temperaturen. Zu sammen mit den zugehörigen Phasenübergängen werden diese im ersten Teil dieses Kapitels ausführlich besprochen. Anschließend werden Begriffe wie Wärmekapazität und Verdampfungs- sowie Schmelzwärme am Beispiel fester und flüssiger Körper be sprochen. Außerdem werden physikalische Effekte an Grenzflächen behandelt und hierbei insbesondere auf die Oberflächenspannung von Wasser eingegangen. Auch die Physik der strömenden Flüssigkeiten wird behandelt und mit den eingeführten Größen der vorigen Kapitel verknüpft. Anschließend wird der Schwerpunkt auf Gase gesetzt, die sich in ihrer Beschreibung stark von den anderen beiden Aggregatzustän den unterscheiden. Alle in Bezug auf die Wärmelehre wichtigen Zusammenhänge wie die Hauptsätze der Thermodynamik oder die Geschwindigkeitsverteilung von Gasato men werden im Folgenden ausführlich besprochen. Speziell die Begriffe Osmose und Diffusion spielen in der Medizin und Technik eine wichtige Rolle zum Beschreiben und Berechnen vieler Größen. Abschließend wird der Transport von Wärme zwischen verschiedenen Körpern behandelt und an einigen instruktiven Beispielen erklärt.
5.2 Temperaturskalen Die in Europa verwendete Temperaturskala ist die nach Anders Celsius benannte Celsiusskala. Eine Temperatur wird darin in Grad Celsius (°C) angegeben. Celsius hat die Skala so festgelegt, dass der Wert 0 °C nahe dem Schmelzpunkt von Eis liegt und 100 °C ungefähr mit dem Siedepunkt von Wasser zusammenfällt. Dennoch ist die Wahl des Nullpunktes willkürlich gewählt, sodass sich dieser für Rechnungen der Wärmelehre nicht gut eignet. In der Wärmelehre hat sich daher die Kelvinskala durchgesetzt. Der Nullpunkt dieser Skala entspricht einer Temperatur, bei der Teil chen keine Wärmebewegung mehr besitzen, sodass dieser Wert, der 273,15 °C unter dem Nullpunkt der Celsiusskala liegt, physikalisch nicht mehr unterschritten werden kann. Da die Schrittweite identisch mit der Celsiusskala ist, kann folgende Formel zur Umrechnung der beiden Skalen verwendet werden: T[°C] = T[K] + 273,15 °C
(5.1)
Rechnet man hingegen mit Temperaturdifferenzen können aufgrund der identischen Schrittweite direkt die Celsiuswerte eingesetzt werden: ∆T[K] = ∆T[°C] https://doi.org/10.1515/9783110692921-005
(5.2)
130 | 5 Wärmelehre
Aufgrund dieses Zusammenhangs ist eine vorherige Umrechnung von Grad Celsius nach Kelvin daher nicht immer notwendig.
5.3 Phasenübergänge 5.3.1 Aggregatzustände Prinzipiell können alle Stoffe, die aus Atomen und Molekülen zusammengesetzt sind, drei Aggregatzustände annehmen: fest (s für solid), flüssig (l für liquid) und gasförmig (g für gaseous). Als Synonym wird in der Thermodynamik häufig auch der Begriff der Phase verwendet. Die feste Form haben wir bereits bei idealisierten starren Körpern beziehungswei se bei den realen elastischen Körpern kennengelernt. Die Teilchen sind hierbei fest miteinander verbunden und in bestimmten Strukturen angeordnet. Sie können des halb lediglich periodische Schwingungen um einen vorgegebenen Abstand zueinan der vollführen. Im Prinzip gibt es zwei Anordnungen von Teilchen in einem Festkör per: eine kristalline Form wie bei Kochsalz oder Kristallzucker, in der die Bausteine regelmäßige Muster bilden, und eine amorphe Form. Hierbei sind die Teilchen willkür lich angeordnet und besitzen keine gleichmäßige Struktur. Glas ist hierfür ein gutes Beispiel. Es gibt auch Mischformen zwischen diesen beiden Extrema, die als polykris tallin bezeichnet werden. In diesen Körpern bilden die Bausteine zwar Kristalle, diese sind allerdings in keinen regelmäßigen Strukturen angeordnet. Flüssigkeiten bilden den zweiten Aggregatzustand und zeichnen sich dadurch aus, dass die Teilchen untereinander frei verschiebbar, aber dennoch durch intermo lekulare Kräfte miteinander verbunden sind. Sie setzen der Änderung eines vorgege benen Volumens, zum Beispiel beim Ausschütten eines Gefäßes in einen anderen Be hälter, lediglich einen kleinen bis kaum messbaren Widerstand entgegen. So kann zum Beispiel Wasser ohne Probleme von einem Glas in ein anderes geschüttet wer den. Honig ist zwar zähflüssiger, wodurch der Fließvorgang langsamer abläuft, aber definitionsgemäß dennoch eine Flüssigkeit. Von diesen beiden Zuständen, die auch unter dem Oberbegriff kondensierte Ma terie zusammengefasst werden, unterscheidet sich der gasförmige Aggregatzustand. Hierbei sind die Wechselwirkungen der Teilchen untereinander vernachlässigbar klein. Sie können sich daher frei bewegen und prinzipiell jedes beliebige Volumen einnehmen. Ein Beispiel für einen Stoff, der auf der Erde unter natürlichen Bedingun gen in allen drei Aggregatzuständen vorkommt, ist Wasser. In kalten Regionen wie der Arktis findet man ihn seiner festen Form (Eis oder Schnee), wohingegen die Meere überwiegend aus flüssigem Wasser bestehen. In der Luft kommt Wasser hingegen als gasförmiger Wasserdampf vor, der in der Regel durch die Sonneneinstrahlung erzeugt wird und am Wasserkreislauf der Erde beteiligt ist. Für alle drei Aggregatzustände gilt,
5.3 Phasenübergänge | 131
sublimieren
verdampfen
schmelzen flüssig
fest erstarren
gasförmig
kodensieren
resublimieren
Abb. 5.1: Übersicht über alle möglichen Phasenübergänge der drei Aggregatzustän de.
dass die Bewegung der Teilchen ein Maß für die Temperatur ist. Je schneller sie sich bewegen, desto höher ist die Temperatur. Aggregatzustände von Stoffen können sich durch Hinzufügen oder Abführen von Wärme ändern, wobei die Begriffe Wärme und Energie in diesem Buch als Synony me verwendet werden. Man spricht dann von einem Phasenübergang. Den Übergang von der gasförmigen zur flüssigen Phase nennt man Kondensation. Geht ein Körper hingegen vom flüssigen in den festen Zustand über, dann nennt man diesen Vorgang Erstarren. In umgekehrter Reihenfolge spricht man vom Prozess des Schmelzens und des Verdampfens. Geht ein Stoff hingegen direkt vom festen in den gasförmigen Zu stand über, dann nennt man diesen Vorgang Sublimation, wohingegen der umgekehr te Vorgang von gasförmig nach fest Resublimation genannt wird. Gefrorenes Trocken eis geht beispielsweise bei Raumtemperatur und Atmosphärendruck unmittelbar von der festen in die gasförmige Phase über. Normales Eis schmilzt allerdings zunächst und das entstehende Wasser verdampft anschließend. Eine Übersicht über die be schriebenen Phasenübergänge für alle drei Aggregatzustände ist in Abbildung 5.1 zu sehen.
5.3.2 Phasendiagramme Die Zustände eines Stoffes hängen maßgeblich vom Druck und der Temperatur ab. Kühlt man ein Gas ab, bis die Kondensationstemperatur unterschritten wird, dann kondensiert das Gas und wird flüssig. Derselbe Effekt wird erzielt, wenn man die Tem peratur konstant hält und stattdessen den Druck vergrößert. In beiden Fällen nimmt der Abstand zwischen den Gasteilchen so weit ab, dass sie stark genug miteinan der wechselwirken können, um die Eigenschaft einer Flüssigkeit anzunehmen. Die ses Verfahren wird im Alltag beispielsweise bei Feuerzeugen eingesetzt, die mit Gas unter hohem Druck befüllt sind, sodass dieses auch bei Raumtemperatur flüssig ist. Beim Öffnen des Ventils nimmt der Druck ab und die Flüssigkeit verdampft wieder, so dass das entstehende Gas mit einem Funken entzündet werden kann. Ein ähnliches Verhalten tritt bei Flüssigkeiten auf. Wenn entweder die Temperatur oder der Druck
132 | 5 Wärmelehre
erhöht werden, erstarrt diese zu einem Festkörper, da die Wechselwirkung der Teil chen erneut zunimmt. Die Beziehung zwischen Temperatur und Druck kann daher in einem p-T-Zustandsdiagramm dargestellt werden, in dem man den Druck auf der x-Achse und die Temperatur auf der y-Achse aufträgt, wie auf der linken Seite von Ab bildung 5.2 zu sehen ist. Die Phasengrenzlinien zwischen den Bereichen trennen hier in die unterschiedlichen Phasen voneinander ab. Durch Festhalten des Drucks oder der Temperatur lässt sich damit herausfinden, wie stark der jeweils andere Parame ter variiert werden muss, um eine Veränderung des Aggregatzustandes hervorzuru fen. Eine besondere Bedeutung hat die Grenzlinie zwischen der flüssigen und festen Phase, die auch als Dampfdruckkurve bezeichnet wird. Wenn sich eine Flüssigkeit im Vakuum befindet, dann treten ständig Teilchen aus der Flüssigkeit aus, die über der Flüssigkeitsoberfläche einen Gasdruck erzeugen. Je größer der Druck wird, desto mehr Teilchen wandern zurück in die Flüssigkeit. Ab einem gewissen Druck, der von der Temperatur abhängt, stellt sich ein Gleichgewicht ein. Der sich eingestellte Druck wird Dampfdruck genannt und kann aus dem Phasendiagramm abgelesen werden. Weiterhin zeigen die Phasendiagramme die Position von zwei wichtigen Punkten eines Stoffes: Als Tripelpunkt PT wird die Stelle bezeichnet, an welchem ein Stoff in allen drei Phasen gleichzeitig vorliegt und sich die Mengenverhältnisse zeitlich nicht verändern. Im Fall von Wasser liegt dieser etwa bei einem Druck von 6 mbar und einer Temperatur von 0,01 °C. Außerdem gibt es einen kritischen Punkt PK bei vergleichs weise hohen Temperaturen und Drücken. Dieser Punkt gibt an, ab welchem Druck und welcher Temperatur nicht mehr zwischen der gasförmigen und flüssigen Phase unterschieden werden kann, da sich dort die jeweiligen Eigenschaften immer weiter angleichen. Ein besonderer Stoff ist Wasser, welches eine sogenannte Dichteanomalie auf weist. Aufgrund polarer Eigenschaften der Wassermoleküle nimmt die Dichte von Wasser bei Temperaturen unter 4 °C wieder ab, wohingegen sie bei den meisten an T
T
PK
PK
flüssig
Wasser Eis
fest
PT
PT
gasförmig p
Wasserdampf p
Abb. 5.2: Zwei Phasendiagramme für einen beliebigen Stoff ohne Dichteanomalie (links) und Wasser (rechts).
5.3 Phasenübergänge |
133
deren Stoffen zunimmt, weil speziell bei einem Festkörper die Teilchen enger beiein ander liegen. Eis hat hingegen eine geringere Dichte als Wasser. Die Dichteanomalie hat zur Folge, dass Seen im Winter nicht komplett zufrieren, da Wasser unter 4 °C aufgrund der geringeren Dichte nach oben steigt und somit eine dünne Schicht über dem Boden flüssig bleibt. Im Phasendiagramm macht sich dies durch den Verlauf der Grenzlinie zwischen der festen und der flüssigen Phase bemerkbar, welche hier im Gegensatz zu anderen Stoffen eine negative Steigung hat. Auf der rechten Seite von Abbildung 5.2 ist der Verlauf der Grenzlinie für Wasser gut zu erkennen.
Experiment: Schmelzen von Eis Der umgekehrte Zusammenhang zwischen der Temperatur und dem Druck bei Eis kann mithilfe eines großen Eisblocks anschaulich dargestellt werden. Auf das Eis wird ein dünner Draht gelegt, dessen Enden durch Gewichte beschwert werden. Der große Druck, der durch den Draht auf das Eis ausgeübt wird, sorgt für ein schnelleres Schmelzen, sodass sich der Draht verhältnismäßig schnell durch das Eis schneidet.
5.3.3 Partialdruck Im Vakuum entspricht der Druck des sich aufbauenden Dampfdrucks einer Flüssigkeit exakt dem Druck des Gases über der Oberfläche. Bei Gasgemischen muss hierfür aller dings der Partialdruck des jeweiligen Gases anstelle des Gesamtdrucks verwendet wer den. Der Partialdruck beschreibt den Druck jeder Gaskomponente und ist, wie man bereits vermuten kann, proportional zur Anzahl der Teilchen des jeweiligen Gases in dem betrachteten Gasgemisch. Dieser Zusammenhang wird auch als Dalton’sches Ge setz bezeichnet. Wir nehmen nun an, dass der Luftdruck in Meereshöhe exakt 1 bar beträgt, was meistens bereits eine gute Näherung dargestellt. Luft besteht zu 78 % aus Stickstoff, sodass der Partialdruck damit 780 mbar beträgt. Analog dazu erhält man ebenfalls die Werte der anderen Gase wie Sauerstoff oder Kohlendioxid. Solan ge der Partialdruck von Wasserdampf in Luft unter dem Dampfdruck von Wasser bei einer bestimmten Temperatur liegt, verdunstet weiterhin Wasser in die Atmosphäre. Die Tatsache, dass dieser Prozess in der Regel recht lange dauert und nicht sofort das ganze Wasser verdunstet, lässt sich damit erklären, dass die übrigen Gase in der Luft auf die Wasseroberfläche drücken und die Teilchen somit zusammenhalten. Erreicht man hingegen den Siedepunkt, so ist der Dampfdruck größer als der umgebende At mosphärendruck und die Flüssigkeit beginnt zu kochen. Im Falle von Wasser liegt dieser bei etwa 100 °C, wenn der Atmosphärendruck ca. 1 bar beträgt. Auf hohen Ber gen ist der Luftdruck deutlich geringer, sodass hier Wasser bereits bei viel geringeren Temperaturen kocht. Eine berühmte Anekdote besagt, dass die Siedetemperatur auf dem Mount Everest aufgrund des geringeren Luftdrucks von etwa 330 mbar ca. 70 °C
134 | 5 Wärmelehre
beträgt, sodass sich dort keine Eier kochen lassen, da zum Gerinnen des Eiweißes (ge nauer Ovalbumin) eine Temperatur von über 80 °C notwendig ist.
5.4 Reale Körper & Flüssigkeiten 5.4.1 Wärmeausdehnung Wenn man einen Festkörper oder eine Flüssigkeit erwärmt, dann dehnt sich der Stoff prinzipiell immer aus, was zu einer Abnahme der Dichte führt. Dieses Phänomen kann man vereinfacht mit der größer werdenden kinetischen Energie der Teilchen beschrei ben, wodurch größere Abstände zwischen den Atomen oder Molekülen entstehen. Ex perimentell stellt man für nicht zu große Temperaturänderungen eine Linearität zwi schen Temperatur- und Längenänderung eines Körpers der Länge l0 fest: ∆l = l0 α∆T ,
(5.3)
wobei der Wärmeausdehnungskoeffizient α die entsprechende Proportionalitätskon stante ist. In Tabelle 5.1 ist eine kurze Übersicht einiger ausgewählter Ausdehnungs koeffizienten dargestellt. Betrachtet man beispielsweise ein Rohr, dessen Temperatur um ∆T erhöht wird, dann vergrößert sich die Länge auf l = l0 + ∆l = l0 + ∆l ,
(5.4)
was durch Umformen zu folgendem Zusammenhang zur Berechnung der neuen Län ge l führt: l = l0 (1 + α∆T)
(5.5)
Betrachtet man anstelle der Länge eines idealisierten Drahtes das Volumen eines drei dimensionalen Körpers, muss der Term in Klammern dreimal mit sich selbst multipli ziert werden: (5.6) V = V0 (1 + α∆T)3 Solange die Änderungen klein genug sind, d. h., α∆T ≪ 1 angenommen wird, kann man diesen Zusammenhang durch die Vereinfachung V = V0 (1 + 3α∆T)
Tab. 5.1: Die Wärmeausdehnungskoeffizienten einiger Stoffe bei Raumtemperatur. Stoff
Ausdehnungskoeffizient α[10−6 K]
Quarzglas Keramik Lithium Polyethylen
0,54 2...13 51 150...200
(5.7)
5.4 Reale Körper & Flüssigkeiten |
135
annähern, die sich oft leichter mit dem Taschenrechner ausrechnen lässt. Diese Nä herung gilt sowohl für Festkörper als auch für Flüssigkeiten. Da sich Flüssigkeiten gleichmäßig in alle Richtungen ausbreiten, muss hier der Volumenausdehnungskoef fizient γ angegeben werden, der sich aus dem Produkt des Vorfaktors 3 mit dem Län genausdehnungskoeffizienten ergibt: γ = 3α
(5.8)
Der Volumenausdehnungskoeffizient liegt für die meisten Flüssigkeiten zwischen 0 und 2 ⋅ 10−3 K−1 . Im Falle von Wasser nimmt er bei Temperaturen unter 4 °C auf grund der Dichteanomalie einen negativen Wert an, da sich das Volumen hier bei grö ßeren Temperaturwerten verkleinert. Bei Raumtemperatur beträgt er hingegen γ = 0,21 ⋅ 10−3 K−1 . Zum Vergleich hat γ bei Ethanol den Wert 1,1 ⋅ 10−3 K−1 . Die Volumenausdehnung von Flüssigkeiten wird in Flüssigkeitsthermometern verwendet, um durch das Ansteigen der Flüssigkeitssäule in einem Röhrchen die momentane Temperatur beziehungsweise Temperaturänderungen auf einer vorge gebenen Temperaturskala anzuzeigen. Das Röhrchen muss sehr dünn sein, damit auch kleine Volumenänderungen eine gut sichtbare Ausdehnungsänderung zur Fol ge haben und dadurch der Ablesefehler minimiert werden kann. Verwendet wird hierbei meistens Ethanol, weil der Volumenausdehnungskoeffizient von diesem Stoff relativ groß ist. Früher wurde häufig Quecksilber verwendet. Dieses darf aber aus Gründen der Gesundheitsgefährdung in Deutschland nicht mehr für diese Zwecke eingesetzt werden. Negativ machen sich temperaturabhängige Längenänderungen zum Beispiel beim Brückenbau bemerkbar. Dort werden meistens eine oder mehrere Dehnungsfugen angebracht, welche die Zerstörung der Brücke bei größeren Tempe raturschwankungen verhindern sollen.
5.4.2 Wärmekapazität Man stellt experimentell fest, dass innerhalb eines bestimmten Aggregatzustandes die Temperaturänderung eines Stoffes proportional zur zugeführten Energie zunimmt, d. h., es gilt: ∆Q = C∆T (5.9) Die Proportionalitätskonstante C wird Wärmekapazität genannt. Dies lässt bereits vermuten, dass es einen direkten Zusammenhang zwischen Temperatur und Energie gibt, wie später in Bezug auf Gase noch ausführlicher besprochen wird. Die Wärme kapazität eines Körpers hängt insbesondere von der Zusammensetzung des Stoffes ab. Besteht er aus einem homogenen Material, lässt sich eine spezifische Wärmekapa zität c angeben, die als Wärmekapazität pro Masse interpretiert werden kann. Damit
136 | 5 Wärmelehre
Tab. 5.2: Spezifische Wärmekapazitäten, Schmelzwärmen und Verdampfungswärmen einiger ausge wählter Stoffe. Stoff
Wärmekapazität c [kJ/(kg ⋅ K)]
Schmelzwärme c s [kJ/kg]
Verdampfungswärme c v [kJ/kg]
Wasser (l) Ethanol (l) Helium (g) Eisen (s) Quecksilber (l) Granit (s)
4,18 2,43 5,19 0,45 0,14 0,790
334 105 6 227 11,3
2257 854 21 6340 295
lässt sich für den Zusammenhang zwischen ∆Q und ∆T schreiben: ∆Q = cm∆T
(5.10)
Die Einheit von c wird in der Literatur meistens mit kJ/(kg ⋅ K) angegeben. Wenn man die spezifische Wärmekapazität eines Körpers mit dessen Masse multipliziert, dann er hält man wieder die Wärmekapazität C mit der Einheit kJ/K. Eine kleine Übersicht über die spezifischen Wärmekapazitäten einiger Stoffe ist in Tabelle 5.2 zu finden. Die Ener giezufuhr kann auf verschiedene Weise geschehen. So können u. a. Reibungsverlus te oder elektrische Ströme zum Aufheizen eines Körpers, einer Flüssigkeit oder eines Gases verwendet werden. Fällt beispielsweise ein Gegenstand aus einer bestimmten Höhe in ein Wasserbecken, dann wird die gesamte potenzielle Energie in Wärmeener gie umgewandelt, sodass das Wasser einen geringeren, wenn auch kaum messbaren Temperaturanstieg erfährt. Im Falle einer elektrischen Aufheizung muss die abgege bene Leistung mit der Zeit ∆t multipliziert werden, um ∆Q zu erhalten. Daraus lässt sich die benötigte Zeit für einen Aufheizvorgang bei gegebener Leistung P wie folgt berechnen: ∆t =
cm∆T P
(5.11)
Wichtig bei der Anwendung dieser Formel ist, dass die Leistungsabgabe zeitlich kon stant ist, was bei elektrischen Verbrauchern, wie beispielsweise einem Wasserkocher, immer näherungsweise erfüllt ist.
5.4.3 Mischtemperatur Bringt man zwei Körper mit unterschiedlichen Temperaturen zusammen, dann wan dert Wärme vom Körper mit der höheren Temperatur zum Körper mit der niedrigeren Temperatur, bis sich nach einer gewissen Zeit eine Mischtemperatur TM einstellt. Die
5.4 Reale Körper & Flüssigkeiten
| 137
vom Körper 1 abgegebene Energie muss daher genau der vom Körper 2 aufgenomme nen Energie entsprechen: (5.12) − ∆Q1 = ∆Q2 Das Minuszeichen gibt die Fließrichtung des Wärmestroms an. Unter Verwendung von Gleichung (5.10) erhält man: − m1 c1 (T1 − TM ) = m2 c2 (T2 − TM )
(5.13)
Durch Ausmultiplizieren beider Klammern und Herausziehen von TM mit anschlie ßendem Umstellen erhält man folgende Gleichung zur Berechnung der Mischtempe ratur: TM =
m1 c1 T1 + m2 c2 T2 m1 c1 + m2 c2
(5.14)
Diese Beziehung wird auch Richmann’sche Mischungsregel genannt, benannt nach dem Physiker Georg Wilhelm Richmann. Wichtig zu beachten ist die Umrechnung al ler Temperaturen in die Einheit Kelvin, sofern sie in Grad Celsius oder einer anderen Einheit vorliegen.
5.4.4 Schmelzen und Verdampfen Erhitzt man einen festen Körper mit einer konstanten Leistung, dann steigt seine Tem peratur entsprechend der Gleichung (5.10) zunächst linear mit der Zeit an. Beim Er reichen der Schmelztemperatur geht die zusätzliche Energie in das Aufbrechen der Bindungen zwischen den Teilchen über, sodass die Temperatur konstant bleibt und der Festkörper in den flüssigen Zustand übergeht. Die spezifische Schmelzwärme cs hängt somit nur von der Masse ab und ist über die folgende Gleichung definiert: ∆Qs = mcs
(5.15)
Daher wird die zum Schmelzen eines Stoffes benötigte Energie Qs als Schmelzwärme bezeichnet. Da sie nicht mit einer Temperaturerhöhung einhergeht und somit „ver steckt“ ist, bezeichnet man sie häufig auch als latente Wärme. Nach dem Abschluss des Schmelzvorgangs steigt die Temperatur erneut propor tional zur hinzugeführten Energie an, bis schließlich der Verdampfungspunkt erreicht ist. Hier wird die zusätzliche Energie für die Verdampfung benötigt, was eine konstant bleibende Temperatur zur Folge hat. Analog zum Schmelzen definiert man hierfür die Verdampfungswärme ∆Qv und die spezifische Verdampfungswärme cv über: ∆Qv = mcv
(5.16)
138 | 5 Wärmelehre
Temperatur [ °C]
200 Dampf
Wasser
100 Eis 0 − 100
0
0.5
1
1.5 2 Energie [MJ]
2.5
3
Abb. 5.3: Grafische Darstellung der spezifischen und latenten Wärmekapazität am Beispiel von Was ser.
Wenn schließlich die gesamte Flüssigkeit in die gasförmige Phase übergegangen ist, dann steigt auch die Temperatur wieder linear an. Die jeweiligen spezifischen Wär mekapazitäten für die feste, flüssige und gasförmige Phase sowie die Schmelz- und Verdampfungswärme unterscheiden sich für denselben Stoff im Allgemeinen deut lich. Tabelle 5.2 zeigt eine Übersicht über die Schmelz- und Verdampfungswärme ei niger ausgesuchter Stoffe. Abbildung 5.3 zeigt die grafische Darstellung der gerade beschriebenen Begriffe am Beispiel von 1 kg Wasser. Die Temperatur des Eises beträgt zunächst −100 °C. Nach dem Hinzuführen von mehr als 3 MJ (!) Wärme, ist das Eis mit einer Temperatur von ursprünglich −100 °C in Wasserdampf mit einer Temperatur von 200 °C umgewandelt worden. Sowohl Schmelz- als auch Verdampfungsvorgang sind vollkommen reversibel, d. h., beim Erstarren beziehungsweise Kondensieren wird die zuvor aufgenommene Energie wieder vollständig an die Umgebung abgegeben. Früher wurden daher oft Wassereimer in die unbeheizten Keller von Wohnhäusern gestellt. Beim Gefrieren des Wassers im Winter hat die abgegebene Schmelzwärme sichergestellt, dass die Tem peratur der Luft im Keller nicht unter den Gefrierpunkt sank. Eine ähnliche Methode ist die sogenannte Frostschutzberegnung. Um Nutzpflanzen im Winter vor Frost zu schützen, werden diese zuvor mit Wasser besprüht, das durch Abgabe der Schmelz wärme die Zerstörung der Pflanzen verhindert. Ein weiteres Beispiel ist die Wärmere gulierung des menschlichen Körpers durch die Erzeugung von Schweiß über spezielle Schweißdrüsen. Der Fachbegriff hierfür lautet Transpiration. Speziell bei hohen Um gebungstemperaturen wird die Verdunstungswärme des Wassers verwendet, um den Körper herunterzukühlen. Befindet man sich allerdings in einer Umgebung mit einer hohen Luftfeuchtigkeit, kann die Luft kein Wasser mehr aufnehmen und eine Abga be von Wärme durch Transpiration wird unmöglich. Daher sind Sommertage mit ei ner hohen Luftfeuchtigkeit meist schwerer zu ertragen als solche mit niedrigerer Luft feuchtigkeit.
5.4 Reale Körper & Flüssigkeiten
| 139
5.4.5 Schweredruck Füllt man eine Flüssigkeit in ein Gefäß mit der Grundfläche A, dann wirkt die gesamte Gewichtskraft der Flüssigkeitssäule auf den Boden des Gefäßes, wie auf der linken Seite von Abbildung 5.4 zu sehen ist. Für den Druck ergibt sich somit allgemein: p=
mg F = A A
(5.17)
Die Masse m kann durch das Produkt aus Dichte ϱ und Volumen V = Ah ersetzt wer den, wenn h die Höhe der Flüssigkeitssäule ist. Nach dem Kürzen der Fläche A erhält man dann unmittelbar folgende Formel zur Berechnung des Schweredrucks (auch hy drostatischer Druck genannt): p = ϱgh
(5.18)
Dieser hängt – anders als man vielleicht intuitiv erwarten würde – lediglich von der Dichte der Flüssigkeit und dem Abstand zur Oberfläche ab. Die Tatsache, dass die Form des Gefäßes und somit die Größe des Bodens keine Rolle spielen, wird als hy drostatisches Paradoxon bezeichnet. Somit wirkt auf alle in Abbildung 5.5 gezeigten Gefäße derselbe hydrostatische Druck auf den Boden. Erklären lässt es sich damit, dass sich Teilchen in den Flüssigkeiten immer so verschieben, dass sie sich im Gleich gewicht befinden. Dadurch wirken aber von Gefäßwänden Gegenkräfte auf die Flüs sigkeit, die dafür sorgen, dass der Druck in einer bestimmten Schicht einer Flüssig keit immer gleich groß ist und lediglich vom Abstand zur Oberfläche der Flüssigkeit abhängt. Der Druck hat außerdem an einer beliebigen Stelle in alle Richtungen densel ben Betrag, d. h., er wirkt isotrop. Dies wird im Bereich der Hydrodynamik oft als Pas cal’sches Gesetz bezeichnet. Auf einen Taucher, der horizontal in einem Wasserbecken in einer Tiefe von 10 m liegt, wirkt somit ein Druck von etwa 1 bar sowohl auf seinen Rücken als auch auf seinen Bauch. Das physikalische Phänomen des Schweredrucks wird auch im medizinischen Bereich, wie beispielsweise bei der Behandlung von Öde men, verwendet. Hierbei handelt es sich um eine Schwellung von Körpergewebe auf
h1
F A = F Fl
h2
V = Ah
h VK
p
p A
FG
Abb. 5.4: Skizzen zur Herleitung des Schweredrucks (links) und der Auftriebskraft (rechts).
140 | 5 Wärmelehre
Abb. 5.5: Demonstration des hydrostatischen Paradoxons. Der Schweredruck der Flüssigkeit auf dem Boden ist bei allen Gefäßen gleich groß.
grund von Flüssigkeitseinlagerungen. Wenn der Patient dabei im Wasser läuft, dann ist der Druck im Bereich der Beine am größten, was dort zu einem „entstauenden“ Effekt führt. Aus dem Schweredruck leitet sich eine heutzutage speziell beim Messen des Blutdrucks verwendete Druckeinheit ab, welche Millimeter Quecksilbersäule (mmHg beziehungsweise Torr) genannt wird. Sie gibt den Schweredruck einer 1 mm hohen Quecksilbersäule an, der aufgrund der größeren Dichte deutlich höher als der von Wasser ist. Es handelt sich hierbei zwar nicht um eine SI-Einheit. Dennoch darf sie innerhalb der Europäischen Union für gewisse Zwecke verwendet werden. Die Dichte von Quecksilber beträgt unter Normalbedingungen etwa ϱ = 13,5951 g/cm3 . Zusam men mit der Erdbeschleunigung g ergibt dann als Umrechnung zwischen mmHg und Pascal: 1 mmHg = 133,322 Pa
(5.19)
Würde man stattdessen Wasser als Grundlage nehmen, dann ließe sich die Höhe ge mäß der folgenden Formel berechnen: hW =
ϱ Hg hHg ϱW
(5.20)
Die Erdbeschleunigung kürzt sich jeweils auf beiden Seiten der Gleichung heraus.
5.4.6 Auftrieb Jetzt soll die Frage geklärt werden, was passiert, wenn man einen festen Körper in eine Flüssigkeit taucht. Wir betrachten zunächst, wie auf der rechten Seite von Abbil dung 5.4 skizziert ist, der Einfachheit halber einen Körper mit rechteckiger Grundflä che A. Die Unterseite hat somit den Abstand h2 zur Oberfläche der Flüssigkeit. Daher wirkt dort der Druck p2 = ϱgh2 . Auf die Oberseite des Körpers mit dem Abstand h1 zur Oberfläche wirkt entsprechend der Druck p1 = ϱgh1 . Dieser ist aufgrund der kleineren
5.4 Reale Körper & Flüssigkeiten |
141
Wassersäule geringer als p2 . Für die Druckdifferenz ergibt sich dann mit ∆h = h2 − h1 : ∆p = ϱg∆h
(5.21)
Multipliziert man diese Gleichung mit der Querschnittsfläche A, dann erhält man für die Auftriebskraft, die auf den Körper wirkt, die Beziehung FA = ϱVg
(5.22)
beziehungsweise noch weiter vereinfacht: FA = FFl
(5.23)
Die Auftriebskraft ist somit gleich der Gewichtskraft der verdrängten Flüssigkeit, was auch als archimedisches Prinzip bezeichnet wird, da Archimedes dieses Prinzip ver mutlich nicht als Erster gefunden, aber zumindest gesichert aufgeschrieben hat. Ob wohl die Formel für einen bestimmten Körper hergeleitet wurde, kann man mathe matisch zeigen, dass sie für alle Formen gilt, was sich ebenfalls auf die Isotropie des wirkenden Druckes zurückführen lässt. Wichtig für die Berechnung der Auftriebskraft ist daher lediglich die Kenntnis über das Volumen des Körpers und die Dichte der Flüs sigkeit. Damit ein Körper in einer Flüssigkeit schwimmt, d. h. sich weder nach oben noch unten bewegt, muss die Auftriebskraft und somit die Gewichtskraft FFl der verdräng ten Flüssigkeit genau gleich der Gewichtskraft FK des Körpers sein: FK = FFl
(5.24)
Ersetzt man nun die Gewichtskräfte durch F = ϱVg und kürzt das identische Volumen sowie den Ortsfaktor heraus, dann erhält man für die Schwimmbedingung: ϱ K = ϱ Fl
(5.25)
Die Dichte des Körpers muss somit exakt der Dichte der Flüssigkeit entsprechen. Wenn die Dichte des Körpers größer als die Dichte der Flüssigkeit ist, dann sinkt der Körper langsam zu Boden. Ist sie hingegen kleiner, dann steigt der Körper auf und ragt an schließend so weit aus der Wasseroberfläche heraus, dass die Auftriebskraft gerade die Gewichtskraft kompensiert. Dasselbe Verhalten kann auch bei Flüssigkeiten be obachtet werden, die sich nicht gegenseitig durchmischen. Wenn man beispielsweise etwas Öl in ein Gefäß mit Wasser gießt, dann wird das Öl aufgrund seiner geringeren Dichte oben schwimmen.
5.4.7 Oberflächenspannung Eine Oberflächenspannung tritt immer bei Flüssigkeiten auf, deren Moleküle stark miteinander wechselwirken. Da Wasser aus Dipolmolekülen besteht, bilden sich
142 | 5 Wärmelehre
starke Wasserstoffbrücken zwischen den Wasserstoffatomen eines Teilchens und dem Sauerstoffatom eines anderen Teilchens aus. Innerhalb der Flüssigkeit wirkt die Kraft isotrop in alle Richtungen. An der Wasseroberfläche hingegen fehlt die obere Kraftkomponente, was dazu führt, dass eine resultierende Kraft auf diese Moleküle senkrecht zur Oberfläche wirkt. Dieser Fall ist auf der linken Seite von Abbildung 5.6 illustriert. Taucht man nun einen Gegenstand ein, dann muss das Wasser um diesen herum fließen, was effektiv zu einer Vergrößerung der Wasseroberfläche entlang der einge tauchten Grenzschicht führt. Dazu müssen weitere Moleküle aus dem Innern nach au ßen wandern und folglich Arbeit W gegen die Anziehungskraft der Teilchen verrich ten. Man definiert daher den Bruch geleistete Arbeit geteilt Vergrößerung der Fläche ε=
∆W ∆A
(5.26)
als sogenannte spezifische Oberflächenenergie mit der Einheit J/m2 . Da ε von der ver wendeten Flüssigkeit abhängt, muss die spezifische Oberflächenenergie zunächst ex perimentell bestimmt werden. Dazu wird ein Draht zu einem rechteckigen Drahtbü gel gebogen und anschließend ein beweglicher Querbügel an diesem befestigt. Taucht man die Vorrichtung in die zu vermessende Flüssigkeit, dann entsteht zwischen der Halterung und dem Querbügel eine dünne Flüssigkeitslamelle. Verschiebt man nun den Bügel um die Strecke ∆s, muss dazu die Arbeit ∆W = F∆s = ε2L∆s = ε∆A
(5.27)
verrichtet werden, sodass sich aus dem Messen der Kraft und der Verschiebung die spez. Oberflächenenergie bestimmen lässt. Der Faktor 2 kommt daher, dass sowohl die Ober- wie auch die Unterseite der Flüssigkeitslamelle berücksichtigt werden müssen. Der Parameter lässt sich dementsprechend als Zugspannung ε=
F 2L
(5.28)
interpretieren, die tangential zur Wasseroberfläche wirkt. Diese Zugspannung wird Oberflächenspannung σ genannt und besitzt die Einheit N/m, die identisch mit der bereits kennengelernten Einheit J/m2 ist. Im Alltag spielt die Oberflächenspannung beispielsweise bei der Bildung von Sei fenblasen oder Schaum eine wichtige Rolle. Die Oberflächenspannung von reinem Wasser liegt unter Normalbedingungen bei etwa σ = 0,0728 Nm und wäre für die Bildung von makroskopischen Blasen viel zu groß. Die hinzugefügte Seife besteht al lerdings zu einem großen Teil aus Tensiden, die einen wasserlöslichen (hydrophil oder lipophob) und einen fettlöslichen (hydrophob oder lipophil) Anteil haben. Tenside ha ben die Aufgabe, die Oberflächenspannung des Wassers herabzusetzen, sodass auch Seifenblasen mit sehr großen Oberflächen entstehen können. Die Oberflächenspan nung sorgt weiterhin dafür, dass sich die gebildete Oberfläche möglichst klein ma chen möchte. Dies geschieht so lange, bis der dadurch größer werdende Luftdruck in
5.4 Reale Körper & Flüssigkeiten
| 143
σ1,3
Gas
Gas Feststoff
Flssigkeit
θ σ2,3
σ2,3 Flüssigkeit
Abb. 5.6: Die Entstehung der Oberflächenspannung durch anziehende Kräfte in die flüssige Phase (links) und die Krümmung einer Flüssigkeitsoberfläche aufgrund der resultierenden Grenzflächen spannung (rechts).
Experiment: Schwimmende Rasierklinge Man kann die Oberflächenspannung mithilfe einer leichten Rasierklinge deutlich machen, wenn man sie vorsichtig auf einer Wasseroberfläche platziert. Obwohl die Auftriebskraft nicht ausreicht, sie schwimmen zu lassen, ist die Oberflächenspannung groß genug sie zu tragen. Dies kann man zeigen, indem man in einem gewissen Abstand etwas Spülmittel in das Wasser gibt. Sobald die Tenside, die die Oberflächenspannung herabsetzen, die Rasierklinge erreichen, sinkt sie mit gro ßer Geschwindigkeit zu Boden.
der Blase so weit zugenommen hat, dass er diesen Effekt vollständig kompensiert und eine Seifenblase mit konstanter Größe erzeugt. Unter Zuhilfenahme der Oberflächenspannung kann auf einfache Weise die maxi male Größe von Tropfen berechnet werden, die beispielsweise am unteren Ende einer Kapillare entstehen. Und zwar reißt der sich stetig vergrößernde Tropfen genau dann ab, sobald seine Gewichtskraft größer als die durch die Oberflächenspannung beding te Kraft wird, die seine Oberfläche zu verkleinern versucht. Die Bedingung kann daher wie folgt aufgeschrieben werden: (5.29) FO = FG Die Gewichtskraft lässt sich mg und m durch ϱV ersetzen, wobei V das Volumen des Tropfens ist. Für die linke Seite ist der Umfang πd der Kapillare entscheidend, der mit der Oberflächenspannung multipliziert werden muss. Setzt man alles ein und stellt nach V um, so erhält man V= für das maximale Volumen des Tropfens.
πdσ ϱg
(5.30)
144 | 5 Wärmelehre
5.4.8 Grenzflächen Speziell bei der Wechselwirkung zwischen einer flüssigen und festen Phase verwen det man die Begriffe Adhäsion für die Anziehung der Teilchen zwischen beiden Phasen und Kohäsion für die Anziehungskräfte der Teilchen einer Phase untereinander. Kohä sionskräfte werden durch elektrische Wechselwirkungen zwischen den Teilchen her vorgerufen und häufig nach ihrem Entdecker auch Van-der-Waals-Kräfte genannt. Sie können bei polaren Stoffen wie Wasser sehr ausgeprägt sein oder wie im Fall unpolarer Stoffe durch induzierte Dipole deutlich schwächer sein. Hierbei entstehen durch Stö ße der Teilchen untereinander Verschiebungen in den Ladungsschwerpunkten. Ist die Adhäsion größer als die Kohäsion, dann läuft die Flüssigkeit auseinander und benetzt die Oberfläche vollständig. Ist hingegen die Kohäsion größer, dann wird die Flüssig keit von der Oberfläche abgewiesen und es entsteht eine kugelförmige Tröpfchenform. Auch bei der Adhäsion spielen elektrische Anziehungskräfte zwischen Teilchen eine wichtige Rolle. Die Adhäsionskräfte hängen immer von den chemischen und physika lischen Eigenschaften beider beteiligten Stoffe ab. Die Wechselwirkungsprozesse zwischen verschiedenen Stoffen sollen nun genau er analysiert werden: Neben der bereits im letzten Abschnitt betrachteten Grenzfläche zwischen Flüssigkeiten und Gasen müssen wir nun den allgemeineren Fall von Grenz flächen zwischen festen (1), flüssigen (2) und gasförmigen (3) Phasen betrachten, wo bei für jede dieser Grenzflächen analog zur Oberflächenspannung eine Grenzflächen spannung σ i,j eingeführt wird, die gleich der spezifischen Grenzflächenenergie ε i,j ist. Die Indizes i und j können folglich die ganzzahligen Werte 1 bis 3 annehmen. Bei der Größe ε2,3 = σ 2,3 handelt es sich daher um die bereits betrachtete Oberflächenspan nung einer beliebigen Flüssigkeit. Genauso wie bei Wasser muss ε2,3 immer positiv sein, damit diese stabil bleibt, da die Teilchen sonst in die gasförmige Phase übertre ten würden. Die Grenzflächenenergie ε1,2 ist unmittelbar mit den Adhäsionskräften zwischen der Flüssigkeit und dem Festkörper verknüpft. Die ebenfalls vorhandenen Wechselwirkungen zwischen der gasförmigen und festen Phase werden mit ε1,3 be schrieben. Die drei aus den Grenzflächenspannungen σ i,j resultierenden Kräfte wir ken ebenfalls tangential zu den Grenzschichten, was zu einer im Falle der festen Pha se nicht merklichen Verformung führt. Die Oberfläche der Flüssigkeit verändert sich hingegen so, dass die resultierende Kraft im Berührungspunkt aller drei Phasen ver schwindet. Durch eine Projektion von σ 2,3 auf die tangential zur festen Phase verlaufenden Grenzflächenspannungen ergibt sich somit in Summe die nach Thomas Young be nannte Young’sche Gleichung σ 1,2 + σ 2,3 cos φ − σ 1,3 = 0 oder nach cos φ umgestellt: cos φ =
σ 1,3 − σ 1,2 σ 2,3
(5.31)
(5.32)
5.5 Strömende Flüssigkeiten |
145
Falls σ 1,3 größer als σ 1,2 ist, gilt cos φ > 0 und somit φ < 90°. Die Flüssigkeit bildet dann eine konkav gekrümmte Oberfläche und ist somit benetzend. Dies trifft beispiels weise auf Wasser in einem Glasbehälter zu. Der sich einstellende Winkel ist in diesem Fall ziemlich genau φ = 20°. Aufgrund ihrer Form wird diese Wölbung auch als Me niskus (griechisch für Halbmond) bezeichnet. Beim Ablesen der Skala in einem dafür vorgesehenen Gefäß ist darauf zu achten, stets die Unterseite der Wölbung zu verwen den, da das Volumen sonst falsch bestimmt wird. Im umgekehrten Fall σ 1,3 < σ 1,2 ist φ > 90°, sodass sich eine konvex gekrümmte Oberfläche einstellt. Ein Beispiel hierfür ist ein mit Quecksilber befülltes Glasgefäß, da hier die Vergrößerung der Grenzschicht fest-gasförmig energetisch günstiger ist. Bringt man ein dünnes Röhrchen (Kapillare) mit dem Innenradius r in eine Flüs sigkeit, dann steigt die Flüssigkeit im Innern aufgrund der Grenzflächenspannung auf die Höhe h über dem Flüssigkeitsspiegel außerhalb an. Dieses Verhalten wird allge mein als Kapillarität bezeichnet. Damit steigt die potenzielle Energie um ∆Epot = mgh = Vϱg∆h
(5.33)
an. Mit V = πr2 h für ein Zylindervolumen ergibt sich daraus: ∆Epot = πr2 ϱgh∆h
(5.34)
Gleichzeitig ändert sich die Oberflächenenergie gemäß der Oberfläche eines Zylinders A = 2πrh: ∆EO = −(σ 1,3 − σ 1,2 )2πr∆h (5.35) Mithilfe von Gleichung (5.31) und der Tatsache, dass σ 2,3 gleich der Oberflächenspan nung σ ist, ergibt sich: (5.36) ∆EO = 2πrσ cos φ∆h Eine konstante Höhe stellt sich für die Bedingung ∆Epot = −∆EO ein. Einsetzen der beiden Gleichungen führt dann zu folgender Formel zur Berechnung von h: h=
2σ cos φ rgϱ
(5.37)
Durch die Bestimmung der Höhe und des Randwinkels kann somit auf einfache Weise die Oberflächenspannung einer Flüssigkeit gemessen werden.
5.5 Strömende Flüssigkeiten 5.5.1 Volumenstrom Für die Herleitungen in den folgenden Abschnitten wird vorausgesetzt, dass lamina re Strömungen vorliegen, d. h. die betrachteten Flüssigkeiten ohne Verwirbelungen
146 | 5 Wärmelehre
und Querströmungen fließen. Diese Bedingung ist im Zusammenhang mit den behan delten Themen in den meisten Fällen und unter normalen Bedingungen gut erfüllt. Strömt eine Flüssigkeit, wie beispielsweise Wasser, durch ein Rohr mit dem Quer schnitt A, dann ist der Volumenstrom als Quotient des geflossenen Volumens und der dabei verstrichenen Zeit definiert beziehungsweise allgemeiner als der Differenzial quotient: Q=
dV dt
(5.38)
Ersetzt man V durch das Produkt As aus Querschnittsfläche und Strecke, dann erhält man für den Volumenstrom die Beziehung: Q = Av
(5.39)
A ist hierbei der Querschnitt des Rohres, durch den die Flüssigkeit fließt, und v die Geschwindigkeit aller Flüssigkeitsteilchen. Flüssigkeiten sind meistens in guter Nähe rung inkompressibel, d. h., das Volumen kann durch äußeren Druck nicht maßgeblich verändert werden. Daher muss der Volumenstrom im gesamten Rohr konstant sein. In einem Rohrsystem mit unterschiedlichen Querschnitten (s. Abbildung 5.7) gilt daher durch Gleichsetzen von Q1 und Q2 : v1 A2 = v2 A1
(5.40)
Das Verhältnis der beiden Geschwindigkeiten ist somit umgekehrt zum Verhältnis der Querschnitte oder anders ausgedrückt: Je enger ein Rohr wird, desto schneller muss die Flüssigkeit fließen, damit überall das gleiche Volumen pro Zeiteinheit fließen kann. Für zylinderförmige Rohre ergibt sich dann mithilfe der Formel zur Berechnung der Kreisfläche: v1 r22 = (5.41) v2 r21 Hierbei wurden die π im Nenner und Zähler gekürzt.
A1
v1
v2
A2
Abb. 5.7: Beispiel eines Rohrs, dessen Quer schnitt verkleinert wird, wodurch die Geschwin digkeit der darin fließenden Flüssigkeit im hin teren Teil zunimmt.
5.5 Strömende Flüssigkeiten
| 147
5.5.2 Bernoulli-Gleichung Wenn man ein Flüssigkeitsvolumen V gegen einen äußeren Druck p verschiebt, dann muss dafür die Arbeit W = Fs (5.42) verrichtet werden. Dieser Druck wird auch als Stempeldruck bezeichnet. Mit den Be ziehungen F = pA und V = As folgt daraus der Zusammenhang: Estat = pV
(5.43)
Die geleistete Arbeit und die anschließend zur Verfügung stehende Energie hängen somit vom Druck und dem Volumen der Flüssigkeit ab. Wenn sich ein Flüssigkeitsvolumen in der Höhe h befindet, dann besitzt es die potenzielle Energie Epot = mgh = ϱVgh (5.44) und bei einer strömenden Flüssigkeit gilt für die kinetische Energie eines beliebigen Volumenelementes: 1 1 (5.45) Ekin = mv2 = ϱVv2 2 2 Aufgrund des Energieerhaltungssatzes muss die Gesamtenergie aus allen drei Formen stets erhalten sein, d. h., es muss gelten: Estat + Epot + Ekin = const ,
(5.46)
was nach dem Ersetzen der Terme und Kürzen von V zum Gesamtdruck p + ϱgh +
1 2 ϱv = p0 2
(5.47)
führt. Diese Relation wird Bernoulli-Gleichung genannt. In Worten besagt sie: Die Summe aus statischem Druck p, dynamischem Druck 1/2ϱv2 und Gewichtsdruck ϱgh muss stets gleich dem ursprünglichen Druck p0 sein. Wenn sich beispielsweise der dynamische Druck ändert, d. h. die Fließgeschwindigkeit der Flüssigkeit, dann muss sich ebenfalls der statische Druck ändern, damit die Bernoulli-Gleichung weiterhin erfüllt ist. Als Beispiel für die Anwendung der Bernoulli-Gleichung betrachten wir eine Was sersäule mit einem Loch, das sich im Abstand h von der Wasseroberfläche befindet. In der Säule befindet sich das Wasser näherungsweise in Ruhe, d. h., der dynamische Druck verschwindet hier. Allerdings besitzen die Wassermoleküle dort den Gewichts druck ϱgh. Beim Ausströmen aus dem Loch besitzen sie lediglich noch einen dynami schen Druck 1/2ϱv2 . Sowohl vor als auch nach dem Ausströmen wirkt der Luftdruck p
148 | 5 Wärmelehre
als statischer Druck auf die Wassermoleküle und fällt somit aus der Gleichung heraus. Damit ergibt sich schließlich 1 2 (5.48) ϱv = ϱgh 2 und umgestellt nach v: v = √2gh
(5.49)
Diese Formel wurde bereits für einen Massepunkt aus dem Energieerhaltungssatz ab geleitet. Somit entspricht die Geschwindigkeit der Wassermoleküle beim Austritt aus dem Loch exakt der Geschwindigkeit eines Gegenstandes, der aus der Höhe h fallen gelassen wird, was aufgrund der vorliegenden Energieerhaltung ebenfalls nicht ver wunderlich ist. Obwohl die Bernoulli-Gleichung streng genommen nur für inkompressible Flüs sigkeiten gilt, kann man sie in guter Näherung auch für Gase anwenden, solange die betrachteten Geschwindigkeiten nicht zu groß werden. Die horizontal strömende Luft erzeugt somit eine Verringerung des statischen Luftdrucks, der sich gemäß BernoulliGleichung wie folgt berechnen lässt: p = p0 −
1 2 ϱv 2
(5.50)
Strömt ein Gas beispielsweise über eine horizontale Fläche, dann verringert sich der Druck auf der Oberseite um p−p0 , wohingegen unterhalb weiterhin der statische Luft druck herrscht, was insgesamt zu der nach oben gerichteten Kraft F=
1 2 ϱv A 2
(5.51)
auf die Fläche A führt.
Abb. 5.8: Kommunizierende Röhren zur Demonstration des hydrodynamischen Paradoxons. Im mitt leren Teil ist die Geschwindigkeit der strömenden Flüssigkeit größer, sodass der dynamische Druck abnimmt und der Wasserstand sinkt. Die Fließgeschwindigkeit wird durch die Länge der Pfeile sym bolisiert.
5.5 Strömende Flüssigkeiten |
149
Experiment: Hydrodynamisches Paradoxon Man kann die Bernoulli-Gleichung mit drei Steigrohren verdeutlichen, welche alle über ein waa gerecht verlaufendes Rohr miteinander verbunden sind. Dieses Rohr, durch das eine Flüssigkeit strömt, verjüngt sich im Bereich des mittleren Steigrohrs. Dadurch vergrößert sich die Fließge schwindigkeit und der Druck in der Flüssigkeit nimmt ab, was sich durch ein Abfallen der Höhe der Flüssigkeitsoberfläche im mittleren Steigrohr gegenüber Ersterem bemerkbar macht. Im Fal le einer idealen Flüssigkeit würde die Oberfläche im dritten Steigrohr wieder die Höhe des ersten Steigrohres haben. Dies ist in Abbildung 5.8 skizziert und wird allgemein als hydrodynamisches Paradoxon bezeichnet. Da aber die Fließgeschwindigkeit von realen Flüssigkeiten aufgrund von Reibung langsamer wird, ist die Höhe im dritten Steigrohr noch geringer als im mittleren Rohr.
5.5.3 Viskosität Der Begriff Viskosität beschreibt die innere Reibung einer Flüssigkeit oder eines Gases, die durch die Wechselwirkung der Teilchen untereinander entsteht. Um darüber quan titative Aussagen zu treffen, ersetzen wir die Flüssigkeit durch einen Quader, der aus verschiedenen Schichten in y-Richtung aufgebaut ist. Dieses in Abbildung 5.9 skizzier te Verfahren nennt sich daher Schichtmodell einer Flüssigkeit. Die unterste Schicht ist fixiert, hat also immer die Geschwindigkeit v = 0, während auf die oberste Schicht eine Kraft entlang der x-Achse ausgeübt wird. Diese bewegt sich folglich in x-Rich tung und übt Scherkräfte auf die darunterliegenden Platten aus. Aufgrund der Rei bung zwischen Platten, nimmt die Geschwindigkeit von oben nach unten ab. Um die Geschwindigkeit der Schichten zu erhöhen, muss die Kraft vergrößert werden. Expe rimentell findet man den Zusammenhang F ∝ v. Eine Vergrößerung der Platten führt ebenfalls dazu, dass eine größere Kraft benötigt wird. Auch in diesem Fall ergibt sich eine Proportionalität: F ∝ A. Macht man den Plattenabstand d kleiner, muss die Kraft ebenfalls größer werden. Damit erhält man F ∝ 1/d. Daraus folgt, dass die Kraft eben falls proportional zum Produkt der einzelnen Terme sein muss: F∝A
F
d
dy v = 0 (fest)
v d
(5.52)
A v = v0 Abb. 5.9: Das Plattenmodell einer Flüssigkeit zur Herleitung der Beziehung zwischen der wirkenden Kraft und dem Geschwindigkeitsunterschied zwi schen den Platten aufgrund der inneren Reibung.
150 | 5 Wärmelehre
Für unendlich kleine Abstände geht dieser Zusammenhang in die allgemeinere diffe renzielle Form über: F = ηA
dv dy
,
(5.53)
wobei hier die Proportionalitätskonstante η eingeführt wurde. Diese wird in der Lite ratur häufig als Viskosität beziehungsweise dynamische Zähigkeit bezeichnet. Die Viskosität einer Flüssigkeit kann mithilfe eines Kugelfall-Viskosimeters be stimmt werden. Eine fallende Kugel erfährt hierbei in der zu prüfenden Flüssigkeit aufgrund der dynamischen Zähigkeit eine Reibungskraft FR . Unter der Annahme, dass die Kugel langsam genug fällt, liegt eine laminare Strömung vor und es gilt der Zusam menhang aus Gleichung (5.52). Ersetzt man nun die Fläche A durch die Querschnitts fläche πr2 der Kugel und den Abstand d durch den Kugelradius r, dann erhält man für die sogenannte Stokes’sche Reibung (benannt nach George Gabriel Stokes) die Formel: FR = 6πηrv
(5.54)
Hierbei steht v für die Fallgeschwindigkeit der Kugel. Der zusätzliche Faktor 6 folgt aus einer detaillierten und aufwendigen Berechnung, die über dieses Einführungskapitel hinausgehen würde, und ist experimentell gesichert. Die Kugel wird zunächst durch die Differenz aus der Gewichtskraft FG und Auftriebskraft FA so lange beschleunigt, bis diese ab einer gewissen Geschwindigkeit von der Reibungskraft kompensiert wird. Verwendet man für die Gewichtskraft die Beziehung 4 FG = mg = πr3 ϱ K g , (5.55) 3 so erhält man durch Bildung der Summe 4 4 FR + FG + FA = 6πηrv + πr3 ϱ K g + πr3 ϱ Fl g = 0 (5.56) 3 3 und Umstellen nach η die folgende Beziehung zwischen der Fallgeschwindigkeit und der Viskosität: η=
2(ϱ K − ϱ Fl ) 2 r g 9v
(5.57)
Das Viskosimeter kann im Allgemeinen auch gekippt werden, sodass die Kugel im Zy linder rollt und somit insgesamt die Geschwindigkeit reduziert wird, wobei dann al lerdings nicht mehr die oben genannte Formel benutzt werden kann.
5.5.4 Gesetz von Hagen-Poiseuille Betrachten wir nun gemäß Abbildung 5.10 einen realen Zylinder mit dem Radius R und der Länge L, in dem eine Flüssigkeit der Zähigkeit η fließt. Zwischen den Stirn flächen des Zylinders soll die Druckdifferenz ∆p = p2 − p1 herrschen. Die durch diese
5.5 Strömende Flüssigkeiten
| 151
R dr
L
Abb. 5.10: Quadratisches Strömungs profil einer Flüssigkeit in einem Rohr mit Reibung. Am Rand des Rohres ruht die Flüssigkeit, wohingegen entlang der Symmetrieachse die Strömung am größ ten ist.
Druckdifferenz verursachte Kraft bei einer konstanten Strömung soll gleich der Rei bungskraft durch den Zylindermantel A = 2πrL sein. Daher gilt − η2πrL
dv = πr2 ∆p , dr
(5.58)
da aus Symmetriegründen lediglich der Abstand r von der Zylinderachse berücksich tigt werden muss. Zur Bestimmung der Geschwindigkeit v in Abhängigkeit von r kann diese Gleichung umgestellt und integriert werden: R
v(r) = ∫ r
∆p r ̃ dr ̃ , 2ηL
(5.59)
was zu folgender Beziehung führt: v(r) =
∆p (R2 − r2 ) 4πL
(5.60)
Dies führt zu dem in Abbildung 5.10 skizzierten quadratischen Strömungsprofil. Damit ergibt sich für die Flüssigkeitsmenge pro Zeiteinheit in einer kleinen Teilschicht dr: dV(r) dr = 2πv(r) dr dt
(5.61)
2πr (R2 − r2 ) dV(r) dr = ∆p dr dt 2ηL
(5.62)
Einsetzen von v(r) liefert somit:
Im letzten Schritt muss dann noch nach dr integriert werden und man erhält dann unmittelbar das Gesetz von Hagen-Poiseuille: dV πR4 = ∆p dt 8ηL
(5.63)
Dieses Gesetz besagt, dass der Volumenstrom in einem zylinderförmigen Rohr pro portional zur Druckdifferenz zwischen Anfang und Ende ist, und zeigt, dass der Vo lumenstrom mit der vierten Potenz des Radius anwächst. Diese starke Abhängigkeit
152 | 5 Wärmelehre
von R erklärt auch, warum die Verengung der Blutgefäße bei Rauchern so gefährlich ist. Außerdem kann der menschliche Körper den Blutfluss über die Verengung und Er weiterung der Blutgefäße effektiv steuern. Hierbei muss allerdings erwähnt werden, dass das Gesetz von Hagen-Poiseuille für Blut nur eingeschränkt gilt, da Blut keine perfekte Newton’sche Flüssigkeit ist, d. h., die Viskosität besitzt eine leichte Abhän gigkeit vom Druck. Dennoch kann man es in den meisten Fällen als gute Näherung betrachten.
5.6 Gase 5.6.1 Ideales Gas Ein ideales Gas zeichnet sich dadurch aus, dass die Ausdehnung der Teilchen gegen über ihren Abständen und Wechselwirkungen zwischen ihnen vernachlässigt werden können. Besonders Wasserstoff und die Edelgase aus der letzten Hauptgruppe des Pe riodensystems können aufgrund ihrer Reaktionsträgheit (chemisch inert) als nahezu ideale Gase betrachtet werden. Der Zustand eines idealen Gases ist durch seine Tem peratur, sein Volumen und seinen Druck vollständig definiert. Im Folgenden sollen, sofern nicht anders vermerkt, lediglich ideale Gase betrachtet und untersucht werden.
5.6.2 Gasgesetze Insgesamt gibt es drei Gasgesetze, aus denen schließlich eine allgemeine Gasglei chung hergeleitet werden soll. Diese Gasgesetze sind jeweils nach ihren Entdeckern benannt worden und gelten streng genommen lediglich für die idealen Gase. Für reale Gase gelten sie aber innerhalb bestimmter Parameter zumindest näherungsweise. 5.6.2.1 Boyle-Mariotte Das erste Gesetz befasst sich mit dem Zusammenhang zwischen dem Druck und dem Volumen eines idealen Gases. Robert Boyle und Edme Mariotte haben diesen Zusam menhang unabhängig voneinander gefunden. Um dieses Gesetz zu finden, stellen wir uns vor, das ideale Gas befindet sich einem Gefäß, das mit einem beweglichen Kolben luftdicht abgeschlossen ist. Der Kolben wird mit Gewichten beschwert, sodass sich im Gas ein definierter Druck einstellt, der sich aus der Gewichtskraft und der Quer schnittsfläche des Kolbens errechnen lässt. Wichtig bei der Untersuchung ist, dass die Temperatur die ganze Zeit über konstant gehalten wird, d. h., ein isothermer Pro zess vorliegt. Außerdem muss der Behälter so dicht sein, dass kein Austausch von Teilchen mit der Umgebung stattfinden kann, da es sich ansonsten nicht mehr um ein geschlossenes System handelt.
5.6 Gase
| 153
Wenn man die Anzahl der Gewichte vergrößert und somit den Kolben weiter in das Gefäß hineindrückt, stellt man zunächst eine Erhöhung der Temperatur fest. Die Messung kann demnach erst dann vorgenommen werden, wenn die Temperatur auf Raumtemperatur abgeklungen ist. Man stellt dann fest, dass sich die Höhe des Kol bens und somit das Volumen selbst proportional zum Druck verkleinern, d. h., es gilt: V∝
1 p
(5.64)
Anders ausgedrückt: Das Produkt aus Druck und Volumen ist bei einem idealen Gas stets konstant: pV = const
(5.65)
Dieses experimentelle Resultat erscheint sinnvoll, da wir das Produkt pV bereits mit der Energie verknüpft haben, die in einem abgeschlossenen System stets erhalten sein muss. Aus diesem Zusammenhang folgt unmittelbar, dass bei einer Zustandsänderung das Produkt von p und V vorher und nachher gleich sein muss: p1 V1 = p2 V2
(5.66)
Alle drei Schreibweisen sind äquivalent zueinander und werden in der Literatur ver wendet, um das Gesetz von Boyle-Mariotte darzustellen. 5.6.2.2 Gay-Lussac Ein ähnliches Gesetz wurde von Jacques Charles und Joseph Louis Gay-Lussac für eine Beziehung zwischen Volumen und Temperatur entdeckt. Wenn man den vorherigen Aufbau so ändert, dass man die Temperatur des Gases durch Wärmezufuhr erhöhen kann, dann lässt sich eine Proportionalität zwischen Volumen und Temperatur fest stellen, wenn die Anzahl der Gewichte und damit der Stempeldruck konstant gehalten werden. Es liegt damit ein isobarer Prozess vor. Das Gesetz von Gay-Lussac lässt sich demzufolge analog zu Boyle-Mariotte als V = const T
(5.67)
schreiben. Hierbei muss die Temperatur natürlich in Kelvin eingesetzt werden, um sinnvolle Ergebnisse zu erhalten. 5.6.2.3 Amontons Das Gesetz von Amontons beschäftigt sich mit der letzten Kombination der drei Zu ständsgrößen. Hierbei handelt es sich um eine isochore Zustandsänderung. Das be deutet, dass das Volumen konstant bleibt, Temperatur und Druck sich hingegen än
154 | 5 Wärmelehre
dern. Guillaume Amontons fand heraus, dass sich beide Größen proportional zuein ander verhalten, sodass man schreiben kann: p = const T
(5.68)
5.6.3 Ideale Gasgleichung Wir haben gesehen, dass das Volumen proportional zur Temperatur und umgekehrt proportional zum Druck zunimmt. Weiterhin leuchtet ein, dass das Volumen eines Gases proportional zur vorhandenen Teilchenzahl sein muss. Demzufolge lassen sich alle Größen wie folgt miteinander kombinieren: V∝
NT p
(5.69)
Stellt man die Gleichung um und führt zusätzlich die sogenannte Boltzmann-Konstan te k B mit dem Zahlenwert k B = 1,381 ⋅ 10−23 JK (5.70) als Proportionalitätsfaktor ein, dann ergibt sich daraus eine Gleichung, die alle Zu ständsänderungen des idealen Gases korrekt beschreibt: pV = Nk B T
(5.71)
Diese Gleichung wird oft als ideale Gasgleichung bezeichnet. Bei realen Gasen gibt es in verschiedenen Temperatur- und Druckbereichen zum Teil erhebliche Abweichun gen. Dennoch soll sie im Folgenden als Ausgangspunkt für weitere Untersuchungen verwendet werden. Man kann die Teilchenzahl N in der Gasgleichung auch durch die Stoffmenge n ersetzen. In diesem Fall muss die Boltzmann-Konstante k B durch die Gaskonstante R ersetzt werden: pV = nRT
(5.72)
Man kann durch Umrechnung der Teilchenzahl in Stoffmenge leicht zeigen, dass diese dann den Wert J R = 8,31448 (5.73) K ⋅ mol annehmen muss.
5.6.4 Kinetische Gastheorie Im Folgenden soll ein Zusammenhang zwischen der Temperatur und der kinetischen Energie der Gasteilchen hergestellt werden. Dazu definieren wir zunächst die Teil
5.6 Gase
| 155
chendichte n (nicht zu verwechseln mit der Stoffmenge) als Teilchenzahl pro Volu men: N (5.74) n= V Des Weiteren betrachten wir einen würfelförmigen Behälter, in dem das Gas einge schlossen ist. Die Anzahl der Teilchen, die innerhalb einer bestimmten Zeit ∆t gegen eine der 6 Wände stoßen, ergibt sich dann zu: N = n x v x A∆t
(5.75)
Hierbei wurde zur Vereinfachung die x-Richtung gewählt. Bei jeder Kollision des Teil chens überträgt es den Impuls ∆|p|⃗ = 2m∆v (5.76) auf die Wand. Anstelle von p wurde hier die Schreibweise |p|⃗ für den Impuls verwen det, um später eine Verwechslung mit dem Druck zu verhindern. Der Faktor 2 kommt daher, dass die Teilchen nicht in der Wand stecken bleiben, sondern ohne Reibung reflektiert werden. Die Gesamtkraft auf die Wand ergibt sich dann aus der Anzahl der kollidierenden Teilchen N und dem Impulsübertrag zu: F = N
∆|p|⃗ = 2mn x Av2x ∆t
(5.77)
Damit folgt dann für den Druck die Beziehung: p=
F = mn x v2x A
(5.78)
Da sich genauso viele Teilchen in negativer wie in positiver x-Richtung bewegen, wur de die rechte Seite noch mit 1/2 multipliziert, wodurch der Faktor 2 verschwindet. Um den Gesamtdruck in alle Richtungen zu bestimmen, kann man davon ausge hen, dass die Geschwindigkeit aller Teilchen isotrop verteilt ist und es keine Vorzugs richtung gibt. Damit sind die Mittelwerte der Quadrate identisch: v2x = v2y = v2z =
1 2 v 3
(5.79)
Somit gilt für den Gesamtdruck: p=
1 mnv2 3
(5.80)
Multipliziert man diesen Ausdruck mit V und erweitert ihn zusätzlich mit 1/2, so er hält man: 2 1 pV = N mv2 (5.81) 3 2 Vergleicht man diesen Ausdruck nun mit der kinetischen Energie, so ergibt sich: pV =
2 NEkin 3
(5.82)
156 | 5 Wärmelehre
Diese Formulierung besagt, dass das Produkt aus Druck und Volumen gleich der mitt leren Energie aller Gasteilchen mit der Masse m ist. Dieses Ergebnis ist sinnvoll, da wir bereits festgestellt haben, dass der Ausdruck pV als Energie interpretiert werden kann. Weiterhin erhält man durch Einsetzen in die Gasgleichung die folgende Bezie hung: 1 2 3 mv = k B T 2 2
(5.83)
Die Temperatur kann somit unmittelbar einer kinetischen Energie und somit mittleren Geschwindigkeit der Gasteilchen zugeordnet werden. Wichtig ist hierbei zu erwähnen, dass nicht alle Teilchen dieselbe Geschwindigkeit haben, sondern diese statistisch verteilt ist. Aus diesem Grund kann daher immer nur von einer mittleren Geschwin digkeit beziehungsweise mittleren kinetischen Energie gesprochen werden. Die Letzte erfordert nochmal die Wahl einer absoluten Temperaturskala mit T = 0 K bei v = 0.
5.6.5 Innere Energie & Wärmekapazität Die kinetische Energie der Gasteilchen wird auch als innere Energie U des Gases be zeichnet. Der Zähler im Bruch in Gleichung (5.83) leitet sich allgemein von der An zahl f der Freiheitsgrade der Teilchen im Gas ab. Da wir bei einer reinen Translati on lediglich drei Raumrichtungen berücksichtigen müssen, ergibt sich f = 3. Bei hö heren Energien können allerdings noch weitere Freiheitsgrade wie eine Rotation der Teilchen oder Schwingungen hinzukommen, sodass sich f erhöht. Man kann davon ausgehen, dass im thermischen Gleichgewicht die gesamte innere Energie des Gases gemäß dem Gleichverteilungssatz auf alle Freiheitsgrade gleichmäßig aufgeteilt ist. Daher gilt allgemein für die innere Energie eines Gases: U=
1 fNk B T 2
(5.84)
Natürlich lässt sich die innere Energie ebenfalls in Bezug auf die Stoffmenge berech nen. Wenn wir also die innere Energie pro Mol angeben möchten, dann können wir schreiben: 1 U = fRT (5.85) 2 Erhöht man die innere Energie eines Gases um eine gewisse Wärmemenge, dann gilt einfach ∆U = ∆Q. Verwendet man nun noch die Definition der Wärmekapazität ∆Q = C∆T, so erhält man analog dazu die spezifische Molwärme für ein Gas bei konstantem Volumen (isochorer Prozess): cV =
1 fR 2
(5.86)
5.6 Gase |
157
Sie bezieht sich immer auf eine Stoffmenge von einem Mol und hängt von keinem anderen Faktor als der Anzahl der Freiheitsgrade ab. Im nächsten Schritt soll die Molwärme eines Gases für den Fall hergeleitet wer den, dass sich das Volumen bei der Temperatur ausdehnen kann und der Druck somit konstant bleibt, also ein isobarer Prozess vorliegt. In diesem Fall wird zusätzlich die Arbeit ∆W = p∆V verrichtet, sodass für die Änderung der inneren Energie ∆U = cV ∆T + p∆V
(5.87)
gilt. Ersetzt man nun den zweiten Summanden mithilfe der idealen Gasgleichung, dann ergibt sich: ∆U = cV ∆T + R∆T , (5.88) wobei wir uns an dieser Stelle wieder auf die Stoffmenge 1 mol beschränken wollen. Wir definieren nun die spezifische Molwärme cp für einen konstanten Druck über die Änderung der inneren Energie: (5.89) ∆U = cp ∆T Setzt man diese Beziehung in die Gleichung (5.88) ein und dividiert anschließend durch ∆T, dann erhält man: cp = cV + R
(5.90)
Auch hier hängt die Molwärme, also die spezifische Wärmekapazität pro Mol, lediglich von der Gaskonstanten ab.
5.6.6 Barometrische Höhenformel Der Schweredruck einer Flüssigkeit wurde unter der Annahme hergeleitet, dass die se inkompressibel ist, d. h., sich die Dichte in Abhängigkeit des Drucks nicht verän dert. Diese Bedingung muss für Gase verständlicherweise fallen gelassen werden, da es eine starke Abhängigkeit des Volumens vom Druck gibt, wie man aus dem BoyleMariotte-Gesetz unmittelbar ablesen kann. Die Dichte wird dann zu einer Funktion des Drucks ϱ(p) und Gleichung (5.18) gilt nur noch für infinitesimal kleine Abschnitte dh, sodass man schreiben kann: dp = −ϱ(p)g dh (5.91) Da sich die Masse der Luft nicht verändert, folgt aus der idealen Gasgleichung die Beziehung: p p0 (5.92) = ϱ ϱ0 Einsetzen dieser Gleichung ergibt: dp = −
ϱ0 gp dh p0
(5.93)
158 | 5 Wärmelehre Separiert man die Variablen h und p, dann kann man beide Seiten von der Höhe h = 0 m bis zu einer bestimmten Höhe h integrieren: p
∫ p0
h
dp̃ ϱ0 g dh̃ = −∫ p0 p̃
(5.94)
0
Der Druck ändert sich hierbei von p0 nach p, weshalb die Grenzen auf der linken Sei te so gewählt wurden. Führt man diese Integration explizit aus, so ergibt sich unter Anwendung der Logarithmengesetze: ln (
p ϱ0 )= gh p0 p0
(5.95)
Umformen nach p liefert schließlich die gesuchte barometrische Höhenformel: p = p0 e
−ϱ 0 g ph
0
(5.96)
Der Druck nimmt somit nicht wie bei einer Flüssigkeit linear, sondern exponentiell mit der Höhe ab. In Abbildung 5.11 wurde der Druckabfall in Abhängigkeit der Höhe über Meereshöhe für zwei verschiedene Temperaturen aufgetragen. Während sich die Dichte als Funktion der Temperatur ändert, wurde für den Luftdruck auf 0 m Höhe in beiden Fällen der Wert 101,325 kPa vorgegeben. Deutlich zu erkennen ist der expo nentielle Abfall, was die Notwendigkeit einer Fremdluftversorgung in großen Höhen unterstreicht. Durch Umstellen nach h lässt sich mit dieser Formel ebenfalls die Höhe berech nen, wenn die Druckänderung bekannt ist. Dieses Verfahren zur Höhenbestimmung wird beispielsweise in Höhenmessern von Flugzeugen eingesetzt, um deren Entfer nung zum Erdboden zu berechnen. Hierbei gilt zu beachten, dass wir bei der Her leitung eine konstante Temperatur angenommen haben. Dies gilt für kleine Höhen
Luftdruck [kPa]
100
80 T = 20°C 60
T = − 10°C
40 0
2
4
6
Höhe [km]
8
10
Abb. 5.11: Exponentieller Abfall des Luft drucks mit steigender Höhe für zwei verschiedene Temperaturwerte.
5.6 Gase
| 159
änderungen hinreichend genau. Bei größeren Änderungen muss diese Temperatur änderung allerdings noch mit berücksichtigt werden, was zu einer Modifikation der Höhenformel führt, die aber den Rahmen dieser Einführung sprengen würde.
5.6.7 Maxwell-Boltzmann-Verteilung Bei der Herleitung der barometrischen Höhenformel haben wir bereits gesehen, dass das Verhältnis von Druck und Dichte konstant ist. Wir können in dieser Formel daher den Druck ohne Probleme mit der Dichte des Gases ersetzen: ϱ = ϱ0 e
−
ϱ0 gh p0
(5.97)
Erweitert man nun den Bruch im Exponenten mit einem beliebigen Volumen V und ersetzt dann den Nenner mit der idealen Gasgleichung, so erhält man: ϱ = ϱ0 e
mgh − Nk T B
(5.98)
Wir wissen bereits, dass die Teilchenzahldichte n in einem bestimmten Volumen pro portional zur Dichte des Gases ist, d. h., es gilt: n = n0 e
− mgh k T B
(5.99)
Der Zähler lässt sich nun als potenzielle Energie des Gases E = mgh interpretieren, was durchaus sinnvoll erscheint, da wir bereits bei Betrachtungen innerhalb der ki netischen Gastheorie gesehen haben, dass die Größe k B T mit der Energie eines Gases verknüpft ist. Unter der Annahme, dass sich alle Gasschichten im Gleichgewicht be finden, kann der Energieerhaltungssatz ausgenutzt und die potenzielle Energie durch die kinetische Energie ersetzt werden: n = n0 e
E
− kkinT B
(5.100)
Der Exponentialterm spielt in der Thermodynamik eine wichtige Rolle und wird Boltz mann-Faktor genannt. Möchte man daraus die Wahrscheinlichkeit dafür berechnen, dass ein Teilchen die Geschwindigkeit v besitzt, so muss die sich ergebende Funktion noch normiert werden, damit das Integral unter dem Graphen den Wert 1 annimmt. Setzt man jetzt noch die Formel für die kinetische Energie ein, so ergibt sich die folgende Wahrschein lichkeitsverteilung für ein Teilchen in einem Gas der Temperatur T: p(v) = √
2 m − mv e 2kB T 2πk B T
(5.101)
Man erkennt sofort, dass es sich hierbei um eine symmetrische Gaußverteilung um den Ursprung herum handelt, d. h., der Mittelwert aller Geschwindigkeiten ist 0, da
160 | 5 Wärmelehre
es keine bevorzugte Richtung für die Gasteilchen gibt. Für alle drei Dimensionen er geben sich durch die Beziehung v2 = v2x + v2y + v2z entsprechend Kugelflächen, deren Wahrscheinlichkeitsdichte ebenfalls durch eine Gaußverteilung beschrieben werden kann. Mit dieser Vorbetrachtung wollen wir nun die Verteilung für den Betrag der Ge schwindigkeit ausrechnen, ohne dabei die Richtung der Teilchen zu berücksichtigen: Dazu gehen wir davon aus, dass sich alle Teilchen mit dem Geschwindigkeitsbetrag v auf einer Kugelfläche um den Ursprung herum befinden. Für die Wahrscheinlichkeit, ein Teilchen auf dieser Kugelfläche zu finden, muss Gleichung (5.101) daher noch mit der Kugelfläche 4πv2 selbst multipliziert werden. Das Ergebnis ist dann die bekannte Maxwell-Boltzmann-Verteilung: 3
p(v) = (√
2 m − mv ) 4πv2 e 2kB T 2πk B T
(5.102)
Die Normierungskonstante muss außerdem dreimal mit sich selbst multipliziert wer den, um eine Fläche von 1 zu erhalten, wodurch sich die dritte Potenz der Wurzel er klären lässt. Leitet man diese Funktion ab und setzt das Ergebnis gleich 0, so erhält man als Ergebnis für das Maximum der Verteilung:
v̂ = √
2k B T m
(5.103)
Hierbei handelt es sich folglich um die Geschwindigkeit mit der größten Wahrschein lichkeit, nicht aber um die mittlere Geschwindigkeit der Gasteilchen. Diese lässt sich analog zum arithmetischen Mittel berechnen, indem man über alle möglichen Ge schwindigkeiten aufsummiert. Da es sich um unendlich viele Geschwindigkeiten han
4
·10−3
Wahrscheinlichkeit
v¯ = 261 m/s 3
T = − 170°C v¯ = 440 m/s
2
1 T = 20°C 0
0
200
400 600 800 1.000 1.200 Geschwindigkeit [m/s]
Abb. 5.12: Maxwell-Boltzmann-Verteilung am Beispiel von Sauerstoff für zwei ver schiedene Temperaturen.
5.6 Gase
| 161
delt, geht die Summe in ein Integral über: ∞
v̄ = ∫ vp(v) dv
(5.104)
0
Durch partielle Integration erhält man somit für die mittlere Geschwindigkeit v̄ =
8k B T πm
(5.105)
Geometrisch handelt es sich hierbei um die Geschwindigkeit, bei der die Flächen unter dem Graphen auf beiden Seiten dieses Wertes gleich groß werden. Die Maxwell-Boltz mann-Verteilung ist am Beispiel von Sauerstoff in Abbildung 5.12 zu sehen. Zusätzlich dazu wurde dort der theoretisch berechnete Wert der mittleren Geschwindigkeit v̄ für zwei verschiedene Temperaturen mit eingefügt. Man sieht, dass die Verteilungsfunk tion sehr stark von der Temperatur T abhängt und asymmetrisch ist.
5.6.8 Reale Gase Bei der Herleitung der idealen Gasgleichung und kinetischen Gastheorie wurde im plizit angenommen, dass die Gasteilchen unendlich klein sind und Wechselwirkun gen zwischen ihnen vernachlässigt werden können. Bei realen Gasen ist dies aller dings nicht mehr der Fall. Stattdessen muss das Eigenvolumen der Gasteilchen vom Gesamtvolumen des Gases abgezogen werden, da dieses den Gasteilchen nicht mehr zur Verfügung steht. Das Volumen V in der idealen Gasgleichung muss daher für n mol Teilchen durch die Differenz V − nb ersetzt werden, wobei b eine experimentell zu be stimmende Stoffkonstante des Gases ist. Um die Anziehungskräfte der Gasteilchen untereinander zu berücksichtigen, kön nen wir davon ausgehen, dass jedes Teilchen in dem betrachteten Gasvolumen Kohä sionskräfte auf die jeweils anderen Gasteilchen ausübt. Die Kraft, die auf alle Gasteil chen wirkt, muss daher proportional zum Quadrat ihrer Dichte und somit umgekehrt proportional zum Gasvolumen selbst sein. Dadurch verringert sich der Gasdruck p um den Wert na/V 2 , der als Binnendruck oder Kohäsionsdruck bezeichnet wird. a ist eben falls eine stoffspezifische Größe, die experimentell bestimmt werden muss. Man erhält damit nun insgesamt für die Zustandsgleichung realer Gase die sogenannte Van-derWaals-Gleichung: (p +
na ) (V − nb) = nRT V2
(5.106)
Stellt man die Gleichung nach p um, so lässt sich der Druck als Funktion des Vo lumens für eine feste Temperatur darstellen. In Abbildung 5.13 wurde sie für CO2 und
162 | 5 Wärmelehre
Druck [bar]
80
60
40
20
100
200
300
400
500
600
Volumen [cm 2 ]
Abb. 5.13: Grafische Darstellung der Van-der-Waals-Gleichung für Kohlen dioxid bei 273,15 K mit Maxwell’scher Linie.
eine Temperatur von 273,15 K (Isotherme) gezeichnet. Die aus der Literatur entnom menen Konstanten wurden dabei so umgerechnet, dass das Volumen in cm3 und der Druck in bar angegeben werden können. Für große Volumina und kleine Drücke ist der Verlauf annähernd identisch mit der idealen Gasgleichung. Unterhalb eines be stimmten Volumens folgen dann ein Umkehrpunkt und ein Druckabfall, der sich bei noch kleineren Volumina wieder in einen stärkeren Anstieg verwandelt. Diese Um kehrpunkte lassen sich in der Natur allerdings nicht beobachten, da das gesamte Sys tem sich hier in einem instabilen Zustand befindet. Stattdessen muss eine Linie, die sogenannte Maxwell’sche Gerade, so durch den Graphen gelegt werden, dass die bei den sich ergebenden Flächen zwischen der Linie und dem Graphen gleich groß wer den. Erreicht man von großen Volumina kommend den rechten Schnittpunkt, beginnt das Gas, sich zu verflüssigen. Der Druck bleibt während dieses Prozesses weitgehend konstant, bis man schließlich den linken Schnittpunkt erreicht. An diesem Punkt ist das gesamte Gasvolumen idealerweise in die flüssige Phase übergegangen. Der starke Anstieg des Druckes bei noch kleineren Volumen stimmt mit der beobachteten Inkom pressibilität von Flüssigkeiten überein.
5.7 Erster Hauptsatz Wir haben bereits gesehen, dass die innere Energie eines Gases sowohl durch Wärme ∆Q als auch durch das Leisten von mechanischer Arbeit p∆V geändert werden kann. In beiden Fällen wird die kinetische Energie und somit die Geschwindigkeit der Gas teilchen erhöht. Man kann daher allgemein schreiben: ∆U = ∆Q + p∆V
(5.107)
Diese Formulierung, die im Prinzip nichts anderes als der Energieerhaltungssatz ther modynamischer System ist, gilt allerdings streng genommen lediglich für gleichmä
5.7 Erster Hauptsatz
| 163
ßige Änderungen der drei Größen. Im allgemeinen Fall müssen infinitesimal kleine Änderungen berücksichtigt werden: dU = dQ + dW
(5.108)
Dies ist die Standardschreibweise für den 1. Hauptsatz der Thermodynamik, welche in der gängigen Literatur zu finden ist. Wenn das System Arbeit verrichtet, ist dW ne gativ, weil dann ebenfalls die innere Energie abnehmen muss. Falls Arbeit am System verrichtet wird, muss dW entsprechend größer als 0 sein. Der 1. Hauptsatz lässt sich genauso wenig wie der Energieerhaltungssatz aus fun damentaleren Betrachtungen herleiten. Er entspricht vielmehr der Erfahrung und der Tatsache, dass es noch niemandem gelungen ist, ein Perpetuum mobile zu erschaf fen, das mehr Energie erzeugt, als hineingesteckt wird. Ein solches System würde in Analogie zum 1. Hauptsatz als Perpetuum mobile erster Art bezeichnet.
5.7.1 Adiabatische Prozesse In den vorherigen Abschnitten wurden die Wärmekapazitäten für den isochoren und den isobaren Fall cV und cp hergeleitet. Jetzt betrachten wir den Fall, dass ein Sys tem mechanische Arbeit verrichtet und dies so schnell geschehen soll, dass kein Wär meaustausch mit der Umgebung möglich ist. Einen solchen Prozess nennt man adia batisch. Das System soll folglich für diesen Zeitraum als perfekt isoliert angesehen werden können. In diesem Fall verschwindet die Wärmemenge dQ und übrig bleibt lediglich: dU = −pdV (5.109) Ersetzt man hier dU durch cV dT und p mithilfe der idealen Gasgleichung pV = RT für n = 1 mol, dann ergibt sich nach dem Umformen folgende Differenzialgleichung: cV
dT dV = −T T V
(5.110)
Integriert man beide Seiten und verwendet dabei ein unbestimmtes Integral, so erhält man: (5.111) cV ln T = R ln V + const Bringt man R ln V auf die linke Seite, dann ergibt sich durch Anwendung der Loga rithmenregeln: (5.112) ln (T c V V −R ) = const Damit muss auch das Argument des Logarithmus konstant sein. Mit der Beziehung aus Gleichung (5.90) ergibt sich dann: T c V V c V −c p = const
(5.113)
164 | 5 Wärmelehre
Im letzten Schritt muss noch auf beiden Seiten die cV -te Wurzel gezogen werden, was zu folgender Gleichung führt: TV κ−1 = const
(5.114)
Hierbei wurde das Verhältnis von cp und cV zur Verkürzung der Schreibweise durch den sogenannten Adiabatenindex κ ersetzt: κ=
cp cV
(5.115)
Mit der allgemeinen Gasgleichung ergibt sich durch Einsetzen ebenfalls eine zweite wichtige Beziehung: pV κ = const
(5.116)
Diese beiden Zusammenhänge werden meistens als Adiabatengleichungen bezeichnet und beschreiben, wie sich die drei Zustandsgrößen Druck, Volumen und Temperatur eines idealen Gases bei adiabatischen Änderungen zueinander verhalten. Aufgrund der Tatsache, dass κ immer größer als 1 ist, verläuft die Adiabatenkurve für kleine Werte von V steiler als die Kurve einer isothermen Änderung mit dQ > 0. Erst für Volumina mit Werten größer als 1 ist ihr Verlauf flacher. Ein Vergleich zwischen diesen beiden Kurven ist auf der linken Seite von Abbildung 5.14 dargestellt. Setzt man die Wärmekapazitäten in den Adiabatenkoeffizienten ein, dann ergibt sich unmittelbar der Zusammenhang: κ=
f +2 f
(5.117)
Bei einem idealen Gas beträgt die Anzahl der Freiheitsgrade immer f = 3, da hierbei lediglich die Translation eine Rolle spielt, wodurch κ den Wert 5/3 annimmt. Bei mo lekularen Stoffen wie Stickstoff oder Sauerstoff liegt f hingegen bei 5, sodass für κ der Wert 7/5 gilt.
5.7.2 Carnot-Prozess Eine Wärmekraftmaschine wie eine Dampfmaschine oder ein Automotor wandelt Wär meenergie in mechanische Arbeit um. Die Maschine kommt nach dem Durchlaufen ei nes Kreisprozesses wieder zu ihrem Ausgangszustand zurück und arbeitet somit peri odisch. Ist es möglich, den Kreisprozess in die umgekehrte Richtung laufen zu lassen, so bezeichnet man ihn als reversibel, also umkehrbar. Andernfalls wird er irreversibel genannt.
5.7 Erster Hauptsatz
| 165
p p
∆Q 1
1
2
∆ Q2 4
3 V
V
Abb. 5.14: Ein Vergleich zwischen dem Verlauf einer isothermen (durchgezogene Linie) und einer adiabatischen Zustandsänderung (gestrichelte Linie) auf der linken Seite sowie ein Beispiel eines Carnot’schen Kreisprozesses (rechts).
Ein einfaches Beispiel zum Betrachten der thermodynamischen Gesetzmäßigkei ten ist der nach Nicolas Léonard Sadi Carnot benannte Carnot’sche Kreisprozess, des sen Funktionsprinzip auf der rechten Seite von Abbildung 5.14 skizziert ist und im Folgenden erläutert werden soll: Wir starten bei einem willkürlich gewählten Punkt 1 oben links in einem p-V-Diagramm mit dem Druck auf der y-Achse und dem Volu men auf der x-Achse. Außerdem verwenden wir in unserem Gedankenexperiment der Einfachheit halber ein ideales Gas, sodass alle Rechnungen analytisch durchgeführt werden können. Zunächst wird das Gas isotherm expandiert, bis Punkt 2 erreicht ist. Dazu muss die Wärmeenergie ∆Q1 von außen zugeführt werden. Weil die Temperatur und somit die innere Energie des Gases konstant sind, gilt nach dem 1. Hauptsatz: dQ = p dV
(5.118)
Die hinzugeführte Wärmeenergie wird somit vollständig in mechanische Arbeit um gewandelt: V2
∆W1,2 = ∫ p dV
(5.119)
V1
Wir beschränken uns erneut auf die Stoffmenge 1 mol und können somit die mecha nische Energie unter Verwendung der idealen Gasgleichung direkt berechnen: V2
∆W = ∫ V1
RT1 V2 dV = RT1 ln ( ) V V1
(5.120)
Anschließend führt eine adiabatische Expansion zu Punkt 3. Hierbei ist die Änderung der Wärmemenge dQ = 0 und für die mechanische Arbeit gilt: ∆W2,3 = dU = −p dV
(5.121)
166 | 5 Wärmelehre
Von hier wird das Gas isotherm bis Punkt 4 komprimiert. Dazu muss dem System die Wärmeenergie ∆Q2 entzogen werden, sodass am System die Arbeit ∆W3,4 = RT2 ln (
V3 ) V4
(5.122)
geleistet werden muss. Abschließend wird das Gas erneut adiabatisch komprimiert und der Prozess beginnt nach dem Erreichen von Punkt 1 von vorn. Da die am System verrichtete Arbeit bei der adiabatischen Kompression gleich der vom System verrich teten Arbeit bei der adiabatischen Expansion ist, heben sich beide Beträge in der Ge samtbilanz auf. In der Nettobilanz muss daher lediglich die Arbeit bei den isothermen Schritten berücksichtigt werden: ∆W = ∆W1,2 + ∆W3,4
(5.123)
Dies führt durch Einsetzen zu: ∆W = RT1 ln (
V2 V3 ) + RT2 ln ( ) V1 V4
(5.124)
Aus der Adiabatengleichung ergeben sich die folgenden beiden Bedingungen: T1 V2κ−1 = T2 V3κ−1
(5.125)
T1 V1κ−1
(5.126)
=
T2 V4κ−1
Dividiert man die erste durch die zweite Gleichung, so erhält man: V2 V3 = V1 V4
(5.127)
Einsetzen in Gleichung (5.124) ergibt dann für die insgesamt verrichtete Arbeit der bei den isothermen Prozesse: ∆W = R(T1 − T2 ) ln (
V1 ) V2
(5.128)
Die abgegebene Wärme kann nicht mehr weiterverwendet werden. Es liegt daher na he, den Wirkungsgrad η einer solchen Wärmekraftmaschine aus dem Verhältnis von verrichteter Arbeit zu aufgenommener Wärme zu definieren: ∆W R(T1 − T2 ) ln ( V2 ) V1 η = = V2 ∆Q RT1 ln ( V1 )
(5.129)
Nach dem Vereinfachen dieses Bruches bleibt folgender Term übrig: η=
T1 − T2 T1
(5.130)
5.7 Erster Hauptsatz
| 167
Der Wirkungsgrad hängt somit lediglich von der Temperaturdifferenz zwischen bei den Wärmereservoirs ab, zwischen denen das System die Wärme hin und her trans portiert. Wenn man eine Carnot-Maschine in umgekehrter Richtung betreibt, dann er hält man eine sogenannte Kältemaschine, die Wärme von einem kälteren in ein wär meres Reservoir transportiert. Typische Beispiele für eine solche Kältemaschine sind Wärmepumpen oder Kühlschränke. Anstelle des Wirkungsgrads wird hierfür die Leis tungskennzahl angegeben, die als Verhältnis ∆Q1 (5.131) ∆W von abgegebener Wärmemenge ∆Q1 und in das System hineingesteckter Arbeit ∆W definiert ist, was exakt dem inversen Wirkungsgrad entspricht: ε=
ε=
T1 T1 − T2
(5.132)
Im Gegensatz zum Wirkungsgrad ist die Leistungszahl immer größer als 1. Sie gibt also an, wie groß die abgeführte Wärmeleistung pro Watt hineingesteckter elektri scher Leistung ist. Vernachlässigt man beim Carnot-Prozess die beiden adiabatischen Prozesse, die nichts zur mechanischen Arbeit beitragen, dann bleiben lediglich die isotherme Kompression und Expansion übrig. Hierbei handelt es sich um die best mögliche Überführung von Wärme in mechanische Energie. Es kann daher keine thermodynamische Maschine geben, die Wärme in Arbeit umwandelt und dabei ei nen Wirkungsgrad besitzt, der besser als der Carnot-Wirkungsgrad ist. Gleichzeitig kann es keine Kältemaschine geben, deren Leistungszahl besser als die einer umge kehrt laufenden Carnot-Maschine ist. Weil der Wirkungsgrad einer Wärmekraftmaschine immer kleiner als 1 ist und Wärme daher niemals vollständig in mechanische oder durch das Antreiben einer Tur bine in elektrische Energie umgewandelt werden kann, wird Wärmeenergie auch als minderwertige Energie bezeichnet. Die Umwandlung von hochwertiger elektrischer Energie in Wärme kann dagegen mit einem Wirkungsgrad von 1 durchgeführt werden. Dies liegt anschaulich darin begründet, dass die Bewegung von Teilchen in einem Stoff statistisch in alle Richtungen verteilt ist, während elektrische Energie, hervorge rufen durch den Fluss von Elektronen in einem Kabel, oder mechanische Energie bei der Bewegung eines Kolbens immer gerichtet ist.
5.7.3 Entropie Die Entropie ist ein Maß für die Unordnung eines Systems und gibt an, ob ein Prozess reversibel ist. Die mathematisch exakte Definition der Entropieänderung in einem ab geschlossenen System lautet: dQ (5.133) dS = T
168 | 5 Wärmelehre
Hierbei handelt es sich um den Quotienten der hinzu- oder abgeführten Wärmemenge dQ und der jeweiligen Temperatur T. Wenden wir diese Definition auf die isothermen Vorgänge beim Carnot-Prozess an, dann erhält man für die isotherme Expansion ana log zu Gleichung (5.129): ∆Q1 V2 ∆S1 = = R ln ( ) (5.134) T1 V1 Für die Entropie der isothermen Expansion gilt entsprechend: ∆S2 =
∆Q2 V2 = −R ln ( ) T2 V1
(5.135)
Damit ergibt sich in der Summe: ∆S = S1 + S2 = 0
(5.136)
Allgemein gilt, dass die Änderung der Entropie für einen reversiblen Vorgang immer 0 ist. Als Gegenbeispiel betrachten wir nun zwei Steine mit gleichen Massen und Wär mekapazitäten, aber unterschiedlichen Temperaturen. Wenn man diese so platziert, dass sie sich gegenseitig berühren, dann fließt die Wärme vom heißen zum kalten Stein, bis sich schließlich eine Mischtemperatur TM einstellt. Da die Wärme nicht ohne Hilfsmittel wieder zurückfließen kann, ist dieser Vorgang irreversibel. Mit ∆Q = mc∆T ergibt sich ∆S1 zu: TM
∆S1 = ∫ mc T1
dT TM ) = mc ln ( T T1
(5.137)
dT TM ) = mc ln ( T T2
(5.138)
Analog dazu erhält man für ∆S2 : TM
∆S2 = ∫ mc T2
Damit ergibt sich für die Summe unter Anwendung der Logarithmengesetze: ∆S = ∆S1 + ∆S2 = mc ln (
2 TM ) T1 T2
(5.139)
Die rechte Seite dieser Gleichung muss aufgrund der Definition der Mischtemperatur immer größer als 1 sein. Es gilt allgemein ∆S > 0 für die Änderung der Entropie bei einem irreversiblen Vorgang. In einem abgeschlossenen System kann die Änderung der Entropie daher lediglich konstant bleiben oder zunehmen, aber niemals kleiner werden. Wenn man davon ausgeht, dass das Universum ein abgeschlossenes System ist und die meisten Vorgänge irreversibel ablaufen, dann wird eines Tages ein Zustand erreicht, in dem die Entropie maximal ist und keine Arbeit mehr verrichtet werden kann. Dieser hypothetische Zeitpunkt, der allerdings sehr weit in der Zukunft liegt und sich momentan noch in der Diskussion befindet, wird als Wärmetod bezeichnet.
5.8 Diffusion
|
169
5.7.4 Zweiter Hauptsatz Für den zweiten Hauptsatz der Thermodynamik gibt es mehrere Möglichkeiten der Formulierung. Eine mögliche Schreibweise bezieht sich auf den maximal erreichba ren Wirkungsgrad einer Wärmekraftmaschine. Dieser hängt wie am Beispiel des Car not-Prozesses gezeigt lediglich von der Temperaturdifferenz zwischen zwei Wärme reservoirs ab und kann prinzipiell nie den Wert 1 annehmen. Dazu müsste die tie fere der beiden Temperaturen den Wert 0 K erreichen, was prinzipiell nicht möglich ist. Der zweite Hauptsatz sagt somit aus, dass es keine Möglichkeit gibt, Wärme mit 100%-iger Effizienz in mechanische Energie umzuwandeln, d. h., je dichter die Tem peraturen beieinander liegen, desto schlechter geschieht die Umwandlung in mecha nische Energie. So liegt der maximal erreichbare Wirkungsgrad von Ottomotoren etwa bei 40 %, wobei der genaue Wert von einigen Parametern abhängt. Eine äquivalente Formulierung des zweiten Hauptsatzes sagt, dass Wärme immer vom heißeren zum kälteren Körper fließt, aber nicht umgekehrt. Eine fiktive periodisch arbeitende Maschine, die ohne zusätzliche Energie von außen Wärme von einem käl teren in ein wärmeres Reservoir transportiert, würde somit dem zweiten Hauptsatz widersprechen und wird deshalb Perpetuum mobile zweiter Art genannt. Ein moder nes Beispiel, das dieses Prinzip verdeutlicht, sind Wärmepumpen, die Erdwärme zum Heizen in Wohnhäuser transportieren. Das Prinzip ist daher eng verwandt mit dem eines Kühlschranks. Da das Erdreich kälter als die Temperatur in einem Zimmer ist, muss zusätzlich elektrische Energie zugeführt werden, damit die Wärme entgegen der natürlichen Fließrichtung transportiert werden kann.
5.8 Diffusion Wir betrachten zunächst zwei Gefäße, die mit unterschiedlichen Gasen befüllt wurden, beispielsweise Wasserstoff und Helium. Verbindet man die beiden Gefä ße miteinander, so stellt man fest, dass sich die Gase nach einer längeren Zeitspanne vollkommen durchmischt haben. Da beide Gase denselben Druck und dieselbe Temperatur besitzen, erfolgt die Durchmischung lediglich aufgrund des Konzentra tionsunterschiedes dc/dx zwischen den Gasen, wobei wir uns der Einfachheit halber auf den eindimensionalen Fall beschränken. Um diesen Vorgang besser verstehen zu können, legen wir eine gedachte Refe renzebene zwischen die Gefäße. Aufgrund der statistischen Geschwindigkeitsvertei lung bewegen sich die Gasteilchen in alle Richtungen mit derselben Geschwindigkeit. Es diffundieren also pro Zeiteinheit einige Gasmoleküle aus einem Gefäß durch die Referenzebene in das jeweils andere Gefäß. Gleichzeitig wandern aber auch einige der Teilchen wieder zurück in das ursprüngliche Gefäß. Diffusion bezieht sich somit immer auf den Nettostrom von einem Behälter mit hoher Konzentration hin zu ei nem anderen Behälter mit niedriger Konzentration. Selbst wenn sich nach einiger Zeit
170 | 5 Wärmelehre
die Konzentrationsunterschiede ausgeglichen haben, wandern die Teilchen weiterhin zwischen den Gefäßen hin und her. Der Nettostrom ist hingegen 0, sodass die Diffu sion zum Erliegen kommt. Wenn man die Konzentrationsunterschiede als ursächliche Kraft annimmt, dann kann man analog zum Volumenstrom und der Druckdifferenz beim Gesetz von Hagen-Poiseuille folgenden linearen Zusammenhang zwischen der Nettostromdichte j und der Konzentrationsänderung dc/dx annehmen: j = −D
dc dx
(5.140)
Hierbei handelt es sich um das 1. Fick’sche Gesetz, das sich experimentell einfach be stätigen lässt. Die Proportionalitätskonstante D wird Diffusionskoeffizient genannt. Bei der Teilchenstromdichte handelt es sich um den Quotienten aus Teilchenstrom und Querschnittsfläche, weshalb sie die Einheit 1/(s m2 ) besitzt. Die Konzentration hingegen besitzt die Einheit 1/m3 . Somit erhält der Diffusionskoeffizient die Einheit m2 /s, damit linke und rechte Seite identisch sind. Entlang der sich bewegenden Teil chen fällt das Konzentrationsgefälle ab, d. h., die Steigung in Richtung des Diffusions stroms ist negativ. Aus diesem Grund wurde das Minuszeichen in der oben dargestell ten Gleichung eingeführt. Bis jetzt können wir lediglich den Diffusionsstrom für einen zeitlich konstanten Konzentrationsunterschied angeben. Durch den Diffusionsstrom werden hingegen laufend Teilchen transportiert, was eine Änderung des Konzentrationsgefälles zur Folge hat. Der Zusammenhang zwischen der zeitlichen Änderung der Konzentration und der Stromdichte lautet einfach: dc dj =− dt dx
(5.141)
Die Ableitung nach x muss durchgeführt werden, damit die Einheiten auf beiden Sei ten übereinstimmen. Wenn man hier das 1. Fick’sche Gesetz einsetzt, dann erhält man das 2. Fick’sche Gesetz: d2 c dc =D 2 dt dx
(5.142)
Das heißt, die zeitliche Änderung der Konzentration ist direkt proportional zur zwei ten Ableitung der Konzentration nach dem Ort. Die Fick’schen Gesetze liefern eine mathematische Beschreibung dafür, dass bereits kleinste Mengen CO2 (≈ 0,1 %) in der eingeatmeten Luft gefährlich sein können, wohingegen die 80 % Stickstoff in der Atmosphäre keine Probleme verursachen, denn das im menschlichen Körper erzeugte Kohlendioxid kann aus den Zellen umso schlechter heraus diffundieren, je mehr sich bereits in der eingeatmeten Luft befindet.
5.9 Osmose
| 171
5.9 Osmose Einseitige Diffusionsvorgänge werden unter dem Begriff der Osmose zusammenge fasst. Um diesen Vorgang besser verstehen zu können, betrachten wir zunächst zwei Gefäße, in denen sich ein Lösungsmittel befindet. In Gefäß 2 wurde zusätzlich noch ein Stoff in dem Lösungsmittel gelöst. Da die Flüssigkeitsoberflächen zu Beginn gleich hoch sein sollen, befindet sich in Gefäß 1 daher zu Beginn mehr Lösungsmittel als in Gefäß 2. Beide Gefäße sollen nun über eine spezielle, semipermeable Membran mit einander verbunden sein, die zwar die Teilchen des Lösungsmittels hindurchlässt, nicht aber die Teilchen des gelösten Stoffes. Dann stellt man fest, dass ein Teil des Lö sungsmittels aus Gefäß 1 in Gefäß 2 wandert und der Flüssigkeitsspiegel dort ansteigt. Dies geschieht so lange, bis sich in beiden Gefäßen dieselbe Anzahl an Lösungsmit telteilchen befindet. Dieser Vorgang ist in Abbildung 5.15 abgebildet.
Vorher
Nachher
Abb. 5.15: Verschiebung der Wasserpegel auf grund des osmotischen Druckes in einem U-Rohr mit semipermeabler Membran in der Mitte.
Beim Einströmen des Lösungsmittels in das Gefäß 2 entsteht dort ein Druck, der dem weiter einströmenden Lösungsmittel entgegen gerichtet ist. Dieser Druck wird negati ver osmotischer Druck genannt. Befindet sich auf beiden Seiten dieselbe Anzahl an Lö sungsmittelteilchen, so ist der osmotische Druck maximal und die Diffusion der Teil chen kommt zum Erliegen. Die Teilchen im Lösungsmittel lassen sich bei genügend großer Verdünnung (c < 1 mol/l) im Prinzip wie Teilchen eines idealen Gases behan deln, da ihr Abstand zueinander groß ist und Wechselwirkungsprozesse vernachläs sigt werden können. Der niederländische Chemiker Jacobus Henricus van ’t Hoff fand diesen Zusammenhang bereits im Jahr 1887 und stellte das nach ihm benannte Gesetz auf: πV = niRT (5.143) Hierbei steht i für den Van-’t-Hoff-Faktor, der angibt, in wie viele Teilchen ein Mo lekül im Lösungsmittel dissoziiert. Bei Glucose beispielsweise ist dieser Faktor 1, bei Natriumchlorid (NaCl) muss hingegen i = 2 eingesetzt werden, da es beim Lösen in Na+ - und Cl− -Ionen zerfällt. Die Gleichung ist im Prinzip identisch mit der allgemei nen Gasgleichung, wobei die Konzentration hier durch das Verhältnis Stoffmenge zu Volumen n c= (5.144) V
172 | 5 Wärmelehre
angegeben wird und der Druck mit π bezeichnet wird. Damit kann die Van-’t-HoffGleichung auch als π = ciRT
(5.145)
geschrieben werden. Auch für menschliche Zellen ist das Prinzip der Osmose überle benswichtig. Die Zellwände bestehen nämlich aus semipermeablen Membranen, wo durch bestimmte Stoffe in das Innere der Zelle gelangen können. Auf diese Weise kann je nach Art der Membran beispielsweise die Zufuhr von Nahrung oder Botenstoffen ge steuert werden. Erzeugt man in Gefäß 2 künstlich einen Druck, der auf das Lösungsmittel wirkt, dann wandert dieses in Gefäß 1 zurück und lässt die gelösten Stoffe in Gefäß 2 zu rück. Dieser Vorgang wird entsprechend Umkehrosmose genannt. Es gibt käuflich zu erwerbende Maschinen, die über dieses Prinzip gefiltertes Wasser bereitstellen, das eine deutlich geringere Konzentration an Keimen und chemischen Stoffen wie Kalk oder Nitrit beinhaltet.
5.10 Wärmetransport 5.10.1 Wärmeleitung Wärmeleitung ist eine Eigenschaft nahezu aller Festkörper und Flüssigkeiten. Aller dings hängt die Wärmeleitfähigkeit von physikalischen und chemischen Randbedin gungen ab. Gase leiten Wärme in der Regel schlecht, weshalb beispielsweise Styro por, das eine Form von Polystyrol ist, aufgrund des hohen Luftanteils in den Poren oft zu Isolationszwecken eingesetzt wird. Bei vielen Festkörpern gilt: Je besser ein Stoff den elektrischen Strom leitet, desto größer ist auch seine Wärmeleitfähigkeit. Metalle leiten Wärme daher sehr gut, wohingegen die meisten Kunststoffe eine deutlich ge ringere Wärmeleitfähigkeit aufweisen. In Flüssigkeiten ist die Kopplung der Teilchen untereinander geringer, weshalb die Fähigkeit, Wärme zu leiten, meistens deutlich geringer als bei Festkörpern, aber dennoch größer als die von Gasen ist. Wenn man eine Seite eines Körpers aufheizt und eine andere Seite kühlt, dann breitet sich die Wärme von der heißen zur kalten Seite aus. Anschließend bildet sich ein stationärer Zustand aus, der ein konstantes Temperaturgefälle entlang des Kör pers zur Folge hat. Dies lässt sich in etwa mit dem Spannungsabfall an einem elek trischen Widerstand vergleichen, der im nächsten Kapitel behandelt wird. Die Zeit, die bis zum Erreichen dieses stationären Zustandes vergeht, hängt von der Wärme leitfähigkeit und der Wärmekapazität der Körpers ab. Diese beiden Größen sind daher für viele thermodynamische Eigenschaften von Stoffen verantwortlich. Der Begriff der Wärmeleitfähigkeit soll nun im Folgenden quantitativ erfasst werden, wobei wir uns auf den stationären Zustand beschränken wollen.
5.10 Wärmetransport
| 173
In Analogie zur elektrischen Stromstärke lässt sich eine Wärmeleistung Q̇ mit der Einheit Watt angeben, die angibt, wie groß die übertragene Wärmemenge zwischen zwei Wärmereservoirs pro Zeiteinheit ist. Die elektrische Spannung kann dann, wie bereits erwähnt, mit der Temperaturdifferenz gleichgesetzt werden, da diese für das Fließen der Wärme verantwortlich ist. Intuitiv erwartet man, dass der Wärmestrom proportional zur Fläche des Körpers zunehmen muss. Gleichzeitig sollte er sich umge kehrt proportional zur Länge des Körpers verhalten, da die Wärmeleitfähigkeit umso kleiner wird, je weiter die Reservoirs auseinanderliegen. Daraus hat Fourier im Jahr 1822 das nach ihm benannte Fourier’sche Gesetz aufgestellt: A Q̇ = λ ∆T d
(5.146)
Die Größe λ ist eine Materialkonstante und nennt sich Wärmeleitfähigkeit. Ihre Ein heit ist demzufolge 1 W/(m K). Sie ist beispielsweise dafür verantwortlich, dass Was ser bei Raumtemperatur deutlich kühler wirkt als Luft, weil Wasser die Wärme vom Körper wesentlich besser ableitet. Auch Fliesen fühlen sich dadurch, dass sie Wärme gut leiten, im Gegensatz zu porösen Holzböden bei derselben Temperatur viel kälter an. Manchmal wird auch der Wärmewiderstand R eines Stoffes angegeben, der als Kehrwert der Wärmeleitfähigkeit definiert ist. Je größer dieser ist, desto schlechter transportiert ein Stoff die Wärme von einem Reservoir zu einem anderen. Wenn zwei (gleiche oder unterschiedliche) Stoffe aneinandergereiht werden, dann vergrößert sich effektiv die Länge des Körpers. Daraus folgt, dass sich die Wärmewiderstände R einfach aufaddieren lassen: Rges = R1 + R2 + ⋅ ⋅ ⋅ + R n
(5.147)
Verwendet man stattdessen die Wärmeleitfähigkeit, so müssen die Kehrwerte addiert und von der sich daraus ergebenden Zahl ebenfalls der Kehrwert gebildet werden.
Experiment: Wärmeleitung in Festkörpern Man kann das unterschiedliche Verhalten in der Wärmeleitung von verschiedenen Materialien de monstrieren, indem man Blöcke identischer Größe so platziert, dass diese jeweils an einem Ende zur selben Zeit erhitzt werden. An der jeweils gegenüberliegenden Seite wird ein Zündholz befes tigt. Sobald die Wärme das jeweilige Zündholz erreicht und die Temperatur groß genug ist, flammt es auf. Der Zeitpunkt variiert hierbei je nach Wärmeleitfähigkeit der Materialien.
174 | 5 Wärmelehre
5.10.2 Konvektion Neben der Wärmeleitung in Materialien durch Stöße innerer Teilchen kann Wärme ebenfalls durch direkten Stoffaustausch stattfinden. Diesen Vorgang nennt man Kon vektion. Beobachten lässt sich dieses Phänomen beispielsweise, wenn Sonnenlicht durch ein Fenster fällt, unter welchem sich ein aufgeheizter Heizkörper befindet. Die am Heizkörper erwärmte Luft steigt aufgrund ihrer geringeren Dichte auf, während von unten kalte Luft nachströmt. Der sich ändernde Brechungsindex aufgrund der Dichteschwankungen macht sich dann durch ein Flimmern in der Luft bemerkbar. Bei Kühlkörpern, die meistens aus wärmeleitfähigem Metall bestehen, wird diese Technik ausgenutzt, um elektronische Bauteile zu kühlen. Die Wärme wird dabei auf die Kühl rippen übertragen, die dann wiederum die Luft aufheizen. Die Wärmeleitfähigkeit von Luft wäre zum Abtransport der Hitze viel zu gering. Durch das Aufsteigen und Nach ziehen von kälterer Umgebungsluft kann aber die Wärmeabfuhr stark erhöht werden. Durch ein zusätzliches Anbringen von Ventilatoren wird die Konvektion unterstützt, sodass in der Praxis selbst mehrere Hundert Watt an Abwärme relativ einfach gekühlt werden können.
5.10.3 Wärmestrahlung Da wir die Wärme der Sonne auf der Erde spüren, sich aber keine feste Materie zwi schen Erde und Sonne befindet, die die Wärme zu uns transportieren könnte, muss es noch einen weiteren Mechanismus zum Übertragen von Wärme geben. Bereits im Jahr 1879 hatte Josef Stefan gezeigt, dass ein schwarzer Körper Wärmestrahlung aussendet. Er fand heraus, dass die Leistung proportional zur vierten Potenz der Temperatur an steigt. Er fand weiterhin eine Proportionalität zwischen der Leistung und der Größe der abstrahlenden Fläche. Die notwendige Proportionalitätskonstante σ wird StefanBoltzmann-Konstante genannt, da einige Jahre später Ludwig Boltzmann diese Be ziehung theoretisch hergeleitet hat. Es stellte sich außerdem heraus, dass glänzende Materialien und/oder Stoffe, die nicht vollständig schwarz sind, weniger Leistung ab strahlen. Das sogenannte Stefan-Boltzmann-Gesetz muss daher noch mit einem tem peraturabhängigen Korrekturfaktor, dem Emissionsgrad ε, multipliziert werden. Ins gesamt ergibt sich damit die vollständige Formulierung zu: P = εσAT 4
(5.148)
Die Stefan-Boltzmann-Konstante besitzt hierbei Wert: σ = 5,670374419 ⋅ 10−8
W m2 ⋅ K 4
(5.149)
Dies ist eine der wenigen Gesetzmäßigkeiten, in der eine physikalische Größe derart stark von Änderungen eines Parameters abhängt. Menschen strahlen aufgrund des
5.10 Wärmetransport
| 175
Abb. 5.16: Ein Wärmebild mit Temperaturanzei gen einiger markierter Punkte.
besprochenen Gesetzes in der Regel einige Kilowatt an Leistung ab, nehmen aber auch sehr viel Leistung aus der Umgebung auf, sodass sich insgesamt ein Gleichgewicht einstellt. Im Winter sind sternenklare Nächte deutlich kälter, weil Wolken die Strah lung von der Erde absorbieren und dementsprechend Wärmestrahlung auf die Erd oberfläche zurücksenden, wodurch sich eine höhere Temperatur einstellt. Der Emissionsgrad ist für die meisten Stoffe über einen großen Temperaturbe reich weitgehend konstant. Typische Werte von künstlich erzeugten und in der Na tur vorkommenden Stoffen reichen von etwa 0,9 bei dunklen und rauen Oberflächen bis runter zu sehr kleinen Werten um 0,01 bei stark polierten und glänzenden Me talloberflächen. Nach dem Kirchhoff’schen Strahlungsgesetz sind gute Absorber von Strahlung ebenfalls gute Emitter und umgekehrt. Dies lässt sich qualitativ damit be gründen, dass alle Körper im Universum ständig Strahlung aus der Umgebung, wie zum Beispiel den Zimmerwänden, aufnehmen. Wäre dann das Absorptionsverhalten besser als Emissionsverhalten, würde Wärme vom kälteren zum wärmeren Körper flie ßen, was wiederum den zweiten Hauptsatz der Thermodynamik verletzen würde. In berührungslosen Thermometern (sogenannte Pyrometer), welche meistens noch eine Laservorrichtung zum Zielen besitzen, wird die Wärmestrahlung von Ob jekten aufgenommen. Zur Fokussierung der Strahlung wird eine Linse benötigt, die durchlässig für fernes Infrarot ist. Kostengünstig kommen hierbei meistens Linsen aus Polyethylen (PE) zum Einsatz. Die Wärmestrahlung wird dann durch Aufheizen von in Serie geschalteten Thermosäulen in eine elektrische Spannung umgewan delt, welche unmittelbar in eine Temperatur umgerechnet werden kann. Wichtige Voraussetzung ist hierbei die Kenntnis über den Emissionskoeffizienten, der meis tens über ein angebrachtes Bedienfeld eingestellt werden kann. Für Thermometer zur Fiebermessung bei Patienten ist dieser meistens schon für eine Temperaturmessung an der Stirn oder im Ohr voreingestellt. Weiterhin gibt es die Möglichkeit, die Um gebung mithilfe von Wärmebildkameras zu analysieren. Hierbei kommen meistens hochwertige Linsen aus Germanium zum Einsatz, die ebenfalls durchlässig für Infra rotstrahlung sind. Der Sensor besteht aus einer Matrix aus Sensoren, die wie beim Pyrometer die Aufgabe haben, die Wärmestrahlung in elektrische Signale umzuwan
176 | 5 Wärmelehre
deln. Heutige Wärmebildkameras besitzen, wie Abbildung 5.16 zeigt, bereits sehr hohe Auflösungen, sodass auch kleinere Strukturen deutlich zu erkennen sind. Das mit einer Wärmebildkamera aufgenommene Bild zeigt einen Menschen mit norma ler Körpertemperatur vor einer Wand auf Zimmertemperatur. Die Kleidung hat einen isolierenden Effekt, sodass die gemessene Temperatur besonders im unteren Bereich deutlich geringer ist.
5.11 Zusammenfassung In diesem Kapitel sind die wichtigsten Gesetzmäßigkeiten der Wärmelehre behan delt worden. Nach einer kurzen Übersicht über die Temperaturskalen werden die Aggregatzustände von Materialien behandelt und die Phasenübergänge zwischen diesen Zuständen. Ein wichtiges Hilfsmittel hierzu bilden Phasendiagramme, de ren Funktionsweise genauer erläutert wird. Im weiteren Verlauf wird zunächst auf die physikalischen Eigenschaften fester und flüssiger Körper eingegangen, die auch als kondensierte Materie bezeichnet werden. Alle zum Verständnis dieser beiden Zustände notwendigen Begriffe wie Wärmekapazität, Schweredruck und Grenzflä chenspannungen werden dabei sehr genau beschrieben und hergeleitet. Nach den Betrachtungen von statischen Flüssigkeiten werden auch die strömenden Flüssig keiten behandelt, die sich insbesondere durch ihre innere Reibung auszeichnen. Ein besonderes Augenmerk liegt hierbei auf der Bernoulli-Gleichung zur mathemati schen Beschreibung laminarer Strömungen sowie dem Gesetz von Hagen-Poiseuille, mit dessen Hilfe beispielsweise Strömungen im menschlichen Blutkreislauf besser verstanden werden können. Da sich Gase stark von diesen beiden Zuständen unter scheiden, werden sie in einem gesonderten Abschnitt behandelt. Zunächst werden alle Gesetze speziell für ideale Gase abgeleitet und anschließend auf reale Gase erwei tert, was zur Van-der-Waals-Gleichung führt. Anhand der Beschreibung von thermo dynamischen Prozessen am Beispiel von Gasen werden die zugehörigen Hauptsätze hergeleitet, mit denen sich viele Vorgänge in der Natur beschreiben und verstehen lassen. Auch die Diffusion und die Osmose als wichtige physikalische Effekte werden in diesem Abschnitt genauer untersucht. Für den Wärmehaushalt des menschlichen Körpers spielt ebenfalls der Transport von Wärme eine wichtige Rolle. Daher sol len diese Zusammenhänge in dem darauffolgenden Abschnitt ausführlich betrachtet werden.
Aufgaben | 177
Aufgaben Aufg. 5.1: Ein Flüssigkeitsthermometer, das mit 1 ml Ethanol befüllt ist, erwärmt sich von 20 °C auf 25 °C. Welches neue Volumen stellt sich nach der Erwärmung ein? Aufg. 5.2: Ein Wasserkocher mit einer Leistung von 2 kW wird benutzt, um 1 l Wasser von 20 °C auf 80 °C zu erhitzen. Wie lange benötigt er dafür? Aufg. 5.3: Fünf heiße Steine (Granit) mit einer Temperatur von 500 °C und einer Masse von je 100 g werden in einen Eimer mit 5 l Wasser gelegt, wobei das Wasser zunächst eine Temperatur von 20 °C besitzt. Welche Mischtemperatur stellt sich anschließend ein? Aufg. 5.4: In einem Kochtopf befinden sich 2 kg Eis, das bereits auf eine Temperatur von 0 °C aufgeheizt wurde. Wie viel Energie muss dann noch in das System gesteckt werden, damit das Eis vollständig schmelzen kann? Aufg. 5.5: Wie hoch wäre eine Wassersäule, deren Schweredruck äquivalent zu einer 25 mm hohen Quecksilbersäule ist? Aufg. 5.6: Ein Würfel aus hartem Polystyrol besitze eine Kantenlänge von 1,5 cm und ein Gewicht von 3,68 g. Wie groß muss die Dichte von Salzwasser gewählt werden, damit der Würfel gerade schwebt? Aufg. 5.7: Wie viel Volumen kann ein Tropfen Wasser an der Unterseite einer Kapillare mit einem Durchmesser von 1 mm höchstens fassen, bevor er abreißt? Aufg. 5.8: Welche Steighöhe ist für Wasser in einer Glaskapillare mit einem Radius von 1 mm ungefähr zu erwarten? Aufg. 5.9: Wasser fließt mit einer Geschwindigkeit von 10 m/s durch ein Rohr mit ei nem Radius von 10 cm, das sich nach einer gewissen Strecke auf 5 cm verjüngt. Wie schnell strömt das Wasser dann in diesem Teil des Rohres? Aufg. 5.10: Ein Eimer besitze ein Loch, durch das Wasser herausfließt. Der Abstand zwischen Wasseroberfläche und Loch betrage 30 cm. Wie groß ist die Geschwindigkeit des austretenden Wasserstrahls? Aufg. 5.11: Ein Flachdach besitze eine Länge von 20 m und eine Breite von 10 m. Wie groß ist die resultierende Kraft auf das Dach bei einem Orkan mit einer Spitzenge schwindigkeit von 120 km/h? Aufg. 5.12: Eine Edelstahlkugel mit der Dichte 7.900 kg/m3 und einem Radius von 0,25 cm bewegt sich mit der konstanten Geschwindigkeit von 81,4 cm/s in einem Vis kosimeter, das mit Ethanol gefüllt ist. Die Dichte von Ethanol wurde als 789 kg/m3 bestimmt. Wie groß ist damit die Viskosität von Ethanol?
178 | 5 Wärmelehre Aufg. 5.13: Im Rahmen einer Labormessung mit einem Kapillarviskosimeter messen Sie einen Durchfluss von 100 m in 2,5 min durch eine Kapillare der Länge 20 cm und des Durchmessers 1 mm. Die Druckdifferenz zwischen den Enden der Kapillare betrage 5 kPa. Welche Viskosität hat die Flüssigkeit? Aufg. 5.14: Ein kubisches Gefäß mit der Seitenlänge 0,5 m wird bei Atmosphärendruck (105 Pa) und einer Temperatur von 27 °C mit Luft gefüllt. Anschließend wird der Be hälter gasdicht verschlossen und auf eine Temperatur von 127 °C gebracht. Welche resultierende Kraft wird dann auf jede Würfelseite ausgeübt? Aufg. 5.15: Eine Stoffmenge von 1 mol einer beliebigen Flüssigkeit verdampfe bei Raumtemperatur und Atmosphärendruck vollständig. Welches Gasvolumen nehmen die Teilchen ungefähr ein? Aufg. 5.16: In einem Gefäß befindet sich reiner Sauerstoff mit einer mittleren molaren Masse von 32 g/mol. Wie groß ist die mittlere Geschwindigkeit der Teilchen, wenn das Gas eine Temperatur von 100 °C besitzt? Aufg. 5.17: Wie groß ist die spezifische Molwärme eines Gases mit drei Freiheitsgraden ... a) bei konstantem Volumen? b) bei konstantem Druck? Aufg. 5.18: Die Höhe eines Hochhauses soll mithilfe eines Barometers gemessen wer den. Auf dem Erdboden wird ein Druck von 102,440 kPa gemessen. Nach dem Aufstei gen in das höchste Stockwerk reduziert sich der Druck auf 98,957 kPa. Wie hoch ist das Hochhaus, wenn die Dichte der Luft 1,2041 kg/m2 beträgt? Aufg. 5.19: In einem pneumatischen Feuerzeug wird das Volumen eines Luft-Ben zin-Gemischs adiabatisch auf 10 % verkleinert. Die Temperatur beträgt ursprünglich 20 °C. Auf welchen Wert steigt sie nach der Kompression an? Aufg. 5.20: Ein Gefrierschrank erzeuge eine Temperatur von −25 °C in seinem Innen raum. Die Außentemperatur beträgt 20 °C. Wie groß ist die maximale Leistungszahl des Gefrierschranks? Aufg. 5.21: Wie groß ist der osmotische Druck auf eine Zelle, die sich in einer Glucose lösung mit einer Konzentration von 0,5 mol/l bei einer Temperatur von 20 °C befindet? Aufg. 5.22: Zwischen zwei Wärmereservoirs der Temperaturen 0 °C und 100 °C soll ein Wärmestrom von 1 kJ/s erreicht werden. Wie groß muss dazu der Querschnitt ei ner 1 m langen Eisenstange mit einem Wärmeleitkoeffizienten von 120 W/(m K) min destens sein? Aufg. 5.23: Wie groß ist die abgestrahlte Leistung der Wärmestrahlung einer schwar zen Oberfläche mit einer Fläche von 5 m2 und einem Emissionsgrad von 0,9? Die Tem peratur betrage 50 °C.
6 Elektrizitätslehre 6.1 Übersicht Die Anwendung von Elektrizität spielt sowohl im technischen als auch im medizini schen Bereich eine wichtige Rolle. Zu Beginn werden die wichtigen Eigenschaften der Elektrostatik zusammengefasst und hierbei wird auch auf physikalische Effekte des Alltags eingegangen. Anschließend wird auf bewegte Ladungen in Form von elektri schem Strom übergeleitet. Dieser Abschnitt beinhaltet neben technischen Bauteilen und deren physikalischer Beschreibung auch die Erzeugung von elektrischer Span nung am Beispiel von galvanischen Elementen. Magnetfelder als Resultat von fließen den Strömen und deren Wechselwirkung mit geladenen Teilchen werden im folgenden Abschnitt ausführlich behandelt. Zur Anwendung kommen die zuvor hergeleiteten Zu sammenhänge bei der Beschreibung elektrischer Schaltkreise und deren Bauteile wie Spulen oder Kondensatoren. Nach der Behandlung von Wechselstrom und dessen Er zeugung wird auf die daraus resultierenden elektromagnetischen Wellen eingegangen und deren Spektrum genauer untersucht.
6.2 Elektrostatik 6.2.1 Geschichte Die Elektrostatik beschäftigt sich mit der Wechselwirkung zwischen ruhenden elek trischen Ladungen. Bereits einige Jahrhunderte vor Christus war bekannt, dass Bern stein, der an einem Wolltuch gerieben wurde, andere Gegenstände anziehen konn te, sofern diese nicht zu schwer waren. Das griechische Wort für Bernstein ist elec tron, woraus sich die heutigen Wörter wie Elektrizität und Elektrostatik entwickelt haben. Im 18. Jahrhundert fand man durch Untersuchungen heraus, dass es zwei un terschiedliche Arten von Elektrizität gibt. Wenn man beispielsweise ein leichtes Stück aus Kork mit einem an Seide geriebenen Stab aus Glas berührt, dann stößt der Glas stab es ab. Dieselbe Beobachtung kann ebenfalls mit einem Stab aus Harz gemacht werden, wenn man damit nach dem Reiben an Wolle oder Seide die Korkstücke be rührt. Vermischt man allerdings die verschiedenen Korkstücke, dann beobachtet man eine Anziehung zwischen einigen von ihnen. Benjamin Franklin hat kurz darauf die Begriffe positive und negative Elektrizität für diese Beobachtungen eingeführt. Heute weiß man, dass das Universum aus Atomen aufgebaut ist, die im Wesentlichen aus zwei Ladungen bestehen. Die Träger der negativen Ladung sind die Elektronen in der Atomhülle, wohingegen die Protonen im Atomkern eine betragsmäßig gleiche, aber positive Ladung besitzen. Beide Ladungen kompensieren sich gegenseitig, sodass Ato me nach außen neutral sind. https://doi.org/10.1515/9783110692921-006
180 | 6 Elektrizitätslehre
6.2.2 Elektrisches Feld Jede elektrische Ladung erzeugt ein elektrisches Feld. Elektrische Felder sind genau wie Gravitationsfelder richtungsabhängig und werden daher mit Vektoren beschrie ben. Bei der Anwesenheit von mehreren Ladungen müssen die elektrischen Felder in jedem Punkt vektoriell addiert werden. Bringt man eine Ladung in ein elektrisches Feld, dann wirkt auf die Ladung eine Kraft. Wenn die Ladung klein genug ist, um das vorhandene Feld nicht zu beeinflussen, dann ist das elektrische Feld definiert als Quo tient von Kraft und elektrischer Ladung: F⃗ E⃗ = q
(6.1)
Die Einheit der Ladung q ist Coulomb (C), wobei die kleinste in der Natur vorkommen de Ladungsmenge die Elementarladung ist: e = 1,602176634 ⋅ 10−19 C
(6.2)
Deren Betrag ist identisch mit der Ladung eines Protons beziehungsweise Elektrons. Das Elektron hat demzufolge die Ladung q = −e und das Proton q = +e. Elektrische Felder werden mithilfe von Feldlinien veranschaulicht. Die Feldlinien des elektrischen Feldes sind so gerichtet, dass sie von positiven Ladungen weg und zu negativen Ladungen hin zeigen, wie in Abbildung 6.1 für eine positive und eine ne gative Ladung zu sehen ist. Sie geben in jedem Punkt die Richtung des elektrischen Feldes an. Beim Konstruieren von Feldlinienbildern ist daher zu beachten, dass sich Feldlinien niemals überschneiden dürfen. Die Dichte der Feldlinien ist dabei ein Maß für die Stärke des Feldes an dieser Stelle. Das zweidimensionale Feldlinienbild für die Überlagerung von zwei gleichen und unterschiedlichen Ladungen ist in Abbildung 6.2 dargestellt. Die gestrichelten Linien repräsentieren hierbei einen Schnitt durch die so genannten Äquipotenzialflächen, auf denen das Potenzial immer gleich groß ist. Wür de man folglich eine dritte, vernachlässigbar kleine Ladung auf einer solchen Äqui potenzialfläche bewegen, verrichtet man keine Arbeit – analog zu einem Objekt, das man parallel zur Erdoberfläche bewegt. Elektrische Felder werden häufig zur Beschleunigung und Ablenkung von Ladun gen verwendet. Wenn sich eine freie Ladung in einem elektrischen Feld befindet, so dass eine Kraft auf diese ausgeübt wird, dann wird die Ladung beschleunigt. Die Be schleunigung lässt sich dann einfach dadurch bestimmen, dass die Kraft durch die Masse m der Ladung geteilt wird: a⃗ =
q E⃗ F⃗ = m m
(6.3)
Die Masse des Elektrons wurde beispielsweise experimentell zu m e = 9,1093837015 ⋅ 10−31 kg
(6.4)
6.2 Elektrostatik | 181
Abb. 6.1: Die Feldlinienverläufe für positive und negative Ladungen.
Abb. 6.2: Eine Skizze der Feldlinien zwischen zwei Ladungen mit ungleichem und gleichem Vorzei chen. Die gestrichelten Linien repräsentieren einen Schnitt durch die Äquipotenzialflächen.
bestimmt. Da die Beschleunigung konstant ist, lässt sich die Bewegung mithilfe des Weg-Zeit-Gesetzes wie folgt schreiben: ⃗ = s(t)
1 2 1 q E⃗ 2 at⃗ = t 2 2 m
(6.5)
Im allgemeinen Fall bewegt sich eine Ladung in einem homogenen und zeitlich kon stanten elektrischen Feld, analog zu einem Objekt im Gravitationsfeld der Erde, ent lang einer Parabelbahn. Für den Spezialfall einer Bewegung senkrecht zu den Feld linien des elektrischen Feldes ergibt sich somit analog zum waagerechten Wurf die folgende Beziehung zwischen der Ablenkung in y-Richtung und der Bewegung in x-Richtung: y(x) = −
1 qE x2 2 m v2
(6.6)
Die Bewegung einer positiven Ladung in einem homogenen elektrischen Feld ist in Abbildung 6.3 zu sehen.
182 | 6 Elektrizitätslehre
q
v
E
y F
x
Abb. 6.3: Ablenkung einer elektrischen Ladung in einem homogenen elektrischen Feld zwischen zwei Platten.
Diese Technik der Ablenkung spielte bei alten Oszillografen, in denen das Bild mittels eines Elektronenstrahls erzeugt wurde, eine wichtige Rolle. Die Elektronen be wegen sich durch ein elektrisches Feld, das sich zeitlich mit dem angelegten Signal verändert. Wenn die Elektronen anschließend auf einen Leuchtschirm treffen, ist der zeitliche Verlauf der abgebildeten Kurven identisch mit dem zu untersuchenden Si gnal. 6.2.2.1 Influenz In einem Metall sind viele Elektronen leicht beweglich. Durch das Anlegen eines elek trischen Feldes wandern sie zur Oberfläche des Objekts, weshalb sie freie Ladungen genannt werden. Die Verschiebung findet so lange statt, bis die elektrischen Feldli nien senkrecht auf der Metalloberfläche stehen. Dieses Phänomen wird als Influenz bezeichnet. Da die elektrischen Feldlinien nun von der Metalloberfläche ausgehen, muss das Innere des Objekts feldfrei sein. In der Technik wird dieses Phänomen in Form von faradayschen Käfigen eingesetzt, um beispielsweise empfindliche Elektro nik vor elektrischer Zerstörung zu schützen. Da Flugzeuge und Autos die Bedingun gen des faradayschen Käfigs recht gut erfüllen, sind Personen darin beispielsweise im Falle eines Blitzeinschlags gut geschützt.
Abb. 6.4: Foto eines ungeladenen Elektroskops mit beweglichem Zeiger, der mit der zugehöri gen Metallhalterung leitend verbunden ist.
6.2 Elektrostatik | 183
Experiment: Elektroskop Ein Elektroskop (Abbildung 6.4) besteht aus einem drehbar gelagerten Metallzeiger, der in ein sta biles Metallgehäuse eingefasst und mit diesem leitend verbunden ist. Bringt man einen gelade nen Glasstab in die Nähe der oberen Elektrode, verschieben sich die Elektronen im Elektroskop. Dadurch laden sich sowohl Zeiger als auch die Halterung positiv auf und stoßen sich gegenseitig ab, wodurch der Zeiger je nach Ladungsmenge deutlich ausschlagen kann.
6.2.2.2 Polarisation Die meisten in der Natur vorkommenden Stoffe sind hingegen elektrische Isolatoren. Legt man eine Spannung an einen solchen Isolator, wie zum Beispiel Glas oder Kera mik, an, dann können sich die Elektronen im Material nicht bewegen. Jedoch können sie sich im Bereich innerhalb ihres zugehörigen Atoms oder Moleküls verschieben. Dies hat zur Folge, dass sich die negativen Ladungsschwerpunkte der Elektronen ge genüber den positiven Ladungsschwerpunkten der Atomkerne verschieben und elek trische Dipole entstehen. Diese werden üblicherweise als induzierte Dipole bezeich net, weil sie durch ein äußeres elektrisches Feld erzeugt werden. Der gesamte Vor gang wird Polarisation genannt. Durch die Polarisation wird ein Teil des elektrischen Feldes kompensiert, was eine Verkleinerung der Feldstärke im Innern eines Isolators zur Folge hat. Aufgrund der Dipolbildung nennt man einen Isolator, der sich in einem elektrischen Feld befindet und eine Polarisation ausbildet, deshalb auch Dielektrikum. Im Vakuum existieren keine Ladungen. Daher kann hier auch keine Polarisation stattfinden. In Gasen wie Luft macht sich der Unterschied zum Vakuum bei Raum temperatur und Atmosphärendruck erst in der vierten Nachkommastelle bemerkbar. Polare Flüssigkeiten wie Wasser oder Alkohol weisen dagegen eine relativ große Po larisierbarkeit auf. Experiment: Ablenkung eines Wasserstrahls Bringt man einen geriebenen und elektrostatisch aufgeladenen Glas- oder Kunststoffstab in die Nähe eines dünnen Wasserstrahls, dann sieht man wie dieser merklich in Richtung des Stabes abgelenkt wird. Der Grund hierfür sind eine Polarisation der Wassermoleküle und die daraus fol genden Kräfte, die vom geladenen Stab auf die Moleküle ausgeübt werden.
6.2.3 Coulomb’sches Gesetz Charles Augustin de Coulomb fand um das Jahr 1785 herum heraus, dass sich elek trisch geladene Körper um so stärker anziehen, je näher sie sich kommen. Analog zum Massepunkt in der Mechanik verwendet man in der Elektrizitätslehre den Begriff der punktförmigen Ladung, die selbst keine Ausdehnung besitzt. Während dies für Elek
184 | 6 Elektrizitätslehre
tronen sehr gut erfüllt ist, da diese nach heutigem Kenntnisstand Punktteilchen sind, gilt die Annahme für Protonen lediglich näherungsweise. Wenn man geschlossene Flächen um eine Ladung herum legt, laufen alle Feldli nien der Ladung durch diese Flächen. Multipliziert man an jeder Stelle die Feldstärke skalar mit dem zugehörigen Flächenstück und summiert dann alle Ergebnisse auf, dann erhält man einen Wert, der proportional zur eingeschlossenen Ladung ist. Ma thematisch schreibt man dies mithilfe des geschlossenen Integrals: ∮ E⃗ ⋅ dA⃗ =
Q ε0
(6.7)
Diese Beziehung wird Gauß’scher Satz der Elektrostatik genannt. Der Kehrwert von ε0 ist die Proportionalitätskonstante, wobei sich der Wert dieser elektrischen Feldkon stante ε0 zu As ε0 = 8,8541878128 ⋅ 10−12 (6.8) Vm ergibt. Die hier verwendeten Einheiten Ampere (A) und Volt (V) werden etwas später eingeführt. Im Falle von Kugelflächen und punkt- oder kugelförmigen Ladungen steht das elektrische Feld senkrecht auf der Fläche und zeigt entsprechend in Richtung ih res Normalenvektors. Das Flächenintegral auf der linken Seite ergibt somit einfach den Betrag der Feldstärke multipliziert mit der Kugelfläche. Daraus folgt: 4πr2 E =
Q ε0
(6.9)
Stellt man diese Gleichung nach E um und multipliziert sie mit der Ladung q, um daraus die Kraft zu berechnen, dann erhält man das Coulomb’sche Gesetz für zwei beliebige Punktladungen q1 und q2 : F⃗ C =
1 q1 q2 ̂ r⃗ 4πε0 r2
(6.10)
Der Einheitsvektor des Abstandsvektors r ⃗ auf der rechten Seite der Gleichung symboli siert die radial nach außen gerichtete Kraft, wie wir es bei der Gravitation bereits ken nengelernt haben. Die von Coulomb aufgeschriebene Gesetzmäßigkeit erinnert daher sehr stark an das Newton’sche Gravitationsgesetz, wenn man die Massen durch La dungen ersetzt. Der Unterschied liegt lediglich in der Konstanten, die beim Gravitati onsgesetz mit G bezeichnet wurde und beim Coulomb’schen Gesetz durch die elektri sche Feldkonstante ersetzt wird. Befinden sich die Ladungen zusätzlich in einem Dielektrikum, dann wird die Kraft aufgrund der verringerten Feldstärke ebenfalls kleiner. Dazu wird die einheitenlose Dielektrizitätszahl ε r eingeführt, die auch relative Permittivität genannt wird. Für das ideale Vakuum ist diese Zahl exakt 1. Für Gase mit einer geringen Dichte, wie zum Bei spiel Luft, kann sie mit relativ guter Genauigkeit als 1 angenommen werden. Tabelle 6.1 gibt eine Übersicht über die Dielektrizitätszahlen einiger Materialien.
6.2 Elektrostatik | 185
Tab. 6.1: Die Dielektrizitätszahlen einiger ausgewählter Materialien. Material
Dielektrizitätszahl ε r
Keramik Glas Tentalpentoxid Wasser Bariumtitanat
2...6 6...8 27 88 103 . . . 104
Häufig wird die Dielektrizitätszahl ε r direkt mit der elektrischen Feldkonstante ε0 multipliziert angegeben. Die sich daraus ergebende Zahl ε = ε0 ε r
(6.11)
wird üblicherweise als Permittivitätskonstante bezeichnet und ist demzufolge eben falls eine materialabhängige Größe. Damit lässt sich das Coulomb’sche Gesetz (in Be tragsform) schreiben als: FC =
1 q1 q2 4πε0 ε r r2
(6.12)
Der größte Unterschied zwischen der Gravitation und elektrischen Kraft sind so mit die Stärke der Wechselwirkung und die Tatsache, dass es negative und positive La dungen, aber nur positive Massen gibt. Aus diesem Grund gibt es keine Möglichkeit, Massen gegeneinander abzuschirmen und Orte mit verschwindender Gravitation zu erzeugen, wohingegen die uns umgebende Welt weitgehend frei von starken elektri schen Feldern ist.
6.2.4 Potenzial und Spannung In der Mechanik wurde bereits der Begriff der potenziellen Energie eingeführt. Für ein radiales Gravitationsfeld haben wir die potenzielle Energie gegen einen weit entfern ten Punkt hergeleitet, indem wir über das Gravitationsgesetz integriert und die obere Grenze des Integrals gleich unendlich gesetzt haben. In der Elektrostatik ist es mög lich, nach demselben Prinzip vorzugehen, wenn die Kraft F⃗ als analytische Funktion angegeben werden kann: ∞
Epot = ∫ F⃗ ⋅ ds⃗
(6.13)
R
Setzt man für die Kraft das Coulomb’sche Gesetz ein, dann erhält man für die poten zielle Energie zweier Punktladungen gegen unendlich: ∞
Epot = ∫ R
q1 q2 1 q1 q2 dr = 4πε0 r2 4πR
(6.14)
186 | 6 Elektrizitätslehre
Um den sich daraus ergebenden Wert unabhängig von q2 zu machen, hat man das elektrische Potenzial eingeführt, das als Quotient von potenzieller Energie und Ladung definiert ist: Epot q
φ=
(6.15)
Für das Potenzial einer Punktladung ergibt sich damit: φ=
Q , 4πR
(6.16)
wobei hier q1 zur besseren Unterscheidung durch Q ersetzt wurde. Es ist sofort er sichtlich, dass wir dasselbe Ergebnis aus Gleichung (6.13) erhalten hätten, wenn wir für F⃗ die Definition der elektrischen Feldstärke eingesetzt hätten: ∞
φ=
Epot = ∫ E⃗ ⋅ ds⃗ q
(6.17)
R
Bewegt man eine Ladung von einem Punkt A zu einem Punkt B, dann ist die po tenzielle Energie der Ladung gegenüber unendlich nicht besonders hilfreich. Stattdes sen möchte man die Potenzialdifferenz zwischen diesen beiden Punkten berechnen können. Diese Potenzialdifferenz wird auch als elektrische Spannung bezeichnet und lässt sich wie folgt berechnen: ∞
∞
U = ∆φ = φ B − φ A = ∫ E⃗ ⋅ ds⃗ − ∫ E⃗ ⋅ ds⃗ B
(6.18)
A
Die elektrische Spannung wird mit dem Formelbuchstaben U gekennzeichnet und be sitzt die Einheit Volt (V), die nach dem italienischen Physiker Alessandro Volta be nannt wurde. Führt man die Integration in Gleichung (6.18) explizit aus, verschwinden die Terme mit den Grenzen unendlich aufgrund der Differenz und man erhält die De finition der elektrischen Spannung, die gegeben ist durch das Integral über das elek trische Feld von einem Punkt A zu einem Punkt B. B
U = ∫ E⃗ ⋅ ds⃗
(6.19)
A
Die potenzielle Energie beziehungsweise die verrichtete Arbeit wiederum lässt sich daraus zu Epot = qU ableiten.
(6.20)
6.3 Elektrischer Strom
| 187
Um die Endgeschwindigkeit der Ladung nach dem Durchlaufen des Feldes zu er halten, kann der Energieerhaltungssatz verwendet werden. Zusammen mit der Arbeit, die das elektrische Feld verrichtet, kann dieser als qU =
1 2 mv 2
(6.21)
geschrieben werden. Die Endgeschwindigkeit ergibt sich dann durch Umstellen nach v: v=√
2qU m
(6.22)
Diese hängt lediglich von der Potenzialdifferenz, nicht aber von der Länge der Be schleunigungsstrecke ab. Wenn man ein Elektron in einem elektrischen Feld mit der Potenzialdifferenz von 1 V beschleunigt, dann hat dieses Elektron nach dem Durchlau fen dieser Spannung eine kinetische Energie von ca. 1,6 ⋅ 10−19 J. Bei der Betrachtung kleiner Ladungen ist die Einheit Joule deshalb sehr unhandlich. Hier hat es sich einge bürgert, stattdessen auf die Einheit Elektronenvolt (eV) zurückzugreifen. Ein Elektron hat nach dem Durchlaufen der Spannung definitionsgemäß eine Energie von 1 eV. So mit erhält man für den Umrechnungsfaktor E[eV] = eE[J]
(6.23)
zwischen Elektronenvolt und Joule.
6.3 Elektrischer Strom 6.3.1 Gefahren Elektrischer Strom stellt immer eine potenzielle Gefahr für Lebewesen dar. Bereits ge ringe Stromstärken können die Herztätigkeit beeinflussen. Höhere Stromstärken füh ren zusätzlich zu Verbrennungen an der Haut. Da die meisten technischen Anlagen mit Wechselspannung bei 50 oder 60 Hertz arbeiten, gibt es hier die meisten Untersu chungen. Die Wahrnehmungsschwelle liegt bei etwa 0,5 mA, allerdings wird ein Krib beln erst bei Stromstärken ab etwa 3 mA deutlich. Ab einer Stärke von 12 mA entstehen Muskelkrämpfe, die ein Loslassen der Kabel unmöglich machen. Bei 40 mA liegt etwa die Grenze, ab welcher Herzrhythmusstörungen und Zwerchfellverkrampfungen auf treten können. Schon bei 80 mA tritt selbst bei kurzer Einwirkung von unter 300 μs Herzkammerflimmern auf, das meistens den Tod zur Folge hat.
188 | 6 Elektrizitätslehre
6.3.2 Stromrichtung Der elektrische Strom wird von fließenden Elektronen in einem elektrisch leitenden Material erzeugt. Damit ein Strom fließen kann, muss der Leiter, zum Beispiel ein Kupferdraht, an eine Spannungsquelle angeschlossen werden. Aufgrund der Poten zialdifferenz werden die Elektronen vom Minuspol der Spannungsquelle zum Pluspol gedrückt. Da ein elektrischer Stromkreis immer geschlossen sein muss, d. h. keine La dungen abfließen können, muss der Strom in der Spannungsquelle vom Plus- zum Minuspol weiterfließen. In diesem Buch wird zur Vereinfachung die sogenannte tech nische Stromrichtung verwendet. Die Stromrichtung ist hierbei vom Plus- zum Minus pol, also der physikalischen Stromrichtung entgegengesetzt gerichtet.
6.3.3 Stromstärke Physikalisch ist die Stromstärke definiert als die Ladungsmenge, die pro Zeiteinheit durch den Querschnitt eines elektrischen Leiters fließt. Die mathematische Beschrei bung der Stromstärke ist demzufolge gegeben durch die Ableitung der Ladung Q nach der Zeit t. I=
dQ dt
(6.24)
Die Einheit des elektrischen Stromes ist Ampere (A), was genau einem Coulomb pro Sekunde entspricht. In Abbildung 6.5 ist die Wanderung der Elektronen durch einen Leiter in physikalischer Stromrichtung dargestellt. Das Gerät zum Messen des elek trischen Stroms wird daher auch Amperemeter genannt und in einem Schaltbild mit einem A gekennzeichnet. Analog dazu wird das Messgerät, mit dem die elektrische Spannung gemessen wird, als Voltmeter bezeichnet und mit einem V deutlich ge macht. Bereits bei einer Stromstärke von einigen Milliampere, also einer Stromstärke, die in der Technik häufig vorkommt, wird eine große Anzahl an Ladungsträgern durch den Draht bewegt. Wir beschränken uns bei allen weiteren Betrachtungen zunächst auf Gleichstrom, d. h., die Elektronen im Leiter fließen alle zu jedem Zeitpunkt mit der gleichen Stromstärke in dieselbe Richtung. Die Stromstärke entspricht in diesem Fall −
+
e
Abb. 6.5: Elektronen bewegen sich in einem elektrischen Leiter in physikalischer Strom richtung vom negativen zum positiven Pol einer Spannungsquelle.
6.3 Elektrischer Strom
| 189
der Anzahl n der Elementarladungen e, die pro Zeitfenster T von einer Sekunde durch den Querschnitt des Leiters fließen: I=
ne T
(6.25)
Obwohl sich das elektrische Feld im Leiter mit Lichtgeschwindigkeit ausbreitet, bewegen sich die Elektronen im Draht lediglich mit einer sehr kleinen Geschwindig keit von meistens unter 1 mm/s. Die Tatsache, dass eine Glühbirne beim Einschalten dennoch sofort leuchtet, lässt sich daher gut mit einem Wasserschlauch vergleichen, der bereits mit Wasser gefüllt an einen Wasserhahn angeschlossen wird. Sobald man den Wasserhahn aufdreht und damit einen Druck erzeugt, fließt das Wasser am ande ren Ende des Schlauchs nahezu gleichzeitig heraus. Das elektrische Feld breitet sich demzufolge wie eine Welle im Draht aus und wechselwirkt mit allen Elektronen nahe zu gleichzeitig. Je nach Leitfähigkeit eines Materials unterscheidet man zwischen den elektri schen Leitern, Isolatoren und Halbleitern. Zu den elektrischen Leitern mit einem sehr geringen elektrischen Widerstand gehören Metalle wie Gold, Kupfer und Aluminium. Prinzipiell gilt: Je besser ein Material die Wärme leitet, desto geringer ist auch der elek trische Widerstand. Beispiele für Isolatoren sind Glas, Keramik und die Kunststoffe. Halbleiter liegen mit ihrer Leitfähigkeit zwischen den Leitern und Isolatoren, wobei eine exakte Abgrenzung manchmal schwierig ist. Als typische Halbleiter, die in der Technik häufig in ihrer elementaren Form eingesetzt werden, gelten Silizium (Si) und Germanium (Ge). Der Mensch besitzt zwar einen hohen elektrischen Widerstand, ist aber dennoch kein perfekter Isolator. Außerdem schwankt dessen Widerstand stark mit der vorhandenen Feuchtigkeit, sodass unter bestimmten Bedingungen selbst kleine Spannungen zu lebensgefährlichen Strömen führen können.
6.3.4 Elektrischer Widerstand 6.3.4.1 Ohmsches Gesetz In einem elektrischen Leiter sind die Elektronen aufgrund thermischer und quanten theoretischer Effekte ständig in Bewegung. Die Geschwindigkeit kann hierbei bis zu ca. 10 % der Lichtgeschwindigkeit betragen. Da die Geschwindigkeit allerdings in alle Richtungen etwa gleich groß ist, bleibt sie im Mittel an derselben Stelle im Leiter. Legt man nun eine elektrische Spannung und damit ein elektrisches Feld an einen Lei ter an, dann erfahren die Elektronen aufgrund der daraus resultierenden Kraft eine Beschleunigung. Durch Stöße mit den Atomkernen im Leiter ergibt sich letztlich eine konstante Geschwindigkeit, welche Driftgeschwindigkeit genannt wird. Die Geschwin digkeit der Elektronen muss folglich proportional zum elektrischen Feld und damit zur Spannung sein. Aus theoretischen Überlegungen ergibt sich, dass diese Driftge
190 | 6 Elektrizitätslehre U V R
∆U
A ∆I
U U
I
Abb. 6.6: Die Messung der Proportionalität von Strom und Spannung an einem ohmschen Wider stand. Der Wert des Widerstandes ergibt sich aus dem Steigungsdreieck.
schwindigkeit im Bereich von einigen Zentimetern pro Sekunde liegt. Da der elektri sche Strom wiederum proportional zur Geschwindigkeit ist, erhält man einen linearen Zusammenhang zwischen der Stromstärke und der angelegten Spannung. Experimentell lässt sich dieses Gesetz mit einer Schaltung wie in Abbildung 6.6 einfach bestätigen: Wenn man eine elektrische Spannung an einen Draht anlegt, dann stellt man experimentell fest, dass die Stromstärke proportional zur Spannung zu nimmt. Aufgrund der Maschenregel muss die Spannung am Widerstand identisch mit der angelegten Spannung U sein, sofern der Innenwiderstand des Strommessgerätes vernachlässigbar klein ist. Es gilt daher die Proportionalität: U∝I
(6.26)
Die Proportionalitätskonstante wird ohmscher Widerstand genannt und in der Regel mit R bezeichnet: ∆U = R∆I (6.27) Damit lässt sich das ohmsche Gesetz, zum besseren Einprägen auch URI-Regel ge nannt, in einer seiner drei Varianten wie folgt aufschreiben: R=
U I
(6.28)
Die Einheit des elektrischen Widerstandes ist Ohm (Ω). Mithilfe der folgenden Überlegung kann eine Brücke zur Bewegung von Flüssig keiten in einem Rohr geschlagen werden: Wenn man im Gesetz von Hagen-Poiseuille den Volumenstrom durch die Stromstärke und den Druckabfall durch die elektrische Spannung ersetzt, dann erhält man unmittelbar das ohmsche Gesetz: I=
U R
,
(6.29)
wobei der Kehrwert der Konstanten zu R zusammengefasst wurde. Genauso wie der Volumenstrom in einem Rohrsystem konstant sein muss, ist auch die Stromstärke in
6.3 Elektrischer Strom
U1
U2
R1
R2
|
191
Abb. 6.7: Ein einfacher Spannungsteiler, der aus zwei in Reihe geschalteten Widerständen besteht.
einem Kreis konstant. Dieser Sachverhalt lässt sich aus der Tatsache ableiten, dass La dung nicht erzeugt oder vernichtet beziehungsweise einen anderen Weg nehmen kann als durch den Leiter. Befinden sich daher mehrere Widerstände in einem Stromkreis, fließt durch alle Widerstände derselbe Strom I, wobei die Widerstände jeweils unter schiedliche Werte haben können. An jedem Widerstand fällt dann eine Spannung ab, die sich unter Anwendung des ohmschen Gesetzes mit U = RI
(6.30)
berechnen lässt. Dieses Prinzip wird bei Spannungsteilern verwendet, die im einfachs ten Fall lediglich aus mehreren in Reihe geschalteten Widerständen bestehen, welche an eine Spannungsquelle angeschlossen werden. Über jedem einzelnen Widerstand lässt sich dann eine unterschiedliche Spannung messen und abgreifen. Dieser Zu sammenhang ist in Abbildung 6.7 dargestellt. Hier wurden zwei Widerstände an eine Spannungsquelle angeschlossen. 6.3.4.2 Spezifischer Widerstand Experimentell stellt man fest, dass der Widerstand eines Drahtes mit der Länge an steigt. Je Größer der Querschnitt des Drahtes ist, desto kleiner wird hingegen der Wi derstand. Beides deckt sich mit der Intuition, wenn man zum Vergleich ein Rohr mit fließendem Wasser betrachtet. Für den elektrischen Widerstand gilt daher folgender Zusammenhang: R = ϱ0
l A
(6.31)
Die Größe ϱ 0 wird spezifischer Widerstand genannt und ist eine Materialeigenschaft. Generell gilt, dass ein Material den elektrischen Strom umso besser leitet, je besser seine Wärmeleitfähigkeit ist. 6.3.4.3 Temperaturabhängigkeit Neben Länge und Querschnitt hat ebenfalls noch die Temperatur Auswirkungen auf den Widerstandswert eines Materials. Sowohl die thermische Geschwindigkeit der Elektronen als auch die Stöße mit den Gitteratomen nehmen mit höheren Tempera turen weiter zu, was effektiv zu einer Vergrößerung des spezifischen Widerstandes
192 | 6 Elektrizitätslehre
führt. Für nicht zu große Temperaturänderungen ist die Änderung des Widerstandes nahezu proportional zur Temperatur. Im Bereich um die Raumtemperatur herum gilt dann für die Änderung des spezifischen Widerstandes: ∆ϱ = ϱ 0 α∆T ,
(6.32)
wobei der Temperaturkoeffizient α als Proportionalitätskonstante eingeführt wird. Die ser Koeffizient hängt wie ϱ 0 vom Material ab. Typischerweise wird ϱ 0 bei 20 °C ge messen und angegeben. Der Gesamtwiderstand berechnet sich gemäß der folgenden Formel: ϱ = ϱ 0 + ∆ϱ (6.33) Einsetzen von Gleichung (6.32) liefert schließlich: ϱ = ϱ 0 (1 + α∆T)
(6.34)
Dieser Zusammenhang wird bei widerstandsbasierten Thermometern eingesetzt, in dem aus der Änderung des Widerstandswertes auf Temperatur geschlossen wird. In Tabelle 6.2 sind die spezifischen Widerstände einiger Stoffe sowie deren Temperatur koeffizienten zusammengefasst. Tab. 6.2: Die spezifischen Widerstände und Temperaturkoeffizienten einiger Materialien. Material
Spezifischer Widerstand [Ω ⋅ mm2 /m]
Temperaturkoeffizient [1/K]
Gold Kupfer (rein) Konstantan Kohlenstoff Muskelgewebe
2,214 ⋅ 10−2 1,721 ⋅ 10−2 0,5 350 2 ⋅ 106
3,9 ⋅ 10−3 3,9 ⋅ 10−3 5 ⋅ 10−5 2 ⋅ 10−4
6.3.4.4 Leitwert In machen Fällen wird statt des Widerstandes der Leitwert eines Bauteils angegeben. Dieser wird mit G bezeichnet und ist als der Kehrwert des Widerstandes definiert: G=
1 R
d
(6.35)
Für die Einheit des Leitwerts wird in der Regel Siemens (S) benutzt. Allerdings sind auch Ω−1 oder mho (Ohm rückwärts geschrieben) gebräuchliche Einheiten. Die Ver wendung richtet sich gewöhnlich nach der jeweiligen Region.
6.3 Elektrischer Strom
| 193
6.3.4.5 Halbleiter Für Halbleiter gelten das ohmsche Gesetz sowie die beschriebene Temperaturabhän gigkeit nicht oder nur teilweise. In einem Halbleiter sind die Elektronen am absolu ten Temperaturnullpunkt wie bei einem Isolator fest in der Kristallstruktur gebunden. Durch Hinzuführen von Energie, zum Beispiel in Form von Wärme, können die Elek tronen allerdings aus dem Kristallverbund herausgelöst werden und sind dann wie in einem Leiter frei beweglich. Bei Temperaturen über 0 K gibt es immer einige Elektro nen, die diese Austrittsarbeit überwinden können, wobei die Leitfähigkeit nicht ein fach linear, sondern sogar exponentiell mit der Temperatur zunimmt. An der Stelle des herausgelösten Elektrons entsteht dann eine positive Ladung, die bei Halbleitern als Loch bezeichnet wird. Die Erzeugung eines Elektron-Loch-Paars wird deshalb auch Generation genannt. Springt ein Elektron in eines der Löcher eines Nachbaratoms, sodass sich beide gegenseitig vernichten, dann nennt man diesen Vorgang Rekombi nation. Legt man nun eine äußere Spannung an, dann bewegen sich die Elektronen entlang des elektrischen Feldes, wohingegen die Löcher in die entgegengesetzte Rich tung wandern.
6.3.5 Stromleistung Wir haben bereits einen Zusammenhang zwischen der Energie und der Spannung her geleitet. Um die Ladung zwischen zwei verschiedenen Orten mit unterschiedlichen Potenzialen zu bewegen, ist die Arbeit W = qU
(6.36)
notwendig. Zur Berechnung der Stromleistung muss diese Formel gemäß Definition nach der Zeit abgeleitet werden, sodass man folgenden wichtigen Zusammenhang er hält: P = UI
(6.37)
Durch die Reibungsverluste der Elektronen beim Zusammenstoß mit den Atomkernen wird die gesamte Arbeit im Leiter in Wärme umgewandelt, wodurch sich der Leiter aufheizt. Die Wärmeabgabe von fließendem Strom wird im Alltag an verschiedenen Stellen angewendet. Herdplatten und Wasserkocher sind dabei nur zwei von vielen möglichen Beispielen von Geräten, die aus Widerständen bestehen, in denen die Ener gie des Stroms in Wärmeenergie umgewandelt wird. Mithilfe des ohmschen Gesetzes kann man ebenfalls eine der beiden Größen eli minieren und die Leistung beispielsweise in Abhängigkeit des Stroms P = RI 2
(6.38)
schreiben. Eine Schmelzsicherung, die bei zu hoher Leistungsentnahme durchbrennt und den Stromkreis unterbricht und damit zur Absicherung von elektrischen Anlagen
194 | 6 Elektrizitätslehre
und Geräten verwendet wird, hängt nach diesen Betrachtungen lediglich vom Qua drat der Stromstärke ab. In einem Automobil findet man solche Sicherungen vor je dem Verbraucher, um die Batterie und die Lichtmaschine vor zu hohen Strömen zu schützen. Die quadratische Abhängigkeit von der Stromstärke ist ebenfalls der Grund für die hohen Übertragungsspannungen von Überlandstromleitungen, welche bis zu einigen Hundert Kilovolt betragen kann. Um die gleiche Leistung an den Endverbrau chern bereitzustellen, ist es daher möglich, den Strom niedrig zu halten, sodass die Verlustleistung in den Leitungen selbst bei langen Übertragungswegen lediglich im einstelligen Prozentbereich liegt. Es ist auch möglich, den Strom zu eliminieren. Damit ergibt sich eine Abhängig keit vom Spannungsabfall am Widerstand: P=
U2 R
(6.39)
Die elektrische Arbeit, die in einem Stromkreis verrichtet wird, ist im allgemeinen Fall das Integral über die Leistung nach der Zeit. Bei vielen Verbrauchern ist die aufge nommene Leistung über die Zeit hingegen konstant. In diesem Fall vereinfacht sich die Rechnung zu dem Produkt aus Leistung und Zeit: W = Pt
(6.40)
Die Einheit der Energie ist zwar Joule. Dennoch hat es sich in elektrischen Anwen dungen eingebürgert, die Energie als das Produkt von Watt und Sekunde anzugeben. 1 Wattsekunde (Ws) entspricht damit 1 Joule. Stromzähler in Gebäuden und Laboren messen die Energie dagegen in der größeren Einheit Kilowattstunde (kWh), damit die Zahlenwerte nicht zu groß werden.
6.3.6 Kirchhoff’sche Regeln Bereits im Jahr 1845 hatte Gustav Robert Kirchhoff die nach ihm benannten Kirch hoff’schen Gesetze hergeleitet, um damit beliebige Anordnungen von elektrischen Bauteilen berechnen zu können. Insgesamt gibt es zwei dieser Regeln: die Knotenund die Maschenregel. 6.3.6.1 Knotenregel Wenn sich elektrische Leitungen in einem Punkt treffen, dann bezeichnet man die sen Punkt als Knoten. Genauso wie in einem geschlossenen Rohrsystem der Vo lumenstrom einer inkompressiblen Flüssigkeit immer konstant sein muss (HagenPoiseuille), darf sich auch die Stromstärke in einem Stromkreis nicht verändern. Daraus folgt, dass die Summe aller einfließenden Ströme gleich der Summe der ab fließenden Ströme sein muss und der Knoten neutral bleibt. Dies ist die Formulierung
6.3 Elektrischer Strom
| 195
U2
I3 I2
R2
U1
R3
R1
I4 I1
I5
U3
R5
R4
U4
U5
Abb. 6.8: Illustration der Kirchhoff’schen Regeln mit Beispielen zur Knotenregel (links) und Ma schenregel (rechts).
der Knotenregel, die auch 1. Kirchhoff’sches Gesetz genannt wird und für n zu- und abfließende Ströme mathematisch als n
∑ Ik = 0
(6.41)
k=1
geschrieben werden kann. Aus Gründen der Konvention werden zufließende Ströme als positive Wert und abfließende Ströme mit einem negativen Vorzeichen versehen. Auf der linken Seite von Abbildung 6.8 ist die Knotenregel am Beispiel von 5 Strö men illustriert. I2 und I4 sind hierbei abfließende Ströme, wohingegen I1 , I3 und I5 in den Knoten hineinfließen. Dies wurde in dem abgebildeten Stromkreis durch die Richtung der Pfeile deutlich gemacht. Mithilfe der Knotenregel ergibt sich damit: − I1 + I2 − I3 + I4 − I5 = 0
(6.42)
Natürlich können auch alle Vorzeichen umgedreht werden, ohne dass sich der Wert der Summe ändert.
6.3.7 Maschenregel Neben der Stromstärke muss auch die Energie in einem Stromkreis erhalten sein. Da die Energie unmittelbar mit der elektrischen Spannung verknüpft ist, müssen sich die Teilspannungen eines Umlaufs in einer Masche immer zu 0 addieren, d. h., für n Wi derstände in einer Masche muss gelten: n
∑ Uk = 0 k=1
(6.43)
196 | 6 Elektrizitätslehre
Die Vorzeichen ergeben sich analog zur Knotenregel aus der Fließrichtung des Stroms. Die Umlaufrichtung kann beliebig gewählt werden, aber die Vorzeichen müssen bei umgekehrter Richtung entsprechend angepasst werden. Die Maschenregel ist auf der rechten Seite von Abbildung 6.8 mithilfe von 5 unterschiedlichen Widerständen dar gestellt. Da der Strom in dieser Masche überall in dieselbe Richtung fließt, ergibt sich für die Summe der Teilspannungen: U1 + U2 + U3 + U4 + U5 = 0
(6.44)
Beim Einsetzen der Spannung ist allerdings immer auf die Wahl des richtigen Vor zeichens zu achten. Befindet sich eine Spannungsquelle in der Masche, so müssen entweder die Quellspannung oder die Einzelspannungen mit einem Minus als Vorzei chen versehen werden.
6.3.8 Flüssigkeiten & Gase 6.3.8.1 Leitung in Gasen Ein neutrales Gas verhält sich bei nicht zu großen Spannungen wie ein Isolator. In der Realität sind allerdings immer einige Gasteilchen durch thermische Stöße oder Wechselwirkung mit radioaktiver Strahlung ionisiert, sodass freie Ionen und Elektro nen vorliegen. In einem genügend großen Volumen, dem sogenannten Debye-Volu men, sind daher immer genauso viele positive wie negative Ladungsträger vorhanden. Bringt man Elektroden in ein solches Gasvolumen ein und legt dann ein elektrisches Feld an, dann stellt man fest, dass die Stromstärke proportional zur Spannung an steigt, d. h., es gilt das ohmsche Gesetz relativ genau. Bei höheren Spannungen stellt sich zunächst eine Sättigung ein. Der Strom bleibt nun über einen größeren Span nungsbereich weitgehend konstant. Diese Sättigung lässt sich mit der begrenzten An zahl zur Verfügung stehenden Ladungsträgern und der relativ konstanten Erzeugung neuer Elektron-Ionen-Paare erklären. Ab einer gewissen Spannung ist die elektrische Feldstärke allerdings so groß, dass die Elektronen, die aus der negativ geladenen Elektrode herausgelöst werden, weitere Gasmoleküle ionisieren. Diese Spannung nennt man Zündspannung. Hierauf entsteht eine sogenannte Gasentladung, die sich in Form eines Lichtbogens bemerkbar macht und mit einem Blitz bei einem Gewitter vergleichbar ist. Solange die Gasentladung durch äußere Ionisationsprozesse aufrechterhalten wird, spricht man von unselbst ständiger Entladung. Ist hingegen die Feldstärke so groß, dass sich die Ladungsträger in der Gasentladung lawinenartig verstärken, steigt der Leitwert mit der Stromstär ke und es entsteht eine selbstständige Entladung. Der Strom wird dadurch beliebig groß, was zur Zerstörung der gesamten Apparatur führen kann, solange dieser nicht auf andere Weise begrenzt wird. Dies kann zum Beispiel mit einem vorgeschalteten Widerstand erreicht werden. Gasentladungen werden technisch beim Elektroschwei ßen und bei Kohlebogenlampen, die eine intensive Lichtquelle darstellen, eingesetzt.
6.3 Elektrischer Strom
|
197
Durch die Ionisation der Luftmoleküle entsteht allerdings auch Ozon, das beim län geren Einatmen zu einer Vergiftung führt. 6.3.8.2 Elektrolyse Wenn man eine Ionenverbindung, wie zum Beispiel Kochsalz, das aus einer Verbin dung der Elemente Natrium und Chlor besteht, in Wasser löst, dann spalten sich die Verbindungen in positiv und negativ geladene Ionen auf. Diesen Vorgang nennt man in der Chemie Dissoziation. Im Falle von Kochsalz entsteht dann eine wässrige Lösung mit positiv geladenen Natriumionen und negativ geladenen Chlorionen. Eine solche Lösung nennt man Elektrolyt, weil diese aufgrund der in ihr vorkommenden Ionen den Strom leiten kann. Platziert man zwei Elektroden in einem gewissen Abstand zuein ander in dieser Lösung und legt eine elektrische Spannung an, dann fließt ein elek trischer Strom zwischen ihnen, der zunächst umso größer ist, je mehr Ionen gelöst sind. Solange die Konzentration nicht zu hoch ist, stellt man den zu erwartenden linearen Zusammenhang zwischen Konzentration und Stromstärke fest. Ist die Kon zentration hingegen zu hoch, so sind die unterschiedlich geladenen Ionen nicht mehr räumlich voneinander getrennt, sodass die Anziehung zwischen ihnen überwiegt. Dies führt dann bei zu hohen Konzentrationen insgesamt zu einer Abnahme des Stroms. Die Leitfähigkeiten des Elektrolyten hängen zusätzlich noch von der Viskosi tät des Lösungsmittels, in diesem Fall Wasser, und der Temperatur der Lösung ab. Je zähflüssiger das Lösungsmittel ist, desto geringer ist die Stromstärke. Da die Viskosität einer Flüssigkeit mit steigender Temperatur abnimmt, steigt auch die Beweglichkeit der Moleküle und somit die Leitfähigkeit. Eine höhere Temperatur bedeutet eben falls eine höhere thermische Energie, was zur Folge hat, dass weniger Energie gegen das elektrische Feld der Ionen aufgebracht werden muss. Somit bewirkt eine höhere Temperatur insgesamt eine bessere Leitfähigkeit der Lösung. Durch den Stromtransport im Elektrolyten werden an der negativ geladenen Elek trode (Kathode) Elektronen an die positiv geladenen Na+ -Ionen abgegeben, wohinge gen an der positiv geladenen Elektrode (Anode) Elektronen von den Cl− -Ionen auf genommen werden. Dadurch werden an beiden Elektroden die jeweiligen Elemente, in diesem Fall also Natrium und Chlor, in ihrer Reinform abgeschieden. Das Natri um kann allerdings nicht in seiner elementaren Form entnommen werden, weil die Natriumatome sofort mit dem Wasser zu Natronlauge reagieren. Bei dieser Reaktion entsteht Wasserstoff, der zusammen mit dem Chlor als Gas entweicht. Die gesamte Reaktion der Elektrolyse von Kochsalz lautet demzufolge: 2NaCl + 2H2 O → 2NaOH + H2 + Cl2
(6.45)
Dieser Vorgang ist auf der linken Seite von Abbildung 6.9 anhand einer einfachen Ver suchsanordnung mit Kohleelektroden in einer wässrigen Lösung dargestellt. Man ver
198 | 6 Elektrizitätslehre
−
+
Zink
I
Kupfer
Salzbrücke
I
SO SO
2− 4
2− 4
SO
2− 4 Cu 2+
Zn 2+ Zn 2+ SO
2− 4
Zn 2+
SO
2− 4
Cu 2+ SO
2− 4
Cu 2+
Abb. 6.9: Eine mögliche Anordnung zur Elektrolyse von chemischen Stoffen (links) und ein einfacher Aufbau einer galvanischen Zelle mit einer Zink- und Kupferelektrode (rechts).
wendet häufig Kohle- oder Platinelektroden, weil diese chemisch inert und somit nicht an der Reaktion beteiligt sind. Im Folgenden betrachten wir den allgemeinen Fall z-fach positiv geladener Ionen. In diesem Fall müssen z Elektronen aufgenommen und abgegeben werden, um die Elemente in ihrer Reinform zu erhalten. Die aufgenommene und abgegebene Ladung für N Atome berechnet sich dann gemäß: q = zNe
(6.46)
Um den Strom berechnen zu können, muss gemäß der Definition der Stromstärke an schließend noch durch die Zeit geteilt werden. I=
q zNe = t t
(6.47)
Mithilfe der Avogadro-Konstanten kann aus der Anzahl N die Stoffmenge berechnet werden: zmN A e I= (6.48) Mt Möchte man anstelle der Stoffmenge die Masse berechnen, muss die molare Masse M der Atome mit berücksichtigt werden. Damit ergibt sich nach der Zeit t umgestellt: t=
mzN A e MI
(6.49)
Mit dieser Formel kann folglich die Zeit ausgerechnet werden, die notwendig ist, um ein Element mit der Masse m durch Elektrolyse abzuscheiden. Zu Ehren von Michael
6.3 Elektrischer Strom
| 199
Faraday, der als Erster die Methode Elektrolyse wissenschaftlich untersucht hat, kann das Produkt N A e zur sogenannten Faradaykonstanten zusammengefasst werden: F = NA e
(6.50)
Diese besitzt folglich den sehr genau bestimmbaren Wert: F = 9,64853321233100184 ⋅ 104
As mol
(6.51)
Damit lässt sich der oben beschriebene Zusammenhang schreiben als: t=
mzF MI
(6.52)
Manchmal soll eine Elektrolyse innerhalb einer bestimmten Zeit durchgeführt wer den. In diesem Fall muss die Formel nach I umgestellt werden, um die dafür benötigte Stromstärke zu berechnen. 6.3.8.3 Galvanische Zellen Wenn man beispielsweise Zinksulfat in Wasser löst, dann erhält man zweifach positi ve geladene Zinkionen Zn2+ und zweifach negative geladene Sulfationen SO2− . Bringt man nun einen Stab aus reinem Zink in die Flüssigkeit ein, so treten Zinkionen vom Stab in die Flüssigkeit ein. Da sich der Stab dadurch leicht negativ auflädt, gibt er ei nige der Elektronen wieder an die Zinkionen ab, sodass elementares Zink entsteht. An der Grenzschicht zwischen Stab und Flüssigkeit kommt es daher ständig zu einem Austausch von Ionen und Elektronen. Bringt man nun einen Kupferstab in dieselbe Lösung, stellt man fest, dass sich ein Teil der Zinkionen an diesem Stab als elementares Zink abscheiden. Dadurch werden Elektronen aus dem Kupferstab abgegeben, sodass sich dieser schwach positiv auflädt. Verbindet man jetzt beide Stäbe mit einem elektrischen Leiter, so lässt sich ein elektrischer Strom zwischen ihnen messen. Die Elektronen wandern in diesem Fall von der negativ geladenen Zinkelektrode zur positiv geladenen Kupferelektrode. Da sich die Elektronen jetzt im Vergleich zur Elektrolyse in umgekehrter Richtung bewe gen, wird bei galvanischen Zellen der Pluspol als Kathode und der Minuspol als Anode bezeichnet. Ein solcher Aufbau, bestehend aus zwei Elektroden mit unterschiedlichen Materialien und einem Elektrolyten zwischen ihnen, wird galvanische Zelle genannt. Das elektrische Potenzial der einzelnen Elektroden lässt sich nicht direkt messen, wohl aber das Potenzialgefälle, also die elektrische Spannung, zwischen den Elek troden. Während zwischen den Elektroden Strom fließt, lagern sich mehr und mehr Zink atome an der Kupferelektrode an. Gleichzeitig wandern immer mehr Zinkionen in die
200 | 6 Elektrizitätslehre
Lösung, sodass sich der Zinkstab langsam auflöst. Wenn die Kupferelektrode vollstän dig mit Zink bedeckt ist, keine Zinkionen mehr zur Verfügung stehen oder der Zinkstab vollständig zersetzt wurde, kommt der Stromfluss zum Erliegen, d. h., die Batterie ist leer. Um die Kapazität zu erhöhen, gibt es für diesen Fall prinzipiell zwei Möglich keiten: Man kann zum einen die Elektrolytlösung durch Kupfersulfat ersetzen, damit mehr Kupferionen zur Verfügung stehen, die sich an der Kupferelektrode anlagern können. Eine andere Möglichkeit ist die räumliche Trennung beider Elektroden in zwei unterschiedlichen Gefäßen. Die Zinkelektrode befindet sich in einer Zinksulfatlösung, wohingegen sich die Kupferelektrode in einer Kupfersulfatlösung befindet. Um einen Strom fließen zu lassen, muss ein Ionenaustausch der negativ geladenen Ionen ge währleistet sein. Dazu wird eine Salzbrücke (auch Ionenbrücke genannt) verwendet, die im Einfachsten aus einem in Salzwasser getränkten Papierstreifen besteht, dessen Enden jeweils in eine der beiden Lösungen getaucht sind. Wichtig hierbei ist, dass die Zinkionen nicht direkt in das andere Gefäß wandern können, da die Zelle sonst kurz geschlossen ist. Ein möglicher Aufbau ist auf der rechten Seite in Abbildung 6.9 zu sehen. 6.3.8.4 Batterien & Akkus Herkömmliche Batterien bestehen aus einer Reihenschaltung von galvanischen Ele menten, um damit eine ausreichend große Spannung zur Verfügung zu stellen. Um die Kapazität und maximal lieferbare Stromstärke zu erhöhen, können außerdem noch weitere Zellen parallel damit verbunden sein. Allerdings ist es wichtig, dass alle Zel len exakt dieselbe Spannung bereitstellen, da sonst Ausgleichsströme zwischen den unterschiedlichen Potenzialen fließen und sich die Batterie damit schneller entleert. Da das Potenzial eines Elements nicht direkt messbar ist, hat man sich auf eine Nor mierung durch eine Standardelektrode geeinigt. Diese besteht aus einer von gasförmi gem Wasserstoff umspülten Graphitelektrode, die per Definition das Potenzial 0 V zu gewiesen bekommt. Die Potenziale anderer Elemente werden dann relativ dazu in der sogenannten elektrochemischen Spannungsreihe angegeben. Ausgewählte Elemente, die in der Elektrochemie und bei Batterien eine wichtige Rolle spielen, sind in Tabel le 6.3 aufgelistet. Batterien, die nach der Entleerung entsorgt werden müssen, nennt man Pri märzellen. In Europa ist heutzutage die Alkali-Mangan-Batterie die am häufigsten verwendete Primärzelle, wohingegen früher die Zink-Kohle-Batterie weitverbreitet war. Die Alkali-Mangan-Rundzelle, deren Aufbau in Abbildung 6.10 skizziert ist, be steht im Wesentlichen aus einem Gel aus Zinkpulver, das bei der Reaktion oxidiert wird. Die Elektronen wandern über einen eingefassten Stift zu einer Metallplatte. Umgegeben ist das Zinkgel von einem Elektrolyten aus Kalilauge, die die negativ geladenen OH− -Ionen von der Anode zur Kathode weiterleitet. Die zylinderförmige Anode besteht aus Mangandioxid und umfasst die gesamte Zelle, die sich in einem Metallbecher befindet, der elektrisch von der Anode isoliert sein muss, damit es nicht
6.3 Elektrischer Strom
| 201
Tab. 6.3: Auszug der elektrochemischen Spannungsreihe für ausgewählte Elemente. Element
Oxidiert
Reduziert
Potenzial [V]
Gold Quecksilber Silber Kupfer Wasserstoff Blei Nickel Zink Magnesium Lithium
Au3+
Au Hg Ag Cu H Pb Ni Zn Mg Li
+1,5 +0,85 +0,80 +0,34 0 −0,13 −0,23 −0,76 −2,36 −3,04
Hg2+ Ag+ Cu2+ H+ Pb2+ Ni2+ Zn2+ Mg2+ Li+
Mangandioxid Elektrolyt (Kalilauge)
Zink-Gel
Anode
Stift
Metallzylinder (Kathode)
Abb. 6.10: Aufbau einer handelsüblichen Al kali-Mangan-Batterie. Die Kathode bildet den Pluspol, wohingegen die Anode den Minuspol darstellt.
zu einem Kurzschluss kommt. Sowohl die Oxidation als auch die Reduktion laufen in mehreren Schritten ab. Die Hauptreaktion lässt sich dabei schreiben als: Zn + 2MnO2 + 2H2 O + 2OH− → [Zn(OH)4 ]2− + 2MnO(OH)
(6.53)
Das elektrochemische Potenzial von Mangandioxid (Braunstein) beträgt +0,74 V, wo hingegen Zink das Potenzial −0,76 V aufweist. Die Differenz aus beiden Potenzialen ergibt eine Spannung von 1,5 V, was handelsüblichen Haushaltsbatterien entspricht. Neben den Primärzellen gibt es noch die Sekundärzellen. Bei dieser Art von Batte rien lässt sich die Reaktion durch Anlegen einer äußeren Spannung umkehren, d. h., sie lassen sich wieder aufladen. Sie können also Energie speichern und werden da her Akkumulatoren (kurz Akkus) genannt. Typische Akkus, die heutzutage meistens verwendet werden, sind Blei- oder Lithium-Ionen-Akkus. Bleiakkus werden häufig in Fahrzeugen eingesetzt, um die Elektronik mit Strom zu versorgen, weil diese Akkuty pen auch bei niedrigen Temperaturen noch viel Leistung abgeben können. Die Katho de besteht hierbei aus einer Bleiplatte mit einer Bleioxidschicht. Für die Anodenplatte wird hingegen reines Blei verwendet. Die Gesamtreaktion, die für das Laden und Ent laden gilt, lässt sich damit als Pb + PbO2 + 2 H2 SO4 2 PbSO4 + 2 H2 O
(6.54)
202 | 6 Elektrizitätslehre
schreiben. Aus der Spannungsreihe lässt sich für die Anodenreaktion eine Spannung −0,36 V und für die Kathodenfunktion +1,68 V ablesen. Die Gesamtspannung beträgt somit ca. 2 V pro Zelle. Um eine Spannung von 12 V wie bei einer Pkw-Batterie zu er halten, müssen demzufolge 6 Zellen in Reihe geschaltet werden.
6.3.9 Thermoelektrizität Den Zusammenhang zwischen Wärme und Elektrizität kann man sehr gut beim soge nannten Seebeck-Effekt beobachten, der nach seinem Entdecker Thomas Seebeck be nannt wurde. Um diesen Effekt zu verstehen, betrachten wir zunächst einen dünnen Draht aus einem beliebigen Material, in diesem Fall zum Beispiel Eisen. Wenn man eine der beiden Seiten erhitzt, dann bewegen sich die Elektronen dort schneller und benötigen demzufolge mehr Raum. Auf der kälteren Seite gibt es daher einen gerin gen Elektronenüberschuss, was zu einer kleinen Potenzialdifferenz zwischen beiden Enden führt. Um diese messen zu können, muss an den Enden des Drahtes je eine Kontaktstelle zu einem anderen Material, wie beispielsweise Kupfer, erzeugt werden. In diesem Fall erhält man ein sogenanntes Thermoelement. Die Potenzialdifferenz ent steht dann durch einen Temperaturunterschied zwischen diesen beiden Kontaktstel len und den unterschiedlichen Konzentrationen an Elektronen in beiden Materiali en. Analog zur elektrochemischen Spannungsreihe lässt sich auch für die so erzeugte thermoelektrische Spannung eine Tabelle mit positiven und negativen Seebeck-Koeffi zienten erstellen, wobei die Spannung proportional zur Differenz dieser Koeffizienten und dem Temperaturunterschied der Kontaktstellen ist: U = (S2 − S1 )∆T
(6.55)
Thermospannung sind in der Regel klein und bewegen sich im Bereich einiger Mikro volt pro Kelvin. Man kann auch den umgekehrten Weg gehen und eine externe Span nungsquelle an die beiden Kupferdrähte anschließen. Dann stellt man fest, dass sich eine der Kontaktstellen abkühlt, während die jeweils andere warm wird. Dies ist in ge wisser Weise eine Umkehrung des zuvor beschriebenen Effekts und wird Peltier-Effekt. Beide Effekte werden in der Industrie genutzt, um beispielsweise Abwärme in elek trische Energie umzuwandeln, oder in handelsüblichen Kühlboxen zum Kühlen von Getränken. Allerdings ist der Wirkungsgrad, also die Effizienz der Energieumwand lung, in beiden Fällen nicht sehr gut. Eine andere Anwendung der thermoelektrischen Spannung sind berührungslose Infrarotthermometer. Hierbei werden entsprechend viele Thermoelemente in Reihe geschaltet, um eine ausreichend große Spannung zu erzeugen. Die erzeugte Spannung ist dann weitgehend proportional zur Temperatur des zu messenden Objekts.
6.4 Magnetfelder |
203
6.4 Magnetfelder 6.4.1 Magnetfeldlinien Elektrische und magnetische Felder hängen eng miteinander zusammen, zeigen in der Praxis jedoch verschiedene Gesetzmäßigkeiten. Während man bei elektrischen La dungen die Begriffe positiv und negativ verwendet, werden die Pole eines Magneten mit Nordpol und Südpol bezeichnet. Nord- und Südpole unterschiedlicher Magnete wirken anziehend aufeinander, wohingegen gleichnamige Pole sich gegenseitig ab stoßen. Magnetfeldlinien sind im Gegensatz zu elektrischen Feldlinien immer in sich geschlossen, d. h., es gibt keine natürlich vorkommenden magnetischen Ladungen. Frei existierende magnetische Monopole, die analog zur elektrischen Ladung ledig lich einen Nord- oder Südpol besitzen, konnten bisher experimentell nicht nachge wiesen werden. In einem Magneten verlaufen die Feldlinien daher im Außenbereich vom Nord- zum Südpol, wie Abbildung 6.11 am Beispiel eines Stabmagneten zeigt. Innerhalb des Magneten müssen sie dann allerdings vom Süd- zum Nordpol durchge zeichnet werden, um geschlossene Feldlinien zu erhalten. Schneidet man einen Ma gneten in der Mitte durch, erhält man zwei neue Magnete, wobei jeder Magnet für sich erneut einen Nord- und einen Südpol besitzt.
N
S
Abb. 6.11: Feldlinien im Außenbereich eines Stabmagneten.
6.4.2 Amperesches Gesetz Ein Maß für die Stärke eines Magnetfeldes ist die magnetische Flussdichte B,⃗ die im allgemeinen Fall wie das elektrische Feld eine vektorielle Größe ist. Die Einheit der magnetischen Flussdichte ist Tesla (T), benannt nach dem Physiker und Ingenieur Ni kola Tesla. Mithilfe der Relativitätstheorie von Albert Einstein lässt sich zeigen, dass jede elektrische Ladung, die sich im Raum bewegt, ein magnetisches Feld erzeugt. Da ein elektrischer Strom aus sich bewegenden Ladungen besteht, wird jeder strom
204 | 6 Elektrizitätslehre
I
S
N
Abb. 6.12: Das Magnetfeld eines stromdurchflossenen Drahtes mit einer Kompassnadel, die sich in Richtung der Feldlinien aus gerichtet hat.
durchflossene Leiter von einem Magnetfeld umgeben. Dieses Phänomen wurde bereits im Jahr 1820 von Hans Christian Oersted beobachtet, nachdem er festgestellt hat, dass sich eine Kompassnadel in der Nähe eines stromdurchflossenen Drahtes gedreht hat. Platziert man mehrere Kompassnadeln um einen Draht herum, dann stellt man fest, dass sich diese in Form konzentrischer Kreise um den Draht herum ausrichten. Dieser Zusammenhang ist in Abbildung 6.12 illustriert. Aus der Tatsache, dass magnetische Feldlinien immer geschlossen sein müssen und einen stromdurchflossenen Leiter umschließen, formulierte André-Marie Ampère das nach ihm benannte amperesche Gesetz wie folgt: ∮ B⃗ ⋅ ds⃗ = μ 0 I
(6.56)
Die magnetische Feldkonstante μ0 , die als Proportionalitätsfaktor zwischen Magnet feld und Stromstärke eingeführt wurde, hat den Wert: μ0 = 1,25663706212 ⋅ 10−6
N A2
(6.57)
Ähnlich wie beim Gauß’schen Satz der Elektrostatik, bei dem über eine geschlossene Fläche integriert wird, muss hier über eine geschlossene Kurve integriert werden, was erneut durch den Kreis im Integralzeichen deutlich gemacht wird. Im Falle eines gera den Leiters steht gemäß den beschriebenen Beobachtungen das Magnetfeld B⃗ immer senkrecht zum Wegelement ds⃗ um den Leiter herum. In diesem Fall hat das Linienin tegral den Wert 2πrB, das sich aus dem Umfang eines Kreises mit dem Radius r ergibt. Nach der magnetischen Flussdichte B umgestellt ergibt sich somit für einen geraden, stromdurchflossenen Draht: B=
μ0 I 2πr
(6.58)
Das Magnetfeld verhält sich also umgekehrt proportional zum Abstand r zwischen dem Messpunkt und der Achse des Drahtes. Die Dicke des Drahtes spielt hierbei keine Rolle. Die Richtung der Feldlinien lässt sich bei Betrachtung der technischen Strom richtung mit der rechten Faust bestimmen. Wenn der Daumen in Stromrichtung zeigt, dann zeigen die restlichen Finger die Richtung der Feldlinien an. Betrachtet man hin gegen die wahre Fließrichtung der Elektronen, muss entsprechend die linke Hand ver wendet werden.
6.4 Magnetfelder | 205
6.4.3 Magnetisierung Bringt man Materie in ein äußeres Magnetfeld, dann beobachtet man je nach Material eine Abschwächung beziehungsweise Verstärkung des Magnetfeldes. Dies wird übli cherweise mit der Beziehung (6.59) B = μ r B0 ausgedrückt, wobei B0 die Flussdichte des Magnetfeldes im Vakuum ist. Die Mate rialkonstante μ r wird Permeabilitätszahl genannt und hat für das Vakuum analog zur dielektrischen Feldkonstanten ε r exakt den Wert 1. Genau wie auch beim elektrischen Feld werden die Konstanten μ 0 und μ r oft in der Permeabilitätskonstanten μ zusam mengefasst: (6.60) μ = μ0 μ r Oft wird noch die magnetische Feldstärke H als das Produkt der Permeabilitätskon stanten und der magnetischen Flussdichte angegeben: H = μB
(6.61)
Die Feldstärke beinhaltet die Permeabilitätskonstante und somit auch die Materialei genschaften. 6.4.3.1 Diamagnetismus Magnetfelder sind immer mit magnetischen Strömen verknüpft. Die magnetischen Eigenschaften von Materie hängen somit mit den Bahn- und Drehbewegungen der Elektronen in den Atomen beziehungsweise Molekülen zusammen. Die Vorgänge, die im Folgenden anschaulich dargestellt werden sollen, können exakt nur mithilfe der Quantenmechanik erklärt werden. Bringt man Materie, die von sich aus keine magne tischen Dipole besitzt, in ein Magnetfeld, dann werden die Atome beziehungsweise Moleküle durch induzierte Ströme magnetisch polarisiert. Die entstehenden magne tischen Momente sind aufgrund der Lenz’schen Regel so gerichtet, dass das Feld der Ursache entgegenwirken muss und somit das Magnetfeld im Innern kleiner sein muss. In diesem Fall spricht man von Diamagnetismus. Für die Permeabilitätszahl gilt dann μ r < 1. Fast alle Stoffe sind mehr oder weniger diamagnetisch. Bei einigen Materialien überwiegen hingegen die im Folgenden aufgeführten magnetischen Eigenschaften. 6.4.3.2 Paramagnetismus Neben dem Diamagnetismus existiert ebenfalls der Paramagnetismus. Zeigt ein Kör per diese Eigenschaft, dann werden bereits existierende magnetische Dipole, die sonst durch thermische Bewegungen ungerichtet sind, durch ein äußeres Magnetfeld ent lang der Feldlinien ausgerichtet. Durch die Überlagerungen der Dipolfelder mit dem äußeren Felder vergrößert sich effektiv die Feldstärke, womit μ r > 1 gelten muss. Je
206 | 6 Elektrizitätslehre
Wärmer der paramagnetische Stoff ist, desto schlechter kann er magnetisiert werden, da die thermischen Bewegungen mehr und mehr zum Tragen kommen. Nach dem Aus schalten des Feldes geht die Magnetisierung wieder auf den Wert 0 zurück. 6.4.3.3 Ferromagnetismus Wenn Stoffe eine sehr hohe Magnetisierung aufweisen, dann spricht man von Ferro magnetismus. Für die Permeabilitätszahl ergibt sich somit μ r ≫ 1. Sie kann dann je nach Material sehr große Werte annehmen. Die enorme Verstärkung des Feldes rührt daher, dass die Dipole im Gegensatz zum Paramagnetismus ebenfalls untereinander wechselwirken können und sich dann in bestimmten Bereichen, den sogenannten Weiß’schen Bezirken, gegenseitig stabilisieren. Ein ferromagnetischer Stoff behält da mit seine Polarisierung auch nach dem Ausschalten des Feldes bis zu einem gewis sen Grad bei. Aus diesem Grund hängt die Magnetisierung mit der Vorbehandlung des Stoffes zusammen. Diese Eigenschaft kann untersucht werden, indem man einen ferromagnetischen Stoff in das Magnetfeld eines elektrischen Leiters bringt. Bei der Messung ergibt sich folgendes Ergebnis: Zunächst nimmt die Magnetisierung linear mit der magnetischen Flussdichte zu. Anschließend geht sie in eine Sättigung über, weil dann alle magnetischen Dipole vollständig ausgerichtet sind. Verringert man nun die Stärke des Magnetfeldes, nimmt die Magnetisierung wieder ab. Wenn das äußere Magnetfeld den Wert 0 erreicht, weist das ferromagnetische Material allerdings noch immer eine Magnetisierung auf, die als Remanenz bezeichnet wird. Diese verschwin det erst, wenn das äußere Feld nach dem Umpolen einen bestimmten Wert erreicht hat. Einen solchen Kurvenverlauf, wie er in Abbildung 6.13 dargestellt ist, nennt man Hysterese. Die Magnetisierung eines ferromagnetischen Stoffes verschwindet eben falls ab einer gewissen Temperaturschwelle, die Curie-Temperatur genannt wird und ebenfalls vom verwendeten Material abhängt. In der Regel liegt dieser allerdings bei einigen Hundert Grad Celsius und kann im Alltag vernachlässigt werden. Ein ferroma gnetischer Stoff besitzt oberhalb der Curie-Temperatur allerdings immer noch parama gnetische Eigenschaften. Für einige Stoffe sind die jeweiligen Permeabilitätszahlen in Tabelle 6.4 aufgelistet. B
H Abb. 6.13: Beispiel einer Hysteresekurve für die Flussdichte B als Funktion des Magnetfeldes H = μB innerhalb eines ferromagnetischen Stoffes.
6.4 Magnetfelder | 207
Tab. 6.4: Die Permeabilitätszahlen einiger wichtiger Materialien. Material
Permeabilitätszahl
Wasser Kupfer Aluminium Kobalt Eisen
0,999991 0,9999936 1,000022 80 . . . 200 300 . . . 10.000
6.4.4 Lorentzkraft Wenn sich ein stromdurchflossener Leiter in einem Magnetfeld befindet, dann stellt man fest, dass auf den Leiter eine Kraft wirkt. Experimentell findet man eine Propor tionalität zwischen Kraft und der Länge des Leiters sowie der Stromstärke und der magnetischen Flussdichte. Außerdem hat sich herausgestellt, dass die Kraft dann am größten ist, wenn der Strom genau senkrecht zu den Magnetfeldlinien fließt. Fließt er hingegen parallel zu den Feldlinien, dann tritt keine Kraft auf. Für beliebige Richtun gen genügt es daher, lediglich die Projektion des Drahtes zu betrachten, die senkrecht zu den Feldlinien verläuft. Somit folgt für den Betrag der Kraft der Zusammenhang: F = IlB sin α ,
(6.62)
wobei α der eingeschlossene Winkel zwischen der Stromrichtung und den Magnet feldlinien ist. Um diese Formel noch etwas zu verallgemeinern, betrachten wir nun neben der Länge l des Leiters ebenfalls seine Richtung. In diesem Fall entspricht die oben stehende Formel exakt dem Betrag des Kreuzproduktes F⃗ = I l ⃗ × B⃗
(6.63)
zwischen der Richtung des Leiters und den Magnetfeldlinien, wodurch sich neben dem Betrag auch die Richtung der resultierenden Kraft ermitteln lässt. Da ein strom durchflossener Leiter ebenfalls ein Magnetfeld erzeugt, übt dieser demzufolge eine Kraft auf einen anderen elektrischen Leiter aus. Diese Wechselwirkung zwischen zwei Leitern wird seit 1948 verwendet, um die Einheit Ampere zu definieren. Hierbei han delt es sich um die Stromstärke, die eine Kraft von 2 ⋅ 10−7 N zwischen zwei unendlich langen elektrischen Leitern in einem Abstand von 1 m zur Folge hat. Im Folgenden soll nun die Kraft auf eine einzelne Ladung ausgerechnet werden: Ersetzt man die Stromstärke durch ihre Definition I=
dq dt
(6.64)
208 | 6 Elektrizitätslehre und zieht das das Differenzial dt unter den Vektor l,⃗ dann erhält man die mathemati sche Formulierung der Lorentzkraft: F L⃗ = q v⃗ × B⃗
(6.65)
Diese gibt die Kraft an, die auf eine Ladung q wirkt, welche sich mit der Geschwin digkeit v⃗ durch ein Magnetfeld bewegt. Entsprechend ergibt sich für die Kraft auf ein einzelnes Elektron mit der Elementarladung e: F L = e v⃗ × B⃗
(6.66)
Die Lorentzkraft steht somit immer senkrecht auf der Bewegungsrichtung und den Feldlinien. Da der Daumen ebenfalls senkrecht auf dem Zeige- und dem Mittelfinger einer menschlichen Hand steht, kann die linke beziehungsweise rechte Hand verwen det werden, um die Richtung der Lorentzkraft auf eine negative beziehungsweise po sitive Ladung herauszufinden. Dies wird üblicherweise als Drei-Finger-Regel bezeich net. Der Zeigefinger zeigt dabei in die Richtung der Magnetfeldlinien und der Daumen gibt die Bewegungsrichtung der Ladung an. Die Kraft ergibt sich dann aus der Rich tung des Mittelfingers, der so ausgerichtet werden muss, dass er senkrecht auf den beiden anderen Richtungen steht. Wenn sich eine Ladung senkrecht zu den Magnetfeldlinien bewegt, dann ist die Lorentzkraft maximal. Außerdem steht die Kraft in diesem Fall senkrecht auf der Be wegungsrichtung der Ladung. Sie wirkt demzufolge als Radialkraft, was zur Folge hat, dass die Ladung auf eine Kreisbahn gezwungen wird. Dies ist in Abbildung 6.14 am Beispiel eines Elektrons in einem homogenen Magnetfeld dargestellt. Bei der Darstel lung der Magnetfeldrichtung wurde auf die „Indianerpfeilregel“ zurückgegriffen. Die se besagt, dass ein Beobachter lediglich die Pfeilspitze sieht, wenn der Pfeil auf ihn zufliegt. Ein Magnetfeld, das aus der Zeichenebene herauskommt, wird demzufolge mit dem Symbol ⨀ gekennzeichnet. Im umgekehrten Fall sieht man die Federn des Pfeils, weshalb ein solches Magnetfeld mit dem Symbol ⨂ dargestellt wird. Durch das Gleichsetzen von Lorentz- und Zentripetalkraft FL = FZ
(6.67)
e− v
FL
r B Abb. 6.14: Ein Elektron wird durch die senkrecht zur Geschwindig keit wirkende Lorentzkraft auf eine Kreisbahn gelenkt.
6.4 Magnetfelder |
209
erhält man durch Einsetzen der entsprechenden Formeln folgenden Zusammenhang: qvB =
mv2 r
(6.68)
Stellt man diese Gleichung nach r um, so erhält man eine Beziehung zwischen dem Radius der Kreisbahn und der Geschwindigkeit der Ladung: R=
mv qB
(6.69)
Auch bei einer beliebigen Bewegung des geladenen Teilchens erzeugt die Kom ponente, die senkrecht auf den Feldlinien steht, eine Zentripetalkraft. Die parallele Komponente hingegen hat keinen Einfluss auf die Bewegungsrichtung der Teilchen. Die resultierende Teilchenbahn ist demzufolge eine Schraubenlinie, auch Helix ge nannt, mit einem konstanten Radius. In einer Projektion senkrecht zu den Feldlinien ergibt sich dadurch erneut eine Kreisbahn.
Experiment: Fadenstrahlrohr Die Lorentzkraft lässt sich eindrucksvoll mithilfe eines sogenannten Fadenstrahlrohres vorführen. Dieses besteht im Wesentlichen aus einer Glaskugel, die mit einem Gas mit niedriger Dichte be füllt ist. Die Kugel befindet sich außerdem in der Mitte eines Spulenpaares, das ein homogenes Magnetfeld erzeugt. Zunächst werden Elektronen in einem elektrischen Feld beschleunigt und an schließend mit einer konstanten Geschwindigkeit in die Apparatur geschossen. Die Ausrichtung des Strahls ist senkrecht zu den Feldlinien, sodass sich die Elektronen in der Glaskugel auf einer Kreisbahn bewegen. Durch Wechselwirkung der Elektronen mit dem Gas, wird die Spur durch ein schwaches Leuchten sichtbar. Wenn der Raum abgedunkelt wird, dann kann man deutlich einen leuchtenden Ring erkennen.
6.4.5 Massenspektrometer Ein ähnliches Verfahren wird in Massenspektrometern eingesetzt, mit dessen Hilfe beispielsweise kleinste Mengen einer bestimmten Substanz im menschlichen Körper nachgewiesen werden können. Der Aufbau eines solchen Gerätes ist in Abbildung 6.15 skizziert. Zunächst werden die zu untersuchenden Atome oder Moleküle in einer Io nenquelle elektrisch aufgeladen. Anschließend werden die geladenen Teilchen in ei nem elektrischen Feld beschleunigt und durchlaufen zunächst einen Geschwindig keitsfilter, auch Wienfilter genannt. Dieser besteht aus einem Kondensator, der ein elektrisches Feld erzeugt, sowie einem magnetischen Feld, das senkrecht zu diesem steht. Durch die beiden Felder werden die geladenen Teilchen in entgegengesetzte Richtungen abgelenkt. Ein Teilchen kann den Filter daher nur dann passieren, wenn
210 | 6 Elektrizitätslehre
Ionenquelle
Filter +
− Abb. 6.15: Prinzip eines Massenspektrometers mit Ionenquelle und Geschwindigkeitsfilter.
sich beide Kräfte gegenseitig aufheben, d. h., die elektrische Kraft gleich der Lorentz kraft ist: (6.70) Fel = FL Setzt man die entsprechenden Formeln ein und stellt die sich ergebende Gleichung nach v um, so erhält man als Bedingung für die Geschwindigkeit: v=
E B
(6.71)
Nach dem Passieren einer Lochblende werden Ionen in einem starken Magnetfeld auf eine Kreisbahn gezwungen. Da der Radius der Kreisbahn bei gleicher Geschwin digkeit proportional zur Masse ist, kann das Verhältnis Ladung/Masse (q/m) aus dem Auftreffpunkt auf einem zugehörigen Detektor rekonstruiert werden.
6.4.6 Hall-Effekt Die Stärke von Magnetfeldern wird üblicherweise mit kalibrierten Hall-Sonden gemes sen, wobei das Messprinzip auf dem Hall-Effekt aufbaut. Wenn man einen dünnen Leiter oder Halbleiter wie in Abbildung 6.16 in ein Magnetfeld B⃗ bringt und durch An legen einer Spannung einen Stromfluss senkrecht zu den Magnetfeldlinien erzeugt, dann werden die Elektronen aufgrund der Lorentzkraft senkrecht zu den Feldlinien und der Bewegungsrichtung abgelenkt. Die Ablenkung geschieht so lange, bis das elektrisch abstoßende Feld E⃗ zwischen allen Ladungen Q die Lorentzkraft vollstän dig kompensiert hat. In diesem Fall gilt die Bedingung: Fel = FL
(6.72)
Setzt man die entsprechenden Formeln ein, dann erhält man: QE = QvB
(6.73)
6.4 Magnetfelder |
211
l UH
F el e−
d
B v
FL b
I
Abb. 6.16: Der Stromfluss in einem elektri schen Leiter erzeugt beim Eintauchen in ein Magnetfeld eine messbare Hall-Spannung.
U
Wir nehmen nun an, dass der Teil des Leiters, der sich im Magnetfeld befindet, die Länge l hat. Mit v = l/t und I = q/t ergibt sich: QE = IBl
(6.74)
Die Gesamtladung Q lässt sich aus der Elektronendichte n (Elektronen pro Kubikme ter) und dem Volumen V des Leiters wie folgt berechnen: Q = nVe = ndlbe
(6.75)
Die Dicke des Leiters wurde hier mit d und dessen Breite mit b gekennzeichnet. Setzt man diesen Zusammenhang und die Beziehung E = U/b in die Gleichung oben ein, dann erhält man nach U umgestellt eine Formel für die Hall-Spannung: UH =
IB ned
(6.76)
Die Hall-Spannung wächst mit größerer Stromstärke und magnetischer Flussdichte, verhält sich allerdings umgekehrt proportional zur Elektronendichte und zur Dicke des Leiters. Aus diesem Grund sind Halbleiter mit weniger freien Elektronen in der Regel besser geeignet als gut leitende Metalle. Dennoch sind die erreichbaren HallSpannungen meistens so klein, dass sie zusätzlich noch mit Spannungsverstärkern verstärkt werden müssen, um ein ausreichendes Signal zu liefern. In der Regel definiert man noch die materialabhängige Hall-Konstante über: AH =
1 ne
(6.77)
In diesem Fall lässt sich die Hall-Spannung wie folgt berechnen: UH = AH
IB d
(6.78)
212 | 6 Elektrizitätslehre
Das Vorzeichen der Hall-Konstanten hängt davon ab, ob der Strom wie in einem Metall überwiegend von Elektronen hervorgerufen wird oder wie bei Halbleitern von Löchern dominiert werden kann. Die Hall-Konstanten lassen sich in der Regel nur schwer be stimmen und streuen sehr stark. Winzige Unreinheiten und Temperaturschwankun gen haben einen sehr großen Einfluss auf den gemessenen Wert.
6.4.7 Induktion Bewegt man einen Draht der Länge l durch ein homogenes und konstantes Magnetfeld der Stärke B in eine Richtung, die senkrecht auf den Magnetfeldlinien steht, dann lässt sich an beiden Enden des Drahtes eine elektrische Spannung messen. Diese resultiert aus der Lorentzkraft, die auf die Elektronen im Draht wirkt und die Ladungen so lange verschiebt, bis sie durch das entstehende elektrische Feld kompensiert wird. Analog zum Hall-Effekt lässt sich daher schreiben: q E⃗ = −q v⃗ × B⃗
(6.79)
Die Spannung ergibt sich durch Skalarprodukt der Feldstärke mit dem Vektor der Lei terlänge l:⃗ ⃗ (6.80) Uind = E⃗ ⋅ l ⃗ = −l ⃗ ⋅ (v⃗ × B) Erfolgt die Bewegung des Drahtes senkrecht zu den Magnetfeldlinien, dann ergibt sich für den Betrag: Uind = −Blv
(6.81)
Multipliziert man die Leiterlänge l mit der Verschiebung ds, die aus der Definition der Geschwindigkeit v = ds/dt folgt, dann ergibt dies die Fläche dA, sodass sich das Ge setz zur Berechnung der Induktionsspannung allgemeiner als die zeitliche Änderung der überstrichenen Fläche eines Magnetfeldes mit der Zeit formulieren lässt: Uind = −B
dA dt
(6.82)
Oft wird das Produkt von B und A zum magnetischen Fluss Φ zusammengefasst: Φ = BA
(6.83)
Dies ist auch der Grund, warum die Größe B aus historischen Gründen als Flussdichte und nicht als Feldstärke bezeichnet wird. Damit ergibt sich das faradaysche Induk tionsgesetz, das bereits im Jahr 1830 von Michael Faraday experimentell gefunden wurde, zu: Uind = −
dΦ dt
(6.84)
6.4 Magnetfelder | 213
Die Höhe der Induktionsspannung ist folglich proportional zur zeitlichen Änderung des magnetischen Flusses. Wendet man die Produktregel der Differenziation auf diesen Zusammenhang an, dann ergibt sich folgende Beziehung zwischen den relevanten Größen: Uind = − (B
dA dB + A) dt dt
(6.85)
Daraus lässt sich ableiten, dass nicht die Bewegung eines Leiters in einem Magnet feld, sondern ebenfalls die Änderung eines Magnetfeldes selbst eine Induktionsspan nung hervorruft. Zwar bewegt sich der Leiter hierbei nicht selbst. Man kann sich das verändernde Magnetfeld allerdings so vorstellen, dass die Feldlinien durch den Leiter wandern. Versetzt man sich in das System der Feldlinien, bewegen sich die Elektronen allerdings relativ dazu mit derselben Geschwindigkeit, was wiederum eine Kraft auf die Elektronen bewirkt. In diesem Fall verschwindet der Term dA/dt und übrig bleibt: Uind = −
dB A dt
(6.86)
Sowohl bei Gleichung (6.82) als auch bei Gleichung (6.86) handelt es sich folglich um Spezialfälle des allgemeinen Induktionsgesetzes nach Faraday. Man kann den Begriff der Induktion noch etwas weiter fassen, indem man eine geschlossene Leiterschleife in einem Magnetfeld betrachtet. Da das elektrische Feld gleich dem Integral über die Spannung ist und wir entlang der geschlossenen Schleife integrieren müssen, ergibt sich dB⃗ dA⃗ ∮ E⃗ ḋ s⃗ = − ∫ dt
(6.87)
für ein sich zeitlich änderndes Magnetfeld. Das Integral über die Randfläche des Ge bietes, das durch die Fläche A begrenzt ist, muss allerdings gleich dem Flächeninte gral über alle Verwirbelungen in diesem Bereich sein. Dieses Gesetz wird Stokes’scher Satz genannt. Wir können daher mithilfe des Rotationsoperators schreiben: dB⃗ dA⃗ ∫ rot E⃗ ⋅ dA⃗ = − ∫ dt
(6.88)
Da die Flächen auf beiden Seiten identisch sind, kann das Integral weggelassen wer den und die infinitesimalen Flächen dA⃗ verschwinden. Damit erhält man das Induk tionsgesetz in abgewandelter Form rotE⃗ = −
dB⃗ dt
(6.89)
als Beziehung zwischen einem elektrischen und einem magnetischen Feld in vektori eller Form.
214 | 6 Elektrizitätslehre
6.4.8 Lenz’sche Regel Ändert sich die Stromstärke in einem Leiter, dann ändert sich ebenfalls sein Magnet feld. Die Änderung des Magnetfeldes bewirkt wiederum eine Induktionsspannung im Leiter, die einen Strom hervorruft. Baut sich das Magnetfeld auf, dann muss die induzierte Spannung so gerichtet sein, dass der Stromfluss durch eine Gegenspan nung gehemmt wird. Hätte die Spannung eine umgekehrte Polarität, dann würde sich der Stromfluss bis ins Unendliche verstärken. Diese Aussage, die auch Lenz’sche Re gel genannt wird, folgt daher unmittelbar aus dem Energieerhaltungssatz. Sie wird durch Minuszeichen im Induktionsgesetz zum Ausdruck gebracht. Dieser Effekt wird bei Wirbelstrombremsen verwendet, um Motoren ohne Reibung abzubremsen. Der Nachteil gegenüber Bremsvorgängen, die auf der Gleitreibung beruhen, ist, dass die Wirkung der Wirbelstrombremse aber nicht konstant ist, sondern geschwindigkeits abhängig.
Experiment: Fallender Magnet Zunächst stellt man zwei Kupferrohre senkrecht auf. Dann lässt man durch eines der Rohre ein Stück Metall, durch das andere einen Magneten fallen. Der Magnet trifft nun viel später auf dem Boden auf als das Metallstück. Durch das Fallen des Magneten ändert sich die Flussdichte an jedem Ort in Abhängigkeit der Zeit. Die daraus resultierende Induktionsspannung erzeugt Wirbelströme im Rohr, die selbst wiederum ein Magnetfeld erzeugen, das dem Feld des Magneten entgegenge setzt ist.
6.5 Elektrische Schaltkreise 6.5.1 Spannungsquellen In diesem Abschnitt beschäftigen wir uns mit Gleichspannungen. Alle Arten von Span nungsquellen beruhen hierbei auf der Trennung von Ladungen durch das Bereitstel len einer Potenzialdifferenz zwischen einem Minus- und einem Pluspol. Schließt man die Spannungsquelle an einen Verbraucher an, der im einfachsten Fall aus einem ohmschen Widerstand besteht, dann fließt ein elektrischer Strom, der lediglich durch den Gesamtwiderstand begrenzt ist. Typische Spannungsquellen für Gleichspannun gen sind Batterien beziehungsweise Akkus, aber auch Solarzellen oder die im Zuge der Wasserstofftechnologie häufig genannte Brennstoffzelle. Zusätzlich dazu gibt es noch Thermospannungen, die durch Temperaturunterschied zwischen verschiedenen Me tallen erzeugt wird. Misst man die Leerlaufspannung ohne Verbraucher, dann ist die se in der Regel höher als unter Belastung. Der Spannungsabfall beim Anschließen eines Verbrauchers kommt daher, dass Spannungsquellen ebenfalls einen Innenwi derstand R i besitzen, der zu einem Spannungsabfall führt. Dies ist in Abbildung 6.17
6.5 Elektrische Schaltkreise
| 215
V Ra
Ri Batterie
Abb. 6.17: Eine Batterie als Beispiel für eine Spannungs quelle mit einem Widerstand. Das Voltmeter misst die Klemmspannung der Batterie bei Belastung.
am Beispiel einer Batterie skizziert. Die zur Verfügung stehende Spannung ergibt sich gemäß ohmschen Gesetz und Maschenregel zu: U = U0 − IR i
(6.90)
Der Strom ist dann durch die Beziehung I=
U0 Ri + Ra
(6.91)
gegeben, wobei R a der Widerstand des Verbrauchers ist. Einsetzen und Umformen des Bruchs liefern dann für die Klemmspannung unter Belastung: U = U0 (1 −
Ri ) Ri + Ra
(6.92)
Moderne Spannungsquellen haben meistens einen sehr kleinen Innenwiderstand, so dass die Spannung auch bei größeren Stromstärken nicht sehr stark einbricht.
6.5.2 Messverfahren 6.5.2.1 Messgeräte Der Mensch besitzt kein spezielles Sinnesorgan, um elektrischen Strom direkt wahr zunehmen. Man benötigt daher Messgeräte, mit denen man das Vorhandensein eines Stroms messen sowie seine Stärke quantifizieren kann. Prinzipiell eignen sich alle Wirkungen des elektrischen Stroms wie Hitzeentwicklung oder chemische Reaktio nen. Robuste, aber nicht sehr empfindliche Messgeräte sind sogenannte HitzdrahtAmperemeter. Die in Wärme umgewandelte Stromleistung erhitzt einen Draht, des sen Längenänderung über einen speziellen Mechanismus in eine Zeigerdrehung über führt wird. Außerdem gibt es Strommessgeräte, die auf dem Prinzip der Elektrolyse basieren und die pro Sekunde umgesetzte Stoffmenge messen. Gängige Ampereme ter basieren auf den magnetischen Wechselwirkungen des Stroms und dadurch er zeugte Kräfte. Derartige Geräte nennt man üblicherweise Galvanometer. Bei einem
216 | 6 Elektrizitätslehre
Drehspul-Galvanometer befindet sich eine Spule, die von dem zu messenden Strom durchflossen wird, zwischen den Polen eines Permanentmagneten. Das Magnetfeld des Stroms erzeugt dann ein Drehmoment, das die Feder gegen eine rücktreibende Spiralfeder dreht und die Stärke der Auslenkung mittels eines Zeigers darstellt. Au ßerdem existiert noch das Weicheisen-Galvanometer, das aus zwei Weicheisenkör pern besteht, die durch eine umschließende Spule gleichsinnig magnetisiert werden. Die Abstoßung der beiden Körper kann ebenfalls über eine mechanische Kraftübertra gung mit einem Zeiger dargestellt werden. Man verwendet üblicherweise Weicheisen, weil es sich gut magnetisieren und leicht umpolen lässt. Heutzutage sind elektroni sche Messgeräte weitverbreitet. Hierbei wird der Spannungsabfall an einem Wider stand verstärkt und dann mit geeigneten elektronischen Schaltungen auf einem Dis play dargestellt. Generell unterscheidet man bei Messvorgängen von elektrischen Größen zwi schen Spannungs- und Strommessung, wobei beide Messungen auf dem gleichen Prinzip beruhen. Alle Messgeräte haben einen mehr oder weniger großen Innenwi derstand, der sich nachteilig auf die Messung auswirkt. Bei Strommessungen muss der gesamte Strom durch das Messgerät fließen. Das Messgerät muss daher in Reihe mit den anderen Verbrauchern in derselben Masche geschaltet werden und der Innen widerstand sollte möglichst klein sein. Bei Spannungsmessungen muss das Messgerät hingegen parallel zum Bauteil, an dem die Spannung gemessen werden soll, ange bracht werden. Der Innenwiderstand ist hierbei möglichst groß zu wählen, damit nicht zu viel Strom aus der Schaltung durch das Messgerät fließt. Im Allgemeinen muss der Innenwiderstand so gewählt werden, dass die zu messende Größe inner halb der Skala liegt und gleichzeitig die Schaltung selbst nicht zu sehr beeinflusst. Geräte, die sowohl Strom wie auch Spannung messen können, nennt man Multime ter. Sie besitzen in der Regel eine Möglichkeit, mithilfe eines Wahlschalters zwischen verschiedenen Messmethoden und Empfindlichkeitsbereichen zu wechseln. 6.5.2.2 Wheatstone’sche Brückenschaltung Neben der Messung von Strömen und Spannungen kommt es häufig vor, dass Wider standswerte gemessen werden müssen. Ein genaues Verfahren liefert hierbei die soge nannte Wheatstone’sche Brückenschaltung, weche in Abbildung 6.18 skizziert ist. Übli cherweise verwendet man hierfür ein Schleifdraht-Potenziometer, das einen variablen Spannungsteiler darstellt und dessen Widerstandswert sich über einen Schleifkontakt stufenlos einstellen lässt, da der Widerstand proportional zur Länge des Drahtes zu nimmt. In der Schaltung befinden sich dann ein fester Widerstand R1 (Vergleichswi derstand), ein Potenziometer mit den Werten R2 und R3 sowie der unbekannte Wider stand R x . Für die am Widerstand R1 abfallende Spannung U1 ergibt sich U1 = U0
Rx R1 + R2
(6.93)
6.5 Elektrische Schaltkreise | 217
l R3
R2
x A
R1
Rx
Abb. 6.18: Schaltskizze für eine Wheatstone’sche Brücken schaltung mit Schleifkontakt.
und für U2 analog
R2 (6.94) R1 + R2 Der Strom durch das Amperemeter verschwindet genau dann, wenn diese beiden Spannungen identisch sind. Gleichsetzen und Umformen liefern somit als Bedingung dafür: R1 R2 Rx = (6.95) R3 Das Verhältnis der beiden Widerstände R2 und R3 lässt sich über die Schleifdrahtbrü cke mit der Länge L und Position des Schleifdrahtes x einstellen: U2 = U0
R2 L − x = R3 x
(6.96)
Damit ergibt sich für die Berechnung des unbekannten Widerstandes: R x = R1
L−x x
(6.97)
Wenn die Gesamtlänge L bekannt ist, muss lediglich die Teilstrecke x gemessen wer den, sobald das Potenziometer so eingestellt ist, dass das Amperemeter keinen Strom mehr anzeigt.
6.5.3 Kondensator 6.5.3.1 Kapazität Ein Kondensator ist ein Bauteil, das elektrische Ladungen speichert, nachdem eine Spannungsquelle daran angeschlossen wurde. Je mehr Ladungen ein Kondensator pro angelegter Spannung speichern kann, desto größer ist seine Kapazität, die daher über die Beziehung C=
Q U
(6.98)
218 | 6 Elektrizitätslehre
definiert werden kann. Für die Kapazität existiert eine eigenständige Einheit, die Fa rad (F) genannt wird. Im einfachsten Fall besteht ein Kondensator aus zwei Metallplatten, die in einem kleinen Abstand aufgestellt werden und parallel zueinander ausgerichtet sind. Legt man eine elektrische Spannung an diese Kondensatorplatten an, dann wandern die Elektronen vom Minuspol der Spannungsquelle in Richtung der daran angeschlosse nen Platte, wohingegen Elektronen aus der Platte, die an den Pluspol angeschlossen ist, in Richtung der Spannungsquelle abwandern. Die Ladungen bewegen sich dabei so, dass die Energie minimal wird. Dies ist genau dann der Fall, wenn die Feldlinien zwischen den Platten parallel angeordnet sind, sodass ein homogenes elektrisches Feld entsteht. Dies gilt allerdings nur für den Innenbereich des Kondensators. Im Außenbereich ist der Feldlinienverlauf deutlich komplizierter. Um einen parallelen Feldlinienverlauf zu ermöglichen, müssen sich die Ladungen auf der Oberläche der Kondensatorplatten sammeln. Aus Abbildung 6.19 ist zu sehen, dass das elektrische Feld innerhalb eines Kondensators relativ homogen ist, d. h., der Zusammenhang zwischen Spannung und elektrischem Feld vereinfacht sich zu: U = Ed (6.99) Setzt man diesen in die Formel (6.98) für die Berechnung der Kapazität ein, dann er hält man: Q C= (6.100) Ed Aus dem Gauß’schen Satz folgt der Zusammenhang zwischen Q und E zu: Q = EA ε0 ε r
(6.101)
Hierbei wurden die Randeffekte vernachlässigt und für die Fläche lediglich der Be reich zwischen den Platten verwendet. Kürzt man nun das E heraus, so findet man für
Abb. 6.19: Das elektrische Feld eines Plattenkondensators. Die rechte Seite ist positiv und die linke Seite negativ geladen.
6.5 Elektrische Schaltkreise
| 219
die Kapazität eines Plattenkondensators die Formel: C = ε0 ε r
A d
(6.102)
Die Kapazität ist also umso größer, je größer die Flächen der Kondensatorplatten sind und je kleiner der Abstand zwischen ihnen ist. In der Praxis verwendet man häufig Folienkondensatoren, die aus zwei langen, aufgerollten Metallfolien bestehen und in einem Gehäuse eingefasst sind. Zwischen den beiden Folien befindet sich ein Dielek trikum, das die Kapazität der Kondensatoren erhöht und zusätzlich eine schützende Schicht zur Isolierung bildet. 6.5.3.2 Ladevorgang Eine Schaltung zum Auf- und Entladen eines Kondensators ist in Abbildung 6.20 zu sehen. Der Umschalter ist zunächst so eingestellt, dass die Ladungen von der Batte rie über den Widerstand R a in den Kondensator hineinfließen. Aus der Maschenregel lässt sich ableiten, dass die Summe der Spannungen am Widerstand und dem Konden sator zu jedem Zeitpunkt gleich der Batteriespannung U0 sein muss. Man kann den zeitlichen Verlauf daher durch folgende Differenzialgleichung zum Ausdruck bringen: U R (t) + U C (t) = U0
(6.103)
Einsetzen des ohmschen Gesetzes und der Definition der Kapazität ergibt dann: Q(t) (6.104) = U0 C Setzt man für I(t) die Definition des elektrischen Stromes ein, dann ergibt sich: I(t)R i +
Q(t) ̇ Q(t)R (6.105) = U0 a + C Man kann durch Einsetzen leicht zeigen, dass folgende Exponentialfunktion diese Gleichung löst: Q(t) = CU0 − CU0 e at = CU0 (1 − e at ) (6.106) U, I Ra
Re
U (t) aufladen
U0 C
I (t) aufladen U (t), I (t) entladen t
Abb. 6.20: Eine mögliche Schaltung zum Auf- beziehungsweise Entladen eines Kondensators (links) und der zugehörige Verlauf der Stromstärke und am Kondensator gemessenen Spannung (rechts).
220 | 6 Elektrizitätslehre Anstelle der Konstanten a verwendet man auch häufig die Zeitkonstante τ = 1/a. Setzt man dies in die Differenzialgleichung ein, dann ergibt sich für die Zeitkonstante die Beziehung: τ = Ra C
(6.107)
Diese gibt an, wann die Exponentialfunktion auf einen Wert von 1/e (36,8 %) abgefal len ist. Teilt man Gleichung (6.106) durch C, dann erhält man den zeitlichen Verlauf der Spannung am Kondensator: U(t) = U0 (1 − e− Ra C ) t
(6.108)
Die Spannung steigt demzufolge zunächst schnell und dann immer langsamer an, wo bei sie sich dem Maximum U0 annähert, dieses aber erst nach einer unendlich langen Zeit erreichen würde. Um jetzt die Stromstärke in Abhängigkeit der Zeit zu erhalten, muss die Funktion des zeitlichen Verlaufs der Ladung nach t abgeleitet werden: I(t) = I0 e− Ra C t
(6.109)
Hierbei wurde der Vorfaktor U0 /R a durch I0 ersetzt. Das Ergebnis lässt sich wie folgt interpretieren: Durch das sich aufbauende elektrische Feld zwischen den Platten wer den die Ladungen immer stärker an diese gebunden, sodass der elektrische Strom im Laufe der Zeit abnehmen muss, aber sich lediglich asymptotisch an den Wert 0 annä hert. Sowohl der Verlauf der Stromstärke als auch der Verlauf der Spannung sind auf der rechten Seite von Abbildung 6.20) abgebildet. Legt man den Schalter um, dann wird der Kondensator über den Widerstand R e entleert. Auch in diesem Fall kann die mathematische Lösung mithilfe der Maschen regel gefunden werden. Zu jedem Zeitpunkt muss die Summe der beiden Spannungen über C und R e identisch 0 sein. Die Differenzialgleichung ergibt sich dann zu: Q(t) ̇ Q(t)R =0 e + C Die Lösungsfunktion kann in diesem Fall einfach geschrieben werden als: Q(t) = CU0 e− Re C t
(6.110)
(6.111)
Für die Entladefunktion der Spannung erhält man damit erneut U(t) = U0 e− Re C t
(6.112)
und für die Stromstärke in Abhängigkeit der Zeit analog dazu: I(t) = I0 e− Re C t
(6.113)
6.5 Elektrische Schaltkreise
| 221
In diesem Fall sind Spannung und Strom proportional zueinander und folgen einer abklingenden Exponentialfunktion, genauso wie Stromstärke beim Aufladen. Beide Funktionen werden daher durch die gestrichelte Linie in Abbildung 6.20 dargestellt. 6.5.3.3 Energie Sobald Ladungen bewegt werden, muss auch Arbeit verrichtet werden, da die Ladun gen einer Potenzialdifferenz folgen. Die Arbeit, die verrichtet wird, um einen Konden sator aufzuladen, ist anschließend im elektrischen Feld des Kondensators als Ener gie gespeichert. Um die Energie einfacher berechnen zu können, kann man einen physikalischen Trick verwenden: Man stellt sich vor, einzelne Elektronen werden von der negativ geladenen Platte durch den isolierenden Zwischenraum zur positiven ge bracht. Mit jeder Ladung steigt die Kraft, die aufgebracht werden muss, um weitere Ladungen zu verschieben. Dies ergibt sich unmittelbar aus der Vergrößerung der Po tenzialdifferenz. Demzufolge muss gemäß Gleichung (6.20) für jede zusätzliche La dung die infinitesimal kleine Menge dW = U(Q) dQ
(6.114)
an Arbeit verrichtet werden. Die Spannung am Kondensator lässt sich mithilfe von Gleichung (6.98) berechnen. Setzt man diese Gleichung ein und integriert dann über alle Ladungen, ergibt sich für die Energie des elektrischen Feldes: Q0
Q0
0
0
1 1 Q20 Eel = ∫ dW = ∫ Q dQ = C 2 C
(6.115)
Hierbei ist Q0 die gesamte im Kondensator gespeicherte Ladung nach dem Aufladevorgang. Die erneute Anwendung von Gleichung (6.98) liefert schließlich eine Beziehung zwischen der Energie im Kondensator und der angelegten Spannung U0 : Eel =
1 CU 2 2 0
(6.116)
Die gespeicherte Energie wird dann beim Entladen des Kondensators wieder als Arbeit verrichtet. Die Speicherung von elektrischer Energie wird häufig in Defibrillatoren einge setzt. Hierzu wird die Gleichspannung eines Akkus mithilfe eines speziellen Gleich spannungswandlers in eine Hochspannung von einigen Kilovolt umwandelt. Damit wird ein Kondensator mit großer Kapazität aufgeladen, der dann im Bedarfsfall eine deutlich größere Leistung zur Verfügung stellen kann, als es der Akku selbst könnte. Auch bei Blitzlichtern von Fotoapparaten wurde diese Methode eingesetzt. Der Kon densator gab hierbei die in ihm gespeicherte Energiemenge in sehr kurzer Zeit ab, was eine hohe Lichtausbeute zur Folge hatte.
222 | 6 Elektrizitätslehre
6.5.3.4 Verschiebungsstrom James Clerk Maxwell hatte als Erster erkannt, dass nicht nur Ströme, sondern eben falls sich ändernde elektrissche Felder Magnetfelder erzeugen. Ersetzt man im am pereschen Gesetz den Strom durch I = dQ/dt, dann erhält man: dQ ∮ B⃗ ⋅ ds⃗ = μ 0 dt
(6.117)
Den Zusammenhang zwischen Ladung und elektrischem Feld bei einem Kondensa tor können wir aus Gleichung (6.101) verwenden, wobei diese auf unendlich kleine Flächenstücke dA⃗ erweitert wird, was zu folgender Gleichung führt: dE⃗ dA⃗ ∮ B⃗ ⋅ ds⃗ = μ0 ε0 ∫ dt
(6.118)
Auf der linken Seite können wir erneut den Stokes’schen Satz verwenden: ∫ rotB⃗ ⋅ dA⃗ = μ0 ε0 ∫
dE⃗ dA⃗ dt
(6.119)
Erneut fallen die infinitesimal kleinen Flächenstücke dA⃗ weg und übrig bleibt der wie folgt geschriebene Maxwell’sche Verschiebungsstrom: rot B⃗ = μ 0 ε0
dE⃗ dt
(6.120)
Dieser besagt, dass nicht nur ein physikalischer Strom von Ladungen ein Magnetfeld erzeugt, sondern ebenfalls ein sich änderndes elektrisches Feld. Man kann sich dar unter also magnetische Feldlinien vorstellen, die um das sich auf- oder abbauende elektrische Feld eines Kondensators herum entstehen. Dies ist vollkommen analog zur Erzeugung eines elektrischen Feldes (Induktionsspannung) durch die Änderung eines magnetischen Feldes. Beide Felder können sich somit gegenseitig erzeugen, was für die Entstehung von elektromagnetischen Wellen essenziell ist.
6.5.4 Spule 6.5.4.1 Induktivität Wir haben bereits gesehen, dass die Änderung des magnetischen Flusses eine Induk tionsspannung hervorruft. Wenn die Fläche, die der Leiter umspannt, konstant ist, dann hängt die Induktionsspannung lediglich von der zeitlichen Änderung des Ma gnetfeldes ab. Im Falle einer Spule spielt ebenfalls die Anzahl n der Windungen eine Rolle, wobei die Höhe der Induktionsspannung proportional zu n ist: Uind = −n
dB A dt
(6.121)
6.5 Elektrische Schaltkreise |
223
Bei einem stromdurchflossenen Leiter ist die Stärke des Magnetfeldes nach dem am pereschen Gesetz proportional zur Stromstärke. Damit folgt, dass die Induktionsspan nung in dem Leiter proportional zur zeitlichen Änderung des Stromes ist: Uind ∝ −
dI dt
(6.122)
Die Proportionalitätskonstante zwischen diesen beiden Größen wird Induktivität L ge nannt und hat die Einheit Henry (H). Damit lässt sich die Induktionsspannung schrei ben als: Uind = −L
dI dt
(6.123)
In einer langen Zylinderspule herrscht ein annähernd homogenes magnetisches Feld, wie in Abbildung 6.21 gezeigt ist. Die Flussdichte lässt sich mithilfe des ampere schen Gesetzes berechnen. Dazu legt man ein gedachtes Rechteck so durch die Spule, dass eine der beiden langen Seite innerhalb und die andere lange Seite außerhalb der Spule liegen. Die Seite, die außerhalb liegt, ist hinreichend weit weg, sodass das Magnetfeld verschwindet. Auf den beiden kurzen Seiten steht das Magnetfeld annä hernd senkrecht, sodass das Skalarprodukt aus B⃗ und ds⃗ ebenfalls verschwindet. Üb rig bleibt der Teil innerhalb der Spule, der sich analog zum einfachen Draht schreiben lässt als: l
∮ B⃗ ⋅ ds⃗ = ∫ B⃗ ⋅ ds⃗ = Bl ,
(6.124)
0
wobei l die Länge der Spule ist. Eine Spule besteht üblicherweise aus mehreren Win dungen n, wobei die Flussdichte offensichtlich mit steigender Windungszahl zuneh men muss. Aus dem ampereschen Gesetz folgt damit die Gleichung: Bl = μ0 μ r nI
Abb. 6.21: Magnetfeld einer langen Zylinderspule.
(6.125)
224 | 6 Elektrizitätslehre
Teilt man nun durch l ergibt sich für die magnetische Flussdichte einer Spule: B = μ0 μ r n
I l
(6.126)
Setzt man diese Beziehung in Gleichung (6.123) ein, dann erhält man für die Induktionsspannung: A dI (6.127) Uind = −μ 0 μ r n2 l dt Für die Induktivität einer langen Spule gilt dann entsprechend: L = μ 0 μ r n2
A l
(6.128)
Genau wie beim Kondensator wurden hierbei mögliche Randeffekte vernachlässigt. Diese Näherung funktioniert insbesondere bei langen Spulen sehr gut. 6.5.4.2 Selbstinduktion Zum Messen der Strom- und Spannungsverläufe an einer Spule können wir eine Schal tung analog zum Schaltplan auf der linken Seite von Abbildung 6.22 verwenden. Nach dem Anlegen einer Spannungsquelle und Schließen des Schalters wird zunächst ei ne Induktionsspannung erzeugt, die der angelegten Spannung entgegengerichtet ist und den Stromfluss hemmt. Dieser Vorgang wird auch Selbstinduktion genannt. Aus der Maschenregel folgt, dass die Spannung nach dem Einschalten sowohl am Wider stand R e als auch an der Spule L gleich der angelegten Spannung sein muss: U R (t) + U L (t) = U0
(6.129)
Setzt man nun die Formel für die Induktionsspannung und das ohmsche Gesetz ein, so erhält man: (6.130) I(t)R e − L I ̇ = U0 L
U, I I (t) einschalten
Ra U0 Re
U (t) einschalten U (t), I (t) ausschalten t
Abb. 6.22: Mögliche Schaltung zur Veranschaulichung der Selbstinduktion einer Spule (links) und Kurvenverläufe von Strom und Spannung an der Spule beim Ein- und Ausschalten (rechts).
6.5 Elektrische Schaltkreise |
225
Die Lösungsfunktion für die Stromstärke ergibt sich demzufolge genau wie beim Kon densator zu: I(t) = I0 (1 − e−
Re L
t
)
(6.131)
Damit kann man analog zur Aufladung eines Kondensators die Zeitkonstante τ als τ=
L Re
(6.132)
definieren. Im Gegensatz zur Kapazität steht hier die Induktivität im Nenner des Bruchs. Die Spannung an der Spule ist wie bereits erwähnt identisch mit der Induk tionsspannung ̇ (6.133) Uind = −L I(t) und ergibt sich durch Ableiten der Stromstärke nach der Zeit zu: U(t) = U0 e−
Re L
t
(6.134)
Während der Strom nach dem Einschalten ansteigt, fällt die Spannung dementspre chend exponentiell ab. Legt man nun den Schalter um und unterbricht den Stromkreis mit der Span nungsquelle, bricht das Magnetfeld zusammen und induziert erneut eine Spannung. Dadurch wird die Spule selbst zur Spannungsquelle, wobei die Polarität jetzt mit der ursprünglichen Spannung übereinstimmt. Die induzierte Spannung erhält den Strom fluss aufrecht und lässt den Strom über R a zunächst weiterfließen. Die Maschenregel kann erneut angewendet werden und ergibt nun die folgende Bedingung: U R (t) + U L = 0
(6.135)
Einsetzen der beiden bereits genannten Gesetze liefert die Gleichung: ̇ =0 I(t)R a − L I(t)
(6.136)
Diese kann ebenfalls analog zur Kapazität gelöst werden. Für die abklingende Strom stärke als Funktion der Zeit ergibt sich damit I(t) = I0 e−
Ra L
t
(6.137)
und dementsprechend für die Spannung U(t) = U0 e−
Ra L
t
(6.138)
Bei allen Zusammenhängen sieht man eine sehr starke Ähnlichkeit zu den entspre chenden Kurven beim Auf- und Entladen eines Kondensators.
226 | 6 Elektrizitätslehre
6.5.4.3 Energie Nach dem Anklemmen der Spule an eine Spannungsquelle baut sich eine Gegenspan nung auf. Gegen diese muss Arbeit verrichtet werden, um weitere Ladungen zu ver schieben und einen Strom fließen zu lassen. Genau wie beim elektrischen Feld wird zunächst eine infinitesimal kleine Änderung der Energie dW betrachtet, die durch das Verschieben der Ladung dQ erzeugt wird: dW = U(Q) dQ
(6.139)
Einsetzen der Beziehung in Gleichung (6.123) ergibt für das folgende Integral über die Stromstärke: Q0
I0
W = ∫ −L
dI dQ = ∫ −LI dI dt
0
(6.140)
0
Im letzten Schritt wurde die Beziehung I = dQ/dt ausgenutzt. Integration und Einset zen der Grenzen liefern schließlich für die im Magnetfeld gespeicherte Energie: Emag =
1 2 LI 2 0
(6.141)
Die Form dieser Beziehung ist identisch mit der Beziehung zwischen Spannung und Energie bei einem Kondensator, wenn man die Induktivität durch die Kapazität er setzt.
6.5.5 Halbleiterbauelemente 6.5.5.1 Dotierung Halbleiterelemente bestehen, wie der Name schon sagt, aus Halbleitern. Um diese sinnvoll verwenden zu können, wird zusätzlich ein Vorgang namens Dotierung durch geführt. Die sich daraus ergebenden Eigenschaften lassen sich folgendermaßen ver stehen: Je mehr Elektronen sich auf der äußersten Schale eines Halbleiters befinden, desto mehr Elektronen stehen für die Leitfähigkeit zur Verfügung. Diese Elektronen nennt man Valenzelektronen. Silizium (Si) und Germanium (Ge) befinden sich in der vierten Hauptgruppe des Periodensystems und besitzen daher vier Valenzelektronen. Um die Leitfähigkeit von Halbleitern zu erhöhen, kann man diese mit Fremdatomen anreichern (dotieren), die bei der Herstellung in das Halbleitermaterial hinein diffun dieren. Dotiert man Silizium mit einem Element aus der dritten Hauptgruppe, zum Beispiel Indium (In), dann besteht für das Silizium eine hohe Wahrscheinlichkeit, eines seiner Valenzelektronen an das Indium abzugeben. In der Umgebung des an grenzenden Siliziumatoms entsteht somit eine positive Ladung, die als Loch bezeich net wird. Ein solcher Halbleiter wird daher p-Halbleiter genannt. Beim Anlegen ei ner Spannung sind hauptsächlich die Löcher für den Strom verantwortlich, sodass
6.5 Elektrische Schaltkreise |
227
man an dieser Stelle auch von einer sogenannten Löcherleitung spricht. Entsprechend kann man die Dotierung mit einem Element aus der fünften Hauptgruppe vornehmen, wobei Phosphor (P) und Arsen (As) sehr häufig verwendet werden. Durch das Abgeben ihrer Valenzelektronen an das Silizium stehen nun in diesem Halbleiter mehr negative Ladungen zur Verfügung, sodass sich ebenfalls die Leitfähigkeit erhöht. Ein auf diese Weise dotierter Kristall wird daher als n-Halbleiter bezeichnet. 6.5.5.2 Diode Bringt man einen n- und einen p-dotierten Halbleiter zusammen, dann diffundieren aufgrund der Wärmebewegung automatisch einige Elektronen aus dem n-Halbleiter in den p-Halbleiter und rekombinieren mit den dort vorhanden Löchern. In der Folge bildet sich eine dünne Grenzschicht zwischen beiden aus, die pn-Übergang genannt wird. Ein Bauteil mit dieser Charakteristik wird Diode genannt. Deren Funktionsprin zip ist noch einmal auf der linken Seite von Abbildung 6.23 skizziert. Legt man an die Diode eine Spannung so an, dass der Pluspol mit der n-Seite verbunden ist und der Minuspol entsprechend mit der p-Seite, dann vergrößert sich die Sperrschicht und der Stromfluss wird blockiert. Diese Richtung nennt man deshalb Sperrrichtung. Bei einem Umpolen der Spannung verkleinert sich der Übergang hingegen. Sobald ein be stimmtes Potenzial überschritten wird, bewegen sich die Ladungen kontinuierlich von der einen zur anderen Seite, sodass anschließend ein kontinuierlicher Strom fließt. Bei dieser Polung betreibt man die Diode in Durchlassrichtung. Man kann sich eine Diode folglich wie ein Ventil vorstellen, das Wasser oder Luft lediglich in eine Rich tung durchlässt, wie dies beispielsweise bei Fahrradreifen der Fall ist. Auf der rechten Seite von Abbildung 6.23 ist dies noch einmal als Schaltplan dargestellt. Hier wird eine Diode in Durchlassrichtung an eine Lichtquelle angeschlossen. Würde man die Polari tät der Spannung umkehren, so bliebe die Lampe dunkel. Man muss beim Verwenden einer Diode beachten, dass die Beziehung zwischen Strom und Spannung nicht line ar ist, sondern einem Exponentialgesetz gehorcht. Eine Diode ist daher explizit ein Bauelement, das nicht dem ohmschen Gesetz gehorcht. Die Strom-Spannungs-Kenn D1
pn-Übergang
R1
n
p
Abb. 6.23: Der Aufbau einer Diode aus dotiertem Halbleitermaterial (links) und eine einfache Schal tung mit einer Lampe und einer Diode in Durchlassrichtung (rechts).
228 | 6 Elektrizitätslehre 2 0°C 20°C 100°C
Diodenstrom [A]
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
1
Diodenspannung [V] Abb. 6.24: Strom-Spannungs-Kennlinien einer typischen Diode auf Siliziumbasis für verschiedene Temperaturen.
linien einer beliebigen Diode auf Siliziumbasis sind für verschiedene Temperaturen in Abbildung 6.24 dargestellt. Die benötigte Spannung zum Überschreiten dieses Potenzials in Durchlassrich tung wird Vorwärtsspannung genannt. Sie ist in gewisser Weise eine Materialkon stante, hängt aber auch von verschiedenen Parametern wie der Stromstärke oder der Temperatur ab. Bei Silizium wird sie üblicherweise mit 0,7 V angegeben, wohingegen der typische Wert von Germanium bei etwa 0,3 V liegt. Diese Vorwärtsspannung fällt dann an der Diode und steht dem Verbraucher nicht mehr zur Verfügung. Die Ar beit zum Überwinden der Potenzialbarriere von jedem einzelnen Ladungsträger wird dann als diskrete Energie frei. Dies kann entweder zu einer Erhöhung der Temperatur führen oder wie im Falle einer Leuchtdiode (LED) in Form von sichtbarem Licht ge schehen. Die Umkehrung der Leuchtdiode nennt man Solarzelle. Die benötigte Arbeit zum Auflösen des pn-Übergangs wird hierbei von einer äußeren Lichtquelle, näm lich der Sonne bereitgestellt. Je mehr Licht auf die Solarzelle fällt, desto größer ist der Stromfluss, wohingegen die Spannung hauptsächlich von der Potenzialdifferenz des pn-Übergangs abhängt. Durch geschicktes Verschalten einzelner Solarzellen in sogenannten Fotovoltaikanlagen werden meistens Spannungen von 12 V oder 24 V erzeugt, die dann über Wechselrichter hochtransformiert und in das öffentliche Netz eingespeist werden können. 6.5.5.3 Transistor Ein Transistor entspricht, wie auf der linken Seite von Abbildung 6.25 zu sehen ist, im Wesentlichen der Kombination von zwei Dioden, was zur Folge hat, dass zwei pn-Übergänge entstehen. Je nach Kombination der dotierten Halbleiter sind die Über gänge npn oder pnp möglich. Der mittlere Bereich wird Basis (B) genannt, wohinge
6.5 Elektrische Schaltkreise
| 229
gen die beiden angrenzenden Anschlüsse als Emitter (E) und Kollektor (C) bezeichnet werden. Im Falle eines npn-Transistors ist die Basis schwach positiv (p+ ) und der Kol lektor schwach negativ (n+ ) dotiert. Der Emitter besitzt hingegen eine verhältnismäßig große Anzahl an Fremdatomen (n++ ). Zunächst wird zwischen Kollektor und Emitter eine Spannung angelegt. Dabei wird der Pluspol der Spannungsquelle mit dem Kollektor und der Minuspol mit dem Emitter verbunden. Legt man nun eine Spannung zwischen Basis und Emitter an, so dass diese Diode in Durchlassrichtung geschaltet wird, baut sich der pn-Übergang dort ab und die Basis wird mit negativen Ladungsträgern überflutet. Bei einem Tran sistor sind die einzelnen Schichten nun so dimensioniert, dass die große Anzahl an Elektronen nicht über die Basis abtransportiert werden können, sondern durch den zweiten pn-Übergang in den Kollektor eindringen. Diese Verbindung wird dadurch leitend, sodass ein kontinuierlicher Strom fließen kann, solange ein Strom zwischen Basis und Emitter fließt. Unterbricht man diesen Stromkreis, hört der Emitter-Kollek tor-Strom ebenfalls sofort auf zu fließen. Insgesamt gibt es drei Möglichkeiten, einen Transistor anzuschließen: Die Basis schaltung, die Emitterschaltung und die Kollektorschaltung. Im Folgenden soll das Beispiel eines npn-Transistors in einer Emitterschaltung betrachtet werden, da dieser Schaltungstyp, der auf der rechten Seite von Abbildung 6.25 zu sehen ist, besonders häufig anzutreffen ist. Wenn man zwischen B und E eine Spannung U1 in Durchlass richtung anlegt, dann fließt ein Strom durch beide Anschlüsse. Liegt nun eine weitere Spannung U2 zwischen C und E an, so beginnt aufgrund der beschriebenen „Sog wirkung“ ebenfalls zwischen diesen beiden Anschlüssen ein Strom zu fließen. Dieser kann deutlich größer sein als der Basisstrom durch B und E und wird über die Span nung U3 abgegriffen. Da der Kollektorstrom weitgehend proportional zum Basisstrom ist, werden Transistoren als Verstärker verwendet. Auch lassen sich Transistoren bei spielsweise in Lichtschranken als elektronische Schalter verwenden, die die früher verwendeten mechanischen Relais weitgehend ersetzt haben.
R2
Emitter n ++
R1
Basis
Kollektor
p+
n+
U1
C
U2
B E
U3
Abb. 6.25: Skizze zur Beschreibung der Funktionsweise eines Transistors (links) und eine Emitter schaltung eines Transistors zur Verstärkung von Signalen (rechts).
230 | 6 Elektrizitätslehre
6.5.6 Schaltungen 6.5.6.1 Reihenschaltung Eine Reihenschaltung, oder auch Serienschaltung genannt, bezeichnet das Hinterein anderschalten von elektrischen Bauteilen, die dann eine Masche bilden. Die Summe der Teilspannungen muss dann nach der Maschenregel identisch mit der angelegten Spannung sein. Beispiele für Widerstände und Kondensatoren und Spulen sind in Ab bildung 6.26 dargestellt. Schließt man n ohmsche Widerstände in Reihe an eine Span nungsquelle mit der Spannung U an, dann berechnen sich die Teilspannungen zu: U = IR1 + IR2 + ⋅ ⋅ ⋅ + IR n
(6.142)
Teilt man die Gleichung durch die konstante Stromstärke I, dann erhält man für den Gesamtwiderstand: U (6.143) = Rges = R1 + R2 + ⋅ ⋅ ⋅ + R n I In einer Reihenschaltung addieren sich folglich die einzelnen Teilwiderstände R i zum Gesamtwiderstand: n
Rges = ∑ R i
(6.144)
i=1
Anschaulich vergrößert man durch die Reihenschaltung von Widerständen deren Länge. Die Summe über die Einzelwiderstände ergibt sich dann automatisch durch die Proportionalität zwischen Widerstand und Leiterlänge. Schaltet man hingegen Kondensatoren in Reihe, entspricht dies einer Vergröße rung des Plattenabstandes, sodass die Gesamtkapazität kleiner wird. Da der Strom in der Masche konstant ist, muss folglich auch die gesamte geflossene Ladung, also das Integral über den Strom, konstant sein. Für die Teilspannungen an den n Kondensa toren gilt demzufolge: Q Q Q U= + + ⋅⋅⋅ + (6.145) C1 C2 Cn
R1
R2
U
L1 C1
L2
C2
U
U
Abb. 6.26: Beispiele für Reihenschaltungen mit jeweils zwei Widerständen, Kondensatoren und Spulen.
6.5 Elektrische Schaltkreise
| 231
Nach Division durch die Ladung Q erhält man: 1 1 1 1 = + + ⋅⋅⋅ + Cges C1 C2 Cn
(6.146)
Die Gesamtkapazität wird folglich kleiner als die kleinste Einzelkapazität. Schreibt man dies in allgemeiner Form, dann erhält man: n 1 1 =∑ Cges i=1 C i
(6.147)
Wichtig ist, nach der Addition der Kehrwerte erneut den Kehrwert zu bilden, um die Gesamtkapazität zu erhalten. Für die Induktivität einer Reihenschaltung von Spulen erhält man analog mithilfe der Maschenregel: dI dI dI U = L1 + L2 + ⋅ ⋅ ⋅ + Ln (6.148) dt dt dt Die Änderung der Stromstärke ist ebenfalls im gesamten Kreis konstant. Teilt man durch diese, dann erhält man wie auch im Falle der Widerstände eine Summe über die Einzelinduktivitäten: n
Lges = ∑ L i
(6.149)
i=1
6.5.6.2 Parallelschaltung Bei einer Parallelschaltung werden alle Bauteile wie in Abbildung 6.27 dargestellt so miteinander verbunden, dass deren Anschlüsse jeweils auf demselben Potenzial lie gen. Nach der Knotenregel teilt sich die Gesamtstromstärke I in die Teilströme I1 bis I n auf. Die Division durch die angelegte Spannung U ergibt dann: I1 I2 In I = + + ⋅⋅⋅ + U U U U
R1
R2
U
L1 C1 L2 C2 U
Abb. 6.27: Beispiele für Parallelschaltungen.
U
(6.150)
232 | 6 Elektrizitätslehre
Wendet man nun das ohmsche Gesetz an, ist jeder Summand ein Kehrwert des Einzel widerstandes. Damit folgt allgemein für den Gesamtwiderstand einer Parallelschal tung von n Widerständen: n 1 1 =∑ Rges i=1 R i
(6.151)
Diese Formel ist strukturell identisch mit der Reihenschaltung von Kondensatoren. Anschaulich entspricht die Parallelschaltung von Widerstandsdrähten einer Vergrö ßerung der Querschnittsfläche, was den Gesamtwiderstand senkt. Für die Parallelschaltung von Kondensatoren ergibt sich analog dazu für die Ge samtladung: (6.152) Q = Q1 + Q2 + ⋅ ⋅ ⋅ + Q n Man kann diese Gleichung durch die Spannung teilen und dann die Definition der Ka pazität verwenden, um beide Größen zu eliminieren. Damit erhält man für eine Paral lelschaltung von Kondensatoren an einer Spannungsquelle: n
Cges = ∑ C i
(6.153)
i=1
Dies entspricht anschaulich der Vergrößerung der einzelnen Kondensatorplatten und führt zu einer Vergrößerung der Gesamtkapazität. Zum Schluss betrachten wir noch die Parallelschaltung von Spulen. Hierzu leitet man die Gesamtstromstärke nach der Zeit ab: I ̇ = I1̇ + I2̇ + ⋅ ⋅ ⋅ + I ṅ
(6.154)
Anschließend dividiert man die sich ergebende Gleichung wieder durch die Gesamt spannung und verwendet die Definition der Induktivität, was zu folgender Rechenre gel führt: n 1 1 =∑ Lges i=1 L i
(6.155)
Genau wie bei den Widerständen müssen auch die Kehrwerte der Induktivitäten ad diert werden.
6.5.7 Gemischte Schaltung In der Praxis bestehen elektrische Schaltungen meistens aus Kombinationen von Rei hen- und Parallelschaltungen. Diese können auch in sich verschachtelt sein, was eine
6.6 Wechselstrom | 233
R2 R1 R 2,3 R 1,2,3
R3 Abb. 6.28: Beispiel für eine gemischte Schal tung aus Reihen- und Parallelschaltung von drei Widerständen.
direkte Berechnung meistens verkompliziert. Durch eine geschickte Verwendung von Ersatzbauteilen können diese Schaltungen allerdings immer weiter vereinfacht wer den, bis im Idealfall lediglich ein einzelnes Bauteil übrig bleibt, dessen Wert mit der ursprünglichen Schaltung übereinstimmt. Betrachten wir als Beispiel die in Abbildung 6.28 gezeigte Schaltung, in der ein Widerstand R1 mit einer Parallelschaltung von zwei Widerständen R2 und R3 in Reihe geschaltet ist. Um den Gesamtwiderstand der Schaltung zu berechnen, muss zunächst der Wert der Parallelschaltung von R2 und R3 ausgerechnet werden: 1 1 R2 + R3 1 = + = R2,3 R2 R3 R2 R3
(6.156)
Die Parallelschaltung kann somit durch einen Ersatzwiderstand mit dem Wert R2,3 ausgetauscht werden. Im letzten Schritt muss noch die Reihenschaltung aus R2,3 und R1 berechnet werden. Der Wert ergibt sich zu: R1,2,3 = R1 + R1,2 = R1 +
R2 R3 R2 + R3
(6.157)
Die gesamte Schaltung entspricht somit einem Stromkreis, der lediglich aus dem Wi derstand R5 besteht. Jede Schaltung lässt sich prinzipiell auf diese Weise berechnen, wobei die größte Schwierigkeit oft darin besteht, die richtige Reihenfolge zu finden.
6.6 Wechselstrom 6.6.1 Erzeugung Die einfachste Art, Wechselstrom zu erzeugen, ist die Rotation einer Leiterschleife in einem homogenen und zeitlich konstanten Magnetfeld. Dieser Aufbau ist in Abbil dung 6.29 skizziert. Auf den zu den Magnetfeldlinien senkrecht stehenden Teil der Leiterschleife wirkt die Lorentzkraft, die eine Induktionsspannung an den offenen Enden der Leiterschleife erzeugt. Da die Magnetfeldlinien in diesem Beispiel vertikal
234 | 6 Elektrizitätslehre
B
U ind
α α
U ∼
Abb. 6.29: Erzeugung von Wechselstrom mit einer Leiterschleife, die in einem homogenen Magnet feld rotiert.
verlaufen, ist die Induktionsspannung daher immer dann am größten, wenn die Lei terschleife eine waagerechte Position eingenommen hat. Steht sie hingegen senkrecht und damit parallel zu den Feldlinien, verschwindet die Induktionsspannung. Zu allen Zeitpunkten zwischen diesen Extrema hat die Spannung einen definierten, aber sich zeitlich ändernden Verlauf. Der genaue Verlauf kann mathematisch mithilfe des fara dayschen Induktionsgesetzes wie folgt berechnet werden: Die Projektion der Fläche, die senkrecht zu den Feldlinien steht, kann analog zu einer Schwingung durch eine Sinusfunktion mit der Kreisfrequenz ω beschrieben werden, d. h., es gilt: A = A0 sin ωt
(6.158)
Damit wäre die Leiterschleife zum Zeitpunkt t = 0 parallel zu den Feldlinien ausge richtet. Mit dA (6.159) Uind = B dt gilt dann für die Induktionsspannung: Uind = BA0 ω cos ωt
(6.160)
Die größtmögliche Spannung, die jeweils an den Amplituden vorliegt, wird Scheitel spannung genannt. Der zeitliche Verlauf der Induktionsspannung lässt sich dann, wie erwartet, mit der Kosinusfunktion beschreiben. Schließt man einen Verbraucher an die Enden der Leiterschleife an, zum Beispiel einen ohmschen Widerstand, dann fließt ein Strom, dessen zeitlicher Verlauf identisch mit dem der Induktionsspannung ist. Da sich die Polarität im Laufe der Zeit immer wieder umkehrt, gibt es im Gegensatz zur Gleichspannung keine feste Polarität mehr. Diese kehrt sich, je nach Kreisfrequenz, immer wieder um, wodurch sich auch die Fließrichtung der Elektronen periodisch än dert. In der Praxis verwendet man bei der Stromerzeugung in Kraftwerken nicht nur ei ne, sondern drei Spulen, die auf einem Kreis jeweils um 120° gegeneinander versetzt sind. Dies ist schematisch in Abbildung 6.30 durch einen rotierenden Permamentma
6.6 Wechselstrom | 235
ter
lei
al utr
P2
Ne
P1
P3
Abb. 6.30: Erzeugung von Dreiphasenwechselstrom mit einem rotierenden Magneten in der Mitte.
gneten dargestellt, der in den drei Spulen jeweils eine Wechselspannung induziert. Das Magnetfeld wird in Kraftwerken allerdings nicht von einem Permanentmagneten erzeugt, sondern stattdessen von einer stromdurchflossenen Spule (Elektromagnet). Jeweils ein Anschluss der drei Spulen ist miteinander verbunden und bildet den soge nannten Neutralleiter, der häufig auch Nullleiter genannt wird. Der jeweils andere An schluss einer Spule wird Phase genannt. Diese drei Phasen P1 , P2 und P3 werden ge trennt über unterschiedliche Leitungen in die Gebäude transportiert. Der so erzeugte Strom nennt sich deshalb Dreiphasenwechselstrom oder kurz Drehstrom. Der Nullleiter wird zusätzlich noch geerdet (Schutzerdung). Besitzt eine Apparatur einen Anschluss zur Erdung, so entsteht ein zusätzlicher Schutz vor einem Stromschlag, weil der Strom dann von der Phase über die Erde abgeleitet wird. Die Netzfrequenz besitzt in Europa eine Frequenz von 50 Hz und die Spannung 230 V jeder Phase gegenüber dem Nulllei ter. Schaltet man hingegen zwei Phasen gegeneinander, so ist die Spannung aufgrund der Phasenverschiebung von 120° um den Faktor √3 größer.
6.6.2 Effektivwerte Bei einer Gleichspannung ist die abgegebene Leistung einfach durch das Produkt aus Spannung und Stromstärke P = UI (6.161) definiert. Bei einer Wechselspannung hingegen können U und I nicht einfach durch die Scheitelwerte ersetzt werden, da sowohl Spannung als auch Strom um die Nulllinie herum fluktuieren. Stattdessen muss ein Mittelwert für die Leistung gefunden werden, die der Wärmeabgabe einer Gleichspannung entspricht. Mathematisch kann dieser Mittelwert mithilfe des zeitlichen Integrals über die Leistung, also über das Produkt von Strom und Spannung, erreicht werden. Das Ergebnis muss dann noch durch die
236 | 6 Elektrizitätslehre
Periodendauer T geteilt werden: T
T
0
0
1 1 P̄ = ∫ U(t)I(t) dt = ∫ U0 I0 sin2 ωt dt T T
(6.162)
Da Strom und Spannung an einem ohmschen Widerstand immer in Phase sind, ist das Produkt beider Größen auch ohne das explizite Setzen von Betragsstrichen stets posi tiv. Um dieses Integral einfach ausrechnen zu können, wird folgende trigonometrische Umformung durchgeführt: sin2 x =
1 (1 − cos 2x) 2
(6.163)
Integriert man diese Funktion und setzt dann die entsprechenden Grenzen 0 und T ein, so erhält man den einfachen Zusammenhang: U0 I0 1 P̄ = U0 I0 = 2 √2 √2
(6.164)
Im letzten Schritt wurde der Faktor 1/2 auf das Produkt von Strom und Spannung auf geteilt. Es ist sinnvoll, diesen beiden Brüchen jeweils eigene Namen und Formelbuch staben zu geben. So definiert man den ersten Bruch als Effektivspannung Ueff =
U0 √2
(6.165)
I0 √2
(6.166)
und den zweiten Bruch als Effektivstrom Ieff =
p(t) U0 U eff
t i(t) u(t) Abb. 6.31: Stromleistung einer Wechselspannung als Produkt von Spannung und Strom zu jedem Zeitpunkt. Die markierte Fläche entspricht dem Integral über der Leistung innerhalb einer Periode.
6.6 Wechselstrom | 237
Mit den Effektivwerten der Wechselspannung lässt sich folglich die Leistung berech nen, die eine Gleichspannung mit diesen Spannungswerten und Strömen an einem ohmschen Widerstand als Wärme erzeugt. Die zeitlichen Verläufe von Spannung, Strom und Leistung sowie der Scheitelwert und der Effektivwert der Spannung sind in Abbildung 6.31 dargestellt.
6.6.3 Wechselstromwiderstände 6.6.3.1 Kondensator Schließt man einen Kondensator an eine Gleichspannungsquelle an, dann fließt im ersten Moment ein großer Strom, der allerdings recht schnell zum Erliegen kommt. Verwendet man hingegen eine Wechselspannungsquelle, kommt es zu einer periodi schen Auf- und Entladung, die einen kontinuierlichen Stromfluss zur Folge hat. Die angelegte Spannung entspricht dabei zu jedem Zeitpunkt der Spannung am Konden sator: Q(t) U(t) = U C (t) = (6.167) C Beim Anlegen einer sinusförmigen Wechselspannung U(t) = U0 sin ωt
(6.168)
erhält man dadurch folgende Differenzialgleichung: Q(t) (6.169) C Um aus der Ladung den Strom zu berechnen, muss diese Gleichung nach t abgeleitet werden: I(t) U0 ω cos ωt = (6.170) C Die Kosinusfunktion, mit der sich der Stromverlauf beschreiben lässt, steht für eine Phasenverschiebung von 90° zwischen Spannung und Strom: U0 sin ωt =
φ=+
π 2
(6.171)
Man sagt, bei einem Kondensator eilt der Strom der Spannung voraus. Man kann dem Kondensator nun einen Wechselstromwiderstand X C zuweisen. Dazu dividiert man, analog zum ohmschen Gesetz, die Scheitelspannung durch den Scheitelstrom: XC =
U0 U0 = I0 U0 ωC
(6.172)
Nach dem Kürzen von U0 erhält man dann für den Wechselstromwiderstand eines Kondensators: XC =
1 ωC
(6.173)
238 | 6 Elektrizitätslehre
Der Scheitelstrom lässt sich dann mit dem ohmschen Gesetz wie folgt berechnen: I0 =
U0 XC
(6.174)
Der gleiche Zusammenhang gilt entsprechend für die Effektivwerte: Ieff =
Ueff XC
(6.175)
Aufgrund der Phasenverschiebung von 90° zwischen Strom und Spannung ist die ab gegebene Leistung in Form von Wärme zu jedem Zeitpunkt exakt 0. Man bezeichnet diesen Widerstand daher auch als Blindwiderstand. 6.6.3.2 Spule Eine ähnliche Betrachtung kann für eine Spule durchgeführt werden. Für Gleichspan nung ist die Spule vollständig durchlässig. Der Stromfluss würde lediglich durch den ohmschen Widerstand des Drahtes behindert werden und wäre ansonsten unendlich groß. Im Falle einer Wechselspannung induziert der beginnende Stromfluss allerdings aufgrund der Lenz’schen Regel eine Induktionsspannung, die zunächst den Strom fluss hemmt. Legt man wie beim Kondensator eine sinusförmige Wechselspannung an die Spu le an, dann ist die Spannung an der Spule zu jedem Zeitpunkt: ̇ U(t) = U L (t) = −L I(t)
(6.176)
Um den zeitlichen Verlauf der Stromstärke zu bekommen, muss entsprechend nach der Zeit t integriert werden. Dies liefert dann: I(t) =
U0 cos ωt ωL
(6.177)
Das umgekehrte Vorzeichen sowie die Kosinusfunktion ergeben eine Phasenverschie bung von −90° zwischen Strom und Spannung: φ=−
π 2
(6.178)
Der Strom hinkt der Spannung also hinterher. Für den Blindwiderstand ergibt sich dann analog zum Kondensator: XL =
U0 U0 = U 0 I0
(6.179)
ωL
Umformen und Kürzen liefert dann für den Widerstand: X L = ωL
(6.180)
6.6 Wechselstrom |
239
6.6.3.3 Zeigerdiagramme Verwendet man Schaltungen, in denen sowohl Spulen als auch Kondensatoren und ohmsche Widerstände verbaut werden, lassen sich die Widerstände aufgrund der Pha senverschiebungen nicht einfach aufaddieren. Um dieser Problematik gerecht zu wer den, wurden in der Elektrotechnik sogenannte Zeigerdiagramme eingeführt. In diesen Diagrammen werden Spannung und Strom zu bestimmten Zeitpunkten mithilfe von Vektoren dargestellt. Schaltet man einen ohmschen Widerstand, einen Kondensator und eine Spule in Reihe, dann ergibt sich ein Zeigerdiagramm wie auf der linken Seite in Abbildung 6.32 dargestellt. Da Strom und Spannung beim ohmschen Widerstand immer in Phase sind, wird das Produkt aus I und R auf der x-Achse aufgetragen. Die Spannungen an der Spule und am Kondensator werden gemäß ihrer Phasenverschie bung von +90° und −90° entlang beziehungsweise entgegen der y-Achse eingezeich net. Für Spule und Kondensator lassen sich die Spannungen aufgrund der Antipar allelität der Vektoren daher einfach voneinander subtrahieren. Da alle Widerstands arten so definiert sind, dass das ohmsche Gesetz gilt, sind die Widerstände ebenfalls proportional zu den jeweiligen Spannungen. Der Gesamtwiderstand von Spule und Kondensator ist demzufolge einfach die Differenz der beiden Blindwiderstände: X = |X L − X C |
(6.181)
Da der Widerstand immer einen positiven Wert besitzt muss, wurden in der Formel Betragstriche verwendet. Der größere Wert von X L und X C dominiert daher den resul tierenden Blindwiderstand. Aufgrund der Phasenverschiebung zwischen Spule und Widerstand beziehungs weise Kondensator und Widerstand muss zur Berechnung des Gesamtwiderstands deshalb der Satz des Pythagoras angewendet werden, d. h., der resultierende Blind widerstand muss quadratisch auf den ohmschen Widerstand aufaddiert werden: Z = √ X 2 + R2
(6.182)
UC
ng
S
tu eis
U res
inl
he Sc
φ IR
UR
α UC
Blindleistung Q
UL
Wirkleistung P
Abb. 6.32: Ein Beispiel für ein Zeigerdiagramm mit den Spannungen an verschiedenen Widerstands arten (links) sowie eine Illustration der drei Leistungsarten im Wechselstromkreis (rechts).
240 | 6 Elektrizitätslehre
Diese Größe bezeichnet man als Impedanz. Wenn man die Vektoren vektoriell addiert, dann sieht man sofort, dass der resultierende Strom eine geringere Phasenverschie bung als 90° gegenüber der angelegten Spannung hat. Dies hat zur Folge, dass die in Wärme umgesetzte Leistung nicht mehr 0 ist, sodass Energie am Widerstand verloren geht. Da reale Spulen und Kondensatoren im Gegensatz zu idealen Bauteilen immer auch ohmschen Widerstand besitzen, heizen sich diese Bauteile während des Betriebs ebenfalls auf. Aus den Zeigerdiagrammen kann ebenfalls die folgende Formel zur Be rechnung des Phasenwinkels zwischen Strom und Spannung abgelesen werden: tan φ =
X Z
(6.183)
Man benötigt für dessen Berechnung daher den Wert des resultierenden Blindwider standes X sowie der Gesamtimpedanz Z. Bei einer Parallelschaltung kann ähnlich vorgegangen werden wie bei der Paral lelschaltung von ohmschen Widerständen. Zunächst muss der Kehrwert des resultie renden Blindwiderstandes von Spule und Kondensator durch Subtraktion der Kehr werte ermittelt werden: 1 1 1 (6.184) − = X X L X C Für die Parallelschaltung mit einem zusätzlichen ohmschen Widerstand muss erneut eine quadratische Addition der Kehrwerte durchgeführt werden, um daraus die Impe danz zu bestimmen: 1 2 1 √ 1 2 = ( ) +( ) Z X R
(6.185)
Die Phasenverschiebung zwischen Strom und Spannung berechnet sich hierbei eben falls wie in Gleichung (6.183). 6.6.3.4 Scheinleistung Eine Phasenverschiebung von 90° zwischen Strom und Spannung hat zur Folge, dass die resultierende Leistung nicht zum Verrichten von Arbeit zur Verfügung stehen kann. Stattdessen fließt der Strom zum Aufbau des magnetischen Feldes im Falle einer Spule und des elektrischen Feldes bei einem Kondensator. Liegt dagegen keine Pha senverschiebung φ zwischen Strom und Spannung vor, dann ist die Leistungsabgabe maximal. Aus den Zeigerdiagrammen folgt daher unmittelbar, dass diese sogenann te Wirkleistung parallel zur x-Achse, also in Richtung des ohmschen Widerstandes, zeigen muss. Für ihren Betrag folgt daher: P = Ueff Ieff cos φ
(6.186)
6.6 Wechselstrom | 241
Analog dazu definiert man die Blindleistung als die Projektion der Leistung auf die y-Achse, da in diesem Fall eine Phasenverschiebung von 90° zwischen Strom und Spannung vorliegt. Damit gilt: Q = Ueff Ieff sin φ
(6.187)
Die daraus resultierende Scheinleistung, die sich durch die Vektoraddition der beiden Pfeile ergibt, hat somit den Betrag: S = √ P2 + Q2
(6.188)
Sie setzt sich somit aus dem jeweiligen Anteil der Wirk- und der Scheinleistung zusam men. Dieser Zusammenhang ist noch einmal auf der rechten Seite von Abbildung 6.32 zusammengefasst. Eine passende Analogie dazu ist ein mit Limonade gefülltes Glas. Bestellt man ein solches in einem Restaurant, dann möchte man möglichst viel Limonade und wenig Schaum. Die Limonade selbst entspricht der Wirkleistung. Während des Füllvorgangs bildet sich bei kohlensäurehaltigen Getränken eine Schaumkrone auf der Oberseite, die das Glas voller erscheinen lässt. Diese ist daher vergleichbar mit der Blindleis tung. Die Scheinleistung entspricht dann der scheinbaren Füllhöhe des Glases, also in diesem Fall der Summe aus der Wirk- und Blindleistung. Da an dieser Stelle kei ne quadratische Addition der Höhen verwendet wird, darf dieser Vergleich hingegen nicht zu wörtlich genommen werden.
6.6.4 Transformator Wenn man Wechselspannungen verkleinern möchte, dann lassen sich natürlich im mer Spannungsteiler verwenden. Der Nachteil ist hierbei allerdings die große Verlust leistung an den Widerständen. Auch Wechselstromwiderstände von Spulen und Kon densatoren sind dazu nur bedingt geeignet, zumal eine Erhöhung der Spannung mit keiner dieser Schaltungen möglich ist. Eine nahezu verlustfreie Umwandlung von Spannungen und Strömen kann mit dem sogenannten Transformatorprinzip erreicht werden. Dazu werden zwei Spulen wie in Abbildung 6.33 mit einem Eisenkern verbunden, um eine möglichst gute ma gnetische Kopplung zu gewährleisten. Legt man eine Wechselspannung U1 an eine der Spulen mit der Windungszahl n1 an, dann wird aufgrund der induzierten Span nung und des daraus folgenden Wechselstromwiderstandes der Strom auf einen be stimmten Wert begrenzt. Diese Spule wird auch Primärspule genannt. Jede Windung der Spule erzeugt dabei den magnetischen Fluss Φ. Die Induktionsspannung in der
242 | 6 Elektrizitätslehre
I1 I2
U1 U2
Abb. 6.33: Ein Transformator bestehend aus zwei Spulen, die über einen Eisenkern miteinander verbunden sind.
Spule ergibt sich daher in diesem Fall zu: Uind = −n1
dΦ = U1 dt
(6.189)
Diese induzierte Spannung muss aufgrund der Maschenregel gleich der angelegten Spannung, dieser aber entgegengerichtet sein. An der Sekundärspule mit der Win dungszahl n2 entsteht dann aufgrund des sich ändernden magnetischen Flusses der Primärspule ebenfalls eine Induktionsspannung: U2 = −n2
dΦ dt
(6.190)
Setzt man hier Gleichung (6.189) ein, so ergibt sich für das Spannungsverhältnis eines idealen, unbelasteten Transformators: U2 n2 = U1 n1
(6.191)
Aufgrund der Energieerhaltung müssen die Leistungen auf der Primär- und Sekundär seite zu jedem Zeitpunkt gleich groß sein. Da sich die Leistung aus dem Produkt von Spannung und Stromstärke ergibt, muss das Verhältnis der Stromstärken umgekehrt zum Verhältnis der Windungszahlen sein: I 2 n1 = I 1 n2
(6.192)
Beide Beziehungen gelten lediglich unter idealen Bedingungen und ohne weitere Ver luste in den Spulen oder dem Eisenkern. Transformatoren bilden die Grundlage fast
6.7 Schwingkreise
| 243
aller Netzteile. In modernen Laptop- und Handyladegeräten werden üblicherweise Schaltnetzteile verwendet, die die Frequenz der Netzspannung auf einige Kilohertz erhöhen, sodass die Transformatoren sehr klein gebaut werden können, ohne dabei große Verluste zu erzeugen.
6.7 Schwingkreise Die einfachste Form eines elektrischen elektromagnetischen Schwingkreises besteht aus einer Spule und einem Kondensator. Wenn der Kondensator bereits geladen ist, dann liegt eine Spannung an dessen Anschlüssen an. Verbindet man die Spule mit dem Kondensator, dann ruft die Kondensatorspannung einen Stromfluss hervor, der von der Selbstinduktion der Spule gebremst wird. Zu Beginn ist der Stromfluss da her 0 und das Magnetfeld der Spule baut sich auf. Die Stromstärke erreicht dann ihr Maximum, wenn das Magnetfeld vollständig aufgebaut und der Kondensator leer ist. Danach bricht das Magnetfeld wieder zusammen und induziert eine Spannung in der Spule, die den Strom zunächst weiterfließen lässt und den Kondensator in umgekehr ter Richtung auflädt. Wenn sich das Magnetfeld vollständig abgebaut hat und der Strom zum Erliegen gekommen ist, dann ist der Kondensator ebenfalls wieder voll ständig geladen und entlädt sich wieder über die Spule. Dieser Vorgang wiederholt sich periodisch unendlich oft. In der Realität wandeln die ohmschen Widerstände der Leitungen jedes Mal einen Teil der Energie in Wärme um, sodass die Amplitude von Strom und Spannung immer weiter abnimmt, bis die gesamte Schwingung zum Er liegen kommt. Dieses Verhalten entspricht der Schwingung eines Pendels, wobei die Spannung der Gewichtskraft und das Magnetfeld der Trägheit entspricht. Um die Eigenfrequenz der Schwingung zu berechnen, verwenden wir den Ener giesatz, der in diesem Fall besagt, dass die Energie im Magnetfeld der Spule und im elektrischen Feld des Kondensators zu jedem Zeitpunkt erhalten sein muss: 1 2 1 2 LI (t) + Q (t) = Eges 2 2C
(6.193)
Ersetzt man I durch Q̇ und leitet die sich ergebende Gleichung nach der Zeit, dann erhält man unter Anwendung der Kettenregel (oder wahlweise der Produktregel): ̇ Q(t) ̈ + 1 Q(t)Q(t) ̇ =0 L Q(t) C
(6.194)
Nun lässt sich die Stromstärke ausklammern: ̈ + I(t) (L Q(t)
1 Q(t)) = 0 C
(6.195)
Diese Gleichung ist dann erfüllt, wenn entweder I(t) = 0 ist oder der Term in der Klammer den Wert 0 annimmt. Diese Gleichung erinnert an die bereits betrachtete
244 | 6 Elektrizitätslehre
Schwingungsgleichung für ein Federpendel. Als Lösung ergibt sich deshalb analog zu diesem: (6.196) Q(t) = Q0 sin ωt , wobei Q0 die Amplitude der Schwingungsfunktion ist. Einsetzen der Funktion in die Differenzialgleichung und Umformen nach ω liefern: ω=
1 √LC
(6.197)
Daraus ergibt sich unmittelbar die nach William Thomson benannte Thomson’sche Schwingungsgleichung: f =
1 2π√LC
(6.198)
Sowohl Spannung als auch Strom schwingen mit dieser Eigenfrequenz, solange die ohmschen Verluste vernachlässigbar klein sind. Das Spannungssignal eines Schwing kreises kann, wie in Abbildung 6.34 zu sehen ist, mithilfe eines Oszilloskops sichtbar gemacht werden, wobei die Spannung prinzipiell über der Spule oder dem Kondensa tor abgegriffen werden kann.
Abb. 6.34: Ein Oszilloskop zeigt die oszillierende Spannung eines Schwingkreises aus Spule und Kondensator im Resonanzfall. Die Werte der x-Achse geben die Zeit an, während sich der zugehörige Spannungswert an der y-Achse ablesen.
6.8 Elektromagnetische Wellen |
245
6.8 Elektromagnetische Wellen 6.8.1 Ausbreitungsgeschwindigkeit Im Folgenden soll gezeigt werden, dass sich elektromagnetische Wellen mit Lichtge schwindigkeit ausbreiten, und der Wert dieser Geschwindigkeit berechnet werden. Da zu betrachten wir ein Gleichungssystem aus den Gleichungen (6.89) und (6.120). Im nächsten Schritt wollen wir eines der beiden Felder eliminieren, um eine einzige Glei chung zu erhalten. Dazu wenden wir den Rotationsoperator erneut auf die Rotation des elektrischen Feldes es an: ∂ B⃗ rot rotE⃗ = −rot ∂t
(6.199)
Setzt man nun die zweite Gleichung ein, so erhält man: ∂2 E⃗ rot rotE⃗ = −ε0 μ 0 2 ∂t
(6.200)
Für die zweimalige Anwendung des Rotationsoperators kann folgende Äquivalenzum formung durchgeführt werden: rot rot E⃗ = grad div E⃗ = div grad E⃗
(6.201)
Dies kann man durch Einsetzen des Nabla-Operators in das Kreuzprodukt leicht nachprüfen. Die Divergenz des elektrischen Feldes verschwindet in diesem Fall, weil es durch ein sich änderndes Magnetfeld erzeugt wird und nicht durch Ladungen als Quelle. Daher fällt der erste Term weg und übrig bleibt die Divergenz des Gradienten von E.⃗ In diesem Fall wird der Gradient nicht auf eine skalare Funktion angewendet, sondern auf ein Vektorfeld, was nach der Bildung der Divergenz insgesamt zu drei Gleichungen führt: 1 ∂2 E i ∂2 E i ∂2 E i ∂2 E i + + = (6.202) 2 2 2 dx ∂y ∂z √ε0 μ 0 ∂t2 An dieser Stelle muss i durch jeweils eine der Komponenten x, y oder z ersetzt werden. Vergleicht man dieses Ergebnis mit der allgemeinen Form der Wellengleichung, die wir für den eindimensionalen Fall bereits früher hergeleitet haben, so erhält man für die Ausbreitungsgeschwindigkeit: c=
1 √ ε0 μ 0
(6.203)
Einsetzen der Konstanten liefert exakt den Zahlenwert 3 ⋅ 108 m/s der Lichtgeschwin digkeit.
246 | 6 Elektrizitätslehre
Experiment: Messung der Lichtgeschwindigkeit Die Lichtgeschwindigkeit kann beispielsweise mit der foucaultschen Drehspiegelmethode gemes sen werden. Hierbei fällt ein Laserstrahl zunächst auf einen Strahlteiler, der einen Teil des Lichts auf einem Sensor abbildet. Der andere Teil des Lichts trifft auf einen Drehspiegel und wird dort auf einen mehrere Meter entfernten Spiegel projiziert. Der reflektierte Strahl trifft danach wieder auf den Drehspiegel, der sich in der verstrichenen Zeit allerdings um einen kleinen Winkel weiterge dreht hat. Nach dem Auftreffen auf dem Strahlteiler und der Projektion auf den Sensor lässt sich eine leichte Verschiebung zwischen den beiden Laserpunkten messen. Die Lichtgeschwindigkeit kann nun aus den gemessenen Abständen des Aufbaus bestimmt werden. Die gesamte Messung wird umso genauer, je schneller der Spiegel rotiert und je länger die Laufzeit des Lichts zwischen beiden Spiegeln ist.
6.8.2 Erzeugung & Empfang Zunächst zieht man die Spule eines Schwingkreises so weit auseinander, dass sich ein gerader Draht ergibt. Dadurch verringert sich zwar die Induktivität. Diese wird aber niemals vollständig verschwinden. Im nächsten Schritt werden die Platten des Kondensators auseinandergezogen, wodurch sich dessen Kapazität verringert, aber ebenfalls immer einen Wert größer als 0 besitzt. Zum Schluss entfernt man beide Plat ten und übrig bleibt ein einfacher Draht mit einer bestimmten Länge, der sowohl eine Induktivität als auch eine Kapazität besitzt und somit selbst einen Schwingkreis mit einer bestimmten Eigenfrequenz darstellt. Bringt man nun diesen Draht in das Ma gnetfeld eines anderen Schwingkreises mit exakt derselben Frequenz, dann überträgt sich dessen Schwingung auf den Stab und die Elektronen wandern von einem Ende des Drahtes zum anderen. Das sich ändernde Magnetfeld der Induktivität erzeugt dann ein elektrisches Feld, wohingegen das sich ändernde elektrische Feld der Kapazität die Erzeugung eines Ma gnetfeldes zur Folge hat. Beide Felder erzeugen sich somit gegenseitig und können sich wie eine Welle im Raum fortbewegen. Der Stab wirkt nun wie eine Antenne, die elektromagnetische Wellen in den Raum aussendet, und wird auch Hertz’scher Dipol genannt. Der Name leitet sich von Heinrich Hertz ab, dem Entdecker der elektroma gnetischen Wellen. Während das elektrische und das magnetische Feld in der Nähe der Antenne noch um 90° phasenverschoben sind, verschwindet diese Phasendiffe renz im Fernfeld. Die beiden Feldvektoren stehen dann zu jedem Zeitpunkt senkrecht aufeinander und ebenfalls senkrecht auf dem Vektor der Ausbreitungsrichtung. Der räumliche Verlauf einer sich in z-Richtung ausbreitenden Welle ist exemplarisch in Abbildung 6.35 dargestellt. Die bestmögliche Abstrahlung erreicht man, wenn der Draht so bemessen ist, dass die Elektronen während einer Halbschwingung die gesamte Länge einmal zurückle gen können, d. h., die benötigte Zeit entspricht der halben Periodendauer der elektro magnetischen Schwingung. In dieser Zeit hat sich die Welle um die halbe Wellenlänge fortbewegt. Damit ergibt sich unmittelbar, dass die Länge des Dipols ein Vielfaches der
6.8 Elektromagnetische Wellen
| 247
E B
z Abb. 6.35: Das elektrische sowie das magneti sche Feld einer sich in z-Richtung ausbreiten den elektromagnetischen Welle.
halben Wellenlänge der elektromagnetischen Welle ist: l=n
λ 2
(6.204)
Neben der beschriebenen einfachen Stabantenne gibt es noch viele weitere Baufor men, die alle gewisse Vor- und Nachteile haben. Antennen sind außerdem vollkom men reziprok, d. h., sie können sowohl zum Senden als auch zum Empfangen von elektromagnetischer Strahlung derselben Frequenz verwendet werden.
6.8.3 Leistung & Energie Um die Energie und Leistung einer elektromagnetischen Welle zu bestimmen, berech nen wir zunächst die Energiedichte des elektrischen und magnetischen Feldes im Va kuum: Für die Energiedichte des elektrischen Feldes wird in Gleichung (6.116) die Ka pazität eines Plattenkondensators aus Gleichung (6.102) sowie die Beziehung aus Glei chung (6.99) eingesetzt. Damit ergibt sich: Wel =
1 A 2 ε0 Ed 2 d
(6.205)
Die Energiedichte des elektrischen Feldes ergibt sich, wenn man die Gleichung durch das Volumen V = Ad teilt: 1 (6.206) mel = ε0 E2 2 Für die magnetische Energiedichte kann analog dazu vorgegangen werden: Aus gehend von Gleichung (6.141) erhält man, wenn man die Stromstärke durch Glei chung (6.126) und die Induktivität durch Gleichung (6.128) ersetzt, für die Energie im Magnetfeld: Al 2 B (6.207) Wmag = 2μ 0 Die Energiedichte (Energie pro Volumenelement) ergibt sich dann durch die Division durch V = Al zu: Emag 1 2 wmag = B (6.208) = V 2μ 0
248 | 6 Elektrizitätslehre
Beide Energiedichten hängen somit jeweils nur von der Stärke ihres Feldes ab. Die gesamte Energiedichte einer elektromagnetischen Welle ist gegeben durch die Summe aus beiden Energiedichten: wem = wel + wmag =
1 1 2 B ε0 E2 + 2 2μ 0
(6.209)
Nutzt man jetzt noch die Beziehung zwischen den Feldkonstanten und der Lichtge schwindigkeit aus, so erhält man: wem =
1 ε0 (E2 + c2 B2 ) 2
(6.210)
Die Wellenfunktionen für das E- und B-Feld lauten in einer Dimension: E(x, t) = E0 sin(ωt − kx)
(6.211)
B(x, t) = B0 sin(ωt − kx)
(6.212)
Aus Gleichung (6.89) folgt, dass die räumliche Ableitung von E bedingt durch Rota tionsoperator und die zeitliche Ableitung von B identisch sein müssen. Setzt man die Funktionen dort ein, erhält man nach dem Gleichsetzen den folgenden Zusammen hang: ω 1 E= B= B, (6.213) k c wobei im letzten Schritt die Beziehung fλ = c ausgenutzt wurde. Damit vereinfacht sich die elektromagnetische Energiedichte zu: wem = ε0 E2
(6.214)
Um die Leistung E zu bestimmen, muss diese Energiedichte mit dem Volumen V = As multipliziert werden. Die Intensität I = P/A ergibt sich dann zu: s (6.215) I = ε0 E2 = ε0 cE2 t Die Intensität steigt daher mit dem Quadrat der elektrischen Feldstärke. Zum Schluss soll noch der Poynting-Vektor definiert werden. Dieser wird üblicherweise geschrieben als: 1 ⃗ S⃗ = (E × B)⃗ μ0
(6.216)
Mit den bereits bekannten Beziehungen lässt dieser sich einfach wie folgt umschrei ben: (6.217) S⃗ = ε0 c2 (E⃗ × B)⃗ ⃗ ⃗ Da E und B immer senkrecht aufeinander stehen, zeigt der Poynting-Vektor immer in Ausbreitungsrichtung der Welle. Außerdem ergibt für sich für dessen Betrag: ⃗ B|⃗ = ε0 cE2 = I , |S|⃗ = ε0 c2 |E|| was genau der Intensität der elektromagnetischen Welle entspricht.
(6.218)
6.8 Elektromagnetische Wellen |
249
6.8.4 Spektrum
10 −17
10 −13
10 −9
10 −5
Langwellen
Radiowellen
Mikrowellen
Infrarot
UV
Röntgenstrahlung
Gammastrahlung
Das Spektrum, also der Frequenz- und Wellenlängenbereich elektromagnetischer Wellen, ist prinzipiell unendlich groß. Dennoch hat es sich im Laufe der Zeit einge bürgert, spezielle Bereiche besonders zu kennzeichnen, welche in Abbildung 6.36 grafisch dargestellt sind. Hierzu gehören besonders Bereiche, die uns in unserem alltäglichen Leben betreffen. Bis in den Gigahertzbereich werden elektromagnetische Wellen in der Regel mit der zugehörigen Frequenz angegeben. Radiosender im Mittelund Ultrakurzwellenbereich arbeiten etwa zwischen 0,5 und 120 MHz. Fernsehsen der benutzen dagegen höhere Frequenzen zwischen etwa 170 und 900 MHz. Daran anschließend folgt der Mobilfunk mit Frequenzen zwischen 900 und 1800 MHz. Elek tromagnetische Wellen in einem Mikrowellenherd haben noch höhere Frequenzen und arbeiten häufig bei 2,6 GHz, was einer Wellenlänge von etwa 11 cm entspricht und somit eigentlich Dezimeterwellen genannt werden müsste. Wellen im Mikrometerbe reich werden bereits als Infrarot- oder Wärmestrahlung bezeichnet. Licht ist ebenfalls eine elektromagnetische Welle mit Wellenlängen zwischen etwa 380 nm (blaues Licht) und 740 nm (rotes Licht). Die genauen Angaben schwanken etwas in der Literatur. Ul traviolettes (UV) Licht schließt daran an, wobei Wellenlängen unterhalb von etwa 250 nm als ionisierende Strahlung bezeichnet werden, da deren Energie groß genug ist, beim Auftreffen auf Atome Elektronen aus deren Hülle zu schlagen. Elektroma gnetische Wellen mit größeren Wellenlängen können dies hingegen nicht. Ab einer Wellenlänge von 10 nm und kleiner spricht man von Röntgen- oder Gammastrahlung. Der Begriff der Röntgenstrahlen wird dann verwendet, wenn die Strahlung künst lich durch das Abbremsen von geladenen Teilchen erzeugt wird. Gammastrahlung hingegen bezeichnet elektromagnetische Wellen, die von Atomkernen nach einem radioaktiven Zerfall ausgesendet werden. Im Gegensatz zur Röntgenstrahlung ist sie in der Regel auch viel kurzwelliger.
10 3
10 −1
10 7
Wellenlänge [m]
400
450
500
550
600
650
700
Wellenlänge [nm] Abb. 6.36: Das für uns Menschen wichtige Spektrum elektromagnetischer Wellen mit einem Aus schnitt des sichtbaren Bereichs zwischen etwa 380 und 740 nm.
250 | 6 Elektrizitätslehre
6.9 Zusammenfassung Nach einer kurzen geschichtlichen Einführung in die Entdeckung der Elektrizität wer den zunächst die physikalischen Effekte ruhender Teilchen in der Elektrostatik be trachtet. Hierbei werden die Ladung, elektrisches Feld und Spannung definiert und das Coulomb’sche Gesetz hergeleitet. Anschließend erfolgt ein Übergang zu beweg ten Ladungen, was allgemein als elektrischer Strom bezeichnet wird. Nach einigen Definitionen zur Stärke und Richtung des Stroms wird das ohmsche Gesetz genauer betrachtet sowie die Abhängigkeit des elektrischen Widerstandes von verschiedenen Parametern wie Material und Temperatur. Auch werden die Kirchhoff’schen Geset ze, denen der elektrische Strom in einem Stromkreis gehorcht, sehr genau betrach tet. Im Anschluss daran werden Magnetfelder untersucht, die ein direktes Resultat von sich bewegenden Ladungen sind, und deren Auswirkungen auf andere geladene Teilchen in Form der Lorentzkraft untersucht. Dieser Abschnitt beinhaltet ebenfalls einige technische und medizinische Beispiele für die Anwendung von elektrischen und magnetischen Feldern. Die beschriebenen physikalischen Effekte werden dann am Beispiel einiger Bauteile wie Kondensatoren und Spulen genauer erläutert. Auch moderne Halbleiterbauelemente wie Dioden und Transistoren werden ausführlich be handelt. Nach der Beschreibung von Gleichstromkreisen wird auf die Erzeugung und Verwendung von Wechselstrom eingegangen, wobei der Fokus hier auf dem Wechsel stromwiderstand von Spule und Kondensator liegt. Mithilfe einer Abstraktion dieser Gesetzmäßigkeiten wird hergeleitet, wie man elektromagnetische Wellen auf einfache Art erzeugen und empfangen kann, sowie die Natur dieser Wellen besprochen. Auch die Energiedichte und das gesamte Spektrum elektromagnetischer Wellen werden in diesem Abschnitt behandelt.
Aufgaben Aufg. 6.1: Ein Elektron bewege sich mit nahezu Lichtgeschwindigkeit in einem elek trischen Feld der Stärke 0,1 N/C senkrecht zu den elektrischen Feldlinien. Wie groß ist die vertikale Ablenkung, nachdem es sich eine Strecke von 10 cm in horizontaler Richtung bewegt hat? Aufg. 6.2: In einem Wasserstoffatom beträgt der Abstand zwischen Elektron und Pro ton 53 pm. Um etwa wie viele Größenordnungen ist die elektrische Anziehung stärker als die gravitative Anziehung zwischen beiden Ladungen? Aufg. 6.3: Ein Elektron wird in einem elektrischen Feld mit der Spannung 100 V be schleunigt. Welche Geschwindigkeit hat es nach dem Durchlaufen des Feldes erreicht? Aufg. 6.4: Durch einen Kupferdraht fließt eine Stromstärke von 10 Milliampere. Wie viele Elektronen bewegen sich pro Sekunde durch seine Querschnittsfläche?
Aufgaben |
251
Aufg. 6.5: Ein 4,7 kΩ-Widerstand wird an eine Spannungsquelle mit einer Spannung von 1,5 V angeschlossen. Welcher Strom fließt dann im gesamten Stromkreis? Aufg. 6.6: Ein Widerstandsdraht der Länge 10 cm mit einem runden Querschnitt be steht aus Konstantan und hat einen Durchmesser von 1 mm. Welcher Widerstand er gibt sich daraus? Aufg. 6.7: Ein Kupferdraht erwärmt sich durch einen Stromfluss und erreicht schließ lich eine Temperatur von 40 °C. Um wie viel Prozent vergrößert sich der spezifische Widerstand dabei? Aufg. 6.8: Wie groß ist der Leitwert eines Widerstandes mit 22 kΩ Aufg. 6.9: An einem Widerstand wird ein Spannungsabfall von 5 V gemessen. Die Stromstärke im gesamten Kreis beträgt 200 mA. Wie groß ist die in Wärme umgesetzt Leistung? Aufg. 6.10: Ein Toaster, der in Mitteleuropa mit einer Spannung von 230 V betrieben wird, habe eine Heizleistung von 800 W. Wie groß ist dann der Widerstand der Heiz drähte etwa? Aufg. 6.11: Eine 40-Watt-Glühbirne leuchtet jede Nacht 8 Stunden lang im Dauerbe trieb. Wie viel Geld muss der Hausbesitzer dafür auf der nächsten Stromrechnung un gefähr bezahlen, wenn eine Kilowattstunde 30 Eurocent kostet? Aufg. 6.12: Ein Knoten in einem Schaltkreis bestehe aus drei stromführenden Leitun gen. Durch eine dieser Leitungen fließt Strom von 2 A und durch die andere 5 A in den Knoten hinein. Wie groß ist die Stromstärke in der dritten Leitung? Aufg. 6.13: Zwei Widerstände sind in einer Masche an eine Spannungsquelle mit einer Spannung von 12 Volt angeschlossen. An einem der Widerstände wird eine Spannung von −5 Volt gemessen. Wie groß muss folglich der Spannungsabfall am anderen Wi derstand sein? Aufg. 6.14: In einer Elektrolytlösung liegen zweifach positiv geladene Kupferionen Cu2+ vor. Der Aufbau wird so angepasst, dass eine Stromstärke von 1 A fließt. Wie lange dauert es, bis 10 g Kupfer an der negativ geladenen Elektrode abgeschieden wurden? Aufg. 6.15: Durch einen Kupferdraht fließt ein Strom der Stärke 10 A. Welche Fluss dichte hat das Magnetfeld 20 cm vom Mittelpunkt des Drahtes entfernt? Aufg. 6.16: Ein stromdurchflossener Draht befindet sich in einem Magnetfeld mit der Flussdichte 50 mT. Der Abschnitt des Drahtes, der sich im Magnetfeld befindet, ist 10 cm lang und die Stromstärke beträgt 2 A. Wie groß ist die Kraft, die auf den Draht ausgeübt wird, wenn dieser einen Winkel von 60° mit den Feldlinien einschließt?
252 | 6 Elektrizitätslehre Aufg. 6.17: Ein Proton bewegt sich mit 1 % der Lichtgeschwindigkeit senkrecht zu den Feldlinien eines Magnetfeldes mit einer Flussdichte von 100 mT. Welcher Radius er gibt sich für die daraus resultierende Kreisbahn? Aufg. 6.18: Bei Kupfer liegt der typische Wert der Hall-Konstante bei −5,3⋅10−11 m3 /C. Ein dünner Leiter mit einer Dicke von 1 mm befindet sich einem starken Magnetfeld der Stärke 1,5 T. Durch den Draht fließt ein Strom von 15 A. Welche Hall-Spannung wird dabei ungefähr gemessen? Aufg. 6.19: Ein elektrischer Leiter mit der Länge 10 cm bewegt sich mit der Geschwin digkeit 1 cm/s in einem homogenen Magnetfeld der Stärke 200 mT. Wie groß ist die gemessene Induktionsspannung? Aufg. 6.20: Eine quadratische Leiterschleife mit der Seitenlänge 10 cm befindet sich in einem Magnetfeld, dessen Flussdichte sich um 25 mT pro Sekunde vergrößert. Wie groß ist die induzierte Spannung, die an den Enden der Schleife abgegriffen werden kann? Aufg. 6.21: An eine Batterie mit der Leerlaufspannung 1,6 V wird ein Widerstand der Größe 27 Ω angeschlossen. Auf welchen Wert sinkt die Spannung, wenn der Innenwi derstand der Batterie 1 Ω beträgt? Aufg. 6.22: Eine Wheatstone-Brücke bestehe aus einer Schleifdrahtbrücke mit der Länge 1 m und einem Vergleichswiderstand mit dem Wert 27 Ω. Der Schleifkontakt befindet sich 30 cm vom Nullpunkt entfernt. Wie groß ist der unbekannte Widerstand? Aufg. 6.23: Ein Kondensator mit der Kapazität 1 mF wird über einen Widerstand von 27 kΩ entladen. Nach welcher Zeit ist die Spannung auf 10 % des ursprünglichen Wer tes gesunken? Aufg. 6.24: In einem Defibrillator wird ein Kondensator mit einer Kapazität von 200 μF auf eine Hochspannung von 4 kV aufgeladen. Anschließend wird der Kon densator in wenigen Millisekunden am Patienten entladen. Wie groß ist die dabei insgesamt freigesetzte Energie? Aufg. 6.25: Eine zylinderförmige Spule mit 150 Windungen habe einen Radius von 2 cm und eine Länge von 15 cm. In der Spule befindet sich ein Eisenkern mit der Per meabilitätszahl 5.000. Die Stromstärke ändert sich konstant um 10 mA pro Sekunde. Wie groß ist die dabei entstehende Induktionsspannung in der Spule? Aufg. 6.26: Eine Spule mit einer Induktivität von 2 H wird über einen Widerstand von 12 Ω an eine Spannungsquelle angeschlossen. Wie lange dauert es, bis der Strom auf 70 % des Maximalstroms gestiegen ist? Aufg. 6.27: Durch eine Spule mit der Induktivität 20 mH fließt ein Strom von 5 A. Wel che Energie ist im Magnetfeld der Spule gespeichert, steht somit nach dem Ausschal ten der Spannungsquelle wieder zur Verfügung?
Aufgaben | 253
Aufg. 6.28: Eine Leuchtdiode mit einer Vorwärtsspannung von 3,5 Volt soll mit einer Spannungsquelle von 5 V betrieben werden. Wie groß muss der Vorwiderstand ge wählt werden, damit ein Strom von 20 mA fließt? Aufg. 6.29: In drei voneinander getrennten Stromkreisen liegt jeweils eine Reihen schaltung von Widerständen, Spulen und Kondensatoren vor. Wie groß ist . . . a) der Gesamtwiderstand der Widerstände 100 Ω und 20 Ω? b) die Gesamtkapazität der Kondensatoren mit den Werten 50 μF, 10 μF und 250 nF? c) die Gesamtinduktivität der Spulen mit den Einzelwerten 30 mH, 120 mH und 240 mH? Aufg. 6.30: In drei voneinander getrennten Stromkreisen liegt jeweils eine Parallel schaltung von Widerständen, Spulen und Kondensatoren vor. Wie groß ist . . . a) der Gesamtwiderstand der Widerstände 100 Ω und 20 Ω? b) die Gesamtkapazität der Kondensatoren mit den Werten 50 μF, 10 μF und 250 nF? c) die Gesamtinduktivität der Spulen mit den Einzelwerten 30 mH, 120 mH und 240 mH? Aufg. 6.31: Zwei Widerstände mit den Werten 27 Ω und 14 Ω sind parallel geschal tet. Die Parallelschaltung ist wiederum einem Widerstand der Größe 56 Ω in Reihe geschaltet. Wie groß ist der Gesamtwiderstand der Schaltung? Aufg. 6.32: Eine runde Leiterschleife mit einem Radius von 10 cm dreht sich 20-mal pro Sekunde im homogenen Magnetfeld einer Zylinderspule. Die Flussdichte des Ma gnetfeldes beträgt 50 mT. Wie groß ist die maximale Induktionsspannung an den En den der Leiterschleife? Aufg. 6.33: Der Effektivwert der Netzwechselspannung beträgt 230 V. Wie groß ist dann die Scheitelspannung? Aufg. 6.34: An einen Kondensator mit einer Kapazität von 50 μF wird eine Wechsel spannung mit einem Scheitelwert von 5 V und einer Frequenz von 1 kHz angelegt. Wie groß ist der Scheitelstrom, der durch den Kondensator fließt? Aufg. 6.35: An einer Spule mit einer Induktivität von 50 mH wird eine Wechselspan nung mit einem Effektivwert von 50 V und einer Frequenz von 1 kHz angelegt. Wie groß ist der Effektivstrom, der durch die Spule fließt? Aufg. 6.36: Eine Spule mit der Induktivität 100 mH, ein Kondensator mit der Kapazität 100 μF und ein ohmscher Widerstand der Größe 220 Ω werden in Reihe an eine Span nungsquelle mit einer Frequenz 1 kHz angeschlossen. Wie groß ist die Impedanz der Schaltung? Aufg. 6.37: Eine Spule mit der Induktivität 100 mH, ein Kondensator mit der Kapazität 100 μF und ein ohmscher Widerstand der Größe 100 Ω werden parallel an eine Span
254 | 6 Elektrizitätslehre
nungsquelle mit einer Frequenz 5 kHz angeschlossen. Wie groß ist die Impedanz der Schaltung? Aufg. 6.38: Die Primärspule eines Transformators bestehe aus 23.000 Windungen. An diese werde eine Spannung von 230 V angelegt. Auf der Sekundärseite soll eine Span nung von 5 V erzeugt werden. Die aufgenommene Stromstärke auf der Primärseite be trägt 10 mA. a) Wie viele Windungen benötigt man dann für die Sekundärspule? b) Wie groß ist die maximal mögliche Stromstärke auf der Sekundärseite? Aufg. 6.39: Ein Kondensator mit der Kapazität 10 μF und eine Spule mit der Indukti vität 10 mH werden zu einem Schwingkreis zusammengeschlossen. Wie groß ist dann die Eigenfrequenz des Schwingkreises?
7 Optik 7.1 Übersicht Ausgehend von den im letzten Kapitel besprochenen elektromagnetischen Wellen fin det hier der Übergang zur Optik statt. Hierbei werden sowohl die physikalischen Ei genschaften von Licht als auch der Zusammenhang mit dem menschlichen Sehver mögen hergestellt. Dazu werden zunächst der Aufbau und die Funktionsweise des menschlichen Auges besprochen. Anschließend wird das Phänomen der Brechung und der Polarisation optischer Wellen genauer untersucht. Im weiteren Verlauf wer den die Welleneigenschaften von Licht vernachlässigt und optische Instrumente wie das Fernrohr oder das Mikroskop mithilfe der geometrischen Optik erklärt. Anschlie ßend wird erneut auf die Wellennatur des Lichts zurückgegriffen, um damit Interfe renzerscheinungen an Spalten und dünnen Schichten beschreiben zu können.
7.2 Das Auge 7.2.1 Aufbau Das menschliche Auge ist in Abbildung 7.1 schematisch dargestellt und aus physika lischer Sicht relativ einfach darstellbar. Es besteht im Wesentlichen aus der Hornhaut (Cornea), durch die Licht in das Innere des Auges gelangt. Dahinter befindet sich die Iris mit der Pupille, die eine Blende darstellt und deren Durchmesser veränderlich ist. Ihre Aufgabe ist das Abblenden von Licht bei starker Einstrahlung, damit die dahinter liegende Augenlinse und die Netzhaut (Retina) geschützt werden. Die Netzhaut selbst besteht aus dicht angeordneten Zäpfchen und Stäbchen, die als Sehzellen fungieren Pupille
Augenlinse
Stäbchen
Netzhaut
Zäpfchen
Lederhaut Glaskörper
Hornhaut Abb. 7.1: Eine stark vereinfachte Skizze des menschlichen Auges.
https://doi.org/10.1515/9783110692921-007
256 | 7 Optik
und das einfallende Licht in elektrische Signale umwandeln. An der Stelle des schärfs ten Sehens befinden sich fast ausschließlich Zäpfchen. Die Stelle mit der größten Dich te wird Macula lutea oder gelber Fleck genannt. Auch sonst überwiegt die Anzahl der Stäbchen im menschlichen Auge deutlich. Der Grund hierfür liegt darin, dass die Stäb chen viel lichtempfindlicher sind und bereits auf kleinste Mengen an Licht reagieren. Der Nachteil der Stäbchen ist allerdings, dass sie keine Farben unterscheiden können. Dies ist der Grund, warum ein Mensch in der Dämmerung, wenn nahezu ausschließ lich die Stäbchen aktiv sind, lediglich in Graustufen sehen kann. Sobald eine ausrei chend große Menge an Licht vorhanden ist, übernehmen die Zäpfchen, von denen es insgesamt drei verschiedene Sorten gibt.
7.2.2 Helligkeit und Farben
Relative Empfindlichkeit
Jede der drei Zäpfchensorten reagiert auf eine der drei Spektralfarben Rot, Grün oder Blau (RGB), wobei die Empfindlichkeit im grünen Spektralbereich besonders hoch ist, wie man aus Abbildung 7.2 entnehmen kann. Die Kurve des Tagsehens, auch V-Lambda-Kurve genannt, ergibt sich aus einer Überlagerung der Empfindlichkeiten der drei Zäpfchen. Die Empfindlichkeitskurve der Stäbchen ist, wie man der Abbil dung entnehmen kann, gegenüber den Zäpfchen etwas zu kleineren Wellenlängen hin verschoben. Überlagert man die drei Spektralfarben RGB, die auch Grundfarben genannt werden, so entsteht der Eindruck von weißem Licht. Die Überlagerung der einzelnen Farben nennt man additive Farbmischung. Farbmonitore arbeiten beispiels weise genau nach diesem Prinzip. Hier besteht ein Pixel aus drei Subpixeln, wobei jeder von ihnen eine der drei Grundfarben annehmen kann. Beim weißen Licht einer Glühbirne oder Sonne sind hingegen alle Farben des Regenbogens enthalten.
0.8
Nachtsehen
0.6 0.4
Tagsehen
0.2 0 300
400
500
600
700
Wellenlänge[nm] Abb. 7.2: Spektrale Empfindlichkeit des Auges für das Tagsehen (Zäpfchen) und Nachtsehen (Stäb chen). Beide Kurven wurden unabhängig voneinander normiert, sodass sie gleich hoch erscheinen.
7.2 Das Auge | 257
Abb. 7.3: Additive und subtraktive Farbmischung. Die sich bei der Überlagerung der Kreise ergeben de Mischfarbe ist gleichzeitig die Komplementärfarbe zu dem jeweils gegenüberliegenden Kreis.
Farben physikalischer Körper, wie zum Beispiel bedrucktes Papier, entstehen hingegen dadurch, dass aus dem gesamten Lichtspektrum einzelne Farbanteile ab sorbiert werden, sodass die verbleibenden Wellenlängen den Farbton der jeweiligen Komplementärfarbe annehmen. Dieses Verfahren wird subtraktive Farbmischung ge nannt. So ist zum Beispiel Gelb die Komplementärfarbe von Blau, denn ein Körper, der blaues Licht aus einem kontinuierlichen Spektrum absorbiert, erscheint gelblich. Die Komplementärfarbe von Grün ist Magenta, wohingegen die Komplementärfarbe von Rot der Farbe Cyan entspricht. Die drei Grundfarben der subtraktiven Farbmi schung sind somit Magenta, Cyan und Gelb, was die Zusammensetzung der Farben bei Tintenstrahl- oder Laserdruckern erklärt. Mischt man diese drei Farben, so wird das gesamte Spektrum absorbiert, sodass die resultierende Farbe Schwarz ist. Diese Zusammenhänge sind in Abbildung 7.3 illustriert, in der sowohl die additive Farbmi schung auf der linken Seite als auch die subtraktive Farbmischung auf der rechten Seite zu sehen sind. Die Blätter von Bäumen erscheinen beispielsweise deshalb grün, weil das in ihnen enthaltene Chlorophyll die blauen und roten Wellenlängen absorbiert. Übrig bleibt dann lediglich das grüne Spektrum, das vom Auge wahrgenommen wird. Dies kann experimentell mit Absorptionsmessungen überprüft werden. Die Ergebnisse einer sol chen Messung für die beiden Chlorophylle a und b sind in Abbildung 7.4 zu sehen. Man erkennt hier sehr gut die verringerte Absorption im grünlichen Bereich des Spektrums. Die höchste Empfindlichkeit der Netzhaut liegt bei einer Wellenlänge von 555 nm. Dies entspricht exakt der Wellenlänge, in der das Sonnenlicht mit maximaler Intensität auf der Erde auftrifft. Für größere und kleinere Wellenlängen fällt die Empfindlich keit des Auges stetig ab. Die Empfindlichkeit der Zäpfchen benachbarter Farben (Rot– Grün und Grün–Blau) überlappen sich außerdem deutlich. Dies hat zur Folge, dass beispielsweise weißes Licht bereits mit der Farbe Blau und der entsprechenden Kom plementärfarbe Gelb erreicht werden kann. Das menschliche Auge verarbeitet die Signale genau wie das menschliche Ohr lo garithmisch. Das ist notwendig, damit man sowohl kleinste Lichtmengen wie die einer
258 | 7 Optik 1.5
Absorption [a.u.]
Chlorophyll a Chlorophyll b 1
0.5
300
400
500
Wellenlänge[nm]
600
700
Abb. 7.4: Wellenlängenabhängige Absorption von Chlorophyll a und b in willkürlichen Einheiten (arbitrary units a.u.).
Kerzenflamme gut erkennen kann und gleichzeitig an hellen Sommertagen im Frei en nicht geblendet wird. Der Unterschied zwischen diesen beiden Leistungen beträgt ca. 28 Zehnerpotenzen! Um die spektrale Empfindlichkeit des Auges mit zu berück sichtigen, hat man Lumen (lm) als Einheit des Lichtstroms eingeführt. Diese Einheit entspricht der Strahlungsleistung einer Lichtquelle für eine bestimmte Wellenlänge in Watt multipliziert mit der Lichtempfindlichkeit des Auges bei dieser Wellenlänge. Integriert man anschließend über alle vorkommenden Wellenlängen, so erhält man als Ergebnis den Lichtstrom. Das bedeutet, dass zwei Lichtquellen mit derselben Leis tung eine unterschiedliche Lumenzahl haben, wenn das Spektrum der Lichtquellen stark voneinander abweicht. Für eine Lichtquelle, die Licht lediglich im Infrarot- oder Ultraviolettbereich aussendet, wäre der Lichtstrom identisch 0, da das menschliche Auge in diesem Bereich nicht empfindlich ist. Analog dazu definiert man noch die Be leuchtungsstärke als Lumen pro Quadratmeter. Die entsprechende Einheit hierfür ist Lux (lx). Häufig wird ebenfalls noch die Einheit Candela (cd) verwendet, was übersetzt Kerze bedeutet. Diese SI-Basiseinheit gibt an, wie viel Lumen pro Raumwinkel (Stera diant) ausgestrahlt werden, und ist somit ein Maß für die Lichtstärke. Eine Lichtquelle mit 1 cd besitzt ungefähr die Lichtstärke einer Kerze.
7.3 Brechung 7.3.1 Huygenssches Prinzip Lange Zeit wurde gerätselt, ob Licht ein Teilchen oder eine Welle ist. Eine der wich tigsten Hinweise auf die Wellennatur des Lichts war der sogenannte Poisson-Fleck, der entsteht, wenn wellenförmiges auf ein kugelförmiges Hindernis trifft. Das Licht wird dann so abgelenkt, dass hinter dem Objekt an einer Stelle, die das Licht eigentlich nicht erreichen dürfte, ein sehr heller Fleck zu sehen ist. Nach der Beobachtung dieses
7.3 Brechung |
259
Abb. 7.5: Überlagerung von huygensschen Elementarwellen zu einer neuen Wellenfront am Beispiel einer Kugelwelle.
Phänomens zusammen mit einigen theoretischen Herleitungen wurden die Zweifel an der Wellennatur des Lichts weitgehend ausgeräumt. Heute wissen wir, dass Licht eine elektromagnetische Welle mit einer kurzen Wellenlänge von einigen Hundert Nano metern ist und dass die Lichtfarbe von der Frequenz beziehungsweise der Wellenlänge bestimmt wird. Das huygenssche Prinzip besagt, dass von jedem Punkt einer Wellen front sogenannte Elementarwellen ausgesendet werden. In der Regel lassen sich die se Wellen als kugelförmige Wellen beschreiben. Die Elementarwellen, die von einer Wellenfront ausgehen, überlagern sich in jedem Punkt so, dass die Überlagerung die Wellenfront eine neue Welle ergibt. Dies ist in Abbildung 7.5 am Beispiel einer Kugel welle illustriert. Schneidet man nun durch Einbringen eines Hindernisses einen Teil der Welle ab, so breiten sich die Elementarwellen ebenfalls in Bereiche aus, die sonst für die Welle nicht zugänglich wären.
7.3.2 Snellius’sches Brechungsgesetz Wenn Lichtwellen auf transparente Materie treffen, dann regen sie die Elektronen darin zu erzwungenen Schwingungen an. Die schwingenden Dipole senden ihrerseits weitere Elementarwellen aus, die sich mit den bereits existierenden Wellen über lagern. Das Resultat daraus ist eine scheinbare Verlangsamung der Ausbreitungs geschwindigkeit von Licht in einem Medium. Das Verhältnis zwischen der Lichtge schwindigkeit c0 im Vakuum und der Lichtgeschwindigkeit c in einem Medium, zum Beispiel Glas oder Wasser, wird Brechungsindex n genannt: n=
c0 c
(7.1)
Da c stets kleiner als c0 ist, muss der Brechungsindex immer einen Wert größer als 1 besitzen. Typische Werte sind n = 1,33 für Wasser und n = 1,47 für Glas. Da es sich um erzwungene Schwingungen handelt, wird die Intensität des Lichts beim Durch laufen des Mediums ebenfalls gedämpft. Diese Dämpfung führt zu einer Absorption des Lichts, wodurch die Gesamtintensität verringert wird. Die Dämpfung hängt im Wesentlichen von der Atomdichte, d. h. der Anzahl der schwingenden Dipole, und
260 | 7 Optik
s1
1
2
α
3 s2
α
d β β
Abb. 7.6: Ein Lichtstrahl trifft auf ein transparentes Medium und wird aufgrund der unterschiedli chen Ausbreitungsgeschwindigkeiten an der Grenzfläche zwischen Luft und einem optisch dichteren Medium gebrochen.
der Differenz zwischen der Frequenz der Lichtwelle und der Resonanzfrequenz der Dipole ab. Um herauszufinden, wie sich ein Lichtstrahl verhält, der in ein transpa rentes Medium eindringt, betrachten wir zunächst die linke Seite von Abbildung 7.6. Der Lichtstrahl besteht aus einer großen Anzahl dichter Wellenfronten, die durch die Querbalken hervorgehoben sind. Der Abstand zwischen diesen Linien ist hierbei ein Maß für die Wellenlänge des Lichts. Von jedem Punkt der Wellenfronten breiten sich beim Eintritt des Strahls in ein Medium huygenssche Elementarwellen aus. Aufgrund des schrägen Einfalls entstehen diese Elementarwellen zeitversetzt. Während diese in Punkt 3 gerade entstehen, haben sie sich in Punkt 1 schon weiter fortgepflanzt. Wenn man eine Tangente an die jeweiligen Elementarwellen zeichnet, dann erhält man die sich ergebende Wellenfront des Lichts im Medium. Man erkennt sofort, dass der Licht strahl in einem Medium bedingt durch die geringere Geschwindigkeit seine Richtung ändert, d. h., er wird gebrochen. Den zugrunde liegenden Vorgang nennt man Bre chung. Der Winkel, um den der Strahl gebrochen wird, lässt sich quantitativ bestimmen. Auf der rechten Seite von Abbildung 7.6 ist ein Lichtstrahl eingezeichnet, der unter einem Winkel α gegenüber dem Lot der Grenzfläche zwischen zwei Medien (zum Bei spiel Luft und Wasser) eindringt. Nachdem die linke Seite einer beliebigen Wellenfront die Grenzfläche erreicht hat, muss die rechte Seite noch die Strecke s1 überwinden, welche sich wie folgt berechnen lässt: s1 = c1 t
(7.2)
Hierbei ist c1 die Lichtgeschwindigkeit im Medium 1 und t die verstrichene Zeit. Die gleiche Überlegung kann für den Lichtstrahl im zweiten Medium durchgeführt wer den: s2 = c 2 t , (7.3)
7.3 Brechung |
261
wobei hier die Ausbreitungsgeschwindigkeit c2 ist. Wenn der Lichtstrahl nach dem Eintritt gebrochen wird und nun den Winkel β gegenüber dem Lot hat, dann lassen sich mithilfe des Abstandes d zwischen den beiden Eintrittspunkten folgende Bezie hungen aufstellen: s1 s2 sin α = , sin β = (7.4) d d Teilt man beide Gleichungen durcheinander, dann fällt das unbekannte d heraus und man erhält: sin α s2 c1 = (7.5) = sin β s1 c2 Im letzten Schritt wurden die Strecken durch die Gleichungen (7.2) und (7.3) ersetzt. Als Letztes können die Ausbreitungsgeschwindigkeiten mithilfe von Gleichung (7.1) durch die Brechungsindizes ersetzt werden. Bringt man in der sich ergebenden Glei chung jeweils einen Winkel und den zugehörigen Brechungsindex auf eine Seite, dann erhält man das bekannte Snellius’sche Brechungsgesetz, das in der Literatur häufig in folgender Form zu finden ist: n1 sin α = n2 sin β
(7.6)
Das Medium mit dem geringeren Brechungsindex wird häufig als optisch dünneres Medium bezeichnet, wohingegen für das jeweils andere Medium der Begriff optisch dichter verwendet wird. Aus der Abbildung und dem Snellius’schen Brechungsgesetz lässt sich ableiten, dass Licht beim Eintritt in ein optisch dichteres Medium immer zum Lot hin gebrochen wird. Im umgekehrten Fall wird es demzufolge vom Lot weg gebrochen. Beim Verlassen des Mediums wird der Lichtstrahl dann erneut gebrochen. Man erkennt sofort, dass der Lichtstrahl nach dem Verlassen aufgrund der Symme trie des Brechungsgesetzes den gleichen Winkel wie zuvor beim Eintreten besitzt. Der Lichtstrahl wird lediglich um einen bestimmten Betrag parallel zu seiner ursprüng lichen Richtung verschoben. Im Alltag ist dieses Phänomen sehr gut bekannt. Wenn man einen Löffel in ein Glas mit Wasser stellt und schräg in das Glas hineinsieht, dann scheint der Teil des Löffels, der sich im Wasser befindet, seitlich versetzt zu sein. Wenn die Oberflächen des Mediums nicht parallel zueinander liegen, dann lässt sich der Lichtstrahl damit gezielt in bestimmte Richtungen lenken, wie wir später beim Auf bau von Linsen besprechen werden.
7.3.3 Optische Weglänge Aus den Gleichungen (7.2) und (7.3) folgt unmittelbar durch Umstellung nach t und anschließendes Gleichsetzen, dass das Verhältnis der jeweiligen Strecken und Ge schwindigkeiten in beiden Medien konstant ist: s1 s2 = c2 c1
(7.7)
262 | 7 Optik
Setzt man nun die Definition des Brechungsindex ein, dann erhält man als Bedingun gen für die beiden Strecken: (7.8) n1 s1 = n2 s2 Das Produkt aus Brechungsindex und Strecke L = ns
(7.9)
in einem Medium wird daher auch als optische Weglänge bezeichnet. Es handelt sich hierbei somit um die Strecke in einem Material mit dem Brechungsindex n, für die das Licht dieselbe Zeit wie im Vakuum oder näherungsweise in Luft benötigt.
7.3.4 Totalreflexion Totalreflexion kann immer dann auftreten, wenn ein Lichtstrahl ein optisch dichteres Medium verlässt, um in ein Medium mit geringerem Brechungsindex einzutauchen. Dies kann unmittelbar aus dem Brechungsgesetz abgeleitet werden: Vergrößert man den Winkel β kontinuierlich, dann erhöht sich der Wert von α ebenfalls. Ab einem be stimmten Winkel nimmt α den Wert 90° an. Dies ist der minimale Winkel für das Ein treten von Totalreflexion. Bei noch größeren Winkeln wird der Lichtstrahl vollständig in das optisch dichtere Medium reflektiert und kann demzufolge nicht entweichen. Wenn der Winkel α gleich 90° ist, dann hat der Sinus den Wert 1. Für die Bedingung, ab welchem Winkel Totalreflexion einsetzt, lässt sich demzufolge schreiben: β = arcsin (
n1 ) n2
(7.10)
Der minimale Winkel hängt demzufolge lediglich vom Verhältnis der beiden Bre chungsindizes n1 und n2 ab. Im Falle von Luft als optisch dünnerem Medium, wenn also n1 ≈ 1 gilt, reduziert sich die Abhängigkeit auf den Brechungsindex des optisch dichteren Mediums.
Abb. 7.7: Licht wird im Wasserstrahl einer Gießkanne mittels Totalreflexion transportiert und am Auftreffpunkt innerhalb der Markie rung sichtbar.
7.4 Polarisation
| 263
Das Prinzip der Totalreflexion kommt besonders häufig in der Wissenschaft und Technik in der Form von Lichtleitern zum Einsatz. Bei der Endoskopie wird zum Bei spiel das Licht einer starken Lichtquelle in einen starren oder flexiblen Lichtleiter ein gespeist, in dem sich das Licht über Totalreflexion bis in die Spitze ausbreitet. Dort tritt es aus und sorgt für eine ausreichende Beleuchtung der zu untersuchenden Stel le. Das von den Wänden der jeweiligen Hohlräume reflektierte Licht wird dann häufig über dünne Glasfasern, die ebenfalls als Lichtleiter fungieren und Bildleiter genannt werden, zum Auge des Arztes geleitet. Die einzelnen Glasfasern besitzen in der Regel Durchmesser von einigen Mikrometern, sodass insgesamt eine sehr hohe Auflösung erreicht werden kann. Moderne Geräte besitzen hingegen oft einen Kamerachip am Ende des Endoskops, womit das Bild digital übertragen werden kann.
Experiment: Geschüttetes Licht Wenn man eine Gießkanne mit Wasser füllt und anschließend eine helle Taschenlampe hineinlegt, dann wird ein Teil des Lichts beim Ausschütten im Strahl der Gießkanne total reflektiert. Der Strahl selbst leuchtet dabei in einem vollständig abgedunkelten Raum nur sehr schwach, da lediglich das Licht austreten kann, für das nicht die Totalreflexionsbedingung erfüllt ist. Dort, wo der Strahl auf einer Oberfläche auftrifft, wird das Licht dann durch Streuung sichtbar (Abbildung 7.7).
7.4 Polarisation Licht ist eine elektromagnetische Welle mit einem E-Feld-Vektor und einem B-FeldVektor. Beide Vektoren stehen senkrecht auf dem Ausbreitungsvektor der Welle. Be sitzt das elektrische Feld lediglich eine Schwingungsrichtung, so spricht man von ei ner linearen Polarisation. Wenn zwei oder mehr Wellen mit unterschiedlicher Orientie rung des elektrischen Feldes aufeinandertreffen, dann ergibt sich aus der Summe der E-Felder eine elliptische Polarisation, da die Vektoren des Feldes zu jedem Zeitpunkt vektoriell addiert werden müssen. Ein Spezialfall davon ist das zirkular polarisierte Licht, bei dem die Vektoren identische Längen haben. Der resultierende Feldvektor bewegt sich dann in Form einer Schraubenlinie um die Ausbreitungsrichtung herum. Zirkulare und lineare Polarisation sind die in der Natur am häufigsten vorkommenden Polarisationen von Lichtwellen. Der Verlauf des E-Feldstärkevektors für beide Polari sationsarten ist in Abbildung 7.8 dargestellt. Mithilfe sogenannter Polarisationsfolien lassen sich zirkular polarisierte Wellen linear polarisieren. Solche Folien bestehen im Wesentlichen aus langen Kunststoff molekülen, die durch Dehnung der Folie in eine bestimmte Richtung orientiert wer den. Die Elektronen können entlang dieser Molekülketten weitgehend ungehindert schwingen und dementsprechend Lichtwellen absorbieren. Senkrecht dazu kann das
264 | 7 Optik
z z
Abb. 7.8: Die Einhüllende des E-Feld-Vektors für eine linear und eine zirkular polarisierte Welle.
Licht allerdings ungehindert passieren. Es bleibt somit von den beiden E-Feld-Vekto ren, mit denen sich die zirkulare Polarisation beschreiben lässt, lediglich eine Kom ponente übrig, was insgesamt zu einer linearen Polarisation führt. Bringt man eine weitere Folie in den Strahlengang, so hängt die gemessene Intensität dahinter von der Drehrichtung der zweiten Polarisationsfolie ab. Wenn diese dieselbe Ausrichtung besitzt, dann ändert sich die Intensität nicht wesentlich. Wenn man die Folie hinge gen um 90° nach rechts oder links dreht, so wird das gesamte Licht absorbiert. Man kann sich daher leicht klarmachen, dass die Amplitude von E folglich mit dem Kosi nus des Drehwinkels α abnimmt. Für die Intensität, die proportional zum Quadrat der Amplitude ist, muss dementsprechend gelten: I = I0 cos2 α
(7.11)
Dieser Zusammenhang ist auch als das Gesetz von Malus bekannt, benannt nach dem französischen Ingenieur und Physiker Etienne Louis Malus. Es ist weiterhin leicht ein zusehen, dass das polarisierte Licht nach dem Durchlaufen der zweiten Folie deren Polarisationsrichtung einnimmt. In der Natur kommen ebenfalls viele optisch aktive Stoffe vor, die eine bestimmte Vorzugsrichtung besitzen. Beispiele hierfür sind verschiedene Quarzkristalle oder Zuckerlösungen. Genauso wie man sich zirkular polarisiertes Licht als Überlagerung
δ/2 E E
δ
Abb. 7.9: Drehung der Polarisationsrichtung bei optisch aktiven Stoffen.
7.5 Fresnelsche Formeln
| 265
zweier linear polarisierter Wellen vorstellen kann, ist dies umgekehrt ebenfalls mög lich. Linear polarisiertes Licht kann man sich dementsprechend wie in Abbildung 7.9 dargestellt äquivalent zu einer Überlagerung zweier zirkular polarisierter Wellen mit entgegengesetztem Drehsinn vorstellen. Zuckermoleküle besitzen aufgrund ih rer ringförmigen Struktur eine gewisse Vorzugsrichtung, die dafür sorgt, dass sich Licht mit demselben Drehsinn langsamer durch eine Zuckerlösung bewegt als Licht mit der entgegengesetzten Drehrichtung, sodass beispielsweise die rechtsdrehende Komponente des elektrischen Feldes nach einer gewissen Strecke um den Winkel δ gedreht wurde. Dies führt dann effektiv zu einer Drehung der Polarisationsrichtung des linear polarisierten Lichts um den Winkel δ/2, wie man der Abbildung 7.9 entneh men kann. Der Drehsinn ist dabei wie folgt definiert: Blickt man dem Licht entgegen und stellt dann eine Drehung der Polarisationsebene im Uhrzeigersinn fest, so nennt man den Stoff rechtsdrehend (+). Eine Drehung entgegen dem Uhrzeigersinn findet dementsprechend beim Durchgang durch ein linksdrehendes (−) Medium statt. Die Drehung der Polarisationsebene lässt sich mit einem sogenannten Polarime ter bestimmen. Dieses erzeugt zunächst mithilfe einer Polarisationsfolie linear pola risiertes Licht, dessen Polarisationsebene anschließend durch die zu untersuchende Lösung gedreht wird. Mit einer zweiten Folie kann anschließend der Winkel mit der größtmöglichen Absorption gemessen werden, woraus sich unmittelbar der Drehwin kel bestimmen lässt. Aus den bisherigen Betrachtungen ergibt sich eine Proportiona lität zwischen Drehwinkel und Konzentration bei gegebener Länge der Küvette, in der sich die Flüssigkeit befindet. Als Proportionalitätskonstante wird daher der spezifi sche Drehwinkel α 0 eingeführt, der somit eine stoffspezifische Größe ist und meistens für Raumtemperatur angegeben wird. Daher gilt für den Drehwinkel der Polarisations ebene nach einer Strecke l folgender Zusammenhang: ∆α = α 0 cl
(7.12)
Bei (linksdrehender) Fruktose hat er beispielsweise den Wert: α 0 = −92°
cm3 dm g
(7.13)
Die Einheiten wurden hierbei so gewählt, wie sie in der Literatur häufig vorzufinden sind. Bevor der Drehwinkel damit bestimmt werden kann, müssen allerdings alle Ein heiten korrekt umgerechnet werden.
7.5 Fresnelsche Formeln Wenn Licht auf die Grenzfläche zwischen zwei Materialien fällt, dann wird immer ein Teil des Lichts in das Medium transmittiert und der andere Teil reflektiert. Dies lässt sich am Beispiel von Fensterglas oder einer Wasseroberfläche besonders gut beob achten. Dort sieht man im Freien immer ein Spiegelbild der Umgebung, wobei dieses
266 | 7 Optik
Pi
Pr Ai
Ar
α α β
A0 β
At Pt
Abb. 7.10: Skizze zur Herleitung der fres nelschen Formeln.
umso deutlicher erscheint, je flacher der Betrachtungswinkel ist. Das Verhältnis von reflektierter und transmittierter Welle soll im Folgenden aus der Betrachtung der Ener giebilanz elektromagnetischer Wellen bestimmt werden. Zunächst betrachten wir Querschnitte der einfallenden Welle A e = A0 cos α, der reflektierten Welle A r = A0 cos α sowie der transmittierten Welle A t = A0 cos β, wobei die hier beleuchtete Fläche auf der Grenzschicht mit A0 bezeichnet wurde. Die ent sprechenden Zusammenhänge können aus Abbildung 7.10 entnommen werden. Dort sind sowohl die drei Flächen als auch die entsprechenden Leistungen bezeichnet. Aus dem Energieerhaltungssatz folgt nun, dass die transportierte Energie der einfallenden Welle gleich der Summe aus transportierter und reflektierter Energie sein muss. Damit gilt für die Leistungsbilanz: Pe = Pr + Pt (7.14) Die Leistungsdichte kann gemäß Gleichung (6.218) berechnet werden: Se =
c0 ε e E2e ne
(7.15)
Um daraus die Leistung zu berechnen, muss dieser Wert noch mit der Fläche A e mul tipliziert werden. Zusammen mit c 1 = n √ε0 μ 0 ε r,e μ r,e
(7.16)
ε e = ε0 ε r,e
(7.17)
und ergibt sich für die einfallende Leistung: Pe = Se Ae = √
ε0 ε r,e 2 E A0 cos α μ 0 μ r,e e
(7.18)
Die Leistungen der transmittierten und reflektierten Welle lassen sich analog dazu herleiten. Somit erhält man für die Summe: √
ε0 ε r,e 2 ε0 ε r,e 2 ε0 ε r,t 2 E A0 cos α = √ E A0 cos α + √ E A0 cos β μ 0 μ r,e e μ 0 μ r,e r μ 0 μ r,t t
(7.19)
7.5 Fresnelsche Formeln | 267
Zur Vereinfachung soll im Folgenden davon ausgegangen werden, dass die Per meabilitäten μ r,e und μ r,t der beiden Materialien identisch 1 sein sollen, da wir bereits im vorherigen Kapitel festgestellt haben, dass diese Bedingung für die meisten nichtferromagnetischen Materialien gut erfüllt ist. Die Gleichung vereinfacht sich damit wie folgt: ε r,t 2 E2e cos α = E2r cos α + √ E cos β (7.20) ε r,e t Jetzt lässt sich die Differenz schreiben als E2e − E2r = (E e − E r )(E e + E r ) = √
ε r,t 2 cos β E ε r,e t cos α
(7.21)
Im nächsten Schritt zerlegen wir das elektrische Feld der unpolarisierten Welle in eine senkrecht zur Einfallsebene stehende E⊥ und eine parallele Komponente E‖ , wobei der Energieerhaltungssatz für beide Komponenten unabhängig voneinander gelten muss: E e,⊥ + E r,⊥ = E t,⊥ (7.22) Die Division durch die zuvor genannte Gleichung führt unter Anwendung der dritten binomischen Formel zu: cos β E e,⊥ − E r,⊥ = nE t,⊥ , (7.23) cos α wobei hier noch der relative Brechungsindex n zwischen den beiden Medien über die Beziehung ε r,t n=√ (7.24) ε r,e eingeführt wurde. Durch Eliminierung von E r,⊥ beziehungsweise E t,⊥ können sowohl der Transmissionskoeffizient t⊥ als auch der Reflexionskoeffizient r⊥ bestimmt wer den. Unter Verwendung einiger algebraischer Beziehungen und des Snellius’schen Brechungsgesetzes erhält man dann √n2 − sin2 α − cos α E r,⊥ =− E e,⊥ n2 − 1
(7.25)
E t,⊥ 2 cos α √n2 − sin2 α − 2 cos2 α = E e,⊥ n2 − 1
(7.26)
r⊥ = und analog dazu t⊥ =
Auf dieselbe Art lassen sich der Reflexionskoeffizient r‖ =
E r,‖ n2 cos α − √n2 − sin2 α = E e,‖ n2 cos α + √n2 − sin2 α
(7.27)
268 | 7 Optik r 2, t 2
r2, t2 1
1
0°
45°
90° α
0°
45°
90° α
Abb. 7.11: Grafische Darstellung der fresnelschen Formeln für die Polarisation senkrecht zur Einfalls ebene (links) und parallel zur Einfallsebene (rechts). Die durchgezogenen Linien repräsentieren die Reflexion und die gestrichelten Linien die Transmission.
und der Transmissionskoeffizient t‖ =
E t,‖ 2n cos α = E e,‖ n2 cos α + √n2 − sin2 α
(7.28)
berechnen. Diese vier Gleichungen, die die Transmission und Reflexion von elektromagneti schen Wellen an Grenzflächen beschreiben und in dieser Schreibweise lediglich vom Einfallswinkel α abhängen, werden in der Literatur häufig als fresnelsche Formeln be zeichnet. Es ist dabei zu beachten, dass hier lediglich die Verhältnisse der Amplituden hergeleitet wurde. Um die Reflexions- und Transmissionskoeffizienten der messbaren Intensitäten zu bestimmen, muss jeweils das Quadrat von r und t berechnet werden. Aufgrund der Erhaltung der Energie muss dann gelten: r2 + t2 = 1
(7.29)
Das bedeutet, dass die Summe der Intensitäten aus reflektiertem und transmittiertem Licht immer gleich 100 % sein muss. Der linke Graph in Abbildung 7.11 zeigt die quadrierten Tranmissions- und Refle xionskoeffizienten für einen E-Feldvektor senkrecht zur Einfallsebene in Abhängig keit des Einfallswinkels α. Der rechte Graph zeigt hingegen den Verlauf der beiden quadrierten Koeffizienten für eine parallele Polarisation. Für beide Fälle wurde ein re lativer Brechungsindex von 1,5 gewählt. Man erkennt sofort, dass umso mehr Licht von der Oberfläche reflektiert wird, je flacher das Licht auf die Grenzfläche fällt. Bei senkrechtem Einfall wird hingegen das gesamte Licht transmittiert. Im Falle von par allel polarisiertem Licht ergibt sich, wie im rechten Graphen zu sehen ist, eine Beson
7.5 Fresnelsche Formeln
| 269
derheit für Winkel zwischen 45° und 90°, da die Kurve des Reflexionskoeffizienten die x-Achse an einer Stelle berührt und erst danach wieder ansteigt. Das bedeutet, dass die reflektierte Welle bei diesem Einfallswinkel, der auch Brewster-Winkel ge nannt wird, vollständig senkrecht polarisiert ist, da der parallele Anteil von E kom plett transmittiert wird. Dieser Effekt wird manchmal auch benutzt, um zirkulares Licht linear zu polarisieren, wobei der Prozess dann meistens mehrmals hinterein ander durchgeführt wird, um den Polarisationsgrad zu erhöhen. Dieser ist über den Quotienten P=
|I‖ − I⊥ | I‖ + I⊥
,
(7.30)
definiert, wobei I‖ und I⊥ die jeweiligen Intensitäten des parallel und senkrecht po larisierten Anteils des Lichts sind. Die Definition wurde so gewählt, dass im Falle von zirkular polarisiertem Licht I‖ = I⊥ gilt und der Polarisationsgrad entsprechend zu P = 0 wird. Ist das Licht hingegen vollkommen linear polarisiert, so sind sowohl Zäh ler als auch Nenner gleich 1, was P = 1 zur Folge hat. Bei teilweise polarisiertem Licht nimmt P dementsprechend einen Wert zwischen 0 und 1 an. Für den Übergang von einem optisch dichteren in ein optisch dünneres Medium muss stattdessen der Kehrwert von n verwendet werden. Dies hat zur Folge, dass die Kurvenverläufe ähnlich aussehen, aber bereits beim Winkel, unter welchem Totalre flexion stattfindet, den Wert 1 (Reflexion) beziehungsweise 0 (Transmission) anneh men und diesen Wert für alle größeren Winkel beibehalten. In Abbildung 7.11 enden diese Kurven daher zwischen 41° und 42°. In der Natur kommt linear polarisiertes Licht nicht sehr häufig vor. Stattdessen ist das Licht der Sonne und der meisten künstlichen Lichtquellen zirkular polarisiert. In
Abb. 7.12: Reflexion der Digitalanzeige einer Uhr durch einen Polfilter. Je nach Drehrichtung lässt sich entweder die direkte Reflexion (links) oder die diffuse Streuung des Umgebungslichts (rechts) hervorheben.
270 | 7 Optik
Experiment: Polarisationsfilter Man kann die fresnelschen Formeln sehr gut mithilfe handelsüblicher Polarisationsfilter sichtbar machen. Betrachtet man die Reflexion eines Objektes und dreht den Polfilter anschließend um 90°, so kann man im Idealfall die Reflexion vollständig verschwinden lassen (Abbildung 7.12). Beson ders eindrucksvoll funktioniert dies mit Fensterscheiben, wenn es im Zimmer deutlich heller als draußen ist. Je nach Richtung des Polfilters lässt sich einmal das Innere des Hauses und einmal der Außenbereich betrachten.
diesem Fall kann ein effektiver Reflexionskoeffizient wie folgt angegeben werden: r2eff =
1 2 (r + r2⊥ ) 2 ‖
(7.31)
Es handelt sich hierbei somit um einen Mittelwert der beiden quadrierten Reflexions koeffizienten für parallel und senkrecht polarisiertes Licht.
7.6 Dispersion Wie bereits beschrieben entsteht Lichtbrechung in einem Medium, indem die Elek tronen zu Schwingungen angeregt werden und sich die ausgesandten Wellen zu einer neuen Welle im Medium überlagern. Bei den erzwungenen Schwingungen wurde be reits gezeigt, dass die Amplitude, die hierbei mit dem Brechungsindex und somit mit der Lichtgeschwindigkeit im Medium verglichen werden kann, eine Funktion der Erre gerfrequenz ist. Damit wird deutlich, dass auch der Brechungsindex keine Konstante ist, sondern eine Funktion der Wellenlänge des Lichts, sodass man häufig n = n(λ) schreibt. Diese Abhängigkeit von λ wird als Dispersion bezeichnet. In Abbildung 7.13 ist der Brechungsindex von Glas in Abhängigkeit der Wellenlänge im sichtbaren Spek
Brechungsindex
1,55
1,54
1,53
1,52
300
400
500
600
Wellenlänge[nm]
700
800
Abb. 7.13: Änderung des Brechungs index von Glas in Abhängigkeit der Wellenlänge.
7.6 Dispersion
| 271
trum des Lichts abgebildet. Er wandert von einem Wert bei etwa 1,55 für blaues Licht bis etwas über 1,51 für rotes Licht. Sie hat zur Folge, dass Licht mit unterschiedlichen Wellenlängen unterschiedlich stark gebrochen wird, womit sich beispielsweise auch die Entstehung eines Regenbo gens erklären lässt. Hierbei trifft das Licht auf kleine Wassertropfen in der Atmosphäre und wird von diesen gebrochen. An der Rückseite der Tropfen wird das Licht reflektiert und beim Austritt erneut gebrochen. Das weiße Licht fächert sich aufgrund der Disper sion im Medium in seine Spektralfarben, wobei sich mathematisch oder mithilfe von Simulationen zeigen lässt, dass unter einem Winkel von etwa 42° zur Sonneneinstrah lung ein Maximum der Lichtintensität vorliegt, was sich als Regenbogen bemerkbar macht. Oft erkennt man noch einen weiteren, deutlich schwächeren Sekundärregen bogen, auch Nebenregenbogen genannt, der unter einem Winkel von etwa 51° ent steht, indem das Licht an der Rückseite des Wassertopfens zweimal reflektiert wird. Dadurch kehrt sich ebenfalls die Farbreihenfolge um. Abbildung 7.14 zeigt sowohl den Haupt- als auch den Nebenregenbogen, der durch Sonnenstrahlen erzeugt wird, die im benötigten Winkel auf Spritzwasser aus einem Gartenschlauch treffen.
Abb. 7.14: Berechneter Strahlengang in einem Wassertropfen (links) zur Erzeugung eines Regenbo gens und ein mit Spritzwasser künstlich erzeugter Regenbogen (rechts). Der deutlich schwächere Nebenregenbogen mit umgekehrter Farbreihenfolge ist in der oberen linken Bildecke ebenfalls zu erkennen.
weiß
rot blau
Abb. 7.15: Aufspaltung von weißem Licht in Spektralfarben an einem Prisma (links) sowie die Spek trallinien einer Heliumlampe durch Brechung an einem Prisma sichtbar gemacht (rechts).
272 | 7 Optik
Experiment: Lichtbrechung mit Prisma Um die Dispersion von Licht in einem Medium zu demonstrieren, kann man mit einer Lampe einen fokussierten Strahl von weißem Licht auf ein Prisma lenken und das entstehende Farbmuster auf einem entfernten Schirm oder mittels eines Okulars sichtbar machen. Das Licht wird hierbei so wohl beim Ein- als auch beim Austritt gebrochen. Durch Einstellen des richtigen Eintrittswinkels lässt sich die Lichtbrechung stark erhöhen. Man erkennt dann deutlich die einzelnen Farbanteile des weißen Lichts, angefangen bei rot über grün bis hin zu violett, sofern ein geeignetes Leucht mittel verwendet wird, das alle Anteile des Spektrums enthält. Anstelle einer normalen Glühlampe kann ebenfalls ein Leuchtmittel verwendet werden, das lediglich bestimmte Spektrallinien emit tiert. Hierzu wären beispielsweise eine Heliumlampe (s. Abbildung 7.15) oder eine Quecksilber dampflampe geeignet.
7.7 Geometrische Optik 7.7.1 Lochkamera Die einfachste Art, eine Abbildung zu erzeugen, ist die Verwendung eines lichtdichten Kastens mit einem sehr dünnen Loch mit dem Durchmesser D in einer der Wände und einem Schirm auf der Innenseite. Diese Anordnung wird Lochkamera genannt und ist in Abbildung 7.16 skizziert. Lichtstrahlen fallen dann von einem im Abstand g be findlichen Gegenstand G durch das Loch auf den Schirm. Der Abstand zwischen Loch und Schirm wird mit b bezeichnet. Jeder Punkt des Gegenstandes erzeugt somit eine Kreisscheibe mit dem Durchmesser S auf dem Schirm. Um die S in Abhängigkeit der anderen Parameter zu bestimmen, wird der Strahlensatz verwendet, der zu folgender Relation führt: g g+b = (7.32) D/2 S/2
G
D
g
S B
b
Abb. 7.16: Skizze zur Herleitung der Auflösung sowie des Abbildungsmaßstabes einer Lochkamera.
7.7 Geometrische Optik | 273
Kürzt man die 2 im Nenner und stellt die sich ergebende Gleichung nach S um, so erhält man: S=
g+b D g
(7.33)
Das Bild erscheint daher umso schärfer, je kleiner der Lochdurchmesser ist. Ab einer gewissen Größe kann aufgrund von Beugungserscheinungen bedingt durch die Wellennatur des Lichts allerdings keine Verbesserung mehr erzielt werden. Im Gegenteil: Unterschreitet man eine bestimmte optimale Lochgrenze wird die Bild qualität wieder schlechter. Da das Loch so klein ist, ist die Lichtstärke natürlich deut lich kleiner als die von fokussierenden Objektiven. Lochblenden werden allerdings auch bei optischen Geräten wie Fotoapparate in Kombination mit Linsen verwendet, da sie die Tiefenschärfe erhöhen. Im nächsten Schritt soll noch der Abbildungsmaß stab einer Lochkamera bestimmt werden. Hierzu wird erneut der Strahlensatz verwen det: B b = G g
(7.34)
Unabhängig von der Lochgröße steigt die Größe der Abbildung direkt proportional zum Verhältnis von b und g. Dasselbe Verhältnis werden wir später bei der Betrach tung von Linsenabbildungen ebenfalls wieder erhalten.
7.7.2 Linsen Linsen sind aus dem Alltag kaum wegzudenken und kommen auch im medizini schen Bereich bei bildgebenden Verfahren oft zum Einsatz. In der Regel werden gan ze Systeme aus Linsen verwendet, um Abbildungsfehler zu minimieren oder starke Vergrößerungen zu erzielen. Um quantitative Betrachtungen durchführen zu kön nen, betrachten wir zunächst die Brechung von Lichtstrahlen an einer gekrümmten Fläche, wobei wir uns in den folgenden Abschnitten auf kugelförmige (sphärische) Flächen beschränken wollen, da einige Berechnungen dann einfacher durchgeführt werden. Außerdem beschränken wir uns auf paraxiale Strahlen, die lediglich einen sehr kleinen Abstand zur Symmetrieachse haben, die auch optische Achse genannt wird. Dieses Verfahren ist als Gauß’sche Näherung bekannt und wird verwendet, um nachfolgende Herleitungen und Rechnungen einfacher durchführen zu können. Ein zur optischen Achse paralleler Lichtstrahl falle hierzu auf die Grenzfläche zwi schen zwei Medien mit unterschiedlichen Brechungsindizes. Der Abstand zwischen dem Schnittpunkt von Kugeloberfläche und optischer Achse sowie dem Schnittpunkt vom gebrochenen Strahl und der optischen Achse wird Brennweite f genannt. Aus Abbildung 7.17 liest man folgende Beziehung zwischen dem Kugelradius R und der
274 | 7 Optik
β α h
R
γ
α M
F
f Abb. 7.17: Skizze zur Herleitung der Brennweite einer kugelförmig gekrümmten Oberfläche.
Brennweite f ab: R sin α = f sin γ
(7.35)
Außerdem ergibt sich aus der Skizze die folgende Beziehung aufgrund der Innenwin kelsumme von 180° in einem Dreieck: 180° − γ − β = 180° − α
(7.36)
Dies führt dann unmittelbar zu folgender Relation zwischen den drei Winkeln: γ=α−β
(7.37)
Eingesetzt in die oben stehende Gleichung und Umformen nach f liefert damit: f =
sin α R sin(α − β)
(7.38)
Im nächsten Schritt kann der Nenner mit der trigonometrischen Beziehung sin(α − β) = sin α cos β − cos α sin β
(7.39)
umgeschrieben werden: f =
sin α R sin α cos β − cos α sin β
(7.40)
Unter Verwendung der Gauß’schen Näherung sind die Winkel vernachlässigbar klein, sodass der Kosinus stets den Wert 1 annimmt und der Sinus des Winkels gleich dem Winkel selbst ist: α f = R (7.41) α−β Setzt man jetzt noch das Snellius’sche Brechungsgesetz ein, um β zu eliminieren, so erhält man nach einem Umformen des Bruches: n2 R (7.42) f = n2 − n1 Hierbei bezeichnen n1 den Brechungsindex des äußeren und n2 den des inneren Me diums. Somit ist die Brennweite direkt proportional zum Krümmungsradius der Kugel oberfläche. Völlig analog dazu müssen bei der Berechnung der Brennweite für einen
7.7 Geometrische Optik | 275
Lichtstrahl, der vom optisch dichteren in das optisch dünnere Medium eintritt, aus Symmetriegründen die beiden Brechungsindizes vertauscht werden: f =
n1 R n1 − n2
(7.43)
Eine Linse besitzt immer zwei Grenzflächen. Ist lediglich eine dieser beiden Seiten gekrümmt, d. h., der Radius der anderen Seite ist unendlich groß, so findet dort beim Einfall von parallelem Licht keine Brechung statt und die Gesamtbrennweite der Linse ergibt sich unmittelbar aus Gleichung (7.43). Besitzen beide Seiten allerdings dieselbe Krümmung, so ist sofort ersichtlich, dass die Gesamtbrennweite halb so groß ist wie die Brennweite jeder einzelnen Seite. Im allgemeinen Fall müssen folglich – analog zur Parallelschaltung von Widerständen – die Radien invers addiert werden. Daraus folgt die sogenannte Linsengleichung (manchmal auch Linsenschleiferformel genannt): 1 1 n2 − n1 1 − = ( ) f n1 R1 R2
(7.44)
Das Minuszeichen ergibt sich aus der Definition der Krümmungsrichtung und dem damit verbundenen Vorzeichenwechsel von R. Der Radius hat einen positiven Wert, wenn ein Lichtstrahl zuerst auf die Linsen oberfläche trifft und dann den Mittelpunkt der Krümmung passiert, andernfalls ist er negativ. Je nach Richtung der Krümmung spricht man von einer konvexen (vom Mit telpunkt weg) und einer konkaven (zum Mittelpunkt hin) Linsenfläche. Liegt die Linse zwischen der Grenzfläche, an der das Licht gebrochen wird, und dem Mittelpunkt des Krümmungsradius, spricht man von einer konvexen Linse (Sammellinse). Im umge kehrten Fall erhält man eine konkave Linse (Zerstreuungslinse). Tritt das Licht nach einander durch zwei Flächen, so erhält man eine Linse. Man unterscheidet dabei all gemein zwischen den Formen – Plankonvex: Eine Seite ist flach und die andere konvex. – Bikonvex: Beide Seiten sind konvex gekrümmt. – Bikonkav: Beide Seiten sind konkav gekrümmt. – Plankonkav: Eine Seite ist flach und die andere konkav. – Konvex-konkav: Eine Seite ist konvex und die jeweils andere konkav. Alle die hier aufgelisteten Formen sind in derselben Reihenfolge in Abbildung 7.18 ab gebildet. Wie man an dieser Übersicht bereits sieht, können beide Grenzflächen iden tische oder unterschiedliche Radien R1 und R2 haben. Bis jetzt haben wir immer angenommen, dass der Abstand d zwischen den beiden Flächen vernachlässigbar klein ist und die Brechung lediglich an einer mittleren Ebe ne stattfindet. In diesem Fall spricht man von einer dünnen Linse. Diese Näherung ist in der Praxis meistens recht gut erfüllt. Wenn die Dicke d hingegen mit berücksichtigt werden muss, dann muss beachtet werden, dass die Brechung wie in Abbildung 7.19
276 | 7 Optik
Abb. 7.18: Die wichtigsten Linsenformen und Kombinationen mit konvexen und konkaven Flächen: plankonvex, bikonvex, bikonkav, plankonkav, konvex-konkav.
d H1
H2
F
F
f
f
Abb. 7.19: Brechung von parallel einfallendem Licht an den beiden Hauptebenen einer dicken Linse.
skizziert an zwei Ebenen in der Linse stattfindet, die als Hauptebenen bezeichnet wer den. Für eine solche dicke Linse ist die Linsengleichung dann noch um einen zusätz lichen Term zu erweitern, was zu folgender Beziehung führt: 1 (n2 − n1 )2 d 1 n2 − n1 1 ( − )+ = f n1 R1 R2 n2 n1 R1 R2
(7.45)
Die algebraische Herleitung dieser Formel erfordert ein wenig Schreibarbeit. Sie wird daher aus Platzgründen weggelassen, kann aber in vielen gängigen Physikbüchern in den Grundlagen zur Optik nachgeschlagen werden. Die Lage der Hauptebenen ist oft schwer zu bestimmen. Deshalb werden bei der praktischen Bestimmung von Brenn weiten dicker Linsen häufig spezielle Verfahren wie das sogenannte Bessel-Verfahren angewendet, bei denen die Lage der Hauptebenen für die Bestimmung von f keine Rolle spielt. Abbildung 7.20 zeigt ein Beispiel für das Auftreffen von parallelem Licht (von links kommend) auf jeweils eine bikonvexe und eine bikonkave Linse. Die konvexe Linse sammelt das Licht und wird daher auch Sammellinse genannt. Die konkave Linse zer
7.7 Geometrische Optik | 277
F
F
Abb. 7.20: Eine konvexe Linse sammelt von links kommendes, paralleles Licht im rechten Brenn punkt (links), wohingegen es von einer konkaven Linse zerstreut wird (rechts). Die gepunktete Linie repräsentiert die Verlängerung der gestreuten Strahlen, die sich im linken Brennpunkt schneiden.
streut hingegen das Licht. Man bezeichnet diesen Linsentyp daher auch als Zerstreu ungslinse. Aus Symmetrieüberlegungen wird klar, dass sich die Strahlen der konka ven Linse nach links verlängern lassen, sodass sie sich im gegenüberliegenden Brenn punkt schneiden. Eine Zerstreuungslinse erzeugt daher eine virtuelle Abbildung, die sich nicht auf einem Schirm darstellen lässt.
7.7.3 Abbildungsgleichung Jeder Punkt eines Gegenstandes sendet Lichtstrahlen in alle Richtungen aus. Abbil dung 7.21 zeigt den Strahlengang von drei ausgewählten Lichtstrahlen, die vom höchs ten Punkt eines Gegenstandes der Höhe G ausgesendet werden. Mithilfe dieser drei Lichtstrahlen soll sowohl die Abbildungsgleichung dünner (Sammel-)Linsen als auch deren Vergrößerungsfaktor hergeleitet werden. Zunächst betrachtet man den Strahl,
G
F
M
F
O’
O f
f
B
S g
b
Abb. 7.21: Skizze zur Herleitung der Abbildungsgleichung für dünne Linsen.
278 | 7 Optik
der parallel zur optischen Achse der Linse verläuft. Dieser wird an der Hauptebene der Linse gebrochen und verläuft anschließend durch den hinteren Brennpunkt F der Lin se. Ein weiterer wichtiger Strahl ist der sogenannte Mittelpunktstrahl, der durch die Mitte der Linse verläuft und diese in derselben Richtung wieder verlässt. Beide Strah len treffen sich in einem gemeinsamen Punkt B, der als Bildpunkt von G bezeichnet wird. Obwohl der Bildpunkt bereits durch diese beiden Strahlen definiert ist, ist es nützlich, noch einen weiteren Strahl zu betrachten. Dieser geht zunächst durch den vorderen Brennpunkt der Linse und wird dann von dieser so gebrochen, dass er nach dem Austritt parallel zur optischen Achse verläuft und die anderen beiden Strahlen ebenfalls im Punkt B schneidet. Der Abstand zwischen dem Gegenstand und der Hauptebene der Linse wird Ge genstandsweite g genannt, wohingegen der Abstand zwischen Linse und Bild als Bildweite b bezeichnet wird. Um einen Zusammenhang zwischen Brennweite, Gegen standsweite und Bildweite zu ermitteln, ist es nützlich, zunächst den Abbildungsmaß stab, analog zur Lochkamera, als das Verhältnis von Bildgröße zu Gegenstandsgröße zu definieren: M=
B G
(7.46)
Der Abbildungsmaßstab kann daher als Vergrößerungsfaktor der Linse angesehen werden, falls M größer als der Wert 1 ist. Bei Werten kleiner als 1 wird das Bild dem zufolge verkleinert dargestellt. Betrachtet man die beiden Dreiecke MOG und MO’B, dann ergibt sich durch Anwendung des Strahlensatzes die Beziehung: G B = g b
(7.47)
Umgeformt erhält man damit einen Zusammenhang zwischen dem Vergrößerungsfak tor der Linse und dem Verhältnis von Bild- zu Gegenstandsseite: B b = G g
(7.48)
Beide Größen b und g können allerdings nicht beliebig gewählt werden, da sich die Lichtstrahlen sonst nicht mehr in einem Punkt treffen und somit kein scharfes Bild entsteht. Im Folgenden soll daher der Zusammenhang zwischen Bildweite, Gegen standsweite und Brennweite hergeleitet werden. Dieses Mal werden die beiden Dreiecke FOG und FMS betrachtet. Durch erneute Anwendung des Strahlensatzes lässt sich daraus folgende Beziehung herleiten: G B = f b−f
(7.49)
Dies lässt sich leicht in folgende Form umschreiben: B b−f = G f
(7.50)
7.7 Geometrische Optik
| 279
Ersetzt man nun die linke Seite durch die Beziehung in Gleichung (7.48), dann erhält man: b b b−f = = −1 (7.51) g f f Multipliziert man jetzt beide Seiten mit f und dividiert die sich ergebende Gleichung durch b, dann erhält man nach weiteren algebraischen Vereinfachungen die als Ab bildungsgleichung bezeichnete Beziehung zwischen den drei genannten Größen: 1 1 1 = + f b g
(7.52)
Da die Brennweite einer Linse durch ihren Radius vorgegeben ist, lassen sich in den meisten Apparaturen lediglich die Bildweite durch Verschieben des Schirms und/ oder die Gegenstandsweite durch einen größeren Abstand zwischen Linse und Gegen stand verändern. Beide Werte müssen dabei aber stets so gewählt werden, dass die Abbildungsgleichung erfüllt ist, um ein scharfes Bild zu erzeugen. Man berechnet die Werte, indem die Abbildungsgleichung jeweils nach g oder b umgestellt wird. Für die Bildweite bei gegebener Gegenstandsweite und Brennweite folgt dann beispielsweise: b=
1 f
1 −
1 g
=
fg f −g
(7.53)
Hierbei wurden die Nenner gleichnamig gemacht, um die Schreibweise der Gleichung zu vereinfachen. Durch Vertauschen von b und g lässt sich die Gegenstandsweite bei bekannter Bildweite auf die gleiche Weise errechnen, was aufgrund der Symmetrie zwischen diesen beiden Größen in der Abbildungsgleichung sofort ersichtlich ist. In teressant sind die Fälle, in denen g entweder gleich groß wie f ist, d. h. der Gegen stand in der Brennebene liegt, und in denen g kleiner als f ist. Im ersten Fall ist der Nenner identisch 0, wobei eine Division durch 0 mathematisch nicht definiert ist. Die ser Umstand lässt sich physikalisch direkt aus der zugehörigen Skizze ableiten, da die Strahlen durch den vorderen Brennpunkt die Hauptebene der Linse dann nicht mehr schneiden. Die gleiche Begründung gilt für Gegenstandsweiten, die kleiner als f sind. In all diesen Fällen ist eine Abbildung nicht möglich, sodass stets die Bedingung g > f erfüllt sein muss, um eine reelle Abbildung zu erhalten. Der Zusammenhang zwischen Vergrößerung und Brennweite lässt sich bereits qualitativ aus Abbildung 7.21 ablesen. Je größer die Brennweite eines Objektivs ist, desto näher rückt der Brennpunkt F an den Gegenstand G heran. Dadurch verschieben sich der Schnittpunkt S und somit der Bildpunkt ebenfalls weiter von der optischen Achse weg, was zu einer vergrößerten Darstellung führt. Dieser Zusammenhang kann ebenfalls quantitativ dargestellt werden. Dazu ersetzt man b in der Abbildungsglei chung mit der Beziehung aus Gleichung (7.48). Damit erhält man: G 1 1 = + f gB g
(7.54)
280 | 7 Optik
Im ersten Summanden lässt sich das Verhältnis von G und B mit Gleichung (7.46) durch die Vergrößerung M ersetzen. Das ergibt: 1 1 1 = + (7.55) f Mg g Im nächsten Schritt wird die gesamte Gleichung mit g multipliziert: 1 g = +1 f M
(7.56)
Bringt man nun die 1 auf die linke Seite und bildet den Kehrwert der Gleichung, dann erhält man unmittelbar folgende Beziehung: 1 M= g −1 f
(7.57)
Diese Formel bestätigt den bereits gefundenen Zusammenhang zwischen f und g: Je näher g und f zusammenliegen, desto größer ist der Wert für M. Für den Fall, dass f und g gleich groß werden, wird das Verhältnis 1 und der Nenner nimmt den Wert 0 an. Aus physikalischer Sicht wird die Vergrößerung deshalb unendlich, sodass kein reelles Bild mehr entstehen kann. Falls g kleiner als f ist, ist M negativ, was aus physi kalischer Sicht ebenfalls keinen Sinn ergibt. Insgesamt bestätigt sich noch einmal die bereits zuvor aufgestellte Bedingung, dass der abzubildende Gegenstand stets weiter als die Brennweite von der Linse entfernt sein muss.
Abb. 7.22: Ein einfacher Aufbau zur Abbildung des Buchstaben A, der auf eine transparente Folie geschrieben wurde (links). Die Linse der verwendeten Lesebrille ist im Vordergrund zu erkennen. Der Buchstabe kann dann auf einer entfernten Wand vergrößert betrachtet werden (rechts).
Experiment: Abbildung mit Lesebrille Die Abbildungsgleichung für Linsen kann auf einfache Weise mit einer handelsüblichen Lesebrille überprüft werden. Dazu beschriftet man eine transparente Folie und platziert diese zwischen einer hellen Lichtquelle und der Brille. Sobald man den korrekten Abstand zwischen Folie und Linse ge funden hat, lässt sich eine stark vergrößerte Abbildung des Objekts auf einer gegenüberliegenden Wand verkehrt herum betrachten (Abbildung 7.22).
281
7.7 Geometrische Optik |
7.7.4 Linsensysteme Für viele optischen Anwendungen werden nicht nur eine, sondern mehrere Linsen be nötigt, die geschickt miteinander kombiniert werden, um damit beispielsweise Bild fehler zu reduzieren. Auch das menschliche Auge kann als Linsensystem aufgefasst werden, da zunächst eine Brechung an der Hornhaut und anschließend an der elas tischen Augenlinse, deren Brennweite durch Veränderung des Radius angepasst wer den kann, stattfindet. Diese Einstellung auf Nah- und Fernsicht nennt man Akkommo dation. Die Augenlinse ist vollkommen transparent, da sie über keine Nervenbahnen und Blutgefäße verfügt, dass eine nahezu perfekte Abbildung für einen kleinen Seh bereich möglich ist. Um die Brennweite eines Linsensystems berechnen zu können, betrachten wir zwei Linsen mit den Brennweiten f1 und f2 , die im Abstand d zueinander aufgestellt werden. Diese Anordnung ist in Abbildung 7.23 dargestellt. Trifft nun paralleles Licht auf die erste Linse, dann sammelt sich das Licht im Brennpunkt im Abstand f1 zur Lin se. Man spricht hierbei von der Erzeugung eines Zwischenbildes. Für die zweite Linse mit der Brennweite f2 , die anschließend von den Lichtstrahlen getroffen wird, ist die ser Punkt dann gleich der Gegenstandsweite g2 . Für diesen gilt daher die Beziehung: g2 = d − f1
(7.58)
Mithilfe der Abbildungsgleichung ergibt sich für die Bildweite der zweiten Linse: b2 =
g2 f2 g2 − f2
(7.59)
Durch Einsetzen von Gleichung (7.58) erhält man: b2 =
(d − f1 )f2 d − f1 − f2
(7.60)
Man kann nun eine Gesamtbrennweite als f =
g1
g2
b1
f1 f2 f1 + f2 − d
(7.61)
b2
G
B
F1
F2 Bʹ f1
d
f2
Abb. 7.23: Skizze zur Herleitung der Brennweite eines Linsensystems.
282 | 7 Optik
definieren, sodass anschließend das reguläre Abbildungsgesetz für das gesamte Lin sensystem gültig ist. Damit ergibt sich schließlich: 1 d 1 1 + − = f f1 f2 f1 f2
(7.62)
Dies ist ein wichtiger Zusammenhang, der auch für allgemeine Abbildungen gilt und in der Augenheilkunde Verwendung findet, um beispielsweise die Stärke von Brillen gläsern für das menschliche Auge zu berechnen. Betrachtet man die soeben hergeleitete Gleichung genauer, dann stellt man fest, dass sie an die Berechnung des Gesamtwiderstandes von parallel geschalteten elektri schen Widerständen erinnert. In diesem Zusammenhang wurde der Leitwert als rezi proker Widerstand eingeführt, damit die Kehrwerte in der Summe wegfallen. Ein ähn licher Ansatz führt auch bei der oben genannten Gleichung zu einer Vereinfachung. Dazu wird die sogenannte Brechkraft einer Linse als Kehrwert der Brennweite defi niert: D=
1 f
(7.63)
Obwohl die eigentliche Einheit 1/m beziehungsweise m−1 ist, wurde zur Vereinfa chung eine neue Einheit namens Dioptrie (dpt) gewählt, sodass sich 1 dpt = m−1 ergibt. Die Gleichung zur Bestimmung der Gesamtbrechkraft eines Linsensystems berechnet sich dann gemäß Gleichung (7.62) wie folgt: D = D1 + D2 − dD1 D2
,
(7.64)
wobei es sich bei D1 und D2 jeweils um die Brechkraft von Linse 1 und 2 handelt. Oft kann der Linsenabstand d vernachlässigt werden, wobei dann der letzte Term wegfällt und lediglich die Summe der Brechkräfte berücksichtigt werden muss. Bei positivem D1 und D2 sind auch die Brennweiten f1 und f2 positiv. Damit handelt es sich bei der entsprechenden Linse um eine Sammellinse. Ist die Brechkraft hingegen negativ, liegt eine Zerstreuungslinse vor. Die Gesamtbrechkraft des menschlichen Auges liegt bei etwa +60 dpt, was einer Brennweite von ca. 16,6 mm entspricht, wobei die Hornhaut mit etwa +45 dpt den größten Anteil daran hat. Im Falle des menschlichen Auges entsteht Kurz- oder Weitsichtigkeit meistens durch eine zu starke beziehungsweise zu schwache Krümmung der Hornhaut oder durch eine leichte Deformation (Verlängerung oder Verkürzung) des Augapfels. Be findet sich die Netzhaut beispielsweise zu nah an der Linse, wird die Bildweite b klei ner, sodass die Gegenstandsweite aufgrund der Abbildungsgleichung größer werden muss, was letztlich zu Weitsichtigkeit führt, da die Veränderung der Augenlinse nicht ausreicht, um auf näher gelegene Gegenstände zu akkommodieren. Bei vorliegender
7.7 Geometrische Optik | 283
Kurzsichtigkeit befindet sich die Netzhaut dementsprechend weiter weg, sodass b grö ßer wird und damit g kleiner werden muss. Mithilfe von Brillengläsern können diese Arten der Fehlsichtigkeit einfach korrigiert werden. Für die Korrektur von Weitsich tigkeit muss die Brennweite somit verkleinert werden, sodass die Brillengläser eine negative Brechkraft (Zerstreuungslinse) haben müssen. Bei Kurzsichtigkeit benötigt man analog dazu positive Werte für D und somit Sammellinsen.
7.7.5 Spiegel Optische Spiegel werden meistens mit dünnen und sehr glatten Metallschichten er zeugt. Ein ebener Spiegel, wie er beispielsweise häufig in Haushalten verwendet wird, ist eben und besitzt keine Krümmung, d. h., alle Lichtstrahlen, die unter einem be stimmten Winkel auf die Spiegeloberfläche treffen, werden unter demselben Winkel reflektiert. Dies wird häufig mit der Aussage „Einfallswinkel gleich Ausfallswinkel“ beschrieben. Betrachtet man einen Gegenstand durch einen Spiegel, dann sieht man entsprechend das Bild des gespiegelten Gegenstandes hinter dem Spiegel. Das Spie gelbild besitzt dabei denselben Abstand zur Spiegeloberfläche wie der Gegenstand selbst. Neben dem ebenen Spiegel spielen Hohlspiegel in Wissenschaft und Technik ebenfalls eine wichtige Rolle, da sie die Möglichkeit bieten, Gegenstände vergrößert oder verkleinert zu betrachten, wobei meistens sphärische Hohlspiegel verwendet werden. Solche Spiegel funktionieren im Prinzip genauso wie sphärische Linsen und haben ähnliche Abbildungsfehler. Sphärische Spiegel besitzen wie Linsen ebenfalls einen Brennpunkt, der allerdings lediglich für Strahlen, die nahe dem Mittelpunkt verlaufen, einen konstanten Abstand zu diesem besitzt. Ab einem gewissen Abstand zur Symmetrieachse wandert der Brennpunkt allerdings weiter vom Mittelpunkt weg in Richtung der Spiegeloberfläche, was zu einer Verzerrung der Abbildung führt. Mathematisch lässt sich relativ einfach zeigen, dass Linsen und Hochspiegel glei che Abbildungseigenschaften besitzen. Der Vorteil liegt allerdings darin, dass große Hohlspiegel in der Regel einfacher hergestellt werden können als Linsen und somit häufig in Teleskopen zum Einsatz kommen.
s1 s2
M
0
F x f
Abb. 7.24: Skizze zur Berechnung der Krümmung eines para bolischen Hohlspiegels.
284 | 7 Optik
Im Folgenden soll kurz betrachtet werden, wie ein Hohlspiegel beschaffen sein muss, damit alle Lichtstrahlen, die parallel zur optischen Achse des Spiegels verlau fen, in einem Brennpunkt abgebildet werden. Dazu betrachten wir Licht, das wie in Abbildung 7.24 parallel zur horizontal liegenden optischen Achse auf den Spiegel fällt. Außerdem denken wir uns eine vertikale Ebene, die durch den Brennpunkt verläuft. Die Strecke s1 von dieser Ebene bis zum Schnittpunkt mit der Spiegeloberfläche lässt sich dann schreiben als: (7.65) s1 = f − x Die Strecke s2 vom Schnittpunkt zum Brennpunkt ergibt sich dann mit dem Satz des Pythagoras zu: s2 = √(f − x)2 + y2 (7.66) Hierbei ist y der Graph, der den Verlauf der Spiegelform beschreibt. Die Position des Brennpunktes bleibt konstant, wenn die Summe s = s1 + s2 = f − x + √(f − x)2 + y2
(7.67)
konstant ist. Wie man durch Einsetzen leicht nachrechnen kann, ist dies für y = √4fx
(7.68)
der Fall. Das bedeutet, dass die durch die Funktion x=
y2 4f
(7.69)
beschriebene Spiegeloberfläche die Form einer Parabel haben muss. Parabolspiegel werden daher oft für Spiegel- und Radarteleskope eingesetzt, um eine exzellente Ab bildung weit entfernter Objekte zu ermöglichen. Weiterhin werden sie als Reflekto ren für Taschenlampen und Scheinwerfer verwendet, wobei sich das Leuchtmittel im Brennpunkt befindet. Das Licht, das den Strahler anschließend verlässt, ist dann be sonders homogen.
7.7.6 Optische Instrumente 7.7.6.1 Vergrößerung Optische Instrumente werden häufig verwendet, um Objekte stark zu vergrößern (Mi kroskop) oder weit entfernte Objekte detaillierter betrachten zu können (Teleskop). Um dies besser verstehen zu können, definieren wir zunächst den Sehwinkel ε, unter dem ein Objekt der Höhe G im Abstand s vom menschlichen Auge erscheint, über die Beziehung: G tan ε = (7.70) s
7.7 Geometrische Optik | 285
s0
ε0
G Abb. 7.25: Zur Definition des deutlichen Sehwin kels, unter dem ein Gegenstand im Abstand der deutlichen Sehweite s0 abgebildet wird.
Je größer ε bei festem G ist, desto größer erscheint der Gegenstand, d. h., der Wert von s muss möglichst klein gemacht werden. Die maximal mögliche Krümmung der Augenlinse setzt dem allerdings eine natürliche Grenze, die deutliche Sehweite s0 ge nannt wird und bei einem normalsichtigen Menschen etwa 25 cm beträgt. Der zuge hörige Sehwinkel wird dementsprechend mit ε0 bezeichnet. Die Größen s0 und ε0 können über die Skizze in Abbildung 7.25 definiert werden. Im Gegensatz zum bereits betrachteten Abbildungsmaßstab M können wir mithilfe dieses Zusammenhangs die sogenannte Winkelvergrößerung V wie folgt definieren: V=
ε , ε0
(7.71)
wobei ε der Winkel nach der Vergrößerung des Gegenstandes ist. Im Folgenden soll weiterhin die Kleinwinkelnäherung verwendet werden (sin ε = tan ε ≈ ε), womit sich die Winkelvergrößerung zu der Beziehung V=
tan ε tan ε0
(7.72)
umschreiben lässt, was einige der folgenden Betrachtungen vereinfacht. 7.7.6.2 Lupe Das einfachste optische Instrument, das lediglich aus einer Linse besteht, ist die Lu pe. Meistens wird sie so nahe an das zu vergrößernde Objekt herangeführt, dass sich das Objekt genau in der Brennebene der Linse befindet. Das ausgesendete Licht trifft dann nahezu parallel in das menschliche Auge, sodass der Eindruck eines unendlich weit entfernten Gegenstandes entsteht. Durch die vollständige Entspannung der Au genlinse ist ein ermüdungsfreies Betrachten des Objekts möglich. Gemäß Definition ergibt sich die Winkelvergrößerung dann zu: V=
Gs0 tan ε = , tan ε0 Gf
(7.73)
wobei sich die Gegenstandsgröße G herauskürzt. Somit erhält man insgesamt: V=
s0 f
(7.74)
286 | 7 Optik
Daher gilt: Je kleiner die Brennweite f der Lupe ist, desto größer kann das Objekt be trachtet werden. Typische Brennweiten von Lupen liegen in der Größenordnung eini ger Zentimeter, sodass in der Regel Vergrößerungen um den Faktor 10 herum möglich sind. Man kann die Linse auch dichter an das Objekt heranführen. In diesem Fall ist das Licht allerdings nicht mehr parallel und die Augenlinse muss stärker gekrümmt werden, um ein scharfes Bild zu erhalten, was zu einer schnelleren Ermüdung führt. Der zusätzlich erzielbare Gewinn an Vergrößerung liegt hierbei allerdings nur im Be reich einiger Prozent. Man erkennt aus der zuvor hergeleiteten Beziehung, dass starke Vergrößerungen lediglich mit sehr kleinen Brennweiten erzielt werden können. Die ersten Mikroskope bestanden tatsächlich aus einer einzelnen Linse mit Brennweiten von einigen Milli metern. Da die Brennweite einer Linse gemäß Linsengleichung ungefähr ihrem Krüm mungsradius entspricht, waren diese Mikroskope sehr klein und daher für viele An wendungen ungeeignet. 7.7.6.3 Mikroskop Stärkere Vergrößerungen als bei einer Lupe können mit einem Mikroskop erzielt wer den, das aus zwei Linsen im Abstand d zueinander besteht. Die Linse nahe dem Objekt wird Objektiv genannt, wohingegen die Linse nahe dem Auge als Okular bezeichnet wird. Die Objektivlinse erzeugt zunächst, wie im Abschnitt über Linsensysteme be schrieben, ein rein reelles Zwischenbild des zu betrachtenden Objekts zwischen Ob jektiv und Okular. Die Bezeichnung Zwischenbild deutet an, dass das Bild nicht auf einem Schirm sichtbar gemacht wird, sondern anschließend vom Okular zusätzlich vergrößert wird. Die Abbildungsgleichung für das Objektiv lautet: 1 1 1 = + fOb gOb b Ob
(7.75)
Der Abbildungsmaßstab ergibt sich dann zu: b Ob BOb = GOb gOb
(7.76)
Das Zwischenbild soll genau in die Brennebene des Okulars abgebildet werden, so dass dieses wie eine Lupe für das virtuelle Bild verwendet werden kann. Damit gilt für den Sehwinkel analog zur Lupe: tan ε =
GOb BOb = fOk gOb fOb
(7.77)
Zusammen mit dem Sehwinkel ohne Vergrößerung tan ε0 =
GOb s0
(7.78)
ergibt sich dann für die Vergrößerung: V=
b Ob s0 tan ε = tan ε0 gOb fOk
(7.79)
7.7 Geometrische Optik |
287
Da der Abstand d zwischen Okular und Objektiv gleich der Summe aus b Ob und fOk ist und die Gegenstandsweite gOb der Brennweite des Objektivs fOb entspricht, ergibt sich damit für die Gesamtvergrößerung des Mikroskops: V=
(d − fOk )s0 fOb fOk
(7.80)
Wir können jetzt noch die optische Tubuslänge t über t = d − fOk
(7.81)
definieren, was der Differenz zwischen der mechanischen Tubuslänge d und der Oku larbrennweite entspricht. In diesem Fall ergibt sich für die Vergrößerung des Objek tivs: VOb =
t fOb
(7.82)
Die Vergrößerung des Okulars ist weiterhin identisch mit der einer einfachen Lupe: VOk =
s0 fOk
(7.83)
Damit ist die Gesamtvergrößerung gleich dem Produkt der Einzelvergrößerungen von Objektiv und Okular: V = VOk VOb
(7.84)
In beiden Fällen gilt: Je kleiner die Brennweite der einzelnen Linsen, desto stärker ist die Gesamtvergrößerung. Man kann sich daher ein Mikroskop wie eine Hintereinan derschaltung zweier Lupen vorstellen. 7.7.6.4 Teleskop Ein weiteres, in der Wissenschaft und Technik häufig verwendetes Instrument ist das Teleskop. Obwohl das Prinzip des Teleskops schon lange vorher bekannt war, wird heutzutage meistens der nach Johannes Kepler benannte Typ verwendet. Bei diesem Typ werden wie beim Mikroskop zwei Linsen verwendet, deren Abstand hier aller dings exakt der Summe der beiden Brennweiten entspricht. Die Objektivlinse, welche eine sehr große Brennweite besitzen muss, erzeugt zunächst analog zum Mikroskop ein reelles Zwischenbild zwischen beiden Linsen. Wir beschränken uns bei der Her leitung auf Objekte, die verglichen mit der Brennweite sehr weit weg liegen, sodass nahezu paralleles Licht in das Teleskop eindringt. Das Zwischenbild liegt somit in den Brennebenen von Objektiv und Okular. Für den Sehwinkel des Objektivs ergibt sich tan ε0 =
B fOb
(7.85)
288 | 7 Optik
und analog für den Sehwinkel des Okulars: tan ε =
B fOk
(7.86)
Die Gesamtvergrößerung errechnet sich dann entsprechend durch Division der beiden Gleichungen zu: V=
fOb fOk
(7.87)
Dies entspricht dem Verhältnis der Brennweiten von Objektiv und Okular. Gute Tele skope besitzen Objektivlinsen mit Brennweiten einiger Meter. Da das Herstellen gro ßer Spiegel einfacher als die Produktion großer Linsen ist, werden in der Praxis häu fig Newton-Teleskope eingesetzt, deren Funktionsweise allerdings exakt der des Kep ler-Teleskops entspricht. Generell gilt: Je größer die Brennweite des Objektivs und je kleiner die des Okulars ist, desto näher kann das Objekt herangeholt werden. Die At mosphäre setzt der maximalen Vergrößerung allerdings Grenzen, da es bedingt durch thermische Schwankungen ständig Veränderungen im Brechungsindex der darüber liegenden Luftschichten gibt und es somit zu einem Flimmern kommt. Die maximal nützliche Auflösung eines Teleskops im sichtbaren Bereich ist daher deutlich einge schränkt. 7.7.6.5 Abbildungsfehler Abbildungsfehler kommen im Prinzip immer vor und können lediglich durch ge schickt produzierte Optiken so weit wie möglich minimiert werden. Wie bereits er wähnt, ist der Brechungsindex aufgrund von Dispersionseffekten wellenlängenab hängig. Daraus folgt, dass die Brennweite einer Linse ebenfalls nicht konstant ist, sondern eine Funktion der Wellenlänge wird. Die Spektralfarben des Lichts, welche von einem Gegenstandspunkt ausgehen, werden somit nicht mehr auf demselben Punkt abgebildet, was zur sogenannten chromatischen Aberration führt. Hierbei gibt es verschiedene Möglichkeiten zur Verringerung des Effekts. In hochwertigen Kame raobjektiven werden dazu Linsen mit verschiedenen Brechungsindizes zu einem Ge samtsystem so angeordnet, dass die Brennweite für zwei weit auseinanderliegenden Wellenlängen zusammenfällt. Dadurch kann dieser chromatische Fehler weitgehend kompensiert werden. Bei digitalen Bildsensoren wird jede Farbe durch einen eige nen Subpixel detektiert, sodass mithilfe einer geeigneten Skalierung der Farbkanäle ebenfalls eine Reduktion der chromatischen Aberration durchgeführt werden kann. Ein weiterer Linsenfehler, der speziell bei Linsen mit kugelförmiger Oberfläche eine wichtige Rolle spielt, ist die sphärische Aberration. Wie wir bereits gesehen ha ben, ist die Brennweite lediglich für Lichtstrahlen nahe der optischen Achse konstant. Je weiter sich die Strahlen von der Symmetrieachse entfernen, desto näher rückt der Brennpunkt an die Linse heran, da die Strahlen hier stärker gebrochen werden. Die ses Problem kann umgangen werden, indem man die Linse mit einer asphärischen
7.7 Geometrische Optik | 289
Oberfläche herstellt, welche den Fehler kompensiert. Bei Brillengläsern wird hierbei auf verschiedene Verfahren wie Umformungen von sphärischen Linsen oder Model lierung mit Freiformflächen zurückgegriffen. Da kugelförmige Linsen allerdings meis tens einfacher und kostengünstiger geschliffen werden können, werden in Kamera objektiven häufig Linsensysteme verwendet, mit denen man den Fehler durch sphä rische Aberration zumindest minimieren kann. Auch durch den Einsatz von Blenden kann dieser Fehler minimiert werden. Neben den Aberrationen kommt bei sphärischen Linsen noch eine weitere Abbil dungsverzerrung hinzu, die sich Koma nennt. Der Name leitet sich vom griechischen Wort für Haar beziehungsweise Schweif ab. Die Koma entsteht, wenn Licht nicht par allel zur optischen Achse auf die Linse fällt, sondern unter einem bestimmten Winkel, was ebenfalls durch eine Schrägstellung der Linse verursacht werden kann. Tritt nun paralleles Licht in eine schief stehende, sphärische Linse ein, dann liegen die Brenn punkte nicht mehr auf dem Mittenstrahl. Die genaue Position hängt jetzt vielmehr da von ab, ob die Strahlen ober- oder unterhalb des Mittenstrahls eintreffen. Die Schnitt punkte der Strahlen, welche von einem beliebigen Gegenstandspunkt ausgehen, lie gen somit nicht mehr in einer einzigen, sondern stattdessen in mehreren Bildebenen. Dies führt zu einer Verwaschung des Bildes, welche einem Schweif ähnelt, woraus sich letztlich der Name für diese Bildverzerrung entwickelt hat. Reduzieren kann man die Koma genauso wie die sphärische Aberration mit komplizierten Linsensystemen oder mit Blenden, die für die äußerste Randstrahlung undurchlässig sind. Eine vierte und ebenfalls sehr wichtige Verzerrung ist der sogenannte Astigma tismus. Der Begriff leitet sich ebenfalls aus dem Griechischen ab, wobei stigma Punkt bedeutet und die Vorsilbe a- mit „los“ übersetzt werden kann, was deutlich macht, dass es keinen festen Brennpunkt gibt. Astigmatismus entsteht immer dann, wenn ei ne Linse zwei unterschiedliche Krümmungsradien in der vertikalen und horizontalen Ebene besitzt. Ein Extremfall wäre hierbei eine Zylinderlinse mit einer bestimmten Krümmung in einer Ebene und einer unendlich großen Krümmung in der anderen Ebene. Somit entsteht statt eines einzelnen Brennpunktes eine Brennlinie. Dieser Ef fekt kann auch im menschlichen Auge durch eine Hornhautverkrümmung entstehen. Dies führt zu unterschiedlichen Krümmungsradien und somit zu einer in die Länge gezogenen Abbildung von einfallendem Licht auf der Netzhaut, woraus sich der häu fig verwendete Begriff Stabsichtigkeit ableitet. Dieser Fehler kann korrigiert werden, indem man einer Brille neben dem sphärischen Anteil zur Korrektur der Kurz- oder Weitsichtigkeit noch eine zylindrische Krümmung hinzufügt. Auf einem Brillenpass befinden sich daher in der Regel Angaben zur Sphäre (Brechkraft), Zylinder (Korrek tur bei vorliegendem Astigmatismus) und Achse (Position der Pupille). Bei Gleitsicht brillen mit einer kontinuierlichen Veränderung der Brechkraft wird meistens noch ein Wert namens Addition angegeben, die den Wert für die Differenz zwischen maximaler und minimaler Brechkraft enthält.
290 | 7 Optik
7.8 Interferenz 7.8.1 Beugung Stellt man eine Trennwand mit einem schmalen Spalt in einen Glasbehälter und er zeugt dann Wasserwellen, die sich darauf zu bewegen, dann bilden sich hinter dem Spalt kreisförmige Wellenfronten aus. Dieses Phänomen, das auf der linken Seite von Abbildung 7.26 dargestellt ist, lässt sich damit erklären, dass von jeder Wellenfront kugelförmige beziehungsweise bei einer zweidimensionalen Wasseroberfläche kreis förmige huygenssche Elementarwellen ausgehen, die sich alle in jedem Punkt über lagern. Schneidet man nun einen Punkt aus der Wellenfront heraus, so bleibt im Ide alfall eines unendlich dünnen Spaltes lediglich eine Elementarwelle übrig, die sich dann mit derselben Wellenlänge auf der Wasseroberfläche ausbreitet. Wenn man nun, wie auf der rechten Seite von Abbildung 7.26 gezeigt ist, in einem nicht allzu großen Abstand einen weiteren Spalt in die Trennwand einfügt, dann ent stehen zwei Elementarwellen, die sich gegenseitig überlagern und ein sogenanntes Interferenzmuster bilden. Hierbei wurden die Auslenkungen zweier Wellen mit glei cher Amplitude und Wellenlänge zu einem bestimmten Zeitpunkt in jedem Bildpunkt addiert: y(x) = A(sin kr1 + sin kr2 ) , (7.88) wobei r1 und r2 die geometrischen Abstände zum jeweiligen Spalt sind. In einigen Be reichen interferieren die Wellen konstruktiv, sodass man dort ein Intensitätsmaximum erwartet. Diese Bereiche sind hier dunkel dargestellt. An anderen Stellen löschen sich die Wellen aufgrund von Überlagerungen von Wellenbergen und Wellentälern gegen seitig aus, was in der Abbildung als helle Stellen erscheint. Eine weitere wichtige Beobachtung ist, dass die Wasserwellen nun ebenfalls an Stellen gelangen, die vorher unzugänglich waren. Dieses Phänomen wird Beugung ge nannt. Besonders deutlich wird dies bei Schallwellen, die dadurch ebenfalls hinter Hindernissen wie etwa einem Baum wahrnehmbar sind. Da Licht eine elektromagneti
Abb. 7.26: Beugung von Wasserwellen an einem Einzel- und einem Doppelspalt.
7.8 Interferenz | 291
sche Welle ist und somit ebenfalls Überlagerungserscheinungen aufweist, lassen sich diese Beobachtungen mit Wasser und Schall unmittelbar auf die Überlagerung von Lichtwellen übertragen.
7.8.2 Kohärenz Das Wort Kohärenz stammt aus dem Lateinischen und bedeutet übersetzt etwa „Zu sammenhang“. Kohärenz spielt besonders bei der Interferenz von Licht eine wichtige Rolle, da die erzeugten Wellenzüge hier normalerweise recht kurz sind. Diese wer den in der Regel von Atomen ausgesandt, deren Elektronen von höher energetischen in niederenergetischere Schalen herunterfallen, was die kurzzeitige Entstehung ei nes Hertz’schen Dipols zur Folge hat, der elektromagnetische Strahlung aussendet. Die Phasen der dabei entstehenden Wellenzüge, die eine zeitliche Länge von typi scherweise einigen Nanosekunden haben, sind dabei statistisch gleichmäßig ver teilt. Überlagert man diese Wellenzüge, dann ergibt sich ein neuer Wellenzug mit einer zeitlichen Länge, die der Summe der einzelnen Wellenzüge entspricht. Dies wird allgemein als zeitliche Kohärenz bezeichnet. Um Beugungserscheinungen von Licht beobachten zu können, muss die Kohärenzlänge τK des interferierenden Lichts möglichst lang sein, da sonst Lichtwellen mit unterschiedlichen Phasenbeziehungen aufeinandertreffen, was zu einem Verschwinden des Beugungsmusters führt. Multi pliziert man die Kohärenzlänge mit der Lichtgeschwindigkeit, dann erhält man die zugehörige Kohärenzlänge lK = cτK . Laser sind ein Beispiel für Lichtquellen mit sehr großen Kohärenzlängen bis hin zu einigen Metern, wohingegen andere lichterzeu gende Quellen wie Glühbirnen relativ kurze Kohärenzlängen besitzen. Neben dieser betrachteten zeitlichen Kohärenz gibt es auch noch eine räumliche Kohärenz, die sich auf die Phasenunterschiede zwischen verschiedenen Stellen im Raum bezieht. Die zur Ausbreitungsrichtung senkrecht stehende Fläche, in der räum liche Kohärenz vorliegt, wird Kohärenzfläche AK genannt. Multipliziert man nun diese Kohärenzfläche mit der Kohärenzlänge, so erhält man das Kohärenzvolumen: VK = AK lK
(7.89)
Die am Beispiel der Wasserwellen beschriebenen Interferenz- und Beugungserschei nungen können lediglich innerhalb dieses Kohärenzvolumens entstehen. Neben der Verwendung einer kohärenten Lichtquelle gibt es noch weitere Möglichkeiten, das Ko härenzvolumen zu vergrößern. Wenn das Licht beispielsweise zunächst einen dünnen Spalt passiert, dann entstehen hinter dem Spalt huygenssche Elementarwellen, die in gewisser Weise einen Ausschnitt der Welle beinhalten und damit ein relativ großes Ko härenzvolumen besitzen. Je weiter man sich vom Spalt entfernt, desto größer wird das Kohärenzvolumen. Allerdings geht bei dieser Methode sehr viel Licht verloren, wes halb sie sich in der Praxis nur bedingt zur Erzeugung von kohärentem Licht eignet.
292 | 7 Optik
7.8.3 Doppelspalt Analog zum Beispiel mit Wasser betrachten wir nun einen sogenannten optischen Doppelspalt für Lichtwellen. Die Spaltbreite und der Abstand der Spalten müssen hier bei allerdings wesentlich kleiner sein, da Licht eine viel kürzere Wellenlänge als die der Wasserwellen besitzt. Ob sich die Wellen in einem beliebigen Punkt konstruktiv oder destruktiv überlagern, hängt vom sogenannten Gangunterschied ∆s ab, der sich aus der Differenz der zurückgelegten Wegstrecken der Lichtstrahlen ergibt. Ist er 0 oder ein Vielfaches der Wellenlänge, so überlagern sich immer zwei Wellenberge und man erhält konstruktive Interferenz. Hierfür gilt somit die Bedingung: ∆s = nλ ,
n = 0, 1, 2, . . .
(7.90)
Analog dazu liegt eine Auslöschung vor, wenn der Gangunterschied ein ungeradzah liges Vielfaches der halben Wellenlänge beträgt. Demzufolge lässt sich dann für de struktive Interferenz schreiben: ∆s = (2n + 1)
λ , 2
n = 0, 1, 2, . . .
(7.91)
Im Falle eines Doppelspaltes lässt sich ∆s einfach berechnen, wie man auf der linken Seite von Abbildung 7.27 sehen kann. Wenn der Spaltabstand mit d bezeichnet wird und die Intensität unter einem Winkel α gemessen wird, dann erhält man aus Abbil dung 7.27 sofort die Beziehung: ∆s = d sin α
(7.92)
Dementsprechend erhält man für die Winkel mit konstruktiver Interferenz: α = arcsin (
nλ ) d
(7.93)
α d ∆s −60 −30
0
30
60
α (°) Abb. 7.27: Eine Skizze zur Berechnung des Gangunterschiedes beim Doppelspalt mit von links ein fallendem Licht (links) und das Beugungsmuster eines Doppelspaltes für eine bestimmte Wellenlän ge und einen speziellen Spaltabstand (rechts).
7.8 Interferenz |
293
Abb. 7.28: Ein Spektralapparat mit Halterung für einen Doppelspalt oder ein optisches Gitter.
Die Winkel für destruktive Interferenz können analog dazu hergeleitet werden und ergeben sich zu: (2n + 1)λ α = arcsin ( ) (7.94) 2d Man kann das Interferenzmuster entweder mit einem gebogenen Schirm um den Dop pelspalt herum sichtbar machen oder mithilfe eines Spektralapparates, der wie in Ab bildung 7.28 dargestellt im Wesentlichen aus einer Halterung für den Doppelspalt und einer starken Lichtquelle wie einer Quecksilberdampflampe besteht. Zwischen Dop pelspalt und Lampe wird in der Regel noch ein verstellbarer Spalt eingebaut, der so eingestellt wird, dass das eintreffende Licht hinreichend kohärent ist. Das gebeug te Licht kann dann über ein drehbar angebrachtes Okular beobachtet werden, wobei der Winkel meistens mithilfe einer sehr präzisen Skala auf ein Zehntel Grad genau oder besser abgelesen werden kann. Mithilfe optischer Filter, die vor dem Spalt ange bracht werden, kann die Wellenlänge der Lampe auf einen bestimmten Bereich einge schränkt werden. Das Beugungsmuster für einen Doppelspalt mit dem Spaltabstand d = 500 nm, der in diesem Fall exakt der Wellenlänge des gebeugten Lichtes entspre chen soll, ist auf der rechten Seite von Abbildung 7.27 abgebildet. Man erkennt, dass bei der Beugung an einem Doppelspalt in der Mitte immer das Hauptmaximum bezie hungsweise das Maximum 0-ter Ordnung liegt. Die Maxima höherer Ordnung liegen dann jeweils links und rechts daneben. Die Tatsache, dass die Intensität am Rand ab fällt, hängt damit zusammen, dass jeder der beiden Spalte eine endliche Breite hat, d. h., es handelt sich bei dem entstehenden Beugungsmuster um eine Überlagerung eines Einzel- und eines Doppelspaltes. Der Einzelspalt soll daher im folgenden Ab schnitt besprochen werden.
7.8.4 Gitter In professionellen Spektralapparaten zur präzisen Bestimmung von Wellenlängen mit elektronischen Sensoren werden häufig optische Gitter (auch Mehrfachspalte ge nannt) anstelle von einfachen Doppelspalten eingesetzt. Diese bestehen aus einer
294 | 7 Optik
Vielzahl an Spalten, durch die die entstehenden Elementarwellen zur Interferenz gebracht werden können. Man erkennt dabei sofort, dass die Bedingungen für kon struktive und destruktive Interferenz bei Gitter und Doppelspalt identisch sein müs sen. Der Vorteil des optischen Gitters zeigt sich, wenn man kleine Abweichungen vom Gangunterschied für ein Maximum betrachtet. In diesem Fall gibt es immer Teilstrah len von bestimmten Gitteröffnungen, die sich weiterhin gegenseitig auslöschen, was letztlich zu größeren Minima und somit zu schärferen Maxima führt, d. h., je mehr Spalte ein Gitter besitzt, desto schärfer werden die Spektrallinien einer Lichtquelle abgebildet. Dies lässt sich quantitativ wie folgt ausdrücken: Wir betrachten zunächst ein Git ter mit der Gitterkonstante g, die den Abstand zwischen zwei benachbarten Spalten angibt. Für die Lage der Hauptmaxima ergibt sich somit nλ = g sin α
(7.95)
und für die Minima entsprechend:
(2n + 1)
λ = g sin α 2
(7.96)
Dieses Gitter soll zu Beginn aus vier Spalten bestehen. Wenn der Gangunterschied zwi schen dem ersten und dem zweiten Spalt λ beträgt, dann ergibt sich für den ersten und dritten 2λ und den ersten und vierten 3λ, was insgesamt zum Maximum erster Ord nung führt. Beträgt nun der Gangunterschied zwischen dem ersten und zweiten Spalt allerdings λ/4, so wird er zwischen dem ersten und dritten zu λ/2. Dies führt dann zu einer Auslöschung des ersten und dritten Strahls. Dasselbe gilt für den Gangunter schied zwischen dem zweiten und vierten Spalt. Bei N Spalten beträgt der Zuwachs der Minima λ/N. Es gibt damit mehr Bedingungen für die Existenz von Minima zwi schen Maxima, was schließlich zu einer Verbreiterung der Minima führt und dadurch die Maxima schärfer erscheinen lässt. Gleichzeitig gibt es ebenfalls mehr Möglich keiten für die Entstehung von Maxima zwischen zwei benachbarten Hauptmaxima.
−60
−30
0 α (°)
30
60
Abb. 7.29: Intensitätsverlauf hinter ei nem optischen Gitter. Die Nebenminima und -maxima sind zwischen den Haupt maxima deutlich zu erkennen.
7.8 Interferenz |
295
Die Anzahl dieser Nebenmaxima vergrößert sich mit steigender Spaltzahl. Mit dersel ben Überlegung wie zuvor lässt sich zeigen, dass sich die Anzahl der Nebenmaxima zwischen zwei Maxima bei N Spalten zu N − 2 und die Anzahl der Nebenminima zu N − 1 ergibt. Allerdings nimmt die Intensität der Nebenmaxima bei steigender Zahl weiter ab, sodass diese ab einer bestimmten Spaltzahl vollständig vernachlässigbar sind. Dies führt insgesamt zu einer besseren Darstellung der Maxima. Abbildung 7.29 zeigt den Intensitätsverlauf hinter einem optischen Gitter für eine Wellenlänge von 500 nm. Der Spaltabstand der Gitterlinien wurde hierbei auf 2,5 μm festgelegt. Insge samt besitzt das Gitter 5 Spalte, wodurch die 3 deutlich zu erkennenden Nebenmaxima und 4 Nebenminima entstehen. Genau wie beim Doppelspalt fällt auch hier die Inten sität am Rand ab, solange die Spalte eine endliche Breite (in diesem Beispiel 500 nm) besitzen. Quantitativ lässt sich das Auflösungsvermögen des Gitters durch die Bedingung ausdrücken, dass die Lage des n-ten Hauptmaximums für die Wellenlänge λ + ∆λ mit dem benachbarten Minimum nλ + λ/N zusammenfällt. Durch Gleichsetzen dieser bei den Ausdrücke erhält man: ∆λ n(λ + ∆λ) = nλ + (7.97) N Umstellen nach dem Auflösungsvermögen des Gitters λ/∆λ ergibt dann: λ = nN ∆λ
(7.98)
Das Auflösungsvermögen des Gitters erhöht sich folglich mit der Anzahl der überstri chenen Gitterlinien. Dies ist in Abbildung 7.30 am Beispiel eines Gitters in einem Spek tralapparat dargestellt. Die Anzahl der Gitterspalten wurde dabei so gewählt, dass die beiden dicht beieinander liegenden gelben Spektrallinien einer Quecksilberlampe ge rade noch getrennt voneinander wahrnehmbar sind.
Abb. 7.30: Demonstration des Auflösungsvermögen eines Gitters.
296 | 7 Optik Width = 20.00 µm Y Axis [µm] 0
0
2
4
6
8
10
12
14
16
18
20
18.5
2
20.67 8 10
22.84
12 14
Z Fiezo Voltage [V]
Length = 20.00 µm X Axis [µm]
4 6
25.02 16 18 20
27.19
Abb. 7.31: Rasterkraftmikroskop-Aufnahme (AFM) einer CD-ROM und das Beugungsmuster von wei ßem Licht bei der Verwendung als Reflexionsgitter. Die Länge der Erhöhungen und Vertiefung gibt jeweils den Abstand zwischen zwei Bits mit den Zuständen 1 an.
Experiment: Reflexionsgitter Wenn man mit einem Laserpointer, der eine hinreichende Kohärenzlänge besitzt, schräg auf eine CD-ROM hält, dann erkennt man in einem gewissen Abstand mehrere Lichtpunkte auf der Wand. Dies lässt sich damit erklären, dass die CDs einen Spurabstand von einigen Mikrometern besitzen und somit wie ein Reflexionsgitter für einfallendes Licht funktionieren. Verwendet man hingegen weißes Licht, dann erhält man aufgrund der unterschiedlichen Wellenlängen der Lichtfarbe ein auf gefächertes Spektrum mit allen in diesem Licht enthaltenen Spektralfarben (Abbildung 7.31).
7.8.5 Einzelspalt Beim Einzelspalt der Breite b sieht das Interferenzmuster etwas anders als beim Dop pelspalt beziehungsweise beim Gitter aus. In der Mitte erscheint weiterhin ein Maxi mum, wie man in einer Abbildung auf einem Schirm sofort erkennen kann. Um die Lage der Minima und weiteren Maxima bestimmen zu können, teilt man das gesamte
α
b
λ/2 λ
−60 −30
0 α (°)
30
60
Abb. 7.32: Der Gangunterschied zwischen zwei Teilbündeln für das erste Minimum (links) und das Beugungsmuster an einem Einzelspalt für eine willkürlich gewählte Wellenlänge und Spaltbreite (rechts).
7.8 Interferenz | 297
Lichtbündel hinter dem Spalt für das n-te Minimum in n + 1 Teilbündel auf. Zunächst betrachten wir das Resultat für n = 1, das auf der linken Seite in Abbildung 7.32 darge stellt wird. In diesem Fall liegt zwischen beiden äußersten Randstrahlen konstruktive Interferenz vor, da der Gangunterschied zwischen diesen beiden Strahlen exakt einer Wellenlänge entspricht. Der obere Randstrahl löscht sich dann allerdings aufgrund des Gangunterschiedes einer halben Wellenlänge mit dem mittleren Strahl aus. Auf diese Weise lässt sich zu jedem Strahl aus dem oberen Bündel ein weiterer Strahl aus dem unteren Bündel finden, der mit diesem destruktiv interferiert, sodass sich unter diesem Winkel insgesamt ein Minimum ergibt. Wenn man analog dazu ebenfalls grö ßere n betrachtet, dann stellt man fest, dass sich diese Bedingung auf alle Minima übertragen lässt. Somit ergibt sich als Bedingung für die Minima dieselbe Formel, die beim Doppelspalt die Lage der Maxima beschreibt, wobei allerdings der Spaltabstand durch die Breite des Einzelspaltes ersetzt werden muss: nλ = b sin α
(7.99)
Völlig analog dazu lässt sich außerdem die Lage der Maxima beschreiben. Auch hier bei betrachtet man zunächst die Auslöschung der Randstrahlen, was zu einer kon struktiven Interferenz der Teilbündel führt. Damit ergibt sich für die Maxima eine Be dingung, die exakt der Lage der Minima beim Doppelspalt entspricht: (2n + 1)
λ = b sin α 2
(7.100)
Daher ist es ratsam, sich die Formeln lediglich für einen der beiden Fälle einzuprä gen und diese dann auf jeweils auf den Einzel- oder Doppelspalt zu übertragen. Das vollständige Beugungsmuster für eine beliebig gewählte Spaltbreite und Wellenlän ge ist auf der rechten Seite in Abbildung 7.32 dargestellt. Hier wird deutlich, dass das Maximum nullter Ordnung verglichen mit einem Doppelspalt oder Gitter die doppelte Breite besitzt. Abbildung 7.33 zeigt das aufgenommene Beugungsmuster eines varia blen Spaltes für zwei verschiedene Spaltbreiten mithilfe eines Spektralapparates. Als Lichtquelle wurde eine Quecksilberdampflampe in Kombination mit einem Gelbfilter verwendet.
Abb. 7.33: Aufnahmen des Beugungsmusters eines Ein zelspaltes für zwei verschiede ne Spaltöffnungen.
298 | 7 Optik
7.8.6 Auflösungsvermögen Die für den Einzelspalt betrachteten Ergebnisse treffen nicht ausschließlich auf einen eindimensionalen Spalt zu, sondern können ebenfalls auf andere Formen übertragen werden. Bei optischen Instrumenten wie einem Mikroskop oder Teleskop muss dazu der Durchmesser der Eintrittsöffnung betrachtet werden. Die Beugung des eintreten den Lichts an der Öffnung führt zu scheibenförmigen Beugungsmustern an der Objek tivlinse, welche wiederum die maximale Auflösung des Mikroskops begrenzen. Dieser limitierende Faktor für die maximale Auflösung soll nun am Beispiel eines Mikroskop objektivs besprochen werden. Die relevanten Größen, die für die folgende Herleitung besprochen werden, sind in Abbildung 7.34 zu finden. Für das erste Maximum ergibt sich aus den Betrachtungen des Einzelspaltes folgender Zusammenhang: D sin ϕ =
3 λ 2
(7.101)
Die Spaltbreite b wurde hierbei durch den Durchmesser D ersetzt. Eine genauere Be trachtung für Kreisblenden zeigt, dass anstelle des Faktors 3/2 der Faktor 1,22 verwen det werden muss, um genauere Ergebnisse zu erzielen. Im Folgenden soll dieser Faktor allerdings der Einfachheit halber weggelassen werden. Verwendet man nun die Klein winkelnäherung, so erhält man für den Winkel ϕ des gebeugten Lichts: ϕ= f
λ D
(7.102)
a
d D 2α 2r
Abb. 7.34: Skizze zur Herleitung des Auflösungsvermögens eines optischen Instruments. Die beiden Ellipsen repräsentieren die durch Interferenz entstehenden Beugungsscheiben.
7.8 Interferenz |
299
Die Beugungsscheiben im Abstand a vom Objektiv besitzen dann den Radius r, der sich ebenfalls unter der Verwendung von sin ϕ ≈ ϕ wie folgt berechnen lässt: r=
aλ D
(7.103)
Damit zwei Punkte im Abstand d auf einem Objekt gerade noch getrennt wahrgenom men werden können, darf der Abstand zwischen ihnen nicht kleiner als 2r sein, also der doppelte Radius der Beugungsscheiben. Geht man nun davon aus, dass der Gegen stand näherungsweise im Brennpunkt des Objektivs liegt, dann gilt die Beziehung d f = 2r a
(7.104)
beziehungsweise durch Umformen nach d: d=
fλ λ = D/2 sin α
(7.105)
Hierbei ist α der halbe Öffnungswinkel des Objektivs. Oft befinden sich zwischen Ob jekt und Objektiv noch Flüssigkeiten wie Glycerin oder Wasser mit dem Brechungsin dex n, wodurch sich die optische Weglänge vergrößert. Damit erhält man schließlich: d=
λ n sin α
(7.106)
Je kleiner der Wert von d ist, desto besser ist das Auflösungsvermögen. Das Produkt aus n und sin α wird numerische Apertur genannt und ist somit ein Maß für die maximal erreichbare Auflösung. Selbst bei Verwendung eines Objektivs mit einer unendlichfa chen Vergrößerung wäre die maximale Vergrößerung durch Beugung begrenzt. Eine perfekte Auflösung mit d = 0 kann lediglich mit unendlich großen Linsen realisiert werden und ist somit nicht umsetzbar. Allerdings erreicht ein gutes Objektiv in der Praxis eine numerische Apertur von etwa 0,95, was bereits ein sehr guter Wert ist. Ge nerell lässt sich damit sagen, dass keine Strukturen mehr aufgelöst werden können, die deutlich kleiner als die Wellenlänge des verwendeten Lichts sind, d. h., je kürzer die Wellenlänge ist, desto feiner sind die Strukturen, die man auflösen kann. Licht mikroskope sind daher erst ab Objektgrößen von einigen Mikrometern praktikabel. Im nächsten Kapitel wird allerdings gezeigt, dass die Wellenlänge von Materiewellen viel kürzer ist als die von sichtbarem Licht, wodurch unter Hinnahme einiger Nach teile enorme Vergrößerungen erzielt werden können. Für sehr starke Vergrößerungen werden daher Elektronenmikroskope eingesetzt.
7.8.7 Dünne Schichten Beugungseffekte treten nicht nur an Spalten und Gittern auf, sondern auch an sehr dünnen Schichten. Beispiele hierfür sind die dünnen Häute von Seifenblasen oder
300 | 7 Optik
s3
α
α a β
s1 b
s2
n
d
Abb. 7.35: Skizze zur Herleitung des Gangunter schiedes an dünnen Schichten.
eine Schicht von ausgelaufenem Motoröl, die im Sonnenlicht in verschiedenen Far ben schimmert. Der Grund hierfür liegt in der Interferenz von reflektiertem Licht an beiden Seiten der dünnen Schicht. Dies soll nun quantitativ genauer untersucht wer den. Obwohl die Herleitung einige Zeilen Schreibarbeit erfordert, basiert sie dennoch auf einfachen geometrischen und algebraischen Umformungen und soll zum besse ren Verständnis komplett nachvollzogen werden. Die entsprechende Skizze mit allen relevanten Größen ist in Abbildung 7.35 zu sehen. Wir beschreiben zunächst den Verlauf eines Lichtstrahls, der unter dem Winkel α gegen die Oberflächennormale auf die dünne Schicht trifft. Der reflektierte Strahl be sitzt aufgrund des Reflexionsgesetzes weiterhin den Winkel α zum Lot, wohingegen der gebrochene Strahl unter dem Winkel β in das Medium eintritt. Der gesamte Gang unterschied ist nun die Differenz der Summe der optischen Weglängen außerhalb und innerhalb der Schicht: ∆s = n2 (s2 + s1 ) − n1 s3 , (7.107) wobei der Brechungsindex n1 von Luft gleich 1 gesetzt und n2 durch n ersetzt werden kann: (7.108) ∆s = n(s2 + s1 ) − s3 Außerdem gilt, dass die beiden Strecken innerhalb des Mediums gleich lang sein müs sen: d s1 + s2 = (7.109) cos β Für die Strecke des reflektierten Lichts ergibt sich hingegen: s3 = a sin α
(7.110)
Die Strecke a ist weiterhin doppelt so lang wie b, was zu folgendem Zusammenhang führt: a = b = d tan β (7.111) 2 Das Einsetzen der bisher betrachteten Beziehungen ergibt damit für den gesamten Gangunterschied: n ∆s = 2d ( − sin α tan β) (7.112) cos β
7.8 Interferenz |
301
Die Anwendung der Definition des Tangens führt zu folgender Relation: 2d (n − sin α sin β) cos β
∆s =
(7.113)
Um β zu eliminieren, bietet sich weiterhin das Snellius’sche Brechungsgesetz an: sin β =
1 sin α n
(7.114)
Außerdem benötigt man noch die stets gültige Beziehung (Additionstheorem) sin2 β + cos2 β = 1 ,
(7.115)
um den Kosinus von β zu eliminieren: cos β = √1 − sin2 β
(7.116)
Dies führt dann zu cos β = √1 −
1 1 sin2 α = √n2 − sin2 α , 2 n n
(7.117)
wobei im letzten Schritt der Kehrwert von n vor die Wurzel gezogen wurde. Setzt man nun alle hergeleiteten Beziehungen in den Gangunterschied, so ergibt sich: ∆s =
2dn √n2 − sin α 2
(n −
1 sin2 α) , n
(7.118)
was noch einmal durch Kürzen zu folgender einfachen Gleichung umgeformt werden kann: ∆s = 2d√n2 − sin2 α (7.119) Zur Bestimmung der Minima und Maxima muss noch berücksichtigt werden, dass das reflektierte Licht auf der Oberseite der dünnen Schicht einen Phasensprung von π macht, wie bei den mechanischen Wellen an festen Enden bereits gezeigt wurde. Dies führt zu einer weiteren Verschiebung um eine halbe Wellenlänge, wodurch sich dann als Bedingung für destruktive Interferenz die Formel kλ = 2d√n2 − sin2 α
(7.120)
ergibt. Für konstruktive Interferenz erhält man dann analog dazu: (k + 1)
λ = 2d√n2 − sin2 α 2
In beiden Fällen ist k eine positive ganze Zahl.
(7.121)
302 | 7 Optik
Solche dünnen Schichten werden in der Optik oft verwendet, um beispielsweise Brillengläser zu entspiegeln. Um allerdings ein breites Wellenlängenspektrum abzu decken und die destruktive Interferenz weitgehend unabhängig vom Winkel zu ma chen, verwendet man dabei häufig mehrere Schichten, die übereinander aufgebracht werden. Computergestützte Berechnungen geben dabei die exakte Dicke und Zusam mensetzung der Schichten an, sodass professionelle Brillen und Objektive nahezu kei ne Reflexionen des Sonnenlichts mehr aufweisen. Eine weitere Anwendung liegt in der Oberflächenprüfung von Linsen. Legt man diese auf eine dünne Glasplatte, dass sich zwischen Linse und Platte ein dünner Luftspalt bildet, dann kann dieser Luftkeil als dünne Schicht angesehen werden, was zur Interferenz von senkrecht zur Linse ein fallendem Licht führt. Es bilden sich dann kreisförmige Newtonringe, deren Abstände zueinander die Oberfläche der Linse bis auf die Größenordnung von einigen Wellen längen genau vermessen lassen.
7.9 Extinktion Neben der Brechung von Licht führen die erzwungenen Dipolschwingungen der Elek tronen in einem Material ebenfalls zur Absorption von Licht. Dabei ist zu beobachten, dass umso mehr Licht absorbiert wird, je größer die ursprüngliche Intensität I0 ist. Im Folgenden soll die Absorption von Licht beim Durchgang durch ein mit einer Flüssig keit gefülltes Gefäß betrachtet werden, in welchem ein Stoff mit der Konzentration c gelöst wurde. Experimentell kann man eine Proportionalität zwischen der Redukti on dI und der Intensität I0 sowie der Konzentration des gelösten Stoffes feststellen. Damit erhält man die Gleichung dI = −μIc dx ,
(7.122)
in welcher die Proportionalitätskonstante μ üblicherweise als Abschwächungskoeffi zient bezeichnet wird. Dividiert man diese Gleichung durch dx, dann ergibt sich fol gende Differenzialgleichung: dI = −μcI (7.123) dx Als Lösung kann deshalb einfach eine Exponentialfunktion verwendet werden. Man erhält damit folgende Beziehung für die Abschwächung des Lichts in Materie: I(x) = I0 e−μcx
(7.124)
Diese wird in der Literatur häufig Beer-Lambert-Gesetz genannt. In der Praxis verwen det man hingegen nicht den natürlichen Logarithmus ln, sondern stattdessen den so genannten Extinktionskoeffizienten ε, der über den Logarithmus lg zur Basis 10 defi
7.9 Extinktion
| 303
niert ist. Damit erhält man: lg (
I ) = εcl I0
(7.125)
Molarer Extinktionskoeffizient [l/mol/cm]
Hierbei bezeichnet l die Länge des Gefäßes, durch das das Licht hindurch propagiert. Ein wichtiges Verfahren in der Medizin, das das Absorptionsgesetz benutzt, ist die Pulsoxymetrie, die zur Bestimmung des Sauerstoffgehaltes in Blut verwendet wird. Hierbei wird ein kleines Gerät in Form eines Clips mit LEDs und einer Fotodiode bei spielsweise am Finger des Patienten angebracht. Anschließend wird die Absorption für die beiden Wellenlängen 660 und etwa 910 nm gemessen. Der Grund hierfür ist in Abbildung 7.36 zu finden, in der der molare Extinktionskoeffizient von oxygeniertem (sauerstoffreich) und desoxygeniertem (sauerstoffarm) Hämoglobin gegen die zugehö rige Wellenlänge abgebildet ist. Desoxygeniertes Hämoglobin hat bei kleinen Wellen längen unter 800 nm einen höheren Extinktionskoeffizienten als solches mit gebun denem Sauerstoff. Für größere Wellenlängen kehrt sich das Verhältnis um. Die beiden LEDs scheinen jeweils abwechselnd für eine bestimmte Zeitdauer durch den Finger oder eine andere exponierte Körperregion, bevor das Licht von der Fotodiode nach der Absorption registriert wird. Die Ergebnisse aus beiden Messungen werden jeweils intern mit den Daten einer elektronisch hinterlegten Tabelle verglichen und erlauben damit die Messung der prozentualen Sauerstoffsättigung im Blut. 107 Oxygenierten Hämoglobin Desoxygenierten Hämoglobin
106 105
Messung
104 103 102 400
600 800 Wellenlänge [nm]
1.000
Abb. 7.36: Molarer Extinktionskoeffizient von oxygeniertem Hämoglobin und desoxygeniertem Hä moglobin. Die beiden typischen Wellenlängen zur Messung der Absorption bei der Pulsoxymetrie sind durch vertikale Linien gekennzeichnet.
304 | 7 Optik
7.10 Zusammenfassung Da das Auge und die damit verbundene optische Wahrnehmung in der Medizin eine wichtige Rolle spielen, wird zu Beginn dieses Kapitels auf dessen Aufbau eingegan gen. Anschließend wird das zuvor entwickelte Modell von Licht als elektromagneti sche Welle auf das Phänomen der Brechung in einem transparenten Medium übertra gen. Auch in diesem Abschnitt werden wieder technische und medizinische Aspekte hervorgehoben. Eine weitere wichtige Eigenschaft von Lichtwellen ist die Fähigkeit der Polarisation und der spektralen Zerlegung von farbigem Licht mithilfe der Disper sion. Vernachlässigt man den Wellencharakter von Licht aufgrund der Größenordnun gen der betrachteten Objekte, lassen sich Linsen und deren Anwendungen in opti schen Apparaten lediglich unter Anwendung geometrischer Gesichtspunkte mathe matisch beschreiben. Dazu wird zunächst die Brennweite von gekrümmten Flächen bestimmt und anschließend werden die Ergebnisse auf Linsensysteme wie Mikrosko pe oder Teleskope übertragen. Beide Apparate besitzen ein breites Anwendungsspek trum in der Wissenschaft und Technik. Besonders das Mikroskop ist aus dem medi zinischen Alltag nicht mehr wegzudenken. Unter Berücksichtigung der Welleneigen schaften von Licht wird im folgenden Abschnitt der Aspekt der Interferenz genauer betrachtet, der sich bei der Beugung von Licht an Hindernissen bemerkbar macht. Im Speziellen wird hierbei auf die maximal erreichbare Auflösung von optischen Appara ten eingegangen, die besonders bei Lichtmikroskopen eine wichtige Rolle spielt. Zum Schluss wird noch das Beer-Lambert-Gesetz hergeleitet, mit dessen Hilfe der Extink tionskoeffizient eines Stoffes definiert werden kann, und dies an einem medizinischen Anwendungsbeispiel analysiert.
Aufgaben Aufg. 7.1: Ein Lichtstrahl tritt unter einem Winkel von 20° gegen das Lot der Oberflä che von Luft in Wasser ein. Unter welchem Winkel pflanzt er sich im Wasser fort? Aufg. 7.2: Ein Taucher in einem Schwimmbad befindet sich unterhalb der Wasserober fläche. Ab welchem Winkel kann er nicht mehr aus dem Becken herausschauen, son dern lediglich eine Reflexion der Bodenfliesen beobachten? Aufg. 7.3: Linear polarisiertes Licht trifft auf einen Polarisator, der um 20° gegenüber der Polarisationsebene gedreht ist. Auf welchen Wert fällt die Intensität ab? Aufg. 7.4: Eine Glucoselösung mit einem Drehwinkel von +52,7° cm3 dm−1 g−1 und einer Konzentration von 10 g/l befindet sich einer Küvette der Länge 30 cm. Um wel chen Winkel wird polarisiertes Licht dabei nach rechts gedreht?
Aufgaben |
305
Aufg. 7.5: Zirkular polarisiertes Sonnenlicht fällt unter einem Winkel von 70° gegen das Lot auf eine ruhige Wasseroberfläche. Wie viel Prozent des Lichts wird dabei re flektiert, wenn der mittlere Brechungsindex 1,33 beträgt? Aufg. 7.6: Eine Lochkamera besitze ein Loch mit dem Durchmesser 1 mm. Eine Person mit der Größe 1,70 m soll damit auf einer fotografischen Platte der Höhe 10 cm abge bildet werden. Der Abstand zwischen Loch und Fotoplatte betrage 25 cm. a) Wie weit muss der Mensch entfernt sein, damit er eben noch auf die Platte passt? b) Wie groß ist dann die Kreisscheibe, die von jedem Punkt des Menschen erzeugt wird? Aufg. 7.7: Eine aus Quarzglas geschliffene bikonvexe und dünne Linse mit den beiden identischen Radien 3 cm und dem Brechungsindex 1,47 wird für ein optisches Instru ment gefertigt. Welche Brennweite besitzt diese Linse nach ihrer Herstellung? Aufg. 7.8: Das Objektiv eines Fotoapparats habe eine Brennweite von 50 mm. Der ab zubildende Gegenstand ist eine Person mit einer Höhe von 1,70 m, die sich 5 m vom Fotografen entfernt befindet. a) Wie groß muss der Abstand zwischen Objektiv und Film sein, damit das Bild scharf abgebildet wird? b) Wie groß erscheint die Person auf dem Film? Aufg. 7.9: Zwei Linsen mit den Brennweiten 10 cm und 20 cm werden in einem Ab stand von 5 cm zu einem Linsensystem verbunden. Wie groß ist die resultierende Ge samtbrechkraft? Aufg. 7.10: Die Linse einer Botanikerlupe habe eine Brennweite von 2,5 cm. Welche Vergrößerung kann damit erzielt werden? Aufg. 7.11: Das Objektiv eines Mikroskops habe eine Brennweite von 0,3 cm. Der Ab stand zum Okular mit der Brennweite 1 cm betrage 10 cm. Welche Gesamtvergröße rung ergibt sich daraus für dieses Mikroskop? Aufg. 7.12: Das Objektiv eines Teleskops habe eine Brennweite von 5 m, wohingegen das Okular eine Brennweite von 5 cm besitzt. Welche Vergrößerung kann damit er reicht werden? Aufg. 7.13: Die grüne Spektrallinie einer Quecksilberdampflampe hat eine Wellenlän ge von 546,07 nm. Unter welchem Winkel kann das Maximum erster Ordnung beob achtet werden, wenn der Spaltabstand 2 μm beträgt? Aufg. 7.14: Die beiden gelben Spektrallinien einer Quecksilberdampflampe liegen bei 576,96 nm und 579,07 nm. Wie viele Spalte muss ein optisches Gitter mindestens be sitzen, damit diese beiden Linien gerade noch scharf getrennt werden können? Aufg. 7.15: Licht mit der Wellenlänge 550 nm trifft auf einen Spalt der Breite 2,5 μm. Unter welchem Winkel wird das erste Minimum gemessen?
306 | 7 Optik Aufg. 7.16: Das Objektiv eines Mikroskops habe einen halben Öffnungswinkel von 50° und zwischen Objekt und Objektiv befindet sich keine weitere Flüssigkeit. Wie groß ist das Auflösungsvermögen dieses Objektivs für sichtbares Licht mit einer mittleren Wellenlänge von 550 nm? Aufg. 7.17: Auf einer Pfütze hat sich eine Ölschicht (Brechungsindex 1,5) mit einer Di cke von 500 nm gebildet. Wie groß ist der einzige Winkel, unter dem man rotes Licht mit einer Wellenlänge von 700 nm beobachten kann? Aufg. 7.18: Bei Männern liegt die molare Hämoglobinkonzentration bei etwa 10 mmol/l. Der Extinktionskoeffizient von oxygeniertem Hämoglobin beträgt etwa 290 l/mol/cm bei einer Wellenlänge von 700 nm. Um wie viel Prozent nimmt die In tensität von Licht bei dieser Wellenlänge nach dem Durchlaufen einer Strecke von 1 mm theoretisch etwa ab, wenn das gesamte Hämoglobin Sauerstoff gebunden hat?
8 Atom- & Kernphysik 8.1 Übersicht In der modernen Physik, die sich speziell mit subatomaren Prozessen befasst, müs sen viele bekannte Gesetzmäßigkeiten der klassischen Mechanik abgeändert werden. So besitzt Licht nicht ausschließlich Welleneigenschaften, sondern muss im Rahmen des Welle-Teilchen-Dualismus ebenfalls gleichzeitig als Welle und Teilchen aufgefasst werden. Die daraus resultierenden Eigenschaften werden im Abschnitt über Quanten physik in Bezug auf den fotoelektrischen Effekt und das plancksche Strahlungsgesetz ausführlich behandelt. Weiterhin wird deutlich werden, dass auch Teilchen Wellenei genschaften besitzen und mithilfe von Quantenzahlen beschrieben werden können. Dies führt unmittelbar zu den Anfängen der Atomphysik mit dem Bohr’schen Atom modell und der Weiterentwicklung hin zum Orbitalmodell. Anschließend werden die Gesetze der Kernphysik beschrieben, die aufgrund der kleineren Maßstäbe deutlich komplexer sind als die Vorgänge der Elektronenhülle. Die Berechnung der Bindungs energie von Nukleonen führt dann zu den radioaktiven Zerfällen und künstlich er zeugter Röntgenstrahlung. Hierbei werden auch viele technische und medizinische Anwendungsfelder beleuchtet. Daraus leiten sich dann die Grundlagen des Strahlen schutzes ab, die am Ende des Kapitels zusammengefasst werden sollen.
8.2 Geschichte Bereits vor vielen Jahrhunderten haben sich die Menschen gefragt, ob Materie immer weiter teilbar ist oder ob es kleinste Einheiten geben muss, aus der alles in der Welt aufgebaut ist. Der griechische Philosoph Demokrit führte bereits im vierten Jahrhun dert vor Christus den Begriff atomos ein, was übersetzt etwa das Unteilbare bedeutet. Diese Idee wurde allerdings bis zum 18. beziehungsweise 19. Jahrhundert nicht wei terverfolgt. Der Naturforscher John Dalton fand 1808 schließlich heraus, dass das Ver hältnis der Massen zweier Elemente, die chemisch miteinander reagieren, kleine gan ze Zahlen ergibt. Diese Gesetzmäßigkeit ist heute als das Gesetz der multiplen Propor tionen bekannt. So können zum Beispiel 32 g Schwefel mit 48 g Sauerstoff reagieren und ein Massenverhältnis von 2:3 erzeugen. Daraus lässt sich ableiten, dass es Grund stoffe (Elemente) geben muss, die aus kleinen Bausteinen (Atome) aufgebaut sind. Im Jahr 1897 war es dem Physiker Joseph John Thomson möglich, Kathodenstrahlen mit einer Glühkathode und einem starken elektrischen Feld zu erzeugen. Er erkann te, dass hierbei Teilchen aus der Glühkathode ausgedampft werden, die sowohl eine Masse als auch eine Ladung haben. Damit entdeckte er das Elektron. Thomson vermu tete, dass sich die Elektronen bereits in den Atomen des Kathodenmaterials befinden müssen, und entwickelte daraufhin das nach ihm benannte Thomson’sche Rosinen https://doi.org/10.1515/9783110692921-008
308 | 8 Atom- & Kernphysik
kuchenmodell des Atoms. Nach diesem Modell befinden sich die Elektronen in einem „Kuchen“ aus positiv geladener Materie und bilden mit diesem ein Atom. Diese The se wurde allerdings bereits 1909 durch Ernest Rutherford widerlegt. Er beschoss eine dünne Goldfolie mit geladenen Teilchen und konnte durch Messen des Ablenkwin kels zeigen, dass in einem Atom die gesamte positiv geladene Materie in einem kleinen Kern vereinigt sein muss. Dieses Atommodell ist im Prinzip noch bis heute gültig. Noch bevor Rutherford seine bekannten Streuversuche durchgeführt hat, konnte er durch Untersuchungen von radioaktiven Zerfällen die Existenz von Protonen nachweisen. Er vermutete daher, dass der Kern eines Atoms aus Protonen besteht, welche von ne gativ geladenen Elektronen umgeben sind. Ein Schüler Rutherfords, James Chadwick, hatte im Jahr 1932 schließlich festgestellt, dass es neben Protonen ebenfalls neutrale Teilchen im Atomkern geben muss, die er Neutronen nannte. Zunächst glaubte man, dass ein Neutron aus einem Elektron und einem Proton besteht, wodurch sich beide Ladungen gegenseitig kompensieren. Diese These stellte sich allerdings um 1940 her um als falsch heraus. Heute weiß man durch Streuversuche mit hochenergetischen Teilchen, dass auch Protonen und Neutronen nicht elementar sind, sondern aus noch kleineren Teilchen namens Quarks bestehen. Diese besitzen drittelzahlige Ladungen und können niemals alleine existieren, sondern lediglich im Verbund von zwei oder mehr Quarks auftreten. Sowohl das Proton als auch das Neutron bestehen jeweils aus drei Quarks. Bei Quarks und Elektronen hingegen konnte bis heute keine weitere Sub struktur mehr nachgewiesen werden. Diese Teilchen gelten somit als elementare Bau steine des Universums.
8.3 Quantenphysik 8.3.1 Strahlungsgesetze Die ersten Hinweise auf eine Quantisierung von elektromagnetischen Wellen fand Max Planck, als er das nach ihm benannte plancksche Strahlungsgesetz formuliert hat. Historisch betrachtet handelt es sich um eine Weiterentwicklung des RayleighJeans-Gesetzes, das die Intensität der abgestrahlten Leistung eines schwarzen Körpers in Abhängigkeit der Frequenz oder der Wellenlänge beschreibt. Die Herleitung die ses Gesetzes soll an dieser Stelle kurz skizziert werden: Wir gehen zunächst von der Wellengleichung für das elektrische Feld in drei Dimensionen aus: 1 ∂E ∂2 E ∂2 E ∂2 E + + = 2 ∂x2 ∂y2 ∂z2 c ∂t
(8.1)
Für jede Raumrichtung in einem kubischen, schwarzen Körper mit der Seitenlänge L muss die Bedingung einer stehenden Welle erfüllt sein und der Feldvektor an den Wänden verschwinden. Dies führt zu folgender Lösung der Wellengleichung: n1 πx n2 πy n3 πz sin sin (8.2) E = E0 sin L L L
8.3 Quantenphysik | 309
Die Konstanten n i werden Moden genannt. Setzt man diese von x, y und z abhängige Funktion in die Wellengleichung ein, so ergibt sich als Bedingung für die Moden: (
n2 π 2 n3 π 2 2π 2 n1 π 2 ) +( ) +( ) =( ) L L L λ
(8.3)
Multipliziert man diese Gleichung mit L und dividiert anschließend durch π, so erhält man folgende Vereinfachung: n21 + n22 + n23 =
4L2 λ2
(8.4)
Im nächsten Schritt muss herausgefunden werden, für welche n i diese Bedingung er füllt ist. Dazu betrachtet man als Vereinfachung die Anzahl an möglichen Kombinatio nen auf einem dreidimensionalen Gitter einer Kugel. Das Volumen aller n i berechnet sich dann mit dem Radius (8.5) R = √n21 + n22 + n23 gemäß 3 4 3 4 (8.6) πR = π (n21 + n22 + n23 ) 2 3 3 Da die n i allerdings nur positive Werte annehmen können, darf lediglich 1/8 der ge samten Kugel betrachtet werden. Aufgrund der zwei unterschiedlichen Polarisations richtungen elektromagnetischer Wellen muss außerdem noch ein Faktor 2 hinzuge fügt werden. Dies führt schließlich unter Verwendung von Gleichung (8.4) zu folgen dem Ergebnis für die Anzahl aller Moden:
V=
N=
2 8πL3 V= 8 3λ3
(8.7)
Nun betrachten wir die Anzahl der Moden pro Wellenlänge, also die Ableitung von N nach λ: dN 8πL3 (8.8) =− 4 dλ λ Dies wird häufig auch als Modendichte bezeichnet. Wenn wir nun von einem unend lich großen Volumen ausgehen, dann interessiert uns vielmehr die Modendichte pro Volumen, wobei wir hier wieder die Näherung eines kubischen Volumens verwenden: 1 dN 8π =− 4 3 L dλ λ
(8.9)
Aufgrund der Energieerhaltung und des Gleichverteilungssatzes muss jede Mode die mittlere Energie k B T besitzen: du 1 dN 1 dE = = −k B T 3 dλ L3 dλ L dλ
(8.10)
Hierbei bezeichnet u die Energiedichte der einzelnen Moden. Einsetzen von dN/dλ in die Gleichung liefert dann: du 8πk B T (8.11) = dλ λ4
310 | 8 Atom- & Kernphysik
Die abgestrahlte Leistung pro Wellenlänge lässt sich berechnen, indem man die Ener giedichte pro Wellenlänge du/dλ halbiert und mit dem Volumen pro Zeiteinheit mul tipliziert: 1 du Ax 1 du = Ac (8.12) p= 2 dλ t 2 dλ Im letzten Schritt wurde die Strecke x durch das Produkt ct ersetzt, sodass die Zeit gekürzt werden kann. Die Strahlungsleistung ist außerdem nicht in alle Richtungen gleich groß, sondern variiert mit dem Kosinus des Polarwinkels θ. Mittelt man über alle Winkel, so erhält man die spektrale spezifische Ausstrahlung B aus dem Quotienten der gemittelten Strahlungsleistung dividiert durch die ausstrahlende Fläche: M(λ) =
p̄ du c = A dλ 4
(8.13)
Jetzt muss lediglich noch Gleichung (8.11) eingesetzt werden und man erhält nach ei ner entsprechenden Vereinfachung das sogenannte Rayleigh-Jeans-Gesetz: M(λ) =
2cπ kB T λ4
(8.14)
Dieses kann theoretisch dazu benutzt werden, die spektrale spezifische Ausstrahlung eines schwarzen Körpers mit der Temperatur T pro Wellenlängenintervall dλ zu be rechnen. Interessant ist hier die starke Abhängigkeit (vierte Potenz!) von der Wellen länge. Leider hat dieses Gesetz von Rayleigh und Jeans den entscheidenden Nachteil, dass die abgestrahlte Leistung für kleinere Wellenlängen immer weiter zunimmt. Die ser Effekt ist allgemein als Ultraviolettkatastrophe bekannt. Da es keinen kompensie renden Faktor gibt, der diesem Effekt entgegenwirkt, hätte dies eine unendlich große Energieabstrahlung für hohe Frequenzen zur Folge, was allerdings der alltäglichen Erfahrung widerspricht. Max Planck hatte daraufhin die Idee, die Abgabe der Energie zu quantisieren, und führte die Konstante h wie „hilf!“ ein, die später als das planck sche Wirkungsquantum bekannt wurde. Eine weitere Interpretation dieser wichtigen Konstante sowie der Zahlenwert werden im nächsten Abschnitt behandelt. Plancks Abwandlung des Rayleigh-Jeans-Gesetzes führte dann zum planckschen Strahlungs gesetz, das sich wie folgt schreiben lässt: M(λ) =
2πhc2 1 λ5 exp ( hc ) − 1 λkB T
(8.15)
Durch eine Näherung der Exponentialfunktion im Nenner lässt sich mithilfe einiger algebraischer Umformungen zeigen, dass das plancksche Strahlungsgesetz in das zuvor hergeleitete Rayleigh-Jeans-Gesetz übergeht. In Abbildung 8.1 ist ein Vergleich zwischen beiden Gesetzen dargestellt. Man sieht sehr deutlich den starken Anstieg
8.3 Quantenphysik | 311
Spektrale Abstrahlung [W/(m 2µm)]
1
·108 Planck
0.8 0.6 Rayleigh-Jeans
0.4 0.2 0
0.5
1 1.5 2 Wellenlänge [µm]
2.5
3
Abb. 8.1: Spektrale spezifische Ausstrahlung nach dem planckschen Strahlungsgesetz am Beispiel der Sonne mit einer Oberflächentemperatur von 5777 K. Zum Vergleich ist ebenfalls der Verlauf des Rayleigh-Jeans-Gesetzes eingezeichnet.
des Graphen, der aus dem Rayleigh-Jeans-Gesetz folgt. Lediglich für große Wellen längen zeigen sie ein ähnliches Verhalten. Das Maximum der abgestrahlten Leistung liegt bei etwa 500 nm. Hierauf lässt sich die maximale Empfindlichkeit unseres Au ges bei genau dieser Wellenlänge zurückführen. Die spektrale Verteilung, die man mit dem planckschen Strahlungsgesetz berechnen kann, stimmt exzellent mit den experimentell beobachteten Spektren heißer Körper überein. Obwohl es lediglich für ideale schwarze Körper hergeleitet wurde, lässt sich das Gesetz durch die Multi plikation mit einem material- und oberflächenabhängigen Emissionskoeffizienten ε auf nahezu alle Körper übertragen. Integriert man außerdem diese Formel über alle Wellenlängen, so lässt sich mit ein paar algebraischen Umformungen das bereits be kannte Stefan-Boltzmann-Gesetz herleiten, welches die abgestrahlte Leistung eines Körpers in Abhängigkeit der Temperatur beschreibt. Nach Plancks Strahlungsformel strahlen alle Körper mit einer Temperatur über 0 K elektromagnetische Wellen aus. Allerdings verschiebt sich die maximale Intensi tät vom infraroten Bereich hin zum sichtbaren Spektrum. Die Sonne strahlt entspre chend viel Leistung im sichtbaren Spektrum aus, wohingegen ein Körper bei Raum temperatur weniger Leistung und größere Wellenlängen emittiert. Eine Glühbirne mit einer Temperatur von 2700 km emittiert ebenfalls noch viel Strahlung im nicht sicht baren Bereich des Spektrums, weshalb ihre Effizienz gegenüber anderen künstlichen Lichtquellen sehr gering ist. Das Maximum liegt hier bei einer Wellenlänge von etwa 10 μm. Je heißer ein Körper wird, desto blauer leuchtet er, weil sich das Maximum immer mehr in Richtung des blauen und ultravioletten Teils verschiebt. Aus diesem Grund leuchten heiße Sterne eher bläulich, wohingegen kältere Sterne deutlich ro
312 | 8 Atom- & Kernphysik
ter strahlen. Dennoch ist das resultierende Licht immer eine Überlagerung unendlich vieler Wellenlängen, sodass das gesamte Spektrum als weißes Licht erscheint. Ebenfalls aus dem planckschen Strahlungsgesetz herleiten lässt sich das soge nannte Wien’sche Verschiebungsgesetz, das experimentell bereits früher gefunden wurde. Hierbei muss die Ableitung des planckschen Strahlungsgesetzes gleich 0 ge setzt werden, um die Extremstelle zu bestimmen. Dieses Gesetz sagt aus, dass das Produkt aus der Wellenlänge, bei der die Abstrahlung maximal ist, und der Tempera tur für alle Körper eine Konstante bildet. Es lässt sich daher über folgende Bedingung definieren: λmax T = 2897,8 μm K
(8.16)
Das Verschiebungsgesetz kann beispielsweise benutzt werden, um λmax bei einer ge gebenen Temperatur eines Körpers zu bestimmen. Andererseits kann es auch verwen det werden, um die Temperatur eines Körpers durch Bestimmung der Wellenlänge im Maximum der ausgestrahlten Leistung zu berechnen. Auf diese Weise kann beispiels weise die Oberflächentemperatur der Sonne bestimmt werden, für die sich ein Wert von knapp 5.800 K ergibt.
8.3.2 Fotoelektrischer Effekt Ab dem Jahr 1887 hatte der deutsche Physiker Wilhelm Hallwachs Experimente mit ultravioletter Strahlung und einem Elektroskop mit einer Goldplatte durchgeführt. Er machte die Beobachtung, dass sich bei der Bestrahlung des Metalls das Elektroskop aufgeladen hat. Lange Zeit konnte man sich diesen Effekt nicht erklären, bis Albert Einstein im Jahr 1905 die korrekte Erklärung lieferte, wofür er später im Jahr 1921 den Nobelpreis erhalten hat. Einstein hat erkannt, dass Licht seine Energie nicht konti nuierlich, sondern immer nur in Form kleiner Pakete abgeben konnte, die Photonen genannt werden. Jedes Photon überträgt dabei immer einen kleinen Teil der gesam ten Energiemenge des Lichts. Trifft ein solches Photon auf ein Elektron in einem Atom, dann kann dieses Elektron herausgeschlagen werden, wenn die Energie des Photons groß genug ist. Allerdings gab es zu diesem Zeitpunkt noch keine Möglichkeit, die Menge der abgegebenen Energie bestimmen zu können. Etwa 10 Jahre nach der Interpretation Einsteins hat der Physiker Robert Andrews Millikan genauere Untersuchungen dieses Effekts durchgeführt. Er entwickelte dazu die sogenannte Gegenfeldmethode, deren Funktionsweise durch den Aufbau in Abbil dung 8.2 erklärt wird. Bei dieser Methode wird ein Metall in einer Vakuumröhre mit Licht bestrahlt. Mithilfe eines Monochromators wird Wellenlänge des Lichts zuvor auf einen kleinen Spektralbereich eingeschränkt. Durch das Auftreffen des Lichts werden Elektronen aus dem Metall herausgelöst, welche anschließend auf einen Metallring treffen und dadurch einen Stromfluss auslösen. Ein entgegen der Flugbahn der Elek tronen angelegtes elektrisches Feld bremst die Elektronen ab, bis der Strom ab einer
313
8.3 Quantenphysik |
e− E kin
A
∆f ∆E f
WA
V Abb. 8.2: Die Messung des planckschen Wirkungsquantums und der Austrittsarbeit mithilfe der Gegenfeldmethode.
bestimmten Spannung zum Erliegen kommt. Mithilfe des Energieerhaltungssatzes 1 2 mv = eU 2
(8.17)
konnte Millikan dann durch Einstellung der Spannung ausrechnen, wie groß die kine tische Energie der Elektronen bei jeder Wellenlänge gewesen sein muss, und dies mit der Wellenlänge beziehungsweise der Frequenz des Lichts vergleichen. Millikan fand mit den gemessenen Daten einen linearen Zusammenhang zwischen den beiden Grö ßen. Trägt man in einem Diagramm wie in Abbildung 8.2 die kinetische Energie gegen die Frequenz auf, dann schneidet die sich daraus ergebende Gerade die y-Achse in ei nem Punkt. Der vertikale Abstand zwischen dem Ursprung des Koordinatensystems und dem Schnittpunkt entspricht der sogenannten Austrittsarbeit WA . Sie hängt vom Material ab und gibt an, wie stark die Elektronen an die Atome im Material gebun den sind. Die Steigung der Geraden ∆E/∆f ergibt das Verhältnis der Photonenenergie zur Frequenz des Lichts, welches als plancksches Wirkungsquantum bezeichnet wird. Dieses hat den Wert (8.18) h = 6,62607015 ⋅ 10−34 Js und die Einheit einer Wirkung. Die Energie von Licht wird somit immer quantisiert abgegeben. Die Energie eines einzelnen Photons ergibt sich somit aus dem Produkt aus planckschem Wirkungsquantum und Frequenz: E = hf
(8.19)
Ersetzt man die Frequenz durch die Wellenlänge, dann erhält man folgenden Zusam menhang: c E=h (8.20) λ
314 | 8 Atom- & Kernphysik
Aus der Relativitätstheorie ist folgende Relation zwischen Energie und Masse eines Körpers sehr gut bekannt: E = mc2
(8.21)
Sie besagt, dass Energie und Masse bis auf eine Konstante, das Quadrat der Lichtge schwindigkeit, identisch sind. Setzt man beide Energien aus (8.19) und (8.21) gleich und formt die Gleichung nach m um, so erhält man: m=
hf c2
(8.22)
Diese Masse darf allerdings nicht mit der Ruhemasse eines Teilchens wie dem Elektron verwechselt werden, weil sich ein Photon immer mit Lichtgeschwindigkeit bewegen muss und nicht abgebremst werden kann. Für den Impuls eines Photons gilt daher analog zur klassischen Mechanik: p = mc
(8.23)
Man kann nun das m durch die Gleichung (8.22) ersetzen und erhält folgende wichtige Beziehung zwischen dem Impuls und der Wellenlänge eines Photons: p=
h λ
(8.24)
Der Impuls eines Photons ist daher genauso quantisiert wie die Energie, wobei einmal die Wellenlänge und einmal die Frequenz betrachtet wird.
8.3.3 Welle-Teilchen-Dualismus Bis zur Entdeckung des Photons hatte man Licht immer als klassische Welle beschrie ben, da alle Erscheinungen des Alltags mit dem huygensschen Prinzip in Einklang zu bringen sind. Die Quanteneigenschaften von Licht waren völlig neu und unterschei den sich vollständig von der Alltagserfahrung der Menschen, denn in der klassischen, makroskopischen Welt gibt es keine Objekte, die sowohl Teilchen- als auch Wellenei genschaften zeigen. Louis de Broglie hatte 1924 die revolutionäre Idee, klassischen Teilchen wie Elektronen ebenfalls Welleneigenschaften zuzuordnen. Dazu hat er ein fach die Beziehung zwischen Impuls und Wellenlänge aus Gleichung (8.24) von Licht auf Teilchen übertragen. Somit ergibt sich für die Wellenlänge eines Materieteilchens die Beziehung: λ=
h p
(8.25)
8.3 Quantenphysik | 315
Die Welleneigenschaften von Elektronen und anderen Materieteilchen lassen sich mit dem Doppelspaltexperiment besser verstehen. Schickt man Elektronen durch diesen hindurch, können sie mit sich selbst interferieren und bilden auf einem Schirm ein Beugungsmuster. Obwohl das Elektron selbst weiterhin ein punktförmiges Teilchen ist, kann dessen Aufenthaltsort durch Wahrscheinlichkeitswellen beschrieben wer den. Die Wellenfunktion an sich besitzt keine physikalische Bedeutung, da sie nicht gemessen werden kann. Das Quadrat der Wellenfunktion ist hingegen ein Maß für die Wahrscheinlichkeit dafür, das Elektron in einem bestimmten Volumen zu finden. So bald man versucht, das Elektron zu lokalisieren, erzwingt man eine Wechselwirkung mit diesem und die Wellenfunktion bricht zusammen, was zu einem Verschwinden des Beugungsmusters führt. Die Elektronen verhalten sich dann wie klassische Teil chen. Die Welleneigenschaften von Elektronen werden bei Elektronenmikroskopen aus genutzt. Da die Wellenlänge von schnellen Elektronen typischerweise im Pikometer bereich liegt, ist die Auflösung eines solchen Mikroskops um ein Vielfaches höher als die eines normalen Lichtmikroskops, sodass noch wesentlich feinere Strukturen gut aufgelöst werden können. Damit die Elektronen nicht durch Stöße mit Gasmolekülen Energie verlieren, gestreut oder sogar eingefangen werden, muss im Innern eines Elek tronenmikroskops ein sehr gutes Vakuum herrschen, was eine Aufarbeitung der zu untersuchenden Probe in der Regel verkompliziert. Außerdem kann ein Elektronen mikroskop lediglich Helligkeitswerte unterscheiden, nicht aber verschiedene Farben. Die aufgenommenen Bilder müssen daher in vielen Fällen nachbearbeitet werden. Atome in makroskopischen Objekten besitzen aufgrund ihrer großen Masse und thermischen Bewegungen sehr viel Energie, sodass sich die Welleneigenschaften auf grund der kurzen Wellenlängen nicht bemerkbar machen. Das ist einer der Gründe, warum die quantenmechanischen Eigenschaften von Materie in unserer Umgebung nicht direkt spürbar sind. Die Quantenmechanik hat sich daher auch nicht sofort durchgesetzt und musste zunächst durch verschiedene Experimente bestätigt werden. Einer der beobachteten Effekte, der der Quantenmechanik letztlich zum Durchbruch verhalf, ist der sogenannte Compton-Effekt: Wenn ein Photon mit einem ungebun denen Elektron, wie es zum Beispiel in einem Metallgitter vorkommt, wechselwirkt, dann kann die Energie des Photons nicht wie beim Fotoeffekt vollständig auf das Elektron übertragen werden. Stattdessen stoßen Photon und Elektron analog zu Bil lardkugeln gegeneinander und ein Teil der Photonenenergie wird dabei in kinetische Energie des Elektrons umgewandelt. Der Energieverlust macht sich dadurch bemerk bar, dass die Wellenlänge des Photons größer wird und das Photon in einem Detektor ein geringeres Signal erzeugt.
316 | 8 Atom- & Kernphysik
8.3.4 Quantenzahlen 8.3.4.1 Drehimpuls Da der Impuls eng mit dem Drehimpuls verknüpft ist, liegt die Vermutung nahe, dass dieser ebenfalls quantisiert sein muss. Dies kann man sich zumindest für eine Kreis bahn relativ einfach plausibel machen. Wenn sich ein Elektron um einen festen Punkt herum bewegt, dann bildet sich aufgrund seiner Welleneigenschaften eine stehende Welle aus. Dafür muss der Umfang der Kreisbahn einem Vielfachen m der Wellenlänge entsprechen: 2πr = mλ (8.26) Ersetzt man nun λ durch die Beziehung λ = h/p und den Impuls mit der Formel p = m e v, so ergibt sich: h = mℏ (8.27) rm e v = m 2π Die linke Seite der Gleichung entspricht dabei dem Betrag des klassischen Drehim pulses L. Im letzten Schritt wurde das reduzierte plancksche Wirkungsquantum ein geführt, das durch die Beziehung h (8.28) ℏ= 2π definiert ist. Der Drehimpuls muss somit immer einem Vielfachen von ℏ entsprechen: L = mℏ
(8.29)
Obwohl die Herleitung stark vereinfacht wurde, kann man zeigen, dass diese Bedin gung tatsächlich für alle Arten von Zentralkraftfeldern gilt. In der Quantenmechanik sind sowohl die Richtung wie auch der Betrag des Drehimpulses quantisiert und kön nen daher nur bestimmte, ganzzahlige Vielfache von ℏ annehmen. Bei der gerade her geleiteten Beziehung handelt es sich nicht um den Betrag des Vektors, sondern ledig lich um seine Projektion auf eine beliebige z-Achse. Die Größe m wird magnetische Quantenzahl genannt und im Zusammenhang mit dem Drehimpuls als m l bezeich net. Sie kann entgegen der bisherigen Verwendung und der Intuition auch negative Werte annehmen. Das Ergebnis aus Gleichung (8.29) wird daher häufig als Lz = ml ℏ
(8.30)
geschrieben. Zusätzlich zur magnetischen Quantenzahl m l gibt es noch die Drehim pulsquantenzahl l, welche allerdings nur natürliche Zahlen, inklusive der 0, anneh men kann, d. h. l = 0, 1, 2, . . . . Die magnetische Quantenzahl muss hierbei immer einen Wert zwischen −l und +l annehmen, was folgendermaßen geschrieben werden kann: −l ≤ m l ≤ l
(8.31)
8.3 Quantenphysik | 317
z
y
2¯h ¯h x
Abb. 8.3: Mögliche Ausrichtung des Drehimpulsvek tors entlang der z-Achse für die Drehimpulsquan tenzahl l = 2.
Die Projektion auf die z-Achse ist allerdings immer kleiner als der Betrag des Dreh impulsvektors. Daher muss dieser ebenfalls eine nichtverschwindende Komponente in x- und y-Richtung haben. In der klassischen Modellvorstellung bedeutet dies, dass die Richtung der Drehachse um die z-Achse rotiert, genauso wie bei einem Kreisel, dessen Drehimpulsvektor nicht mit der Drehachse zusammenfällt. Dieser Zusammen hang ist in Abbildung 8.3 für eine Drehimpulsquantenzahl von l = 2 dargestellt. Je nach Größe der magnetischen Quantenzahl kann die Projektion auf die z-Achse ledig lich ℏ oder 2ℏ betragen. Der Drehimpulsvektor rotiert dann entlang des Mantels des eingezeichneten Zylinders um die z-Achse. 8.3.4.2 Spin Eines der wichtigsten Experimente des 20. Jahrhunderts ist der Stern-Gerlach-Versuch aus dem Jahr 1922. In diesem wurde ein Atomstrahl aus neutralen Silberatomen durch ein stark inhomogenes Magnetfeld geschossen. Man wusste damals schon, dass sich die Drehimpulse aller Elektronen in Silberatomen bis auf das Äußerste gegenseitig kompensieren, sodass der Gesamtdrehimpuls lediglich von einem Elektron abhängt. Da die Richtung des Drehimpulsvektors nach der klassischen Physik beliebig ausge richtet sein kann, würde man nach dem Durchlaufen des Magnetfeldes eine kontinu ierliche Aufspaltung des Strahls beobachten, die daher rührt, dass die Elektronen auf grund ihres Drehimpulses ein Dipolmoment erfahren. Tatsächlich beobachtete man allerdings eine diskrete Aufspaltung des Strahls. Dieses Ergebnis wurde so interpre tiert, dass die Elektronen einen intrinsischen Drehimpuls besitzen müssen, den man Spin nannte. Der Spin ist daher ebenfalls sowohl in seiner Richtung als auch in seinem Betrag quantisiert. Analog zum Bahndrehimpuls definiert man daher eine Spinquan tenzahl s, die im Gegensatz zu l nur den Wert 1/2 annehmen kann. Da für die magne tische Quantenzahl m s die gleiche Bedingung wie für m l gelten muss, kann m s ledig lich die Werte +1/2 und −1/2 annehmen. Heute geht man davon aus, dass Elektronen Punktteilchen sind und nicht rotieren können. Der Spin ist daher eine rein quanten mechanische Eigenschaft und kann mit keiner Erfahrung unseres Alltags verglichen werden.
318 | 8 Atom- & Kernphysik
8.3.4.3 Pauli-Prinzip Ein einzelnes gebundenes Elektron kann prinzipiell erst einmal jede Quantenzahl an nehmen, solange sie nicht wie beispielsweise beim Drehimpuls durch bestimmte Be dingungen eingeschränkt ist. Falls zwei oder mehr Elektronen zusammen ein quan tenmechanisches System bilden, ist das Pauli-Prinzip eine weitere Bedingung, die für alle Teilchen erfüllt sein muss. Die Gesamtwellenfunktion der beiden Elektronen beinhaltet alle Quantenzahlen wie Drehimpuls und Spin der Elektronen. Aufgrund der Ununterscheidbarkeit wird diese Wellenfunktion und damit auch die Aufenthalts wahrscheinlichkeit über das gesamte Volumen aber identisch 0, wenn man die Quan tenzahlen der Elektronen vertauscht. Daraus folgt, dass zwei Elektronen niemals in allen Quantenzahlen übereinstimmen dürfen oder anders ausgedrückt: In einem Zu stand mit zwei Elektronen müssen sich beide Elektronen mindestens in der magneti schen Spinquantenzahl m s unterscheiden. Das Pauli-Prinzip gilt nicht nur für Elek tronen, sondern im Allgemeinen für alle Teilchen, die wie das Elektron einen halb zahligen Spin besitzen.
8.4 Atomphysik 8.4.1 Bohr’sches Atommodell Niels Bohr hatte sich im Jahr 1912, lange nach den Streuversuchen durch Rutherford, die Frage gestellt, wo sich die Elektronen in der Atomhülle genau aufhalten. Er hat te daraufhin die Idee, dass die Elektronen wie die Planeten in unserem Sonnensys tem um den Atomkern herum kreisen. Dies soll am Beispiel des einfachsten Atoms, dem Wasserstoffatom mit einem Proton und einem Elektron, erläutert werden: Da die elektrische Kraft für die Kreisbewegung verantwortlich ist, können Zentripetal- und Coulomb-Kraft gleichgesetzt werden: m e v2 e2 = r 4πε0 r2
(8.32)
Hierbei wurde vorausgesetzt, dass Proton und Elektron dieselbe Ladung e besitzen. Da der Radius bestimmt werden soll, muss die Geschwindigkeit eliminiert werden. Da zu wird die Bedingung des Drehimpulses aus Gleichung (8.27) eingesetzt. Die Quan tisierung des Drehimpulses hat somit eine Quantisierung der möglichen Radien zur Folge, d. h., das Elektron kann nicht mehr jede beliebige Bahn einnehmen. Der von n abhängige Radius ergibt sich durch Umformen zu: r n = n2
4πε0 ℏ2 m e e2
(8.33)
Das Elektron kann sich nur auf Bahnen bewegen, die diese Bedingung erfüllen. Der kleinste Radius für n = 1 wird Bohr’scher Radius genannt.
8.4 Atomphysik | 319
Im nächsten Schritt versuchen wir, die zugehörigen Energieniveaus zu berechnen. Dazu multiplizieren wir Gleichung (8.32) mit r und erhalten dann auf der rechten Seite die negative potenzielle Energie gegen unendlich und auf der linken Seite die zweifa che kinetische Energie. Somit gilt für die kinetische Energie einer Kreisbahn: 1 Ekin = − Epot 2
(8.34)
Diese Beziehung wird auch als Virialsatz bezeichnet. Die Gesamtenergie des Elektrons berechnet sich gemäß: (8.35) E = Ekin + Epot Unter Verwendung des Virialsatzes ergibt sich: E=
1 1 e2 1 Epot = − 2 2 4πε0 r
(8.36)
Setzt man hier die bereits gefundene Beziehung für den Radius ein, dann ergibt sich schließlich für die Energie der Bahn mit dem Zustand n: 2
En = − (
me 1 e2 ) 4πε0 2ℏ2 n2
(8.37)
Zur Vereinfachung fasst man die Konstanten häufig in einer neuen Konstanten na mens Rydberg-Energie zusammen: 2
RE = (
me e2 ) 4πε0 2ℏ2
(8.38)
Das niedrigste Energieniveau nimmt das Elektron demzufolge im Zustand n = 1 ein. Dies entspricht dabei der Energie, die notwendig ist, um das Elektron unendlich weit vom Kern zu entfernen, also das Atom zu ionisieren. Das Elektron kann auch jederzeit von einem Zustand n1 in einen Zustand n2 mit größerer Energie wechseln, wenn es beispielsweise von einem Photon getroffen wird. In diesem Fall muss allerdings die Energie des Photons exakt der Energiedifferenz zwi schen diesen beiden Zuständen entsprechen: ∆E = E n2 − E n2 = R E (
1 1 − 2) 2 n1 n2
(8.39)
Beim Übergang von einem höheren in ein niedrigeres Energieniveau sendet das Elek tron hingegen ein Photon aus. Auch hier muss die Energie des Photons der Energie differenz zwischen den beiden Zuständen entsprechen. Die Wellenlänge dieses ausge strahlten beziehungsweise aufgenommenen Photons ergibt sich unmittelbar aus der Beziehung: hc ∆E = pc = (8.40) λ
320 | 8 Atom- & Kernphysik
Setzt man die hergeleitete Formel für ∆E ein und stellt die Gleichung entsprechend um, dann ergibt sich als Bedingung für die Wellenlänge des Photons: 1 1 m e e4 1 − ) = 2 ( λ 8ε0 h3 c n21 n22
(8.41)
Auch hier werden die Konstanten üblicherweise zusammengefasst: Rλ =
m e e4 8ε20 h3 c
(8.42)
Die neue Konstante R λ wird Rydberg-Konstante genannt. Diese Formel wurde mit dem Zahlenwert der Rydberg-Konstante bereits viele Jahre vor dem Bohr’schen Atommo dell von Johannes Rydberg aufgestellt, der diese aus den gemessenen Spektren aus gestrahlter Photonen bestimmt hatte. Das Bohr’sche Modell des Wasserstoffatoms beschreibt zwar viele experimentelle Beobachtungen aus den vorangegangenen Jahren sehr präzise, hat allerdings auch ei nige Nachteile. Wenn man die Kreisbewegung der Elektronen um den Atomkern her um von der Seite betrachtet, dann vollführt das Elektron eine Dipolschwingung. Es würde somit elektromagnetische Wellen aussenden und in kürzester Zeit so viel Ener gie verlieren, dass es in den Kern stürzt. Selbst Niels Bohr wusste, dass das Bohr’sche Atommodell zwar empirisch korrekte Ergebnisse liefert, aber letztlich nicht der wah ren Beschaffenheit von Atomen entspricht. Für Atome mit mehreren Protonen und Elektronen ist es hingegen überhaupt nicht mehr anwendbar.
8.4.2 Orbitalmodell Im Jahr 1926 hat der österreichische Physiker Erwin Schrödinger eine nach ihm be nannte Wellengleichung für Materiewellen aufgestellt. Mithilfe der Schrödinger-Glei chung war ab diesem Zeitpunkt möglich, die Radien und Energieniveaus des Wasser stoffatoms quantenmechanisch exakt zu berechnen, indem man analog zur Herlei tung von Bohr ein Elektron in einem Zentralkraftfeld betrachtet. Interessanterweise hat sich herausgestellt, dass die daraus erhaltenen Lösungen exakt mit Bohrs Formeln übereinstimmen und zusätzlich sogar noch weitere Details erklären können. Materie wellen lassen sich im Prinzip wie klassische Wellen beschreiben, können aber nicht direkt gemessen werden. Lediglich das Quadrat der Wellenfunktion eines Teilchens lässt sich anschaulich als ein Maß für die Wahrscheinlichkeit interpretieren, dieses Teilchen in einem bestimmten Bereich zu beobachten. Dies ist vergleichbar mit der Wellennatur des Lichts. Hier ist ebenfalls die Intensität als Quadrat des elektrischen Feldes die wichtige Größe. Die Bedingung für stehende Wellen in einem Atom wird da bei im Prinzip beibehalten, aber die Elektronen senden in diesem Modell keine elek tromagnetische Strahlung mehr aus, verlieren somit auch keine Energie mehr, stürzen also nicht mehr in den Atomkern.
8.4 Atomphysik | 321
Im Orbitalmodell des Atoms bezeichnet man die bereits im Bohr’schen Atommo dell eingeführte Zahl n als Hauptquantenzahl, die entsprechend die ganzzahligen Wer te 1, 2, . . . annehmen kann. Sie entspricht immer einer Schale im Atom, die jeweils einem Buchstaben aus dem lateinischen Alphabet, beginnend mit K, zugeordnet wer den. Somit befindet sich ein Elektron mit n = 1 in der K-Schale, mit n = 2 in der L-Schale usw. Genauere Betrachtungen zeigen, dass der Wert der Drehimpulsquanten zahl immer kleiner oder gleich der Hauptquantenzahl sein muss, d. h., es gilt l ≤ n. Jedem Wert von n und −l ≤ m l ≤ l können außerdem noch zwei Spinzustände mit m s = +1/2 und m s = −1/2 zugeordnet werden.
Abb. 8.4: Betrachtung einer Leuchtstoffröhre durch ein optisches Gitter mit einer großen An zahl an Spalten. Die diskreten Spektrallinien lassen sich leicht erkennen.
Experiment: Spektrallinien Man kann die Übergänge von einer Schale in eine andere sichtbar machen, sofern die Elektro nen dabei Photonen im sichtbaren Bereich des Spektrums aussenden. Hält man beispielsweise ein einfaches, optisches Gitter gegen eine Lichtquelle, so lassen sich die einzelnen Spektrallini en je nach Anzahl mehr oder weniger gut unterscheiden (Abbildung 8.4). Während eine Glühbirne ein thermische Strahlungsquelle ist und ihr Spektrum der Schwarzkörperkurve folgt, sendet ei ne Leuchtstoffröhre hauptsächlich bestimmte Wellenlängen aus, die überlagert ebenfalls weißes Licht ergeben.
8.4.3 Periodensystem der Elemente Insgesamt zeigt sich, dass sich der Aufbau aller Atome lediglich mithilfe des PauliPrinzips und der Tatsache, dass alle Elektronen in der Atomhülle immer ein energeti sches Minimum annehmen müssen, beschreiben lässt. Das chemische Element Heli um besitzt 2 Elektronen, die die Quantenzahlen n = 1, l = 0, m l = 0 und m s = +1/2 beziehungsweise m s = −1/2 besitzen müssen. Da sich in dieser Schale keine weite ren Elektronen mehr aufhalten dürfen, ohne das Pauli-Prinzip zu verletzen, muss ab Lithium die L-Schale mit n = 2 befüllt werden. Die Drehimpulsquantenzahl kann in dieser Schale dann die Werte l = 0 und l = 1 annehmen. Zusammen mit dem Spin der
322 | 8 Atom- & Kernphysik
Elektronen ergeben sich insgesamt 8 mögliche Zustände für die L-Schale, die dann beim Edelgas Neon angekommen ebenfalls gefüllt ist. Das nächste Elektron ab Natri um muss dann in die M-Schale ausweichen. In Experimenten konnte nachgewiesen werden, dass das Volumen eines Atoms beim Besetzen einer neuen Schale sprunghaft ansteigt. Dies kann als Bestätigung des quantenmechanischen Orbitalmodells gese hen werden. Eine solche Anordnung der chemischen Elemente hat es schon lange vor der Ent deckung der Quantenmechanik gegeben. Dmitri Mendelejew und Lothar Meyer haben bereits im Jahr 1869 unabhängig voneinander das Periodensystem der Elemente aufge stellt. Die Elemente wurden hierbei in aufsteigender Reihenfolge nach ihrer Protonen zahl Z, die in diesem Fall Ordnungszahl genannt wird, gruppiert angeordnet. Die Ge samtzahl der Nukleonen, bestehend aus Protonen und Neutronen, wird mit A gekenn zeichnet und entspricht somit der Summe A = N + Z. Ein chemisches Element X im Periodensystem kann demzufolge als AZ X geschrieben werden. Zwei Atome mit iden tischer Protonenzahl, aber einer unterschiedlichen Anzahl an Neutronen, nennt man Isotope. Jedes Atom mit einer bestimmten Ordnungszahl könnte theoretisch beliebig viele Isotope besitzen. Allerdings gibt es nur bestimmte Konstellationen für die Pro tonen- und Neutronenzahl, die über einen längeren Zeitraum hinweg stabil sind und nicht radioaktiv zerfallen. Dies bestimmt die Anzahl der Isotope pro Atomkern und die relative Häufigkeit einzelner Konstellationen. In den Tafeln des Periodensystems entsprechen die Reihen den bereits eingeführ ten Schalen. So sitzen die äußeren Elektronen in der ersten Reihe in der K-Schale, in der zweiten in der L-Schale usw. Entlang einer Spalte haben alle Atome ähnliche che mische Eigenschaften. Die erste Spalte ist mit den Alkalimetallen wie Natrium und Lithium besetzt. Diese sind sehr reaktiv, weil sie lediglich ein Elektron auf der äußers ten Schale besitzen und die Kernladung durch die Elektronen in den unteren Schalen besonders gut abgeschirmt wird. Außerdem ist hier der Radius des äußeren Elektrons besonders groß im Verhältnis zu den anderen Elementen derselben Reihe. Beide Ei genschaften sorgen dafür, dass diese Elemente eine geringe Ionisierungsenergie be sitzen und ihre äußeren Elektronen daher leicht an andere Atome abgegeben werden können. Die Edelgase in der letzten Spalte reagieren unter Normalbedingungen hin gegen sehr selten bis nie mit anderen Stoffen, da die Bindung an den Kern aufgrund ihrer kompakten Form besonders stark und die Abschirmung der Kernladung minimal ist.
8.4.4 Funktionsweise des Lasers Wenn ein Elektron in einem Atom von einem Photon getroffen wird, dessen Energie exakt der Energie zwischen dem Grund- und einem angeregten Zustand entspricht, dann wird das Elektron in diesen Energiezustand angehoben. Diesen Vorgang nennt man im Allgemeinen Pumpen. Von dort aus fällt es nach einiger Zeit wieder in den
8.4 Atomphysik | 323
Grundzustand zurück und sendet dabei ein Photon mit derselben Energie aus. Dieser Übergang wird spontane Emission genannt, weil er ohne äußere Einflüsse stattfindet. Befindet sich das Atom hingegen in einem angeregten Zustand und wird dann von ei nem Photon mit einer Energie getroffen, die der Energie des angeregten Zustandes ent spricht, dann fällt das Elektron unter Abgabe eines weiteren Photons unmittelbar in den Grundzustand zurück. Diesen Vorgang nennt man entsprechend induzierte Emis sion. Hierbei wird das neue Photon in Richtung des ursprünglichen Photons ausgesen det. Außerdem besitzen beide Photonen dieselbe Frequenz und Phase. Dieser Vorgang kann sich beliebig oft wiederholen, sodass ein dünner und sehr kohärenter Lichtstrahl entsteht. Die Anregung der Atome erfolgt in der Regel nicht mit Photonen, sondern mit Elektronen, die zunächst beschleunigt werden und dann mit den Atomen kollidieren, wodurch die benötigte Anregung hervorgerufen wurde. Den gesamten Vorgang nennt man im Englischen „Light amplification by stimulated emission of radiation“, was zur bekannten Abkürzung Laser führt. Für einen Laserbetrieb reichen zwei Energieniveaus allerdings nicht aus. Sobald nämlich die Hälfte der Atome auf das höhere Niveau angeregt wurde, ist die Wahr scheinlichkeit für ein Atom im Grundzustand, ein weiteres Photon zu absorbieren, genauso groß wie für ein angeregtes Atom, ein weiteres Photon über induzierte Emis sion abzustrahlen. Deshalb verwendet man üblicherweise Materialien, deren Atome drei oder vier mögliche Energieniveaus aufweisen. Das Termschema eines beliebigen Drei-Niveaulasers ist in Abbildung 8.5 dargestellt. Zunächst werden die Elektronen in den Atomen auf das höchste Niveau der drei möglichen Niveaus gepumpt. Von dort fallen sie ohne Aussendung von sichtbarer Strahlung in das darunterliegende Ener gieniveau. Der Übergang von diesem Niveau in den Grundzustand geschieht hingegen nur sehr langsam. Der mittlere Zustand reichert sich somit mit Elektronen an, bis ir gendwann eine Besetzungszahlinversion erreicht ist, d. h., mehr Elektronen im mittle ren als im untersten Zustand vorhanden sind. Dieser Zustand ist eine Bedingung für das Entstehen von Laserlicht durch stimulierte Emission. Man unterscheidet generell zwischen Gaslasern, Farbstofflasern mit einem flüs sigen Lasermedium und Feststofflasern, die meistens aus einem Halbleiterkristall be E3 abklingen, schnell, ohne Strahlung pumpen
E2
abklinken, langsam γ E1
Abb. 8.5: Schematische Darstellung der Energieni veaus in einem Drei-Niveaulaser.
324 | 8 Atom- & Kernphysik
stehen. Die physikalischen Abläufe sind aber im Prinzip bei allen drei Klassen iden tisch. Das verwendete Lasermaterial entscheidet allerdings über die Wellenlänge des Lasers, da die Stoffe unterschiedliche Energieniveaus besitzen. So emittiert beispiels weise ein Helium-Neon-Gaslaser Photonen mit einer Wellenlänge von 632,8 nm. Da Laserlicht sehr kohärent ist, eignet es sich in der Medizin besonders gut zur Diagnose wie der Messung der Strömungsgeschwindigkeit von Blut. Bei der LaserDoppler-Anemometrie (LDA) wird Laserlicht über einen Strahlteiler in zwei Strahlen aufgeteilt, die anschließend überlagert werden und dann aufgrund der Phasendiffe renz ein Interferenzmuster erzeugen. Bewegt sich ein Teilchen in einem Fluid durch das Interferenzmuster, kann der Dopplereffekt ausgenutzt werden, um dann aus einer resultierenden Schwebung die Geschwindigkeit des Fluids zu bestimmen. Weitere An wendungsgebiete sind Laserkorrekturen am Auge beziehungsweise die Verhinderung von Netzhautablösungen durch das Verschweißen von Gewebe. Außerdem werden in der Chirurgie häufig Laserskalpelle eingesetzt, um sehr präzise Schnitte durchführen zu können. Blutgefäße werden dabei aufgrund der sich entwickelnden Hitze direkt verschlossen, sodass ein nachträgliches Bluten verhindert wird, was als weiterer Vor teil angesehen werden kann.
8.5 Kernphysik 8.5.1 Kernmodelle 8.5.1.1 Tröpfchenmodell Obwohl die Prozesse, die in einem Atomkern ablaufen, etwas komplizierter sind, als sie im Folgenden dargestellt werden, kann man den Atomkern in guter Näherung zu nächst wie einen Wassertropfen betrachten. Die Wassermoleküle entsprechen dann den Protonen und Neutronen, die ständig miteinander wechselwirken. Die elektroma gnetische Wechselwirkung zwischen den Protonen, die durch die Coulomb-Kraft her vorgerufen wird, sorgt für eine Abstoßung der Protonen untereinander. Stabile Kerne kann es daher nur geben, wenn noch eine weitere Kraft involviert ist, die wesentlich stärker ist als die elektromagnetische Wechselwirkung und im Resultat zu einer An ziehung der Teilchen führt. Diese sogenannte starke Kraft oder Kernkraft wurde theo retisch vorhergesagt und in vielen Versuchen zur Kern- und Teilchenphysik immer besser verstanden. Sie wirkt zwischen allen Nukleonen in einem Atomkern und ist im Gegensatz zur Gravitation und elektromagnetischen Wechselwirkung sehr kurzreich weitig, sodass das Einflussgebiet auf den Atomkern beschränkt bleibt und in der uns umgebenden, makroskopischen Natur nicht direkt beobachtet werden kann. Durch die vereinfachte Annahme eines Wassertropfens lässt sich die Bindungs energie des gesamten Kerns quantitativ recht genau bestimmen. Die daraus resultie rende Formel wird nach den Physikern Hans Bethe und Carl Friedrich von Weizsä cker, dem älteren Bruder des deutschen Bundespräsidenten Richard von Weizsäcker,
8.5 Kernphysik | 325
als Bethe-Weizsäcker-Formel bezeichnet. Diese spielt in der Kernphysik eine wichtige Rolle. Zur Herleitung wird zunächst die Anziehung zwischen den Nukleonen betrach tet. Insgesamt gibt es bei A = N + Z Nukleonen A(A − 1)/2 mögliche Paare. Da die Kernkraft allerdings nur sehr kurzreichweitig ist, wirkt sie näherungsweise zwischen zwei benachbarten Nukleonen. Die anziehende Gesamtkraft wächst somit proportio nal zur Nukleonenzahl A, die wiederum proportional zum Volumen des Kerns ist. Man nennt den sich daraus ergebenden Term EV = aV A
(8.43)
daher auch Volumenterm. Die Nukleonen an der Oberfläche des Kerns erfahren eine geringere Bindung, weil weniger Protonen und Neutronen für die Anziehung zur Ver fügung stehen. Dadurch verringert sich die Bindungsenergie um eine Größe, die pro portional zum Verhältnis von Volumen und Oberfläche ist. Weil das Volumen propor tional zur dritten Potenz des Radius, die Oberfläche allerdings proportional zu seiner zweiten Potenz ist, ergibt sich der sogenannte Oberflächenterm zu: 2
EO = −aO A 3
(8.44)
Das negative Vorzeichen deutet an, dass der Kern dadurch im Gegensatz zum Volu menterm destabilisiert wird. Da die auseinandertreibende Coulomb-Kraft proportio nal paarweise zwischen den Protonen wirkt, muss die Kraft proportional zu Z(Z − 1) ansteigen. Gleichzeitig nimmt die elektromagnetische Energie mit steigendem Ab stand ab, was letztlich zum destabilisierenden Coulomb-Term führt: EC = −aC Z(Z − 1)A− 3 1
(8.45)
Mit diesen drei Termen weicht die berechnete Bindungsenergie allerdings noch stark von den gemessenen Werten ab. Stattdessen benötigt man noch zwei weitere Terme, die die quantenmechanischen Eigenschaften der Nukleonen berücksichtigen und in gewisser Weise eine Erweiterung des Tröpfchenmodells darstellen. Da Nu kleonen jeweils aus drei Quarks mit halbzahligem Spin bestehen, müssen Protonen und Neutronen ebenfalls einen halbzahligen Spin besitzen und unterliegen somit wie Elektronen dem Pauli-Prinzip. Es können lediglich ein Proton und Neutron denselben Zustand einnehmen. Je mehr sich Protonen- und Neutronenzahl in einem Kern un terscheiden, desto stärker wird damit die destabilisierende Wirkung. Dies lässt sich durch den Symmetrieterm (N − Z)2 ES = −aS (8.46) 4A in der Bindungsenergie beschreiben. Der letzte für die Bindungsenergie der Nukleo nen entscheidende Term ist der sogenannte Symmetrieterm. Dieser trägt der Tatsache Rechnung, dass Kerne mit einer geraden Anzahl an Protonen und Neutronen stabiler sind als Kerne mit einer ungeraden Anzahl. Solche Kerne nennt man gg-Kerne, wobei der erste Buchstabe für die Protonen- und der zweite für die Neutronenzahl steht. Die
326 | 8 Atom- & Kernphysik
instabilste Form erhält man für uu-Kerne, wenn also sowohl die Anzahl der Protonen als auch die der Neutronen ungerade ist. Die ug- beziehungsweise gu-Kerne liegen in diesem Fall genau dazwischen. Gleichzeitig nimmt der Effekt auf die Bindungsenergie mit steigender Nukleonenzahl ab. Insgesamt ergibt sich damit der Paarungsterm zu: −1/2
A { { { E P = a P {0 { { −1/2 {−A
(8.47)
Die gesamte Bindungsenergie ergibt sich dann durch die Summe aller Terme: EBind = EV + EO + EC + ES + EP
(8.48)
Die fünf Konstanten in den jeweiligen Energietermen wurden empirisch aus der Unter suchung verschiedener Kerne bestimmt, wodurch man folgende Werte erhalten hat: a V = 16,67 MeV
(8.49)
a O = 17,23 MeV
(8.50)
a C = 0,714 MeV
(8.51)
a S = 93,15 MeV
(8.52)
a P = 11,2 MeV
(8.53)
Die Bindungsenergie geht den Nukleonen dabei verloren. Aufgrund der einsteinschen Energie-Masse-Beziehung E = mc2 kann die Bindungsenergie in ein Masseäquivalent umgerechnet werden. Die sich daraus ergebende Differenz ∆m =
EBind c2
(8.54)
wird als Massendefekt bezeichnet. Die Masse des Kerns ist somit um den Betrag dieser Massendifferenz kleiner als die Summe der Massen aller Nukleonen. In der Literatur wird normalerweise nicht die gesamte Bindungsenergie eines Atomkerns angegeben, sondern stattdessen zum besseren Vergleich der Kerne untereinander das Verhältnis von EBind und der Nukleonenzahl A, also die Bindungsenergie pro Nukleon. Aus den Werten der Konstanten wird ersichtlich, dass die Bindungsenergie eines Kerns in der Größenordnung einiger MeV pro Nukleon liegt, was durch Experimente zur Untersu chung der ausgesendeten Strahlung und des Gewichts der Kerne sehr gut bestätigt wird. Die mithilfe der Bethe-Weizsäcker-Formel berechnete Bindungsenergie pro Nu kleon in Abhängigkeit der Massenzahl für die stabilsten Isotope jeder Ordnungszahl ist in Abbildung 8.6 dargestellt. Man erkennt, dass die Abweichungen bei kleineren
Bindungsenergie pro Nukleon [MeV]
8.5 Kernphysik | 327
10
8
6
4 gemessen berechnet
2 0
50
100 Massenzahl A
150
Abb. 8.6: Die berechnete und gemessene Bindungsenergie pro Nukleon in Abhän gigkeit der Massenzahl.
Kernen recht groß sind, wie beim Vergleich der gemessenen Datenpunkte mit der Kur ve sofort ersichtlich ist. Aber bereits ab einer Massenzahl von etwa A = 20 spiegelt die Berechnung die Messergebnisse trotz der sehr starken Vereinfachungen bei der Herleitung der Bethe-Weizsäcker-Formel sehr gut wider. Da die Stabilität der Kerne mit steigender Bindungsenergie ebenfalls zunimmt, sind viele Isotope im Bereich des Maximums nicht besonders radioaktiv. Der starke Anstieg der Kurve bei kleinen Mas senzahlen erklärt, warum Kernfusion von Wasserstoff zu Helium besonders viel Ener gie bereitstellt. Dieser Prozess läuft in unserer Sonne und allen Sternen im Universum in ihren Anfangsstadien auf diese Weise ab. Durch weitere Fusionierung können an schließend schwerere Kerne entstehen, wobei der Fusionsprozess bei Eisen abbricht, da hier die Bindungsenergie besonders groß ist. Normale Sterne sind daher nicht in der Lage, schwerere Elemente als Eisen zu produzieren. Diese können nach heutigem Stand der Forschung lediglich in Supernovae-Explosionen unter noch extremeren Be dingungen erzeugt werden. Bei der Kernspaltung läuft man ebenfalls entlang der Kur ve, aber in die umgekehrte Richtung: Man startet bei Elementen mit hohen Massen zahlen, wie beispielsweise Uran, und nutzt dann die frei werdende Energie bei der Umwandlung in Kerne mit kleineren Massenzahlen. Das Maximum befindet sich bei einer Massenzahl von A = 62. Die maximale Bin dungsenergie ist folglich bei 62 28 Ni erreicht. Bei kleineren Kernen ist die Oberfläche im Verhältnis zum Volumen relativ groß, sodass der Oberflächenterm als destabilisieren der Teil größeren Einfluss gewinnt. Bei größeren Kernen hingegen nimmt der Einfluss der Coulomb-Abstoßung immer weiter zu. Generell gilt hierbei, dass die Kerne umso kurzlebiger sind, je größer die Ordnungszahl ist. Ab einer gewissen Nukleonenzahl kommen Atome in der Natur nicht mehr vor und können somit lediglich künstlich mit Teilchenbeschleunigern erzeugt werden. Aber auch dort können sie lediglich für eine sehr kurze Zeit existieren, bevor sie zerfallen.
328 | 8 Atom- & Kernphysik
8.5.1.2 Schalenmodell Aufgrund der falschen Vorhersagen bei leichten Kernen und nicht mehr zu vernach lässigender Quanteneigenschaften hat man bereits in den 30er-Jahren des 20. Jahr hunderts analog zur Atomhülle die Einführung eines Schalenmodells vorgeschlagen. Die Theorien der beiden Bereiche Atom- und Kernphysik besitzen an diesen Stellen einige Anknüpfungspunkte. Dennoch gibt es einige gravierende Unterschiede zwi schen beiden Gebieten: So besteht der Kern aus zwei Teilchensorten, die Elektronen hülle hingegen lediglich aus einer. Außerdem liegt in der Kernphysik kein radialsym metrisches Potenzial vor. Stattdessen wechselwirken alle Nukleonen untereinander. Und der größte Unterschied ist die Tatsache, dass die Wechselwirkung zwischen Neu tronen und Protonen sehr stark und kurzreichweitig ist, was eine andere Form der Beschreibung erzwingt. Durch eine geeignete Annahme des Potenzials und mithilfe der Schrödinger-Gleichung können zumindest numerisch sehr gute Ergebnisse erzielt werden, die mit experimentellen Ergebnissen übereinstimmen. Das Schalenmodell hat sich daher im Laufe der Zeit als aktuelles Kernmodell durchgesetzt.
8.5.2 Kernspin Sobald ein geladenes Teilchen einen Drehimpuls hat, besitzt es ein magnetisches Mo ment. Wir definieren zunächst das magnetische Moment als Produkt von Stromstärke und dem Flächenvektor A,⃗ der senkrecht auf der vom Strom umschlossenen Fläche steht: μ⃗ = I A⃗ (8.55) Betrachtet man nun ein Elektron, das nach dem klassischen Atommodell um einen Atomkern mit dem Radius R und der Geschwindigkeit v herum kreist, dann ergibt sich dadurch ein elektrischer Strom, der sich wie folgt berechnen lässt: I=
e = ef t
(8.56)
Einsetzen in die Definition des magnetischen Momentes ergibt mit der Kreisfläche A = πR2 und der Beziehung ω = 2πf : μ⃗ = ef A⃗ =
1 2 eR ω⃗ 2
(8.57)
Der Drehimpuls ergibt sich über seine Definition für eine Kreisbahn zu: L⃗ = m e (R⃗ × v)⃗ = m e R2 ω⃗
(8.58)
Aus diesen beiden Gleichungen folgt unmittelbar der Zusammenhang zwischen ma gnetischem Moment und Drehimpuls: μ⃗ =
e ⃗ L 2m e
(8.59)
8.5 Kernphysik |
329
Wird das magnetische Moment durch den Spin eines Teilchens hervorgerufen, dann benötigt man noch einen Korrekturfaktor, der sich beim Proton experimentell zu g = 5,58 bestimmen lässt und Landé-Faktor genannt wird. Im Falle eines Protons muss die Masse m e außerdem noch durch die Protonenmasse m p ersetzt werden, welche etwa 1836-mal größer als die Elektronenmasse ist. In der Regel wird ge/(2m p ) zu einer neuen Konstanten γ zusammengefasst, was zu folgender Beziehung führt: μ⃗ = γ L⃗
(8.60)
Für das Proton ergibt sich damit der Zahlenwert: γ = 2,6718 ⋅ 108
C kg
(8.61)
Als Nächstes wollen wir die Stärke des Drehmoments bestimmen, das bedingt durch das magnetische Moment auf ein Teilchen wirkt. Dazu betrachten wir (ohne Beschränkung der Allgemeinheit) wie in Abbildung 8.7 dargestellt eine rechteckige Leiterschleife mit den Seitenlängen a und b, die um eine parallel zu a verlaufende Drehachse gegenüber den Magnetfeldlinien gedreht ist. Auf die beiden gegenüberlie genden Seiten a wirkt somit die Lorentzkraft: ⃗ F⃗ L = aI (â⃗ × B)
(8.62)
Hierbei ist â⃗ der Einheitsvektor in Richtung von a,⃗ da der Betrag a vor die Klammer gezogen wurde. Auf die Leiterschleife wirkt dann das folgende Drehmoment: b ̂ D⃗ = 2 (b⃗ × F⃗ L ) 2
(8.63)
Der Faktor 1/2 kommt daher, dass das Drehmoment in der Mitte der Leiterschleife an der Drehachse angreift. Der Faktor hingegen trägt der Tatsache Rechnung, dass das Drehmoment von beiden Seiten mit der Länge b ausgeübt wird und somit doppelt so
FL B
FL A a b I
Abb. 8.7: Skizze zur Herleitung des Drehmoments auf eine recht eckige Leiterschleife in einem Magnetfeld.
330 | 8 Atom- & Kernphysik groß ist. Setzt man jetzt F⃗ L ein, dann ergibt sich: ̂ ̂⃗ × B⃗ = I A⃗ × B⃗ D⃗ = abI (b⃗ × a)
(8.64)
Unter Verwendung der Definition des magnetischen Moments erhält man: D⃗ = μ⃗ × B⃗
(8.65)
Im nächsten Schritt kann das Drehmoment durch D⃗ = dL/dt und L⃗ durch den Zu sammenhang zwischen magnetischem Moment und Drehimpuls ersetzt werden, was zu folgender Differenzialgleichung führt: dμ⃗ = γ μ⃗ × B⃗ dt
(8.66)
Zerlegt man diese Gleichung in ihre Komponenten, dann erhält man für ein konstantes und homogenes B-Feld mit der Flussdichte B0 in z-Richtung: dμ x = γB0 μ y dt dμ y = −γB0 μ x dt dμ z =0 dt
(8.67) (8.68) (8.69)
Wie man leicht nachprüfen kann, sind die trigonometrischen Funktionen Sinus und Kosinus spezielle Lösungen dieses Systems aus Differenzialgleichungen. Man kann daher schreiben: μ x (t) = μ 0 cos ωL t
(8.70)
μ y (t) = μ 0 sin ωL t
(8.71)
Hierbei ist μ 0 das gesamte magnetische Moment. Diese beiden Gleichungen besagen daher nichts anderes, als dass der Vektor des magnetischen Momentes und somit der des Drehimpulses um die Magnetfeldlinien herum taumelt. Das klassische Analogon dazu ist ein Kreisel, den man während seiner Drehbewegung leicht nach unten drückt. Die Drehachse macht daraufhin eine ausweichende Bewegung und dreht sich um die ursprüngliche Richtung. Die Frequenz fL = ωL /(2π), mit der diese als Präzession be zeichnete Taumelbewegung stattfindet, wird Larmor-Frequenz genannt. Durch Einset zen der Gleichungen erhält man dann folgende Beziehung zwischen der Larmor-Fre quenz und der magnetischen Flussdichte: fL =
γB 2π
(8.72)
8.6 Radioaktive Strahlung
|
331
Die Larmor-Frequenz hängt somit bei gleichem Magnetfeld lediglich vom γ-Faktor ab, der von Kern zu Kern unterschiedlich ist. Befindet sich ein Kern in einem Magnetfeld, dann wirkt somit ein Drehmoment auf diesen. Da sich der Spin aufgrund der Richtungsquantisierung niemals exakt in Richtung der Magnetfeldlinien ausrichten kann, präzessiert der Kern somit mit der Larmor-Frequenz. Zum Übergang von einer Orientierung zu einer anderen muss Ener gie ∆E aufgenommen werden, die somit ebenfalls quantisiert ist. Diese Energiediffe renz hängt vom jeweiligen Kern ab und unterscheidet sich somit für verschiedene Ele mente. Bestrahlt man das Material mit einer elektromagnetischen Welle, deren Fre quenz in einem bestimmten Bereich verändert werden kann, dann beobachtet man bei der Photonenenergie ∆E = hf , die exakt dieser Energiedifferenz entspricht, eine Absorption der Welle, was im zugehörigen Sensor als Schwärzung sichtbar wird. Die Absorption ist dabei annähernd proportional zur Konzentration der zu untersuchen den Atome. Dieses bildgebende Verfahren nennt sich nuklearmagnetische Resonanz (NMR). Hauptsächlich wird es in der Materialwissenschaft für die Untersuchung der Elemente 11 H und 13 6 C verwendet. Dieses Verfahren funktioniert allerdings lediglich bei Kernen, in denen sich die Spins der Nukleonen nicht gegenseitig aufheben, d. h., der resultierende Gesamtspin darf nicht verschwinden. Im medizinischen Bereich wird dieses Verfahren in abgewandelter Form bei der Magnetresonanztomografie (MRT) eingesetzt. Hierbei wird anstelle eines homogenen ein stark inhomogenes Magnetfeld verwendet. Trifft nun eine elektromagnetische Wel le auf die Atome im Magnetfeld, dann werden diese zu einer Drehbewegung angeregt. Dazu muss das Magnetfeld allerdings eine bestimmte Stärke besitzen, die bei einem inhomogenen Magnetfeld aber lediglich in einer bestimmten Ebene vorhanden ist. Da vor und dahinter ist die Resonanzbedingung für eine bestimmte Frequenz nicht erfüllt und die Kerne können nicht angeregt werden. Durch die Rotation der Kerne entsteht ein Strom, der wiederum eine Wechselspannung in einem Sensor erzeugt. Je nach Zu sammensetzung des Gewebes erhält man unterschiedliche Signale, wodurch sich die Position und die Eigenschaften dieser Zusammensetzung durch bildgebende Verfah ren genau studieren lassen.
8.6 Radioaktive Strahlung 8.6.1 Alphastrahlung In allen Atomkernen existieren die starke Wechselwirkung als anziehende Kraft zwi schen den Nukleonen und die abstoßende Coulomb-Kraft zwischen den positiv gela denen Protonen. Insgesamt muss die anziehende Kraft überwiegen, damit der Kern stabil ist. In einigen Elementen kann sich aber kurzzeitig ein Protonenpaar mit ei nem Neutronenpaar verbinden und einen positiv geladenen Heliumatomkern formen. Die dabei frei werdende Bindungsenergie reicht dann aus, um das Teilchen auf ein
332 | 8 Atom- & Kernphysik
Coulombbarriere
V (r )
V (r ) = 1 /r gebunden
r
Kernradius Abb. 8.8: Kernpotenzial und Coulomb-Barriere zur Erklärung des Alpha-Zerfalls.
Potenzial zu heben, das über der Nulllinie liegt. Wenn dies der Fall ist, dann wird der 42 He-Kern, der beim radioaktiven Zerfall historisch als α-Teilchen bezeichnet wird, mit einer nicht verschwindenden Wahrscheinlichkeit durch die sogenannte CoulombBarriere, die in Abbildung 8.8 eingezeichnet ist, quantenmechanisch durchtunneln. Das Alphateilchen wird dann mit der Energie, die es bereits besitzt, aus dem Kern ge schleudert. Der Kern selbst erfährt dabei einen leichten Rückstoß. Dieser Vorgang ist auf der linken Seite von Abbildung 8.9 dargestellt. Die Energie dieser α-Strahlung hängt vom jeweiligen Kern ab, hat aber stets diskrete Werte, da es sich um einen Zweikörperzerfall handelt und Energie und Impuls analog zum Stoß zweier Teilchen zu jedem Zeitpunkt erhalten sein müssen. Aufgrund des ausgesen deten Heliumatomkerns verliert der Kern zwei Protonen und insgesamt 4 Nukleonen. Die gesamte Reaktion kann daher wie folgt geschrieben werden: A ZX
2 → A−4 Z−2 Y + 4 He
(8.73)
Da α-Strahlung aus relativ großen Teilchen besteht, die zudem noch stark wechsel wirken können, ist die Reichweite von α-Strahlung relativ gering. In Luft sind dies lediglich einige Zentimeter. Ein Blatt Papier reicht bereits aus, um diese Art von Strah lung abzuschirmen, sodass sie in der Regel nicht einmal die obersten Hautschichten
e− α
γ ν¯ e
Abb. 8.9: Die drei Grundformen der radioaktiven Strahlung.
8.6 Radioaktive Strahlung
| 333
durchdringt. Gefährlich sind α-Strahler aber dann, wenn sie inkorporiert werden und den menschlichen Körper von innen zerstrahlen. In diesem Fall ist die α-Strahlung die gefährlichste der drei Strahlenarten. Ein in der Natur vorkommender α-Strahler ist beispielsweise das Edelgas Radon, das der menschliche Körper hauptsächlich über die eingeatmete Luft aufnimmt und mit zur natürlichen Strahlenbelastung gehört. Es gibt Heilbäder, die sogenannte Radontherapie anbieten, bei der die Luft künstlich mit Radon angereichert wird oder bestimmte Höhlengrotten ausgewählt werden, die eine hohe Radondichte in der Luft besitzen. Es ist allerdings stark umstritten, ob der thera peutische Nutzen oder die Gefahr durch die zusätzliche Strahlenbelastung überwiegt.
8.6.2 Betastrahlung Freie Neutronen sind nicht stabil und zerfallen nach einiger Zeit in ein Proton, ein Elektron und ein weiteres Teilchen, das sich Anti-Elektron-Neutrino nennt. In einem Atomkern, in dem Teilchen mit anderen Nukleonen zusammenwirken, können sich diese Zeiten nicht nur ändern, sondern ebenfalls Protonen einen Umwandlungspro zess in jeweils ein Neutron, Positron (Antielektron mit positiver Ladung) und ein Elek tron-Neutrino umwandeln. Die negativ geladenen Elektronen aus dem ersten Prozess nennt man entsprechend β − -Strahlung. Der Kernumwandlungsprozess schreibt sich deshalb als: A ZX
→
A Z+1 Y
+ e− + ν̄ e
(8.74)
Die Anzahl der Nukleonen bleibt hierbei konstant, aber die Neutronen- und Proto nenzahl ändern sich, sodass auch ein neues Element entsteht. Der zweite Fall mit den positiv geladenen Positronen lässt sich völlig analog dazu als A ZX
→
A Z−1 Y
+ e+ + ν e
(8.75)
schreiben. Die Neutrinos haben eine verschwindend kleine Masse und besitzen keine Ladung. Da sie dadurch kaum mit der Umgebung wechselwirken, hat es lange gedau ert, bis man sie experimentell nachweisen konnte. Da die Energie der aus dem Kern abgestrahlten Elektronen beziehungsweise Positronen ein kontinuierliches Spektrum aufweist, hat Wolfgang Pauli vorgeschlagen, den β-Zerfall als Dreikörperzerfall zu be trachten. In diesem Fall kann das Neutrino beziehungsweise Antineutrino als drittes Teilchen einen Teil des Impulses aufnehmen und somit in unterschiedliche Richtun gen abgestrahlt werden. Das sich ergebende Spektrum von zwei willkürlich gewählten Betastrahlern ist in Abbildung 8.10 dargestellt. Die beiden unabhängig voneinander normierten Graphen stellen die Anzahl der erzeugten Elektronen pro Megalelektro nenvolt für 11 C und 14 C dar. Das mittlere Bild in Abbildung 8.9 zeigt die Aussendung eines Elektrons und eines Antineutrinos, wobei das Elektron und das Neutrino in beliebige Richtungen ausge
334 | 8 Atom- & Kernphysik ·10−2
Normierte Intensität
8
6
4
2
0
0.2
0.4
0.6
0.8
Energie [MeV] Abb. 8.10: Spektrum des Betazerfalls für 11 C und 14 C.
sendet werden können. Im Gegensatz zu Heliumkernen sind Elektronen viel leichter und wechselwirken lediglich über die elektromagnetische Wechselwirkung. Daher ha ben sie eine viel größere Reichweite und können lediglich nur durch einige Millimeter Aluminium oder Blei effizient abgeschirmt werden.
8.6.3 Gammastrahlung Nach einem radioaktiven Zerfall befinden sich Kerne meistens noch in einem ange regten Zustand und geben ihre überschüssige Energie in Form elektromagnetischer Strahlung ab. Da die Kerne relativ klein und die Energien groß sind, sind die ausge strahlten Photonen, auch γ-Strahlung genannt, sehr hochenergetisch und besitzen ge genüber sichtbarem Licht eine sehr kurze Wellenlänge. Im Gegensatz zu Materieteil chen oder langwelligen Photonen können γ-Quanten nur sehr schlecht abgeschirmt werden. Je nach Strahlung benötigt man einige Zentimeter Blei, um eine signifikante Reduktion der Strahlung zu erzielen. Obwohl es sich streng genommen nicht um einen Zerfall handelt und der Kern nach dem Aussenden des Photons unverändert existiert, schreibt man die Reaktionsgleichung typischerweise als: A ∗ ZX
→ AZ X + γ
(8.76)
Auf der rechten Seite von Abbildung 8.9 ist ein angeregter Kern dargestellt, der ein hochenergetisches Photon aussendet. In der Medizin werden Radionuklide in Form von γ-Strahlenquellen häufig eingesetzt. Um beispielsweise Veränderungen in der Schilddrüse zu untersuchen, wird ein Verfahren namens Szintigrafie eingesetzt. Hier
8.6 Radioaktive Strahlung
| 335
bei wird dem Patienten ein Technetiumpräparat an einer geeigneten Stelle eingesetzt und dann der Weg verfolgt, den die radioaktiven Atome im Laufe der Zeit zurücklegen.
Abb. 8.11: Aufnahme einer Nebelkammer mit einigen deutlich zu erkennenden Spuren.
Experiment: Nebelkammer Man kann die Spuren von radioaktiven Zerfällen mithilfe einer einfachen Nebelkammer, die leicht nachgebaut werden kann, sichtbar machen (Abbildung 8.11). Diese kann aus einem durchsichtigen Kunststoffgehäuse bestehen, das so auf einer Metallplatte platziert wird, dass das darin enthal tene Gasvolumen luftdicht abgeschlossen ist. An der oberen Innenseite des Gehäuses befindet sich in dem hier beschriebenen Aufbau eine mit Isopropanol getränkte Filzplatte. Die Metallplatte wird von unten mit Trockeneis auf ungefähr −80 °C heruntergekühlt. Dadurch entsteht eine dünne Schicht aus übersättigtem Alkohol. Die dort hindurchfliegenden radioaktiven Teilchen wirken wie Kondensationskeime und erzeugen je nach Teilchenart unterschiedliche Spuren. Schwere Alpha teilchen machen sich durch kurze und sehr breite Spuren bemerkbar, wohingegen Elektronen aus dem Betazerfall meistens dünne und gekräuselte Spuren erzeugen.
8.6.4 Zerfallsgesetz Jeder Atomkern eines radioaktiven Stoffes zerfällt mit einer bestimmten Wahrschein lichkeit. Somit muss die Anzahl der ausgesendeten Teilchen proportional zur Anzahl der noch vorhandenen Kerne sein: dN = −λN(t) dt
(8.77)
Der Proportionalitätsfaktor λ wird hierbei als Zerfallskonstante bezeichnet und hängt vom jeweiligen Atomkern ab. Das Minuszeichen symbolisiert eine zeitliche Abnahme der Kerne. Da lediglich die e-Funktion gleich ihrer Ableitung ist und somit diese Dif
336 | 8 Atom- & Kernphysik
ferenzialgleichung erfüllt, wählen wir den Ansatz: N(t) = N0 e−λt
(8.78)
Hierbei bezeichnet N0 die Anzahl der ursprünglichen Kerne, die zur Zeit t = 0 vorhan den sind. Man kann stattdessen auch die Masse der radioaktiven Probe einsetzen, da diese proportional zur Teilchenzahl ist. Dieser Zusammenhang wird als Zerfallsgesetz bezeichnet. Oft wird auch die Zerfallszeit τ als der Kehrwert von λ angegeben: τ=
1 λ
(8.79)
Hierbei handelt es sich folglich um die Zeit, nach der die Anzahl der Kerne um den Faktor 1/e zurückgegangen ist. Um mit dieser Gleichung zu berechnen, nach welcher Zeit eine bestimmte Anzahl der Kerne zerfallen ist, müssen beide Seiten logarithmiert werden, wobei zunächst durch N0 geteilt wird: N(t) ln = −λt (8.80) N0 Jetzt muss die Gleichung noch nach t umgestellt werden und man erhält 1 N(t) t = − ln λ N0
(8.81)
mit N(t) als die Anzahl der Kerne, die zur Zeit t noch vorhanden sind. Neben der An zahl der Kerne ist die Berechnung der verbleibenden Aktivität oft wichtig. Hierbei han delt es sich um die Anzahl der Zerfälle pro Sekunde und entspricht somit der Ableitung von N(t) nach der Zeit t: A(t) = A0 e−λt
(8.82)
Die Konstante A0 bezeichnet die Anfangsaktivität zur Zeit t = 0 und wurde benutzt, um die sich aus der Ableitung ergebende Größe −N0 λ vor dem Exponentialterm zu ersetzen. Um sich die benötigten Zeiten besser vorstellen zu können, gibt man häufig die Halbwertszeit T1/2 eines Stoffes an. Diese gibt im Gegensatz zu τ die Zeit an, nach wel cher die Hälfte eines vorhandenen Stoffes zerfallen ist. Mithilfe von Gleichung (2.46), die angibt, wie man Basen von Exponentialfunktionen ineinander umrechnet, erhält man durch Einsetzen eine Formel für die Umrechnung von λ in T1/2 : T1/2 =
ln 2 λ
(8.83)
8.6 Radioaktive Strahlung
|
337
Tab. 8.1: Einige radioaktive Isotope mit den jeweiligen Strahlenarten und Halbwertszeiten. Element
Nuklid
Strahlenart
Halbwertszeit
Radon Radon Technetium Cobalt Strontium
220 86 Rn 222 86 Rn 90 43 Tc 60 27 Co 90 39 Sr
α α β− , γ β− , γ β−
56 s 3,82 d 6h 5,3 a 28,1 a
1 Cobalt Strontium
Kerne
0.8 0.6 0.4 0.2 0
0
20 T 1/2 40
60
80
100
Zeit [a] Abb. 8.12: Grafische Darstellung des Zerfallsgesetzes am Beispiel von Cobalt und Strontium.
In diesem Fall kann das Zerfallsgesetz wie folgt umgeschrieben werden: −T t
N(t) = N0 2
1/2
(8.84)
Je nach Literatur kann jeweils eine der drei Konstanten λ, τ oder T1/2 angegeben sein. In Tabelle 8.1 sind einige bekannte radioaktive Isotope mit ihren jeweiligen Halbwerts zeiten angegeben. Die grafische Darstellung des Zerfallsgesetzes ist in Abbildung 8.12 zu sehen. Hier wurde außerdem die Halbwertszeit für Strontium gekennzeichnet.
8.6.5 Wechselwirkungsprozesse 8.6.5.1 Geladene Teilchen Wenn sich geladene Teilchen aus radioaktiven oder künstlichen Quellen durch Mate rie bewegen, dann verlieren sie üblicherweise Energie durch Ionisation, d. h., Elektro nen werden aus den Atomhüllen herausgeschlagen, wodurch sich die Geschwindig keit des Teilchens verringert. Der Energieverlust pro Wegstrecke dE/dx kann mithilfe der Bethe-Bloch-Formel berechnet werden, die beispielsweise wie folgt aufgeschrie
338 | 8 Atom- & Kernphysik
ben werden kann: 2
dE e2 2me c2 β 2 4πnz2 ) − β2 ) ⋅ ( ) ⋅ (ln ( = dx me c2 β 2 4πε0 I ⋅ (1 − β 2 )
(8.85)
Auf die Herleitung soll an dieser Stelle verzichtet werden, da hierfür ein tieferes Ver ständnis der Quantenmechanik und Relativitätstheorie notwendig wäre. Die meisten dieser Größen wurden allerdings bereits in früheren Kapiteln behandelt. Wichtig ist der lineare Zusammenhang zwischen Energieverlust und der Elektronendichte n des Materials, die aus der Dichte und der Kernzusammensetzung berechnet werden kann, und der Betafaktor, der gleich dem Verhältnis der Teilchengeschwindigkeit v und der Lichtgeschwindigkeit c ist. Dies entspricht ebenfalls dem Verhältnis p/E von relati vistischem Impuls und Gesamtenergie des Teilchens. Hinzu kommt noch das mittlere Ionisationspotenzial der Kerne, das entweder experimentell bestimmt oder mit der Formel I = 10Z eV
(8.86)
angenähert werden kann. Der Energieverlust ist gemäß Bethe-Bloch-Formel keine Konstante, sondern von der noch verbleibenden Energie der Teilchen abhängig. Er erreicht bei schweren Teil chen wie Protonen oder Ionen sein Maximum, kurz bevor das geladene Teilchen zum Stillstand kommt. Diese Stelle bezeichnet man als Bragg-Peak, der besonders bei der Strahlentherapie von Tumoren eine wichtige Rolle spielt. Hierbei werden Protonen (oder schwere Ionen) mithilfe von elektrischen Feldern in Teilchenbeschleunigern auf hohe Energien beschleunigt und dann auf das zu bestrahlende Gewebe gelenkt. Die Energie der Teilchen wird vorher berechnet und so gewählt, dass der Bragg-Peak mit
Energieverlust [MeV/mm]
3 1050 GeV 1055 GeV 2
1
0
0
5
10
15
20
25
30
35
Strecke [mm] Abb. 8.13: Energieverlust von Protonen in Wasser für zwei verschiedene Strahlenergien.
8.6 Radioaktive Strahlung
| 339
dem Tumor zusammenfällt, sodass das umgebende Gewebe viel schwächer geschä digt wird als der Tumor selbst. Abbildung 8.13 zeigt den Energieverlust pro Wegstrecke in Abhängigkeit der zurückgelegten Strecke von Protonen mit unterschiedlichen An fangsenergien (1050 GeV und 1055 GeV). Als Material wurde hierbei Wasser gewählt, da der Energieverlust ähnlich dem menschlichen Körper ist. In der Praxis variiert man die Energie des Protonenstrahls zwischen zwei Werten und kann somit den gesamten Bereich des Tumors bestrahlen. 8.6.5.2 Photonen Langwellige Strahlung, wie beispielsweise Mikrowellenstrahlung, kann den mensch lichen Körper zwar durchdringen, aber nach aktuellem Kenntnisstand keine direkten Schäden hervorrufen. Das im betroffenen Gewebe gespeicherte Wasser nimmt die Energie auf und kann sich lokal erwärmen. Ab einer bestimmten Energie können Photonen allerdings Veränderungen in Stoffen hervorrufen, die auf eine Ionisation der Atome beziehungsweise Moleküle zurückzuführen ist. In diesem Fall spricht man von ionisierender Strahlung. Bei niedrigeren Energien dominiert der Fotoeffekt, der ab einer bestimmten Energieschwelle vom Compton-Effekt weitgehend abgelöst wird. Bei noch höheren Energien, die oberhalb der Ruhemasse von zwei Elektronen liegen, kommt zusätzlich noch die Paarerzeugung hinzu. Hierbei wandelt sich das Photon nach dem Stoß mit Materie in ein Elektron-Positron-Paar um, das dann wiederum weitere Moleküle auf seinem Weg durch die Materie ionisieren kann. Die Abschwächung von Gammastrahlung von Materie lässt sich mit einem Gesetz angeben, das vollkommen analog zum Beer-Lambert-Gesetz als I(d) = I0 e
− dμ
(8.87)
geschrieben werden kann. Hierbei wird μ als Abschwächungskoeffizient bezeichnet und d gibt die zurückgelegte Strecke im Material an. Daraus lässt sich durch Umstellen der Abschwächungsformel der Wert von μ bestimmen: μ=
I(d) 1 ln d I0
(8.88)
Multipliziert man den Bruch I(d)/I0 mit der Zahl 100, dann erhält man unmittelbar die Absorptionsrate in Prozent. Analog lässt sich die Formel natürlich auch nach d umstellen, um bei bekanntem μ die Schichtdicke zu berechnen, welche benötigt wird, um die Strahlung um einen bestimmten Prozentsatz zu reduzieren: d=
1 I(d) ln μ I0
(8.89)
Der Absorptionskoeffizient μ hat die Einheit 1/m und muss aufgrund der energieab hängigen Wechselwirkungsprozesse ebenfalls von der Energie der Photonen abhän
Massenabsorptionskoeffizient [g /cm2 ]
340 | 8 Atom- & Kernphysik
103
Eisen Aluminium
102 101 100 10− 1 10−3
10−2 10−1 100 Photonenergie [MeV]
101
Abb. 8.14: Die Massenabschwächungskoeffizienten für Eisen und Aluminium.
gen. Außerdem spielt das verwendete Material eine entscheidende Rolle. Ein weiterer wichtiger Einflussfaktor ist die Kernladungszahl. Je mehr Protonen und somit auch Elektronen in einem Atom vorhanden sind, desto größer ist auch die Wahrscheinlich keit für die Wechselwirkung mit einem Photon, was wiederum einen größeren Absorp tionskoeffizienten zur Folge hat. Misst man die Anzahl der Photonen einer radioakti ven Quelle vor und nach einem Absorber der Dicke d, dann erhält man entsprechend die Werte für I0 und I(d). Zum besseren Vergleich der Absorptionseigenschaften verschiedener Materiali en wird häufig der Massenabschwächungskoeffizient μ/ϱ mit der Einheit g/cm2 eines Materials angegeben. Dieser ergibt sich somit einfach durch die Division des Absorp tionskoeffizienten μ durch die Dichte ϱ des Absorbermaterials. Die Massenabschwä chungskoeffizienten im Energiebereich zwischen 1 keV und etwa 10 MeV sind für Eisen und Aluminium in Abbildung 8.14 dargestellt. Es handelt sich hierbei um die Summe der drei Kurven für den Fotoeffekt, den Compton-Effekt und die Paarbildung. Obwohl die Werte besonders bei kleinen und großen Energien nicht sehr stark voneinander abweichen, muss berücksichtigt werden, dass Eisen eine deutlich größere Dichte und somit einen größeren Absorptionskoeffizienten als beispielsweise Aluminium besitzt. Analog zur Halbwertszeit beim radioaktiven Zerfall lässt sich ebenfalls eine Halb wertsdicke für die Absorption definieren. Diese hängt entsprechend über die Formel d1/2 =
ln 2 μ
(8.90)
mit dem Absorptionskoeffizienten zusammen. Sie gibt an, nach welcher Schichtdicke die Hälfte der Strahlung absorbiert worden ist. Während sie je nach Energie der Pho tonen in Luft bis zu einigen Hundert Metern groß werden kann, liegt sei bei Blei etwa zwischen 10 cm und bei 100 keV Photonenenergie und 13 m bei 10 MeV, was etwa um den Faktor 200 größer ist als bei Luft.
8.6 Radioaktive Strahlung
| 341
8.6.6 Detektoren 8.6.6.1 Geiger-Müller-Zählrohr Ein Geiger-Müller-Zählrohr (umgangssprachlich auch einfach Geiger-Zähler genannt) besteht, wie in Abbildung 8.15 dargestellt ist, aus einem Metallzylinder, der mit einem Edelgas unter geringem Druck gefüllt ist, und einem dünnen Draht, der entlang seiner Achse verläuft. Zwischen Gehäuse und Draht wird eine Hochspannung angelegt, so dass der Zylinder negativ und der Draht positiv geladen ist. Wenn ein geladenes Teil chen in das Zählrohr eindringt, dann ionisiert es das Gas entlang seiner Flugbahn. Handelt es sich dagegen um ein hochenergetisches Photon wird lediglich ein einzel nes Gasatom ionisiert. In beiden Fällen werden die entstandenen Elektronen im elek trischen Feld in Richtung des Anodendrahts beschleunigt. In dessen Nähe liegen die Feldlinien sehr dicht zusammen, sodass die Feldstärke hier besonders groß ist. Dies hat eine starke Beschleunigung der Elektronen zur Folge, die dann aufgrund ihrer da durch gewonnenen Energie weitere Gasatome ionisieren und somit eine Elektronenla wine auslösen. Die Folge ist ein elektrischer Strom, der von der Spannungsquelle aus durch das Zählrohr fließt. Das gemessene Signal, das als Spannungsabfall über einen in Reihe geschalteten Widerstand gemessen werden kann, ist dann so groß, dass es mithilfe eines empfindlichen Vorverstärkers entweder über einen Lautsprecher hörbar gemacht werden kann oder einen Mechanismus aktiviert, der die Anzahl der gemes senen Teilchen zählt. Damit lässt sich dann die Zählrate, d. h. die Anzahl der gemesse nen Ereignisse pro Sekunde, bestimmen, die wiederum proportional zur Aktivität der zu messenden Probe ist. Die Tatsache, dass die gemessene Aktivität immer kleiner als die wirkliche Aktivität ist, lässt sich damit begründen, dass der Detektor lediglich ei nen Teilbereich des gesamten Raumwinkels überdeckt, nicht jedes Teilchen mit dem Gas interagiert und jeder Zähler eine Totzeit besitzt. Diese ergibt sich dadurch, dass die positiv geladenen Ionen des Gases sehr langsam in Richtung der Kathode wandern Teilchen
Zählrohr
R
−
U
+
Verstärker Zähler Abb. 8.15: Funktionsweise und Prinzipschaltbild eines Geiger-Müller-Zählrohres.
342 | 8 Atom- & Kernphysik
und diese somit für einen gewissen Zeitraum abschirmen. Während dieses Zeitraums verringert sich das elektrische Feld so stark, dass keine weitere Gasverstärkung der Elektronen mehr stattfinden kann. Die so entstehenden Fehler sind systematischer Natur. Hinzu kommt noch ein statistischer Fehler, der allerdings umso kleiner wird, je mehr Ereignisse gemessen worden sind, also je länger die Messung durchgeführt wird. Im Grenzfall einer unendlich langen Messung würde dieser Fehler verschwin den, wohingegen der systematische Fehler weiterhin unverändert bleibt. 8.6.6.2 Fotomultiplier Ein Fotomultiplier (PMT) besteht im Wesentlichen aus einer fotosensitiven Kathode, aus der Elektronen durch das Auftreffen eines Photons herausgelöst werden können. Zwischen der Kathode und einer Anode am anderen Ende des PMTs wird eine Hoch spannung angelegt, die diese Elektronen beschleunigt. Um zuvor das einzeln erzeug te Elektron zu vervielfältigen, befindet sich auf dem Weg von der Kathode zur Anode eine bestimmte Anzahl an Metallplatten, die sogenannten Dynoden, welche über Wi derstände miteinander verbunden sind und somit einen Spannungsteiler bilden. Da durch wird die an den PMT angelegte Spannung in kleinere Werte pro Dynode zerlegt. Jedes Elektron, das auf eine Dynode trifft, schlägt aufgrund seiner hohen kinetischen Energie weitere Elektronen aus dem Metall heraus, wodurch ähnlich wie beim GeigerMüller-Zählrohr eine Elektronenlawine entsteht, deren Signal über eine empfindliche Schaltung gemessen werden kann. Zum Messen von hochenergetischen Teilchen wird vor dem PMT in der Regel ein Szintillator platziert. Dieser emittiert Photonen, wenn
γ
R0
R1
R2
R3
−
R4
R5
R6
+
Abb. 8.16: Allgemeiner Aufbau eines Fotomultipliers. Die Dicke der Pfeile ist ein Maß für die Anzahl der im Folgenden erzeugten Elektronen. Das erste Elektron wurde aus der Kathode links nach der Erzeugung niederenergetischer Photonen im Szintillator erzeugt. In der Anode rechts wird dann genug Ladung deponiert, um ein ausreichendes elektrisches Signal zu erzeugen.
8.6 Radioaktive Strahlung
| 343
ein Teilchen beim Durchqueren Energie verliert, die dann aus der Kathode des PMTs die zu verstärkenden Elektronen herauslösen. Der schematische Aufbau eines han delsüblichen PMTs ist in Abbildung 8.16 zu sehen. Nachdem ein hochenergetisches Photon durch den Szintillator in niederenergetisches Licht umgewandelt wurde, wird aus der Fotokathode ein Elektron herausgeschlagen, das durch die Dynodenstruktur multipliziert wird. Die Verstärkung des Anodensignals geschieht analog zum GeigerMüller-Zählrohr. Im medizinischen Bereich werden PMTs mit Szintillatoren beispielsweise bei der Positronenemissionstomografie (PET) eingesetzt, deren Funktionsweise in Abbil dung 8.17 skizziert ist. Hierbei wird dem Patienten ein sogenanntes Radiopharmakon zugeführt, das aus einer radioaktiven Substanz besteht. Häufig kommt hierbei FDG zum Einsatz, das ein mit radioaktivem Fluor markiertes Traubenzuckermolekül dar stellt. Da beispielsweise Krebszellen einen erhöhten Energiebedarf haben, reichern sich die Moleküle hier besonders stark mit diesem Material an. Fluor ist ein β + -Strah ler mit der Besonderheit, dass sich die meisten Positronen mit den Elektronen in der Atomhülle vernichten. Beide Teilchen erzeugen somit aufgrund der Energieerhaltung zwei Photonen mit jeweils der Ruheenergie E = m e c2 eines Elektrons beziehungs weise Positrons, sodass jedes Photon eine Energie von 511 keV mit sich führt. Da sich beide Photonen mit Lichtgeschwindigkeit und in entgegengesetzte Richtung ausbreiten, kann durch die Messung von identischen Ereignissen mit jeweils zwei ge genüberliegenden Detektoren ein Schnittbild der betroffenen Region erstellt werden. Die Detektoren bestehen im Wesentlichen aus Szintillatoren und PMTs, die elektri sche Signale zur Rekonstruktion der Position erzeugen. Moderne Elektronik bietet zudem Zeitauflösungen von besser als 100 ps. Dies ist ausreichend, um zusätzlich die Laufzeitunterschiede der beiden Photonen zu messen, was zu einer deutlichen Verbesserung der räumlichen Auflösung führt. Dieses Verfahren wird daher auch Time-of-Flight-PET (ToF-PET) genannt. Die Strahlenbelastung der PET liegt meistens
Szintillatoren Patient
γ
γ Photomultiplier
Abb. 8.17: Skizze zur Funktionsweise der Positronemissionstomografie.
344 | 8 Atom- & Kernphysik
im Bereich der einer Computertomografiemessung. Diese oder eine MRT-Messung werden allerdings ohnehin meistens in Kombination mit der PET durchgeführt. 8.6.6.3 Halbleiterdetektoren Halbleiterdetektoren eignen sich sehr gut für den Nachweis radioaktiver Strahlung. Im Prinzip handelt es sich hierbei um eine in Sperrrichtung betriebene Diode mit ei ner breiten Sperrschicht. Ein geladenes Teilchen erzeugt entlang seiner Spur ElektronLoch-Paare, die ein elektrisches Signal zur Folge haben. Photonen der γ-Strahlung erzeugen ebenfalls ein Signal, indem ihre gesamte Energie aufgrund des Fotoeffekts an das Halbleitermaterial abgegeben wird. Das verwendete Halbleitermaterial sowie mögliche Dotierungen müssen dabei auf die zu messende Strahlung abgestimmt wer den, damit man eine hohe Effizienz erhält.
Abb. 8.18: Ein radioaktives oder kosmisches Teilchen trifft auf den Kamerasensor einer handelsüblichen Spiegelreflexkamera.
Experiment: Langzeitbelichtung Mit etwas Geduld kann man radioaktive und kosmische Teilchen mithilfe einer einfachen Spie gelreflexkamera aufnehmen. Dazu muss die Öffnung, auf die das Objektiv gesetzt wird, lichtdicht abgeschlossen werden. Anschließend muss eine Langzeitbelichtung von etwa einer Minute durch geführt werden. Dieser Vorgang ist so lange zu wiederholen, bis man auf einem der Bilder eine längliche Spur wie die in Abbildung 8.18 erkennt. In diesem Fall ist ein geladenes Teilchen, zum Beispiel aus einem radioaktiven Zerfall, schräg durch den Kamerachip geflogen und hat dabei im Halbleitermaterial einige Elektron-Loch-Paare erzeugt, die durch Aufhellung der Pixel sichtbar wer den.
8.6.7 Radiokarbonmethode Eine wichtige Anwendung von Radioaktivität in der Physik ist die Altersbestimmung von Objekten mithilfe der sogenannten Radiokarbonmethode (auch C14-Datierung ge nannt), die im Jahr 1946 von dem Chemiker Willard Frank Libby entwickelt wurde. Hierbei wird ein natürliches Phänomen ausgenutzt, bei dem durch den Beschuss mit kosmischer Strahlung in der Atmosphäre das radioaktive Kohlenstoffisotop 14 6 C aus
8.6 Radioaktive Strahlung
| 345
14 der Umwandlung von 14 7 N kontinuierlich entsteht. 6 C ist ein Beta-Minus-Strahler und wandelt sich durch das Aussenden eines Elektrons wieder in Stickstoff um. Während des Lebenszyklus eines organischen Materials wird ständig Kohlenstoff aus der Au ßenwelt aufgenommen und in Form von Biomasse eingelagert. Nach dem Tod des Or ganismus kommt dieser Prozess zum Erliegen und die Anzahl der 12 6 C-Atome bleibt nahezu konstant. Die radioaktiven Kohlenstoffatome zerfallen allerdings im Laufe der Zeit, sodass aus der Differenz zwischen der theoretisch vorhandenen und tatsächlich gemessenen Menge an 14 6 C unter Verwendung des radioaktiven Zerfallsgesetzes das Alter bestimmt werden kann. Da allerdings die Anzahl der 14 6 C-Atome in der Atmosphäre über lange Zeiträume hinweg nicht konstant ist, muss die Messung mithilfe von anderweitig gewonnenen Messdaten kalibriert werden. Gründe für die Schwankungen sind beispielsweise Än derungen in der Intensität der kosmischen Strahlung durch Fluktuationen in der Son ne oder Schwankungen im Erdmagnetfeld, was zu einer stärkeren oder schwächeren Ablenkung der kosmischen Strahlung führt. Seit einigen Jahrzehnten kommen noch Effekte wie die im Zuge der Industrialisierung entstandene Verbrennung von fossilen Brennstoffen, was als Suess-Effekt bezeichnet wird, und neuerdings auch Atomwaffen tests hinzu. Die Kalibrierungsdaten können beispielsweise aus der Vermessung von Baumringen gewonnen werden, da deren Dicke maßgeblich von klimatischen Einflüs sen abhängt. Eine solche Kalibrierungskurve für die letzten zehntausend Jahre ist in Abbildung 8.19 dargestellt, die anhand von offen zugänglichen Messdaten der Univer sity of Washington erstellt wurde. Der Graph zeigt das sich aus der Messung ergebende Alter, auch Radiokarbonalter genannt, und das danach zu berechnende wahre Alter nach Kalenderjahren BP (before present). Mithilfe moderner Messmethoden ist eine Altersbestimmung von bis zu etwa 50.000 Jahren in die Vergangenheit möglich. Mit modernen Bestimmungsmethoden
Radiokarbonjahr (BP)
10.000 8.000 6.000 4.000 2.000
10.000 8.000 6.000 4.000 2.000 Kalenderjahr (BP)
0
Abb. 8.19: Kalibrierungsdaten zur Bestimmung des Alters einer Probe mithilfe der Radiokarbonme thode. Die Korrekturen machen sich in den Abweichungen von der Geraden bemerkbar.
346 | 8 Atom- & Kernphysik
können dabei auftretende Ungenauigkeiten bis auf einige Jahrzehnte minimiert wer den. Bestimmen lässt sich die Anzahl der 14 6 C-Atome in Objekten mit verschiedenen Verfahren. Die einfachste Methode ist die Verwendung eines Geiger-Müller-Zählers, mit dem die Anzahl der radioaktiven Zerfälle pro Sekunde gemessen werden kann. Die daraus resultierende Größe ist wiederum proportional zur Anzahl der vorhande nen Atome. Daneben gibt es noch weitere, moderne Verfahren wie die Verwendung von Massenspektrometern oder speziellen Plasmakammern, die eine vorherige Pro benentnahme weitgehend überflüssig machen. Allerdings sind diese Verfahren auch deutlich aufwendiger und teurer.
8.7 Röntgenstrahlung 8.7.1 Erzeugung Röntgenstrahlung kann aufgrund ihrer Wellenlänge menschliches Gewebe leicht durchdringen, wird aber beispielsweise von dichtem Material wie Knochen absor biert. Man erzeugt Röntgenstrahlung mit einer evakuierten Röntgenröhre wie in Ab bildung 8.20 dargestellt, in der sich eine Glühkathode befindet, die sich durch An legen einer Spannung aufheizt. Diese Spannung wird demzufolge Heizspannung UH genannt. Durch den glühelektrischen Effekt können Elektronen für jeweils einen kurzen Zeitraum aus dem Glühdraht ausgedampft werden. Es bildet sich daher eine sehr dünne Elektronenwolke um die Glühkathode herum. Um zu verhindern, dass sie anschließend wieder von der positiv geladenen Glühwendel angezogen werden, legt man eine Hochspannung zwischen dem Heizdraht und einer einige Zentimeter davon entfernten Anode an. Die Elektronen werden dann in dem daraus resultieren den elektrischen Feld beschleunigt und treffen dann auf die abgeschrägte Anode. Man nennt diese Spannung daher Beschleunigungsspannung UB . Beim Auftreffen auf
UH
e−
UB
γ
Abb. 8.20: Schematischer Aufbau einer Röntgenröhre mit Glühwendel und Kupferanode. Ein Elek tron wird aus der Heizkathode ausgedampft und zur angeschrägten Anode beschleunigt, wo es hochenergetische Photonen durch Bremsstrahlung erzeugt.
8.7 Röntgenstrahlung
|
347
die Anode, die meistens aus Wolfram hergestellt wird und in einen Kupferblock zur Kühlung eingefasst ist, werden die Elektronen abgebremst, wodurch elektromagneti sche Strahlung freigesetzt wird. Die kleinste Wellenlänge dieser nach Conrad Röntgen benannten Röntgenstrahlung berechnet sich nach dem Energieerhaltungssatz gemäß h
c = eUB , λ
(8.91)
hc eUB
(8.92)
was nach λ umgestellt λmin =
ergibt. Strahlung mit kleinerer Wellenlänge kann somit nicht emittiert werden. Die Wellenlänge der emittierten Strahlung wird mit dem Begriff der Strahlenhärte klassi fiziert, d. h., je kurzwelliger die Strahlung ist, desto härter ist sie. Sie lässt sich somit über die Spannung UB einstellen. Die Intensität der Strahlung und somit die Belich tungszeit des Detektors hängen allerdings maßgeblich von der Anzahl der beschleu nigten Elektronen ab, die mit größer werdender Temperatur der Glühwendel ansteigt. Man kann diese folglich über die Einstellung von UH regulieren. Zusätzlich wird die Glühkathode oft in einen negativ geladenen Wehneltzylinder aus Metall eingefasst, der eine kleine Öffnung besitzt, aus dem die Elektronen austreten können. Durch Einstel len der Spannung können einige der Elektronen so weit abgebremst werden, dass sie den Zylinder nicht verlassen können, wodurch die Intensität der Röntgenstrahlung schwächer wird. Da die gesamte Energie der Elektronen allerdings oft nicht sofort abgegeben wird, entsteht ein kontinuierliches Spektrum an Wellenlängen über einen großen Wellen längenbereich hinweg. In diesem Spektrum gibt es allerdings auch einzelne abge grenzte Bereiche, die eine besonders große Intensität aufweisen. Die Position dieser Peaks hängt dabei vom verwendeten Anodenmaterial ab, wie sich experimentell leicht herausfinden lässt. Sie entstehen, wenn die beschleunigten Elektronen beim Abbrem sen in der Anode gebundene Elektronen aus der K-Schale des Metalls herauslösen. Ein Elektron aus einer höheren Schale oder sogar freie Elektronen können dann in die entstehende Lücke fallen und somit Photonen mit diskreten Energien aussenden. Kommt das Elektron aus der zweiten Schale, spricht man von der Kα -Linie. Bei Elek tronen aus der dritten Schale wird die Kβ -Linie gebildet. Diese beiden Linien spielen in der Praxis, zum Beispiel beim Röntgen von Lebewesen oder bei Untersuchung von Kristallen, eine wichtige Rolle. Daneben gibt es auch die deutlich schwächeren L-Li nien mit Lα , β , . . . , die beim Übergang der Elektronen aus höheren Schalen in die frei werdende L-Schale fallen. In Abbildung 8.21 ist das experimentell bestimmte Rönt genspektrum einer willkürlich gewählten Anode im Bereich zwischen 25 und 100 pm abgebildet. Deutlich hervorgehoben sind die beiden Peaks der Kα - und der Kβ -Linie.
Intensität
348 | 8 Atom- & Kernphysik
30
40
50 60 70 80 Wellenlänge [pm]
90
100
Abb. 8.21: Beispiel eines gemessenen Röntgenspektrums mit zwei ausgeprägten Linien der charak teristischen Röntgenstrahlung.
8.7.2 Anwendung 8.7.2.1 Medizinische Anwendung Röntgenstrahlung wird häufig verwendet, um bestimmte Körperregionen genauer zu untersuchen, ohne die jeweilige Stelle durch einen (minimal-)invasiven Eingriff offen legen zu müssen. Hierbei wird das Absorptionsgesetz von Röntgenstrahlung in Mate rie ausgenutzt, da beispielsweise hartes Material wie Knochen Röntgenstrahlung we sentlich besser absorbiert als weiches Gewebe. Da Röntgenstrahlen aufgrund ihrer kurzen Wellenlänge dieselben Eigenschaften wie γ-Strahlen haben, können sie auch auf identische Weise detektiert werden. Ist man lediglich an der Intensität interessiert, lassen sich Fotomultiplier oder Geiger-Zähler verwenden. Oft benötigt man allerdings auch räumliche Informationen über eine zu untersuchende Probe oder Verletzungen im menschlichen Körper. Zu diesem Zweck hat man früher ausschließlich sensitive Fo toplatten verwendet, in denen sich Silber befindet, das durch die Photonen der Rönt genstrahlung chemisch so verändert wird, dass es sich bei der Entwicklung schwarz färbt (Silber wird lediglich unter bestimmten Bedingungen metallisch glänzend). Heu te benutzt man für die Untersuchungen überwiegend Kamerasensoren auf Silizium basis. Jeder Pixel stellt dabei eine einzelne Diode mit einem pn-Übergang dar. Da die Halbleiterdetektoren in der Regel wesentlich sensitiver als Fotoplatten sind, kann die Strahlenbelastung für den Patienten deutlich minimiert werden. Außerdem können die Sensoren direkt ausgelesen werden, sodass ein zeitaufwendiger Entwicklungspro zess mit anschließender Digitalisierung übersprungen werden kann. Ein Beispiel für eine Röntgenaufnahme des Thoraxes eines Patienten mit einem Halbleiterkamerasen sor ist auf der linken Seite von Abbildung 8.22 zu sehen. Dennoch hat das herkömmliche Röntgenverfahren einige Nachteile. So wird bei spielsweise das gesamte Körpervolumen in Strahlrichtung auf eine zweidimensionale
8.7 Röntgenstrahlung
| 349
Abb. 8.22: Beispiel für eine Röntgenaufnahme des Thoraxes (links) sowie einer CT-Aufnahme des Schädels (rechts).
Fläche projiziert, sodass das gesamte Gewebe zwischen Röntgenröhre und Sensor den Strahl beeinflusst. Um alle Bereiche des Körpers zu untersuchen, muss das Gewebe daher in Schichten untersucht werden. Dies wird erreicht, indem man eine Röntgen quelle um den Patienten herumfahren lässt. Dieses Verfahren wird Computertomogra fie genannt. Der Sensor bewegt sich dabei auf der gegenüberliegenden Seite des Kör pers mit der Quelle mit. Mithilfe ausgeklügelter Rekonstruktionsalgorithmen können Computer einzelne Ebenen herausschneiden und für diese die Absorption der Strah lung darstellen. Mit dieser Methode kann der gesamte Patient schichtweise untersucht werden. Dies ist am Beispiel auf der rechten Seite von Abbildung 8.22 dargestellt. Hier ist eine Schicht einer CT-Aufnahme des menschlichen Schädels und des Gehirns zu sehen. Die Schädeldecke absorbiert hierbei besonders viel Röntgenstrahlung und ist deshalb nahezu weiß. Verwendet man zwei Röntgenquellen statt einer, können sogar bewegte Regionen, wie etwa das menschliche Herz, scharf dargestellt werden. Dieser Aufbau ist in Abbildung 8.23 skizziert. Die Detektoren werden synchron mit den Rönt genröhren um den Patienten herumgefahren und erzeugen somit ein Schichtbild der betroffenen Körperregion.
Röntgenröhren Patient
Detektoren Abb. 8.23: Skizze zur Computertomografie. Die Detektoren werde zusammen mit den Röntgenröhren um den Patienten herumgefahren.
350 | 8 Atom- & Kernphysik
8.7.2.2 Bragg-Reflexion Neben der medizinischen Untersuchung von Patienten wird Röntgenstrahlung eben falls häufig in der Kristallografie als Spezialgebiet der Materialwissenschaften einge setzt, um beispielsweise die Gitterstruktur verschiedener Kristalle zu vermessen. Da zu wird Röntgenstrahlung auf eine Probe des zu bestimmenden Materials geschossen und die Intensität mithilfe eines geeigneten Detektors gemessen. Die Probe ist dabei drehbar gelagert und der Winkel α zwischen Probe und Röntgenstrahl wird in diskre ten Werten abgefahren. Gleichzeitig muss sich der Detektor um den Winkel 2α wei terbewegen, um den reflektierten Strahl zu messen, wie man unmittelbar aus dem Reflexionsgesetz ablesen kann. Die Röntgenstrahlung wird allerdings nicht nur an ei ner Ebene, sondern an mehreren Kristallebenen gestreut, was zu einer Interferenz der Teilstrahlen führt. Aus der Skizze auf der linken Seite von Abbildung 8.24 kann man die Beziehung zwischen dem Abstand d der Kristallebenen und dem Gangunterschied ∆s ablesen: ∆s sin α = (8.93) d Mit der Bedingung ∆s = nλ für das n-te Maximum folgt daraus sofort: nλ = 2d sin α
(8.94)
Diese Gleichung wird auch Bragg-Bedingung genannt. Sie ähnelt der Bedingung für konstruktive Interferenz beim optischen Gitter, enthält aber aufgrund der doppelten Laufzeit durch Reflexion noch einen Faktor 2 auf der rechten Seite. Hat man den Win kel α gemessen und ist die Wellenlänge der Röntgenstrahlung bekannt, dann las sen sich damit die Abstände zwischen den Gitterebenen bestimmen. Ein solcher Auf bau ist in Abbildung 8.25 zu sehen. Die von links einfallende Röntgenstrahlung wird an dem Kristall in der Mitte gebeugt und anschließend mit dem Geiger-Müller-Zähler rechts detektiert. Der Drehwinkel des Zählrohrs ist dabei immer doppelt so groß wie des Kristalls.
Pulver
γ
α
d ∆s
Abb. 8.24: Skizzen zur Herleitung der Bragg-Gleichung (links) und Demonstration des Debye-Scher rer-Verfahrens (rechts).
8.8 Strahlenschutz
| 351
Abb. 8.25: Aufbau zur Bestimmung der Wellenlänge von Röntgenstrahlung durch Beugung an einem Kochsalzkristall (NaCl).
8.7.2.3 Debye-Scherrer-Verfahren Dasselbe Verfahren kann ebenfalls für pulverförmige Proben verwendet werden und wird dort Debye-Scherrer-Verfahren genannt. Hierbei wird die Röntgenstrahlung auf einen dünnen Behälter, der mit dem Pulver befüllt wurde, gelenkt. In einem bestimm ten Abstand dazu befindet sich eine sensitive Fotoplatte, auf die die gebeugte Strah lung nach dem Durchlaufen der Probe fällt. Da es bei den zufällig angeordneten Kris tallen immer einige gibt, für die die Bragg-Bedingung erfüllt ist, erwartet man als Er gebnis ringförmige Maxima auf der Fotoplatte. Aus den Winkelabständen der Kreise zum Zentrum lassen sich dann mit Gleichung (8.94) die relevanten Abstände im Kris tallgitter bestimmen. Umgekehrt kann man natürlich dieses Verfahren auch verwen den, um beispielsweise die unbekannte charakteristische Wellenlänge der verwende ten Röntgenstrahlung zu bestimmen, sofern die Abstände in den Kristallen im Voraus bekannt sind.
8.8 Strahlenschutz 8.8.1 Einheiten Beim Umgang mit radioaktiven Quellen sind einige Regeln zu beachten. Bevor wir diese genauer betrachten, müssen zunächst einige grundlegende Begriffe definiert werden. Eine radioaktive Quelle wird zum einen durch ihre Aktivität und zum an dern durch die Energie und Art der Strahlung klassifiziert. Je nach Beschaffenheit der Strahlung wird beim Durchqueren von menschlichem Gewebe bedingt durch den Energieverlust der Teilchen eine bestimmte Energie deponiert, welche Energiedosis D genannt wird. Diese gibt die deponierte Energie pro Masse an und wird mit der Einheit Gray (Gy) bezeichnet, wobei 1 Gy exakt 1 J/kg entspricht. Wie wir bereits gesehen ha ben, hängt die Stärke der Wechselwirkung ebenfalls von der Strahlenart ab. α-Strah lung ist beispielsweise 20-mal gefährlicher als β- oder γ-Strahlung. Daher muss die
352 | 8 Atom- & Kernphysik
Tab. 8.2: Einige ausgewählte Wichtungsfaktoren verschiedener Strahlungsarten. Strahlung
Energie
Wichtungsfaktor w R
α-Strahlung Elektronen/Positronen Photonen Neutronen Neutronen Protonen
alle alle alle < 10 keV 100 keV . . . 2 MeV > 2 MeV
20 1 1 5 20 5
Energiedosis noch mit einem einheitenlosen Wichtungsfaktor w R multipliziert wer den, um die Effekte verschiedener Strahlenarten miteinander vergleichen zu können. Die sich daraus ergebende Dosis wird daher Äquivalentdosis genannt und ist wie folgt definiert: H = wR D (8.95) Dieser Wichtungsfaktor hängt von der Strahlenart und der Energie der Strahlung ab. Tabelle 8.2 gibt einen Überblick über die Wichtungsfaktoren einiger Strahlenarten. Obwohl die Äquivalentdosis noch immer die Einheit J/kg besitzt, hat man sich 1978 darauf geeinigt, stattdessen die Einheit Sievert (Sv) zu benutzen, um Missverständ nisse zu vermeiden. Neben der Energie und der Äquivalentdosis gibt es noch die effektive Äquivalent dosis, die mit Heff bezeichnet wird und ebenfalls die Einheit Sievert besitzt. Sie ergibt sich durch die Multiplikation von H mit einem einheitenlosen Wichtungsfaktor w T für das jeweilige Gewebe, das von der Strahlung getroffen wird: Heff = w T H
(8.96)
Der Grund hierfür liegt in der Gefährlichkeit, die für das bestrahlte Gewebe besteht. Während die Schädigung der Haut oft weniger problematisch ist, können andere Stel len im menschlichen Organismus wie Keimdrüsen oder Knochenmark gefährliche Krankheiten wie Tumore hervorrufen. Werden mehrere Organe von der Strahlung getroffen, muss über alle Wichtungsfaktoren aufsummiert werden: n
Heff = ∑ w T,i H T
(8.97)
i=1
In Tabelle 8.3 sind einige Wichtungsfaktoren für verschiedene Organe angegeben. Ge messen wird die Strahlenbelastung mithilfe sogenannter Dosimeter. Im einfachsten Fall bestehen sie aus einem Gehäuse mit einem dünnen Film, der sich bei der Ein wirkung von Strahlung schwarz färbt (Filmdosimeter). Moderne Dosimeter arbeiten mit Halbleitersensoren, die beim Auftreffen eines radioaktiven Teilchens einen Strom erzeugen. Die integrierte Ladung kann umgerechnet in die Äquivalentdosis in Echt
8.8 Strahlenschutz | 353
Tab. 8.3: Beispiele für Wichtungsfaktoren von Gewebe und Organen im menschlichen Körper. Organ/Gewebe
Wichtungsfaktor w T
Keimdrüsen Rotes Knochenmark Lunge Magen Schilddrüse Haut
0,2 0,12 0,12 0,12 0,05 0,01
zeit auf einem Display dargestellt werden oder mithilfe spezieller Geräte ausgewertet werden.
8.8.2 Strahlenbelastung Natürliche Strahlung, beispielsweise durch Zerfall radioaktiver Nuklide oder kosmi sche Strahlung, ist immer vorhanden. Die mittlere Strahlenbelastung für eine Person in Europa liegt bei etwa 2 mSv pro Jahr. Diese Strahlendosis kann als ungefährlich ein gestuft werden, wobei dies immer vom Einzelfall abhängt und lediglich statistische Aussagen gemacht werden können. Zu der natürlichen Strahlenbelastung kommen noch etwa 1 bis 2 mSv Strahlenbelastung durch medizinische Untersuchung (Rönt genstrahlung) oder Höhenstrahlung bei Flugreisen hinzu. Die letale Ganzkörperdo sis, bei der ca. 50 % der exponierten Personen nach 30 Tagen sterben, liegt bei 4 Sv. Lokal und über einen längeren Zeitraum hinweg können allerdings wesentlich höhere Strahlenbelastungen ertragen werden, ohne dabei irreparablen Schaden zu nehmen. So können bei der Bestrahlung von Tumoren in dem betroffenen Gewebe Äquivalent dosen über 10 Gy erreicht werden. Während bereits ab etwa 250 mSv sich erste Verän derungen im Blutbild bemerkbar machen, tritt eine akute Strahlenkrankheit erst ab einer Dosis von etwa 1 Sv auf. Je höher die Dosis ist, desto schneller treten Symptome wie Kopfschmerzen und Übelkeit auf, die aber nach ein paar Tagen wieder verschwin den können. In der darauffolgenden Walking-Ghost-Phase, die sich über einige Tage erstrecken oder bei hohen Strahlenbelastungen auch entfallen kann, ist der Patient dann nahezu vollkommen beschwerdefrei. Anschließend kommt es zur zweiten Phase der Strahlenkrankheit, in der der Patient meistens deutlich schwerwiegendere Sym ptome wie Fieber, Haarausfall und Blutungen zeigt. Wenn der Tod nicht innerhalb der ersten 8 Wochen nach Beginn der Symptome eintritt, dann ist die Überlebens wahrscheinlichkeit des Patienten sehr hoch und die Symptome bilden sich meistens vollkommen zurück. Dennoch kann eine erhöhte Strahlenexposition immer noch zu Spätfolgen wie Krebs führen. Die Wahrscheinlichkeit dafür nimmt nahezu linear mit der effektiven Äquivalentdosis zu. Nicht zu unterschätzen sind ebenfalls durch Strah
354 | 8 Atom- & Kernphysik
leneinwirkung induzierte genetische Schäden, die zu Mutationen in nachfolgenden Generationen führen können.
8.8.3 Biologische Halbwertszeit Nimmt eine Person eine radioaktive Substanz auf, dann spielt neben der physikali ph bio eine wichtige Rolle. schen T1/2 Halbwertszeit noch die biologische Halbwertszeit T1/2 Diese gibt an, wie lange der radioaktive Stoff im Körper verbleibt, bis er auf natürli che Weise ausgeschieden wird. Die daraus resultierende effektive Halbwertszeit ergibt sich aus der Addition der Zerfallskonstanten λeff = λph + λbio
(8.98)
und Einsetzen der Beziehung aus Gleichung (8.83) zu ph
eff T1/2 =
bio T1/2 T1/2 ph
bio T1/2 + T1/2
(8.99)
und ist somit stets kleiner als die rein physikalische Halbwertszeit des jeweiligen Nu klids. Das Ergebnis ist mit der Parallelschaltung von Widerständen vergleichbar. In Abbildung 8.26 sind die noch verbleibenden Kerne als Funktion der Zeit unter Berück sichtigung der physikalischen und der biologischen Halbwertszeit am Beispiel von Strontium dargestellt. Zusätzlich dazu zeigt die dritte Kurve mit der effektiven Halb wertszeit die Kombination aus den beiden. 100 physikalisch biologisch gesamt
Kerne [%]
80 60 40 20
0
50
100
150
200
Anzahl Tage Abb. 8.26: Vergleich zwischen biologischer, physikalischer und der daraus resultierenden effektiven Halbwertszeit.
Aufgaben | 355
8.9 Zusammenfassung Nach einer kurzen historischen Zusammenfassung der Atom- und Kernphysik bis zum Beginn des 20. Jahrhunderts erfolgt unmittelbar der Einstieg in die Quantenphysik. Hier werden der Welle-Teilchen-Dualismus von Licht und Materieteilchen wie Elektro nen behandelt sowie daraus resultierende Effekte wie der fotoelektrische Effekt und das plancksche Strahlungsgesetz. Weiterhin wird herausgestellt, dass Elektronen dem Pauli-Prinzip unterliegen und im Atomverbund aufgrund ihrer Quantisierung mithilfe verschiedener Quantenzahlen beschrieben werden können. Nach einer Beschreibung des semiklassischen Bohr’schen Atommodells wird auf das deutlich genauere und auf den Gesetzen der Quantenmechanik beruhende Orbitalmodell eingegangen, mit des sen Hilfe der Aufbau des Periodensystems und die technische Anwendung in Lasern erklärt werden kann. Die Kernphysik dringt dann noch tiefer in die Materie ein und erklärt den Aufbau von Kernen sowie radioaktiven Zerfällen unter Anwendung eines Tröpfchenmodells, das trotz seiner Einfachheit relativ gute Vorhersagen liefert. Außer dem wird die Anwendung des Spins von Kernen im medizinischen und technischen Bereich erläutert. In den darauffolgenden Abschnitten wird neben der natürlichen Strahlung auch die Erzeugung künstlicher ionisierender Strahlung mithilfe von Rönt genröhren und deren Detektion mit verschiedenen Detektortypen beschrieben. Der Anwendung von Röntgenstrahlung ist heute in bildgebenden Verfahren kaum noch wegzudenken und ein genaueres Verständnis der Entstehung sowie der Wirkung auf den menschlichen Körper sehr wichtig. Die Wechselwirkung von Strahlung mit Ma terie bedingt schließlich eine kurze Einführung in den Strahlenschutz, womit dieses Kapitel abgeschlossen wird.
Aufgaben Aufg. 8.1: Heiße Kohle mit einer Temperatur von 800 °C emittiert erfahrungsgemäß viel Licht im rötlichen Bereich des Spektrums. Bei welcher Wellenlänge liegt die ma ximale Intensität? Aufg. 8.2: Grünes Licht hat eine Wellenlänge von etwa 550 nm. Welche Energie in Elektronenvolt ergibt sich daraus für ein einzelnes Photon? Aufg. 8.3: Wie groß ist die Ruheenergie eines Elektrons in Elektronenvolt? Aufg. 8.4: Wie groß ist der Bohr’sche Radius beim Wasserstoffatom? Aufg. 8.5: Welcher Zahlenwert ergibt sich für die Rydberg-Energie in Elektronenvolt? Aufg. 8.6: Welche Wellenlänge hat ein Photon, das beim Übergang des Elektrons im Wasserstoff vom 4. in den 2. Energiezustand ausgestrahlt wird?
356 | 8 Atom- & Kernphysik Aufg. 8.7: Wie groß ist der ungefähre Wert der Bindungsenergie von 62 28 Ni nach BetheWeizsäcker? Aufg. 8.8: Wie groß ist die Larmor-Frequenz des Protons in einem Wasserstoffatom bei einer Flussdichte von 1 T? Aufg. 8.9: Wie groß ist die aus der Halbwertszeit berechnete Zerfallskonstante von Strontium? Aufg. 8.10: Nach welcher Zeit sind 99,999 % der Kerne einer Strontiumquelle zerfal len? Aufg. 8.11: In einem geschlossenen Behälter befindet sich ein Gemisch aus Luft und Radon (222 Ra). Die Anfangsaktivität beträgt 500 Bq. Welche ungefähre Aktivität wird man voraussichtlich nach 10 Tagen messen? Aufg. 8.12: Die gemessene Intensität einer γ-Quelle hinter einer Bleiwand soll auf 1 % der ursprünglichen Intensität reduziert werden. Wie dick muss die Bleichschicht sein, wenn der Absorptionskoeffizient für diese Energie 0,05 1/m beträgt? Aufg. 8.13: Ein Röntgengerät verwende eine Beschleunigungsspannung von 20 kV. Wie groß ist die minimale Wellenlänge der emittierten Photonen? Aufg. 8.14: Eine Person verschlucke eine Radiumquelle mit einer Aktivität von 100 kBq. Die Energie der α-Teilchen beträgt knapp 5 MeV. Wie groß wäre die Strahlenbelastung pro Tag, wenn man davon ausgeht, dass die gesamte Energie im Magen deponiert wird? Der Einfachheit halber soll die Rate über den Tag hinweg als konstant angesehen wer den. Aufg. 8.15: Die biologische Halbwertszeit von 90 Sr im menschlichen Körper beträgt ca. 49 Jahre. Wie groß ist die daraus resultierende effektive Halbwertszeit?
Lösungen Kapitel 1 Aufg. 1.1: 23 g Aufg. 1.2: 1,431 s Aufg. 1.3: (173,0 ± 0,15) cm Aufg. 1.4: (9.310 ± 10) cm Kapitel 2 Aufg. 2.1: a) x = 2, b) x = 5 Aufg. 2.2: a) x = ±3, b) x1 = 0, x2 = −10 c) x1 = −15, x2 = −5 Aufg. 2.3: a) 1,73 m, b) 1 m Aufg. 2.4: a) 806,82, b) 0,226, c) −8,58 Aufg. 2.5: a) 2,33, b) 0,69, c) 23,6, d) 0,64 Aufg. 2.6: 37° Aufg. 2.7: (2, −1, −6) Aufg. 2.8: (2x, 5, 1) Aufg. 2.9: 5 + 3y 2 Aufg. 2.10: (0, 0, 2x − 2) Kapitel 3 Aufg. 3.1: 19,4 m/s Aufg. 3.2: 2,25 km Aufg. 3.3: 2,22 m/s2 Aufg. 3.4: 1,25 s Aufg. 3.5: 30,7 m Aufg. 3.6: a) 0,64 s, b) 51,4° Aufg. 3.7: a) 3,28 s, b) 35,23 m, c) 62,96 m Aufg. 3.8: 170 s Aufg. 3.9: 12,25 s
https://doi.org/10.1515/9783110692921-009
358 | Lösungen
Aufg. 3.10: 7,5 km/h Aufg. 3.11: 1 m/s Aufg. 3.12: 0,78 J Aufg. 3.13: 96,45 kJ Aufg. 3.14: 8,86 m/s Aufg. 3.15: 89,7 kW Aufg. 3.16: a) 98,1 N/m, b) 49,1 mJ Aufg. 3.17: 7,5 mm/s Aufg. 3.18: 28,94 N Aufg. 3.19: 20 m/s Aufg. 3.20: a) 25 km/h, b) 48,225 kJ Aufg. 3.21: 4 m/s Aufg. 3.22: 16,7 m Aufg. 3.23: 11,25 cm Aufg. 3.24: 17,5 cm Aufg. 3.25: 1177 N Aufg. 3.26: 7,89 kJ Aufg. 3.27: 1,53 m/s Aufg. 3.28: 40 U/min Aufg. 3.29: 2,9 kg m2 Aufg. 3.30: 400 N Aufg. 3.31: 47,12 kN Aufg. 3.32: 3.846 bar Aufg. 3.33: 0,22° Aufg. 3.34: 0,62° Aufg. 3.35: 1,62 N/kg Aufg. 3.36: 1,02 km/s Aufg. 3.37: 4671 km
Lösungen | 359
Kapitel 4 Aufg. 4.1: 1,75 N/m Aufg. 4.2: 2,2 s Aufg. 4.3: 1,16 s Aufg. 4.4: a) 0,0035 1/s, b) 0,033 1/s Aufg. 4.5: 40 cm Aufg. 4.6: 600 THz Aufg. 4.7: a) 201 Hz, b) 1 Hz Aufg. 4.8: 18,75 cm Aufg. 4.9: 0,36 Pa Aufg. 4.10: a) 417,3 Hz, b) 438,2 Hz Aufg. 4.11: 112,8° Aufg. 4.12: 30 cm Aufg. 4.13: 1,33 kHz Kapitel 5 Aufg. 5.1: 1,0055 ml Aufg. 5.2: 125,4 s Aufg. 5.3: 61,4 °C Aufg. 5.4: 668 J Aufg. 5.5: 33,3 cm Aufg. 5.6: 1090 kg/m3 Aufg. 5.7: 0,023 ml Aufg. 5.8: 14 mm Aufg. 5.9: 40 m/s Aufg. 5.10: 2,43 m/s Aufg. 5.11: 136,11 kN Aufg. 5.12: 1,19 mPa s Aufg. 5.13: 0,92 mPa s Aufg. 5.14: 8,25 kN
360 | Lösungen
Aufg. 5.15: 24,37 l Aufg. 5.16: 539,2 m/s Aufg. 5.17: (a) 12,465 J/mol, (b) 20,779 J/mol Aufg. 5.18: 300 m Aufg. 5.19: 463 °C Aufg. 5.20: 6,51 Aufg. 5.21: 1,29 MPa Aufg. 5.22: 833 cm2 Aufg. 5.23: 2,78 kW Kapitel 6 Aufg. 6.1: 29,3 cm Aufg. 6.2: 39 Aufg. 6.3: 13 ⋅ 106 m/s Aufg. 6.4: 6,25 ⋅ 1016 Aufg. 6.5: 0,26 mA Aufg. 6.6: 63,7 mΩ Aufg. 6.7: 0,42 % Aufg. 6.8: 45,5 mS Aufg. 6.9: 1 W Aufg. 6.10: 44 Ω Aufg. 6.11: 35 Euro Aufg. 6.12: −7 A Aufg. 6.13: −7 V Aufg. 6.14: 8,43 h Aufg. 6.15: 10 μT Aufg. 6.16: 8,6 mN Aufg. 6.17: 31,4 cm Aufg. 6.18: 1,19 mV Aufg. 6.19: 200 μV
Lösungen | 361
Aufg. 6.20: 250 μV Aufg. 6.21: 1,51 V Aufg. 6.22: 63 Ω Aufg. 6.23: 62,17 s Aufg. 6.24: 1,6 kJ Aufg. 6.25: 11,8 mV Aufg. 6.26: 0,2 s Aufg. 6.27: 250 mJ Aufg. 6.28: 75 Ω Aufg. 6.29: a) 120 Ω, b) 243 nF, c) 390 mH Aufg. 6.30: a) 16,7 Ω, b) 60,25 Ω, c) 21,8 mH Aufg. 6.31: 65,3 kΩ Aufg. 6.32: 197,4 mV Aufg. 6.33: 325,27 V Aufg. 6.34: 314,15 mA Aufg. 6.35: 159,15 mA Aufg. 6.36: 664,22 Ω Aufg. 6.37: 30,61 Ω Aufg. 6.38: a) 500, b) 460 mA Aufg. 6.39: 503,3 Hz Kapitel 7 Aufg. 7.1: 14,9° Aufg. 7.2: 48,75° Aufg. 7.3: 88 % Aufg. 7.4: 1,58° Aufg. 7.5: 11 % Aufg. 7.6: a) 4,25 m, b) 1,05 mm Aufg. 7.7: 3,19 cm Aufg. 7.8: a) 55 mm, b) 1,7 cm
362 | Lösungen
Aufg. 7.9: 17,5 dpt Aufg. 7.10: 10 Aufg. 7.11: 750 Aufg. 7.12: 100 Aufg. 7.13: 15,8° Aufg. 7.14: 274 Aufg. 7.15: 19,2° Aufg. 7.16: 0,72 μm Aufg. 7.17: 32,58° Aufg. 7.18: 51,2 % Kapitel 8 Aufg. 8.1: 5,49 μm Aufg. 8.2: 2,26 eV Aufg. 8.3: 511 keV Aufg. 8.4: 5,3 ⋅ 10−9 cm Aufg. 8.5: 13,6 eV Aufg. 8.6: 486 nm Aufg. 8.7: 8,8 MeV Aufg. 8.8: 42,5 MHz Aufg. 8.9: 0,0247 1/s Aufg. 8.10: 466 a Aufg. 8.11: 81,5 Bq Aufg. 8.12: 90,3 m Aufg. 8.13: 62,1 pm Aufg. 8.14: 1,3 mSv/d Aufg. 8.15: 17,86 a
Stichwortverzeichnis Abbildung – reell 279 – virtuell 277 Abbildungsgleichung 279 Abbildungsmaßstab 273 Aberration – chromatisch 288 – sphärisch 288 Ableitung 29 Addition 14 Adhäsion 144 Adiabatengleichung 164 Adiabatenindex 164 adiabatisch 163 Aggregatzustand 130 Akkommodation 281 A-Mode 124 Anode 197 Aphel 92 Äquipotenzialfläche 180 archimedisches Prinzip 141 Arithmetik 13 Assoziativgesetz 14 Astigmatismus 289 Atomare Masseneinheit 6 Auflösungsvermögen – Gitter 295 – optische Geräte 299 Auftrieb 141 Avogadro-Konstante 6 Bahngeschwindigkeit 67 barometrische Höhenformel 158 Baryzentrum 93 Basis 18 Basisvektor 40 Beleuchtungsstärke 258 Bell 119 Beschleunigung 49 Beschleunigungsspannung 346 Besetzungszahlinversion 323 Bessel-Verfahren 276 Bethe-Bloch-Formel 337 Bethe-Weizsäcker-Formel 325 Beuger 77 Beugung 290 https://doi.org/10.1515/9783110692921-010
Bildleiter 263 Binnendruck 161 B-Mode 125 Bogenmaß 67 Boltzmann-Faktor 159 Bragg-Peak 338 Brechkraft 282 Brechung 260 Brewster-Winkel 269 Bruch 16 – erweitern 16 – kürzen 16 – Nenner 16 – Zähler 16 C14-Datierung 344 Computertomografie 110, 349 Definitionsbereich 24 deutliche Sehweite 285 Dezibel 119 Dichteanomalie 132 Dielektrikum 183 Dielektrizitätszahl 184 Differenzial 29 Differenzialoperator 29 Differenzialquotient 29 Dipol – induziert 183 Dispersion 270 Dissoziation 197 Distributivgesetz 15 Divergenz 44 Division 15 Doppelbruch 17 Doppelspalt 292 Dosimeter 352 Dotierung 226 Drehmoment 76 Drehstrom 235 Drei-Finger-Regel 208 Dreiphasenwechselstrom 235 Driftgeschwindigkeit 189 Druck 87 – osmotisch 171 Dynode 342
364 | Stichwortverzeichnis
Echogenität 125 Echokardiografie 124 Effektivspannung 236 Effektivstrom 236 Einheitensystem 4 Einheitsvektor 42 Elastizitätsmodul 86 elektrische Spannung 186 Elektrizität – negativ 179 – positiv 179 Elektrolyt 197 Emission – induziert 323 – spontan 323 Emissionsgrad 174 Ende – fest 110 – offen 110 Endoskopie 263 Energie 61 – innere 156 – kinetisch 63 – potenziell 62 Erythrozyten 126 Euler’sche Zahl 18 Exponent 18 Extinktionskoeffizient 302 faradayscher Käfig 182 Farbmischung – additiv 256 – subtraktiv 257 Federkonstante 66 Federkraftmesser 66 Fehler – absolut 9 – Einzelmessung 8 – Mittelwert 9 – relativ 9 – statistisch 7 – systematisch 7 Feldkonstante – elektrisch 184 – magnetisch 204 Feldlinien 180 Fernfeld 246 Flächensatz 94 Fotomultiplier 342
Fotovoltaik 228 Fourier-Reihe 107 Fourier-Transformation 109 Funktion 24 galvanische Zelle 199 Galvanometer 215 Gangunterschied 292 Gas – ideal 152 – real 161 Gauß’sche Näherung 273 Gaußverteilung 10 Generation 193 Geschwindigkeit 47 – mittlere 160 Gesetz von Malus 264 Glasfasern 263 Gleichstrom 188 Gleichung 22 – quadratisch 22 Gleichungssystem 23 – überbestimmt 23 – unterbestimmt 23 Gleichverteilungssatz 156 Gleitmodul 88 Glockenkurve 10 Gradient 44 Gravitationskonstante 89 Grenzwert 29 Größengleichung 3 Grundschwingung 116 Grundton 116 Halbleiter 189 Hall-Effekt 210 Hämoglobin 65 Hauptebene 276 Hebelgesetz 77 Heizspannung 346 Hörgrenze 118 Hornhaut 255 Hörschall 118 Hörschwelle 119 hydrostatischer Druck 139 Hysterese 206 ideale Gasgleichung 154 Induktivität 223
Stichwortverzeichnis
Influenz 182 Infraschall 118 Inkompressibilität 146 Integral – bestimmt 35 – unbestimmt 35 Interferenz 114 Interferenzmuster 290 Ionisation 319 irreversibel 164 isobar 153 isochor 153 Isolator 183, 189 isotherm 152 Isotop 6, 322 Kältemaschine 167 Kapazität 217 Kapillare 145 Kapillarität 145 Kathode 197 Kehrwert 15, 17 Kernfusion 327 Kohärenz 291 – räumlich 291 – zeitlich 291 Kohärenzfläche 291 Kohärenzvolumen 291 Kohäsion 144 Kohäsionsdruck 161 Koma 289 Kommutativgesetz 14 Kompressibilität 87 Kompression 87 Kompressionsmodul 87 Konstante 24 Konvektion 174 Kraft 58 – Coriolis- 73 – Hangabtriebs- 59 – Kern- 324 – Normal- 59 – Rückstell- 65 – Schein- 73 – starke 324 – Trägheit- 73 – Van-der-Waals- 144 – Zentrifugal- 73 – Zentripetal- 68
|
Kräfteparallelogramm 59 Kreiszahl 14 Kristallografie 350 Ladung – frei 182 Lageenergie 62 laminare Strömung 145 Larmor-Frequenz 330 Laser 323 Leiter 189 Lenz’sche Regel 214 Lichtstärke 258 Limes 29 Linse 275 – dick 276 – dünn 275 Linsengleichung 275 Linsensystem 281 Loch 193, 226 Lochkamera 272 Logarithmus 19 – natürlich 19 Log-Stufen 20 Longitudinalwellen 118 Loschmidt-Konstante 6 Luftwiderstand 85 magnetische Flussdichte 203 magnetischer Fluss 212 Magnetismus – Dia- 205 – Ferro- 206 – Para- 205 Massendefekt 326 Massenkonstante 6 Maßzahl 4 Maxima – Haupt- 294 – Neben- 295 Maxwell-Boltzmann-Verteilung 160 Maxwell’sche Gerade 162 Maxwell’scher Verschiebungsstrom 222 Mittelwert 7 Modendichte 309 Mol 6 molare Masse 6 Molmasse 6
365
366 | Stichwortverzeichnis
Multimeter 216 Multiplikation 15 Nabla-Operator 44 Netzhaut 255 Neutralleiter 235 Newtonringe 302 Nordpol 203 Normierung 42 Nukleon 6 Nullleiter 235 Oberflächenspannung 142 Oberflächenterm 325 Oberschwingung 116 Oberton 116 Objektiv 286 ohmscher Widerstand 190 Okular 286 optische Aktivität 264 – linksdrehend 265 – rechtsdrehend 265 optische Weglänge 262 Ordnungszahl 6, 322 Ortsfaktor 58 Osmose 171 Paarungsterm 326 Paradoxon – hydrodynamisch 149 – hydrostatisch 139 Parallelschaltung 231 paraxiale Strahlen 273 Partialdruck 133 Pascal’sches Gesetz 139 Perihel 92 Periodensystem 322 Permittivität 185 Phase 130 Phasenübergang 131 Physik 1 Physikalische Größe 3 Piezokristall 124 plancksches Strahlungsgesetz 308 plancksches Wirkungsquantum 310, 313 Polarimeter 265 Polarisation 183 – elliptisch 263
– linear 263 – zirkular 263 Polarisationsgrad 269 Potenz 17 Potenzial – elektrisch 186 Potenzreihe 107 Potenzwert 18 Präzession 330 Primärzelle 200 Puls-Echo-Verfahren 124 Pulsoxymetrie 303 pumpen 322 Pyrometer 175 Quantenzahl – Drehimpuls 316 – Haupt- 321 Querkontraktion 86 Radialbeschleunigung 69 Radiokarbonmethode 344 Radiopharmakon 343 Rechteckfunktion 108 Reibung 83 – Gleit- 84 – Haft- 84 – Roll- 84 – Stokes 150 Reihenschaltung 230 Rekombination 193, 227 Relais 229 Remanenz 206 reversibel 164 Röntgenstrahlen 249 Rotation 45, 67 Rydberg-Energie 319 Sammellinse 276 Scherspannung 87 Schichtmodell 149 schnelle Fourier-Transformation 109 Schubmodul 88 Schutzerdung 235 Schwebung 113 Schweredruck 139 Schwerpunk 74 Schwimmbedingung 141
Stichwortverzeichnis
Schwingung – stationär 115 Seebeck-Effekt 202 Sehwinkel 284 Sekante 29 Sekundärzelle 201 Selbstinduktion 224 Semipermeabilität 172 Skalarprodukt 40 Snellius’sche Brechungsgesetz 261 Solarzelle 228 Sonografie 124 – Doppler- 125 Spannungsreihe 200 Spannungsteiler 191 spezifische Oberflächenenergie 142 spezifischer Drehwinkel 265 Stabsichtigkeit 289 Stammfunktion 35 Standardabweichung 8 Stempeldruck 147 Stoffmenge 6 Stokes’scher Satz 213 Strahlensatz 272 Strahlung – ionisierend 339 Strecker 77 Stromrichtung 188 Subtraktion 15 Südpol 203 Suess-Effekt 345 Summe 14 Superpositionsprinzip 58 Symmetrieterm 325 Synovia 83 Système International 4 Tangente 29 Teilchenbeschleuniger 338 Teleskop 287 Temperaturkoeffizient 192 Tenside 142 thermoelektrische Spannung 202 Thermoelement 202 Torsion 88 Torsionsspannung 89 Trägheitsmoment 78 Transistor 228 – Basis 228
|
– Emitter 229 – Kollektor 229 Translation 47 Treppenfunktion 108 Tumor 352 Ultraschall 118 Ultraviolettkatastrophe 310 Umkehrosmose 172 Umlaufzeit 68 Van-der-Waals – Gleichung 161 Van-’t-Hoff-Faktor 171 Variable 24 Vektoraddition 39 Verformung – elastisch 65 – plastisch 86 Viskosität 149 V-Lambda-Kurve 256 Volumenstrom 146 Volumenterm 325 Vorzeichen 14 Wärme – latent 137 Wärmebildkamera 175 Wärmekraftmaschine 164 Wärmetod 168 Wehneltzylinder 347 Weiß’sche Bezirke 206 Welle – stehend 115 Wheatstone’sche Brückenschaltung 216 Widerstandsbeiwert 85 Wienfilter 209 Wien’sches Verschiebungsgesetz 312 Young’sche Gleichung 144 Zahl – ganz 14 – natürlich 13 – rational 14 – reell 14 Zeitkonstante 220 Zerstreuungslinse 277 Zugspannung 86 Zwischenbild 281
367