Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting (SpringerBriefs in Applied Sciences and Technology) 3031510453, 9783031510458
This book presents recent research in the field of piezoelectric vibration energy harvesting in which intentionally desi
168 10 5MB
English Pages 143 [141] Year 2024
Preface
Contents
1 State-of-the-Art
1.1 Micro-Electro-Mechanical-Systems (MEMS)
1.2 Energy Harvesting
1.3 Piezoelectric Vibration Energy Harvesting (PVEH)
1.3.1 Linear Systems
1.3.2 Nonlinear Systems
References
2 Physics Fundamentals
2.1 Piezoelectricity
2.1.1 Phenomenological Aspects
2.1.2 Mathematical Modeling
2.2 Magnetostatics
2.2.1 Phenomenological Aspects
2.2.2 Mathematical Modelling
References
3 Piezoelectric Vibration Energy Harvesters (PVEH)
3.1 Introduction
3.2 Linear Theories
3.2.1 Classical Euler-Bernoulli
3.2.2 Modified Euler-Bernoulli Beam Theory
3.3 Nonlinear Nonconservative Electroelastic Model
References
4 The Magnetic Force
4.1 Introduction
4.2 Modeling
4.2.1 Analytical Formulas
4.2.2 Finite Element-Based Numerical Solution
4.2.3 Setup for the Experimental Study
4.2.4 Comparison of Different Approaches
References
5 PVEH and Magnetic Interaction
5.1 Coupled-Oscillators Based Mechanism
5.1.1 Numerical Simulations
5.1.2 Remarks
5.2 Free-Fall Based Interaction
5.2.1 Introduction
5.2.2 Numerical Simulations
References
6 Hybrid-Broadband Energy Harvester (HEH): Magnetic Plucking and Indirect Impacts
6.1 Introduction and Motivations
6.2 Description, Design and Fabrication
6.3 Experimental Study
References
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
7.1 Motivations
7.2 Preliminary Investigations
7.2.1 Experimental and Numerical Investigation
7.2.2 Remarks and Subsequent Step
7.3 Inherent Nonlinearities
7.3.1 Implementation of the Nonlinear Nonconservative Electroelastic Model
7.3.2 Observing Material Inherent Nonlinearities
7.3.3 Discussion of the Results
7.4 Magnetic Plucking
7.4.1 Experimental Parametric Analysis
References
8 Improved Magnetic Interaction for Frequency Up-Conversion
8.1 Introduction and Motivations
8.2 Computational Studies on Shielded Permanent Magnets
8.2.1 Results for the Case with Two Shielded Magnets with Hard Ferromagnetic Material
8.2.2 Results for the Case with One Shielded Magnet with Hard Ferromagnetic Material
8.3 Experimental Evidence of the Phenomenon
8.4 Application to Vibration Energy Harvesting
References
Appendix Conclusions
Index
Recommend Papers





![Piezoelectric Technology: Materials and Applications for Green Energy Harvesting [1 ed.]
1032329068, 9781032329062](https://ebin.pub/img/200x200/piezoelectric-technology-materials-and-applications-for-green-energy-harvesting-1nbsped-1032329068-9781032329062.jpg)




- Author / Uploaded
- Michele Rosso
File loading please wait...
Citation preview
SpringerBriefs in Applied Sciences and Technology
PoliMI SpringerBriefs Michele Rosso
Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting
SpringerBriefs in Applied Sciences and Technology
PoliMI SpringerBriefs Series Editors Barbara Pernici, DEIB, Politecnico di Milano, Milano, Italy Stefano Della Torre, DABC, Politecnico di Milano, Milano, Italy Bianca M. Colosimo, DMEC, Politecnico di Milano, Milano, Italy Tiziano Faravelli, DCHEM, Politecnico di Milano, Milano, Italy Roberto Paolucci, DICA, Politecnico di Milano, Milano, Italy Silvia Piardi, Design, Politecnico di Milano, Milano, Italy Gabriele Pasqui , DASTU, Politecnico di Milano, Milano, Italy
Springer, in cooperation with Politecnico di Milano, publishes the PoliMI SpringerBriefs, concise summaries of cutting-edge research and practical applications across a wide spectrum of fields. Featuring compact volumes of 50 to 125 (150 as a maximum) pages, the series covers a range of contents from professional to academic in the following research areas carried out at Politecnico: • • • • • • • • • • • • • • • •
Aerospace Engineering Bioengineering Electrical Engineering Energy and Nuclear Science and Technology Environmental and Infrastructure Engineering Industrial Chemistry and Chemical Engineering Information Technology Management, Economics and Industrial Engineering Materials Engineering Mathematical Models and Methods in Engineering Mechanical Engineering Structural Seismic and Geotechnical Engineering Built Environment and Construction Engineering Physics Design and Technologies Urban Planning, Design, and Policy
Michele Rosso
Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting
Michele Rosso DICA Politecnico di Milano Milan, Italy
ISSN 2191-530X ISSN 2191-5318 (electronic) SpringerBriefs in Applied Sciences and Technology ISSN 2282-2577 ISSN 2282-2585 (electronic) PoliMI SpringerBriefs ISBN 978-3-031-51045-8 ISBN 978-3-031-51046-5 (eBook) https://doi.org/10.1007/978-3-031-51046-5 © The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 This work is subject to copyright. All rights are solely and exclusively licensed by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. The use of general descriptive names, registered names, trademarks, service marks, etc. in this publication does not imply, even in the absence of a specific statement, that such names are exempt from the relevant protective laws and regulations and therefore free for general use. The publisher, the authors, and the editors are safe to assume that the advice and information in this book are believed to be true and accurate at the date of publication. Neither the publisher nor the authors or the editors give a warranty, expressed or implied, with respect to the material contained herein or for any errors or omissions that may have been made. The publisher remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. This Springer imprint is published by the registered company Springer Nature Switzerland AG The registered company address is: Gewerbestrasse 11, 6330 Cham, Switzerland Paper in this product is recyclable.
Preface
Our times are characterized by the ever-increasing need to have interconnected networks of smart objects that exchange data between them. This concept takes the name Internet of Things (IoT ). The purposes of having interconnected networks are mainly related to observe the environment around us which, technically, takes the name of monitoring and it is done through sensors. Often, such observation is then exploited to perform further operations through actuators. The application of the concept is very huge and covers different fields, such as monitoring of medical, structural, and infrastructural parameters or machinery control. The last few years have seen the inclusion of monitoring systems even in the field of recreation activities and sports, given the spread of smart technology goods in consumer markets (smartphones, smartwatches and so on). The concept of widespread monitoring is creating a second technological revolution that modified the previously discussed neologism with the new “Internet of Everything” (IoE). This last one involves connecting things with people, processes, and data to increase the potential of individual and economic realities. The widespread deployment of sensor networks encloses two inherently environmental issues, on the one hand, monitoring sensors must not be invasive for functional and also aesthetic reasons. On the other hand, these must not be highly impactful from a consumption perspective, also for economical reasons. Hopefully, such sensors should even be energy autonomous. This would also avoid the frequent presence of humans at the network for maintenance purposes, thus limiting the risk in remote and poorly accessible locations. The first issue can be effectively overcome with Micro-Electro-Mechanical-Systems (MEMS) that exploit the silicon technology to equip electrical and mechanical components at small scale on the same object to perform a huge variety of functions. The problem of energy consumption can be solved through the concept of energy harvesting. Energy harvesting refers to the recovery of energy from environmental forms (solar, thermal, kinetic, chemical) and its conversion into electrical energy to power a utility. In the last years, the advances in electronics led to dramatic reduction in power consumption of sensors making possible the ambition to charge them directly on-chip, thus without needs of batteries and wiring. Among different possibilities of energy harvesting, one lies in the exploitation of kinetic energy from mechanical vibrations. This strategy v
vi
Preface
seems promising and received great attention since mid 90s. Such a fascinating topic includes many research challenges both on the scientific and the technological side. Different scientific fields converge to study the problem such as mechanics, material science, and applied mathematics. The technological research is mainly concerned with the feasibility of these systems using the existing microfabrication processes to avoid additional costs for the industries. This book fits into the scientific aspects of this context. In Chap. 1, the reader is given an overview of MEMS technology. Then, the emphasis of the work is on the vibration energy harvesting via piezoelectric energy transduction mechanism. The focus is mainly on the specific theme of the frequency up-conversion (FuC) with permanent magnets (PMs) involving nonlinear dynamics concepts. This technique has been the subject of study in the last 15 years and there are still aspects to be explored in greater detail, especially in relation to its performance under different dynamic inputs and the modeling of the magnetic interaction. This latter plays a crucial role in evaluating the response of harvesters. Even if the studies presented in this work are not directly at the MEMS the concepts can be transferred to miniaturized devices. Chapter 2 provides the basic notions of piezoelectricity and magnetostatics. Chapters 3 and 4 apply the notions of Chap. 2 to develop modeling for energy harvesters and magnetic interaction, respectively. In Chaps. 5–8, the tools presented are then applied for the study and design of innovative devices, both at the theoretical-numerical and the experimental scale. Chapter 7 also delves into some limits of the frequency up-conversion dynamics with permanent magnets, and inherent nonlinearities of the piezoelectric material are also observed and studied. In the Chap. 8, a novel technique is proposed to improve up-conversion in cases in which it would otherwise not very efficient due to the low velocity input. The author’s effort was to try to use a balanced approach between theory, simulation, and experimentation. The incremental style aims to make the book also usable for doctoral students interested in modeling piezoelectric structures. The first four Chapters would like to give a clear framework of the current analytical tools with the hope of giving the reader a method to develop models according to the needs. This book has been written single-handedly, and probably contains some mistakes, and misses certain contributions. To all distinguished colleagues and collaborators, I wish to present my apologies for any omissions. The results presented in this book would not have been possible without the support and constant trust of some people whom I want to deeply thank. I would like to thank Profs. Raffaele Ardito and Alberto Corigliano of the Politecnico di Milano (Milan, Italy), and Prof. Alper Erturk of the Georgia Institute of Technology (Atlanta, USA). These three people played a key role in my approach to the research, and they also represent mentors on a human level. I am very glad to have met them. I would also like to thank Dr. Eetu Kohtanen, a great colleague. Chapter 7 is the result of intense collaborative work that we carried out side by side together at the Smart Structures and Dynamical Systems Laboratory (Georgia Tech). Milan, Italy
Michele Rosso
Contents
1 State-of-the-Art . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1 Micro-Electro-Mechanical-Systems (MEMS) . . . . . . . . . . . . . . . . . . . 1.2 Energy Harvesting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Piezoelectric Vibration Energy Harvesting (PVEH) . . . . . . . . . . . . . . 1.3.1 Linear Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3.2 Nonlinear Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 1 3 5 6 10 18
2 Physics Fundamentals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1 Piezoelectricity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1.1 Phenomenological Aspects . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1.2 Mathematical Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 Magnetostatics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.1 Phenomenological Aspects . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.2 Mathematical Modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27 27 27 30 37 37 40 42
3 Piezoelectric Vibration Energy Harvesters (PVEH) . . . . . . . . . . . . . . . . 3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Linear Theories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.1 Classical Euler-Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.2 Modified Euler-Bernoulli Beam Theory . . . . . . . . . . . . . . . . . 3.3 Nonlinear Nonconservative Electroelastic Model . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45 45 46 47 56 58 62
4 The Magnetic Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.1 Analytical Formulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.2 Finite Element-Based Numerical Solution . . . . . . . . . . . . . . .
63 63 63 64 67
vii
viii
Contents
4.2.3 Setup for the Experimental Study . . . . . . . . . . . . . . . . . . . . . . . 4.2.4 Comparison of Different Approaches . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68 69 72
5 PVEH and Magnetic Interaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1 Coupled-Oscillators Based Mechanism . . . . . . . . . . . . . . . . . . . . . . . . 5.1.1 Numerical Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.2 Remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2 Free-Fall Based Interaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2.2 Numerical Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75 75 77 81 82 82 84 90
6 Hybrid-Broadband Energy Harvester (HEH): Magnetic Plucking and Indirect Impacts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91 6.1 Introduction and Motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91 6.2 Description, Design and Fabrication . . . . . . . . . . . . . . . . . . . . . . . . . . . 91 6.3 Experimental Study . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95 References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100 7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1 Motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2 Preliminary Investigations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2.1 Experimental and Numerical Investigation . . . . . . . . . . . . . . . 7.2.2 Remarks and Subsequent Step . . . . . . . . . . . . . . . . . . . . . . . . . 7.3 Inherent Nonlinearities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.1 Implementation of the Nonlinear Nonconservative Electroelastic Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.2 Observing Material Inherent Nonlinearities . . . . . . . . . . . . . . 7.3.3 Discussion of the Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.4 Magnetic Plucking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.4.1 Experimental Parametric Analysis . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Improved Magnetic Interaction for Frequency Up-Conversion . . . . . . 8.1 Introduction and Motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.2 Computational Studies on Shielded Permanent Magnets . . . . . . . . . . 8.2.1 Results for the Case with Two Shielded Magnets with Hard Ferromagnetic Material . . . . . . . . . . . . . . . . . . . . . . 8.2.2 Results for the Case with One Shielded Magnet with Hard Ferromagnetic Material . . . . . . . . . . . . . . . . . . . . . .
101 101 102 103 106 107 107 109 110 114 117 119 121 121 123 123 125
Contents
ix
8.3 Experimental Evidence of the Phenomenon . . . . . . . . . . . . . . . . . . . . 126 8.4 Application to Vibration Energy Harvesting . . . . . . . . . . . . . . . . . . . . 126 References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131 Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Chapter 1
State-of-the-Art
This chapter introduces the reader to the topic. The technology of the Micro-Electro-Mechanical-System is briefly recalled from the historical, economic and technological perspectives. Then, the concept of energy harvesting is described by mentioning various possibilities of scavenging, and transduction mechanisms. The chapter is then focused on the mechanical vibrations energy harvesting by means of piezoelectric materials. A clear division in the description is given between linear and nonlinear devices. For each category historic devices are presented to highlight the scientific and technological progress. Some aspects of electronic circuitry are finally briefly discussed.
1.1 Micro-Electro-Mechanical-Systems (MEMS) Micro-Electro-Mechanical-Systems (MEMS) are miniaturized objects designed to have the capability to interact with their surroundings [1]. The name MEMS is more common in the United States, in Europe they are often simply called microsystems [2, 3]. Historically, their conceptual birth is attributed to the U.S. physicist Richard Feynman in his lecture “There’s Plenty of Room at the Bottom” taught at California Institute of Technology in 1959 [4]. Practically speaking, the birth of MEMS is attributed instead to Nathanson et al. [5] with the invention of the resonant gate transistor in 1967 at Westinghouse Research Laboratory. According to many researchers [2, 6–8] the easiest way to understand what MEMS are in detail is to analyze the words that make up the acronym. Micro indicates the size of objects that are therefore submillimeter scale, like the ones represented in Fig. 1.1. Electro means that within these complex systems there are electrical or electronic components. Mechanical means that the system works on the basis of mechanical principles due to the presence of structural components. System is a fundamental word for these devices. It means that the various components are not independent but they interact with each © The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5_1
1
2
1 State-of-the-Art
Fig. 1.1 Left: example of a torsional ratcheting actuator (TRA) at MEMS scale, from [9] with Courtesy of Sandia National Laboratories, SUMMiT™ Technologies, www.sandia.gov/mstc, right: zoomed view of the TRA (top) from [9] and MEMS commercial speaker in comparison to one dime (bottom), from [10]
other by creating or observing complex phenomena to perform a predefined function. Since they are systems, their behavior is complex, fascinating, and multiphysics. The typical MEMS devices are accelerometers, gyroscopes, pressure sensors, gas sensors, ink jet printer heads, microphones, magnetometers, actuators (see Fig. 1.1), speakers, micropumps, ultrasound transducers, radio frequency (RF) switches, optical switches [11]. These objects are integrating part of all the technological consumer goods that surround us. Industry specialists say the impact of the COVID 19 pandemic was not negative as initially thought [12]. From 2020 to 2026 a compound annual growth rate (CAGR) of 7.2% is expected. The MEMS microfabrication process is based on that of integrated circuits (IC) [14]. In particular, the first MEMS built on the basis of the IC process dates back to 1979 and it was an accelerometer by Roylance and Angell [15]. The polysilicon has been introduced as the main structural component in MEMS starting in the mid 1980’s by researchers at University of California Berkeley [16]. The preponderance of using polysilicon is due to its compatibility with the IC process, and its mechanical properties are controllable and reproducible with very narrow error margin. The starting point of the microfabrication of MEMS is a monocristalline silicon substrate called wafer, typically measuring 200–400 .µm thick. Nowadays, for the industries with high volume of business, the wafer is a flat disc with a diameter of 8 inch (i.e. 20.32 cm) or, recently, 12 inch [17]. On the wafer, various layers of such kind of metals or silicon-based layers (e.g. polycristalline silicon) are deposited with a specific function. After the deposition, a fundamental step is the lithography process in which some parts of the stratification are selectively eliminated by means of
1.2 Energy Harvesting
3
a chemo-physical process. Basically, a thin film of photosensitive material, called photoresist, is deposited by means of spinning technique. Then, a transparent plate, called mask, with selective (chosen) opaque regions is put closely to the wafer. At that point the Ultraviolet light (UV) is passed trough the mask. In case of the so called negative resist, the regions of the photoresist in contact with UV light hardens and becomes less soluble. The reverse occurs in the case of positive resist. The more soluble region is then removed through chemical reactions. It is then possible to remove other material from the substrate with the so called etching phase (or bulk micromachining process). The latter phase can be made by means of chemical or physical techniques, for details see [7]. In this way it is possible to create suspendend structures in the form of beams or plates. The selective manipulation of where things happens on the wafer is the core of MEMS technology production. The description above is of general validity for the MEMS industry process even if it could change in some detail depending on the manufacturer.
1.2 Energy Harvesting The term “Energy harvesting”, refers to the process by which energy wasted in the environment is captured or harvested and converted into a form of energy useful for human consumption, such as electricity. Energy harvesting (EH) processes are in general characterized by low environmental pollution. Humans always sought forms of energy recovering, e.g. with the invention of wind or water mills. Energy is found in many forms in the environment around us, such as solar, thermal in case of proximity to a heat source or electromagnetic in case of closeness to inductors of electrical circuits, radio or television signals. Finally, mechanical energy in the form of vibrations. The causes of vibrations can be various, such as accelerations or movements of the human body, vibrations induced by the wind or operation of machines, and impulses of different kinds. This book is focused on Vibration energy harvesting, also known as vibration-based energy harvesting (VEH), that has received a lot of attention from researchers over the last three decades. As specified in the preface, the ultimate goal of the EH technology is to power small electronic devices to reduce or eliminate the costs of electrochemical batteries. As it will be shown in this chapter, the research on VEH is not only concerning very small devices but also objects at the so-called mesoscale (i.e. typical dimension of centimeters). However, due to the progress of the low-power electronics also very small devices that can recover an amount of power in the range 10–100 .µm are of interest for researchers [18]. The early work on vibration energy harvesting with focus on microsystems is attributed to Williams and Yates with the paper Analysis of micro-electric generator for microsystems dated 1996 [19]. In that work, a prototype using bulk micromachining technology is created which converts energy through an electromagnetic transducer. However, it is specified that the principle is valid for other conversion mechanisms. The principles of energy transduction in VEH are basically three: electromagnetic (or inductive), electrostatic (or capacitive), and piezoelectric. Electromagnetic transduction results from the relative motion of an electrical conductor in a magnetic field, while the capacitive
4
1 State-of-the-Art
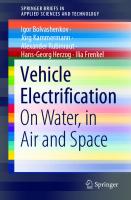
Fig. 1.2 Plot of power density versus voltage for different power supply strategies, from [27]
mechanism is due to the relative motions of two conductors separated via dielectric material. Piezoelectric effect is due to the spontaneous separation of charge within certain crystal structures under the right conditions producing an electric dipole [20], the result is that they can physically deform in the presence of an electric field, or conversely, produce an electrical potential difference due to charge separation when mechanically deformed. These mechanisms are accompanied by magnetostriction [21–23] and the use of electroactive polymers [24, 25]. As extensively explained by Erturk and Inman [26] and as can be seen even today by analysing the literature, piezoelectric transduction has received more attention over the past twenty five years. The reason can be easily understood by considering in Fig. 1.2 the famous plot drawn up by Cook-Chennault et al. in 2008 [27], which represents the power density, i.e. the electrical power generated per unit volume of the device versus the operating voltage. As can be seen, piezoelectrics intersect with the operating domain of lithium/lithium ion devices. Furthermore, they give good power output for a large range of electrical voltages. Even if dated (2008) the graph retains its importance and significance. Piezoelectric generators have good inherent transduction capacity and they preserve the efficiency even at small scale [28]. In contrast to piezo solutions, electromagnetic is more complex to realize (e.g. coil assembly in limited space) with wafer scale system and they work at low voltages (less than 1 V [29]). The electrostatic solutions are not complex to realize even at MEMS scale ([30–33]) but they require an initial polarizing voltage or charge as specified by Beeby et al. [29]. Anyway this
1.3 Piezoelectric Vibration Energy Harvesting (PVEH)
5
is not an issue in applications in which a generator charges the battery, as this can be also used to provide the necessary initial excitation level. Electrostatic generators can utilize electrets to provide the initial charge and these are capable of storing charge for many years. The output impedance of the devices is often very high, making them less suitable as power supplies. Also the output voltage is relatively high (.> 100 V) and often results in a limited current supply leading to intrusive electronic circuit to manage the issue. Although particularly promising, it is also worth noting the disadvantages of piezoelectric crystals. They suffer from age, are particularly brittle [34, 35] and prone to degrating [36], and to charge leakage [37, 38].
1.3 Piezoelectric Vibration Energy Harvesting (PVEH) The typical PVEH is a layered cantilever beam or plate. In general it is equipped with one or two layers of active (i.e. piezoelectric) material fixed on a structural layer made of semiconductor material such as silicon or metal. In case of one piezoelectric layer the harvester is named unimorph and bimorph in the case of two piezoelectric layers. In that case the layers can be electrically connected in series or parallel. Figure 1.3 shows the described structure. The basic working principle follows: the clamp of the structure is excited with an external signal of acceleration (i.e. environmental vibration), and due to this input the structure vibrates. However, the cantilever scheme is not the only one widely used, especially in the applicative field. Anton et al. installed piezoelectric patches on the wings of an unmanned aerial veichle [39–41] and also in the biomedical field to monitor in vivo the knee prostheses [42, 43]. Because of the multiphysics nature of the problem that will be deeply described in Chap. 2, the strain deformation energy caused by the vibration can be converted into electrical energy by means of piezoelectric material. To do that an electric circuit is connected to the structure (resistive in Fig. 1.3). The described system is capable to scavenge a good amount of energy (i.e. suitable for low-power electronics) only in case of high dynamic amplification. In case of harmonic forcing function (widely used in testing if one looks at the literature), it means near the resonance condition (i.e. frequency of the input very close to the frequency of the harvester). An added tip mass can be used to match a specific resonant frequency, as
Fig. 1.3 Schematic of typical piezoelectric cantilever energy harvester. Left: monomorph, right: bimorph with the addition of a tip mass to match a specific external frequency
6
1 State-of-the-Art
indicated in Fig. 1.3, or by using electronic strategies [44]. Unfortunately, the enviroment that surround us, in which the EHs operate, is characterized by a energy content that is mainly distributed over frequencies within 100 Hz ([45, 46]). If one thinks to power wearable electronics, the human motion frequency contents is bewteen 1 and 5 Hz ([47, 48]). As explained in the previous section, the EHs must be small as much as possible and minimally invasive, and for this reason are characterized by high natural frequencies (hundreds or thousands of hertz). Due to the frequency mismatch the harvester remains practically in static regime. To overcome that limitation, researchers are moving on strategies that can widen the operational bandwidth of the energy harvesters (i.e. good amplification at out of resonance condition). This can be done with linear techniques or by means of nonlinear phenomena as seen starting from the first decade of 2000s ([49, 50]). There are many ways to classify energy harvesters. It is possible to proceed by transduction mechanism (piezo, electromagnetic, electrostatic), by field of application (wearable, biomedical and others), by size (MEMS or not), by operational frequency. Here, in the context of piezoelectric transduction, harvesters are presented according to the type of physics governing the problem: linear or nonlinear. The reason is mainly because the division also follows the historical path previously described.
1.3.1 Linear Systems The group of Beeby at University of Southampton was a forerunner in transferring the work by Williams and Yates [19] to the piezoelectric field. In 2001, they presented the first resonant piezoelectric device [51]. The harvester was in that case a triangular cantilever in which the length was 23 mm and the maximum width 20 mm. The thickness was 0.1 mm for the structural layer made of AISI 316, and 20 .µm for the layer of Heraeus IP222L dielectric material screen printed onto both sides. The subsequent thick-film piezoelectric layers were deposited on both sides using multiple printings and firings. The protoype generated 2 .µW of power at the resonance frequency of 80 Hz over a resistor of 333 k.Ω. In that case, optimal operating conditions were not sought but only evidence of the phenomenon. Roundy in 2004 at UC Berkeley performed studies on cantilevers with also consideration of the tuning of the system at a certain frequency by means of tip tungsten alloy proof masses on the tip of the cantilever [30]. This approach has been then largely adopted to manipulate the resonance frequency. The work proposed different resonant devices with the volume constrained to 1 cm.3 . The first presented device recovered 207 .µW of power output with an input of acceleration amplitude of 2.25 m/s.2 at the resonant frequency of 85 Hz when the harvester was connected to a load resistor of 200 .kΩ. An optimized prototype was also applied to automobile tires. In his work he also provides a first simplified analytical modeling of piezoelectric harvesters. It is important to clarify at this point that such devices are classified as linear because they are thought to be governed by principles of linear dynamics. This is true under appropriate levels of excitation as will be seen in the next chapters. Other past work has been done
1.3 Piezoelectric Vibration Energy Harvesting (PVEH)
7
Fig. 1.4 Top: schematic of 33 mode and interdigitated electrodes. Bottom left: SEM of the fabricated device with bond pads. Bottom right: SEM of the cantilever from [53]
at Massachussets Institute of Technology by duToit et al. [52] and Jeon et al. [53]. In both cases the group presented a MEMS resonant energy harvester, depicted in Fig. 1.4, in which a thin film of Pb(Zr,Ti)O.3 is deposited on a silicon substrate. The significant result of the first research is the individuation, by means of theoretical computation, of two distinct frequencies at which the power recovering is optimized, named respecitvely resonance or anti-resonance. This paper also presents a comparison between the so-called 33 mode (i.e., electric field and strain direction coincide) and 31 mode emphasizing the advantage of using the first one through the pioneering use of interdigitated electrodes. In the second paper, the experimental characterization of the 170 .µm .× 260 .µm PZT beam is presented. By exciting the cantilever at its natural frequency of 13.9 kHz at the amplitude of displacement imposed by the shaker of 14 nm , the protoype generated an energy density of 0.74 .mW h/cm2 , which compares favorably to the values of lithium ion batteries. On the theoretical side, in 2009 Renno et al. [54] focused on optimal operational condition of linear resonant PVEH. Rectangular linear devices at centimeters scale have been largely studied by Erturk and Inman [26, 55, 56] both experimentally and theoretically by means of distributed and lumped parameter models. Some researchers in the past and also in recent times focused on investigation of power densities for vaying geometries of the transducer (i.e. the piezoelectric cantilever). Baker et al. [57], in 2005 showed with experiments that by using tapered (or trapezoidal) cantilevers instead of the classical rectangular geometry it is possible to increase by 30% the power output per unit volume of the harvester. Goldschmidtboeing and Woias in 2008 also investigated tapered cantilevers both theoretically and experimentally [58]. They found that triangular-shaped beams are more effec-
8
1 State-of-the-Art
tive than rectangular-shaped ones in terms of curvature homogeneity independent of the proof mass. This effect is opposed by the adverse mass distribution and the increased stiffness of triangular-shaped beams. Thus the overall efficiency is weakly influenced by shape. Triangular-shaped beams drastically outperform rectangular ones in terms of tolerable excitation amplitude and maximum output power. Other researchers, like Rosa and De Marqui Junior in 2014, focused on the effects of varying cross-sectional area with analytical models and experimental results [59]. In the area of linear devices, other subsequent efforts have been on the one hand to employ lead-free [60] (nontoxic) active materials such as aluminum nitride (AlN) and on the other hand the application of these MEMS devices not necessarily for low-frequency applications. Marzencki et al. [61] in 2007 proposed the design and the experimental characterization of a MEMS AlN cantilever generator with a volume lower than 1 mm.3 working in the frequency range of 1 kHz. The generated powers were in the range of 1 .µW and the fabrication process is compatible with the complementary metal-oxidesemiconductor (CMOS) process. A typical MEMS cantilever PVEH with Zinc Oxide (ZnO) as piezoelectric material has been realized by Singh et al. [62] with a five mask SOI bulk micromachining process in 2019. Alsaad et al. [63], (2019) compared the performance of a cantilever MEMS PVEH using AlN, Lithium Niobate (LiNbO.3 ) and ZnO as possible active material and aluminum, steel or silicon as substrate. They found the better combination with ZnO and Al (2.8 mW at 8.2 V). Külah et al. [64] (2022) presented a fully-implantable MEMS autonomous device for cochlear implant that mimicks the natural hearing mechanism. Even if the described linear systems are simple from a physical point of view they are very complex to realize, and they are of growing interest to the industrial world that is launching a new challenge in terms of size, and in fact we have been starting to talk about nanogenerators [46, 65]. To enhance the power efficiency Sodano and collaborators, in 2018 realized a cantilever with functionally graded nanowires interfaces PZT to improve the energy conversion [66]. Considering the same nominal volume of device, the engineeerd solution produced 7.2 times more power than the simple film-based design. Other authors focused on designing the cantilever MEMS EH at a specific frequency simply by working on the geometry [67], the proof mass [68] considering the application field [69–71] or the effect of the position of the piezoelectric film on the cantilever [72]. Simple linear cantilever systems have been the subject of interest in the past decade to realize energy recovery systems from wind vibrations. Fluid-structure interaction (FSI) is basically used to enhance harvester oscillations. The idea is to transfer the energy initially associated with fluid motion to the vibrating mode of a transductive structure (not necessarily piezoelectric) through their interaction. Various possibilities of FSI have been investigated over the years ([26, 73–78]).
1.3.1.1
Broadband in Linear Systems
Slightly damped devices have great efficiency because of the large oscillations at the resonance but they confine the response to a very limited band around the structural
1.3 Piezoelectric Vibration Energy Harvesting (PVEH)
9
eigenfrequency. Widening the operational band by reducing the quality factor is not a good strategy because the peak response of voltage decreases, [26, 79, 80]. An innovative concept in linear systems has been to widen the operational bandwidth of the harvesting system by means of cantilever arrays resonanting at different frequencies. In this way, the device can respond to an external vibration signal distributed at certain frequencies by activating resonators corresponding to those frequencies. Ferrari et al. [81] in 2008 proposed an array of three bimorphs, that they called multifrequency converter array (MFCA) with different natural frequencies (113 Hz, 183 Hz, 281 Hz). The harvester was connected to a single storage capacitor and an autonomous sensor system was realized. The same group presented the MFCA implementation at the MEMS scale in 2011 [79] with interdigitated electrodes to exploit the 33 mode. Xue et al. in 2011 [82] computationally investigated a system composed of ten bimorphs without tip masses and with different aspect ratio (i.e. dimensions) to match different resonant frequencies. They found a good bandwidth widening by connecting the devices in series and the fact that the operating frequency band can be shifted to the dominant frequency of the ambient vibrations by increasing or decresing the number of bimorphs connected in parallel. A design composed of a circular array of cantilever called pizza-shaped energy harvester has been also recently presented by Caetano and Savi (2022) [83]. Investigations of the detuning (i.e. difference of resonance frequency between contiguous cantilevers in an array) on the bandwith has been carried out by Dechant et al. [84] (2018), and their protoype is represented in Fig. 1.5. Other authors, like Toyabur et al. (2017) used array of cantilever with same features just to realize a multimodal system for covering wide frequency bands [85]. Similarly, Upadrashta and Yang in 2018 [86] used the concept of array of different cantilevers without piezoelectric material to activate different modes of a main vibrating piezoelectric cantilever.
Fig. 1.5 Top view and experimental apparatus of the prototype proposed by Dechant et al. in [84]
10
1 State-of-the-Art
1.3.2 Nonlinear Systems Nonlinear dynamics in mechanical systems began concretely with Huygens’ studies on pendulum [87] and in celestial mechanics. Since then, many studies have been made both in terms of mathematical modelling, computational techniques, and interpretation of phenomena. In accordance with Lacarbonara and Rega [88, 89] with the work (and the legacy) of Professor Ali H. Nayfeh, “a new paradigm in higher education and engineering called nonlinear dynamics for design has begun in our time, which involves advantageously exploiting nonlinear phenomena and principles to improve the performance of engineering systems.” In this context, together with multiphysics phenomena, in the last 15 years or so, considerable progress has been made in the field of vibration-based energy harvesting. Various nonlinear phenomena or sources of nonlinearities (geometrical, physical) in mechanical systems have been exploited to improve the performance [90]. In the following the main works together with the phenomena are briefly discussed. Focus will be on the magnetic interaction, which is the main topic of this work. It should be emphasized that regardless of their nature, it is possible to classify nonlinearities as either intentional, if introduced in accordance with the principle enunciated above, or inherent if due to internal sources of the mechanical system itself in its operational regime. Of course, as will be seen below, these can coexist.
1.3.2.1
Snap-Through Buckling (STB) Mechanisms
One possibility for solving the frequency match problem is to use multi-stable systems with snap-through buckling (STB) of mechanical structures. This kind of systems are widely studied for even more generic purposes [91–95]. The working process is the following: the designed structure, that is typically an arc shaped beam, has more than one stable configuration, and it exploits impulsive excitation to migrate from one stable configuration to another. The advantage of the solution is that in order to activate the mechanism, it is generally not necessary for the external perturbation to have the same frequency of the mechanism. The only necessary thing is a certain energy threshold, usually provided by means of an external acceleration that can create the configuration migration in terms of the total potential energy (TPE). Such impulsive migration can be exploited, for instance, to generate an impulse at the clamp of a cantilever as done by Jung et al. [96] (2010) and by Speciale et al. [97] (2020, see Fig. 1.6), or some piezo patches can be equipped directly on the bistable mechanism, as done in the early work Baker et al. [57] (2005), or by Cottone et al. [98]. Gammaitoni and coworkers proposed also a version with electromagnetic transduction [99] (2014). Such kind of bistable systems have been studied also by Masana and Daqaq [100] in which they introduced an axial load to manipulate the potential function of the system realizing a mono-stable and a bistable depending by the presence of such force. In 2019, the bistable piezoelectric beam has been implemented at the MEMS scale by Xu et al. [101]. Andò et al. used a STB mechanical
1.3 Piezoelectric Vibration Energy Harvesting (PVEH)
11
Fig. 1.6 Schematic of a bistable mechanism by Speciale et al. from [97]
system with a central proof mass installed to induce impacts on piezoelectric beams every time that STB changes configuration [102]. Arrieta et al. applied the concept of STB mechanism to piezoelectric plates [103] (2010).
1.3.2.2
Impact-Based Solution
Another strategy to enhance the behaviour of piezoelectric harvester is the so called frequency up-conversion (FuC) mechanism. The concept of frequency conversion of a signal is widespread especially in electronics and telecommunications [104]. It is a process by which a system translates the frequency energy spectrum of a signal while keeping unchanged the distances between different components and in electronics systems also the bandwith of the original signal. The frequency converter (or changer) (FC) is classified as up-converter if the output frequencies are higher than the ones of the input. In the opposite case it is called down-converter. In telecommunications, this procedure can be carried out by means of a mixer that is a nonlinear circuit. They are commonly used to convert the frequency of AC power or to control the velocity of AC motors for pumps and fans. In the last decade, this concept has been carried into the vibration energy harvesting context with the aim of having good dynamic amplification of the high-frequency harvester even though the input signal is at low-frequency. One possibility of FuC can be made with impacts by exploting a moving low-frequency mass to forcing impulsively the harvester. Throughout history, essentially two solutions have been explored: the first one concerns the impact directly on the harvester, the second one the indirect impact on elastic supports interacting with the harvester, giving rise to piecewise linear systems [90] (such as the package or stoppers). Early investigations on this concept have been carried out by Umeda et al. [105] (1996) on a boundary-clamped piezoelectric plate stimulated by the free fall impact of a steel ball. The principle is depicted in Fig. 1.7 (left). In that case a nonlinearity arises due to the fact that the system can vibrate at two frequencies: one just after the impact in which plate and ball travel attached and one after the split. However, after the impact the vibrational phenomenon of the plate is that of
12
1 State-of-the-Art
Fig. 1.7 Left: schematic from early investigations on PVEH from impacts by Umeda et al. [105]. Right: schematic of the prototype by Ju and Ji [107]
a linear oscillator with assigned initial conditions of velocity and displacement. The latter approach has been exploited recently by Nastro et al. [106] (2022) to realize a wearable energy harvester by means of a wristband and watchband. To safeguard the piezoelectric material, the impacts can be provided to it indirectly. Ju and Ji [107] (2018) realized a piezoelectric harvester in which the vibration of the transducer is activated through the impacts of a metal sphere free to move in a closed compartment on the device walls (see right side of Fig. 1.7). Recently, Rosso et al. [108] proposed a mixed enhancement of a cantilever piezoelectric energy harvester through indirect impacts on the package of a mono-axial moving mass and nonlinear magnetic interaction between that mass and the cantilever. They experimentally proved that magnetic interaction is not always beneficial, depending on the energy levels of the motion. There are also techniques using indirect impact and mixed transduction mechanism Halim et al. [109] (2019). They realized a doubly-clamped piezoelectric beam with a central magnetic mass on the bottom of the transducer and a central iron mass on the top. The mass above is impacted by another moving mass in a guide and it activates the vibration of the piezoelectric. At the same time, a coil placed below the magnetic mass collects energy from changes in the magnetic field due to the relative motion.
1.3.2.3
Mechanical Plucking-Based Frequency Up-Conversion
The idea of this approach is to impose an initial quasi-static displacement via flexible plectrum to the tip of the piezoelectric transducer and a sudden release of that condition. The dynamic consequence is a free vibration regime of the piezoelectric beam at its natural frequency that allows to recover electrical energy from voltage oscillations. One of the first concepts has been proposed by Pozzi et al. in 2011 [110] with the so called pizzicato harvester. They proposed a knee-joint wearable device [111] (see Fig. 1.8) that exploits the relative rotation between the shank and the thigh to pluck piezoelectric bimorphs clamped on a hub via plectra distributed over an outer ring. At Georgia Tech, Kathpalia et al. [112] developed a theoretical model and also the experimental validation of a similar kind of system in which a nonlinear flexible plectrum plucks the piezoelectric beam along a straight path. They
1.3 Piezoelectric Vibration Energy Harvesting (PVEH)
13
Fig. 1.8 Top, from left to right: schematic of pizzicato harvester and prototype by Pozzi et al. from [111]. Bottom, from left to right: schematic mechanism of the plucking and experimental setup proposed by Kathpalia et al. from [112]
identified also a dependence of the performance of the harvester on the geometry of the plectrum. Their experimental setup is depicted in Fig. 1.8 (bottom). The mechanical plucking has been also successfully implemented at the MEMS scale by Janphuang et al. [113]. The design consists of a rotating gear plucking a MEMS cantilever with its teeth that could be driven by an oscillating mass. The main drawback of these kind of system is the fact that piezoelectric crystals are very brittle and the mechanical contact could damage the transducers. Taking into account this, Pozzi proposed also a contactless version of pizzicato [114].
1.3.2.4
Magnetic Interaction Broadband and Plucking Mechanisms
The broadening of the bandwidth via magnetic interaction has the purpose of introducing intentional nonlinearities for the manipulation of the system potential. In general, a system of that type can be monostable or multistable. The interaction can be used simply to improve the response of the system in terms of the amplitude of the oscillations out of the resonance condition of the corresponding linear system (i.e. the cantilever) or to pluck the piezoelectric cantilever. In the latter case, the harvester interacts with other systems like oscillators and rotors. In 2009, Erturk et al. presented the integration of the chaotic strange attractor by Moon and Holmes [115] with piezoelectric layers [49] creating the so called piezomagnetoelastic energy
14
1 State-of-the-Art
Fig. 1.9 Top, from left to right: schematic of the strange attractor studied by Moon and Holmes, same concept with piezoelectric layers proposed by Erturk et al. from [49], and example of the comparison between linear and nonlinear response for harmonic excitation, from [118]. Bottom, from left to right: schematic and prototype of the reversible hysteretic energy harvester by Stanton, from [119]
harvester. Through theoretical investigations and experiments conducted on a ferromagnetic beam 145 mm long, 26 mm wide and 0.26 mm thick, the nonlinear harvesters showed an increasing of the open circuit (OC) voltage of 200% with respect to the linear case. Through the presence of the ferromagnetic cantilever and the magnets indicated in (Fig. 1.9), the system is multistable, and the number of equilibrium points depends on the magnets spacing. Erturk exploited a layout with three (two stable) equilibrium points giving rise to the Duffing oscillator [116, 117]. This kind of system allowed to reach larger amplitude in comparison with the linear system due the shape of the magnetoelastic potential. The comparison of the dynamic response has been largely investigated in a later work of the same group [118]. Also Cottone et al. [50] in 2009 proposed a similar device with same consideration on the potential energy of the system depending on the magnets spacing. In the same year Stanton et al. [119, 120] at Duke University proposed a method to invoke softening or hardening response by a suitable tuning of the relative distance between a tip magnet put on the harvester and a couple of magnets mounted on an elastic support. In that way the bandwith is increased with hysteretical behavior and it is reached a good performance out of resonance condition. It could be said that with the aforemetioned works, a new prolific era started in piezoelectric vibration energy harvesting via magnetic interaction. Ferrari et al. [121, 122] (2010) studied a ferromagnetic cantilever with piezoelectric film similarly to Erturk but only with a single magnet at the ground. Since then, these kinds of systems have always been the subject of great interest both for theoretical investigations and modeling [123– 127], also with higher number of stable configurations [128]. Recently Tao-Hai
1.3 Piezoelectric Vibration Energy Harvesting (PVEH)
15
et al. [129] (2022) studied a bistable evaluating the performance under both galloping from wind and base excitation. Another interesting possibilty to exploit the bistability has been explored by Kim et al. [130]. They mounted on the same elastic support two neighboring cantilevers with longitudinal axes orthogonal to each other and equipped with a tip magnet. When the system is subjected to an external vibration, the interaction between the magnets amplifies the dynamics of both oscillators leading to band broadening with better performance than a standard bistable system (i.e., without magnetic coupling between two cantilevers). A similar concept has been developed by other authors, such as Yang et al. [131] with focus on the internal resonance. In 2020, Chandwani et al. [132] used a scheme of the magnetic interaction like Ferrari [121] to merge two distinct wide frequency operational bands due to another sources of nolinearity caused by a tip mass with a position-varying center of gravity (COG) through rolling cylinders. The literature shows that multistable solutions has been successfully implemented at the MEMS scale. Wu et al. [133] proposed a MEMS energy harvester with magnetically coupled oscillators. They obtained 41.6 .µW) of power with an impedance of 0.3 .MΩ. The object exibithed good values of voltages (order of Volts) below 50 Hz. Other works with coupled systems with a central spring-magnetic mass interacting with piezoelectric beams can be found in [134, 135]. The magnetic interaction is also used in mixed energy conversion mechanisms. In that framework, Li et al. [136], designed an energy harvester that can scavenge energy via piezoelectric and electromagnetic transduction. The magnetic force is used to amplify the vibration of a drive-beam equipped with a magnet. The spatial variation of the magnetic flux due to the oscillation is then used to scavenge energy with a coil around the tip magnet. Furthermore, the driving beam bumps a piezoelectric transducer realizing an impact-based FuC. The principle of frequency up-conversion using magnets is slightly different with respect to the previous illustrated broadband magnetic mechanisms as explained by Tang et al. [137]. In this latter case, piezoelectric cantilever and magnets are applied with base excitations as a whole. Instead, in the frequency up-conversion mechanism, the piezoelectric cantilever typically stands still and is excited by magnetic force applied at the free end. In general, one magnet is put as in the previous cases on the tip of the cantilever, the other one is constrained to a seismic mass, that is a mechanical system moving at low-frequencies. In general, in literature, it can be found two possibilities for the motion of the seismic mass. In the first case it is a mechanical system able to vibrate at very low-frequencies in comparison to the piezoelectric transducer [138]. In the other case it is a wheel or a rotational mechanism activated from an external source (this case is very common in literature). The magnetic FuC has been largely investigated in literature starting from 2011. Tang et al. [139] (different researcher from the previous one), proposed a system composed of two opposite piezoelectric cantilevers with a magnetic tip mass and a central compartment hosting a moving magnet for external input acceleration. The prototype, realized at the centimeter scale, resulted in average power generation of over 10 .µW within a broad frequency range of 10–22 Hz under 1g acceleration. Pillastch et al. realized a prototype, depicted in Fig. 1.10, working through magnetic plucking based on a proof
16
1 State-of-the-Art
mass rotating mechanism [140, 141]. They also carried out modelling (2014) about FuC [142], using for the piezoelectric beams the electromechanical model proposed in [26] and for the magnetic interaction both an inverse square approach and finite element simulation. They concluded that the inverse square, even if cannot match the accuracy of a complete finite element simulation, can give some information on the system behavior. In 2012, the same group proposed an experimental work on the basis of the same principle in which a rolling external proof mass actuates an array of piezoelectric cantilevers that form a distribuited transduction mechanism [143]. At an excitation frequency of 2 Hz and an acceleration of 2.72 m./s.2 a power output of 2.1 mW was achieved. analyzing the literature, it is immediate to realize that since then, much attention has been paid to the rotational mechanisms to implement the harvester. Ramezanpour et al. [144, 145] (2016) used a rotating pendulum with a gear. Those works demonstrate an increasing output voltage if the number of magnets on the gear increases. Xue and Roundy [146] in 2017 used a concept similar to that one by Pillatsch with a rotating proof mass externally driven to find the best configurations between the poles of the magnets to improve the performance of the PVEH [147]. They found a dynamics highly dominated by the first mode of vibration for the so called in-plane plucking in which the poles of the magnets are parallel to the beam axis. They also pointed out power in the order of the mW below 8 Hz of frequency of the rotor. In that case the magnetic force is modelled through the multi-dipole approach that will be object of studies in the following. Shu et al. in 2018 studied a similar system with a standard interface circuit that includes an AC-DC rectifier followed by a large filtering capacitance [148]. They used a dipole-dipole approach to model the magnetic interaction with comparison with some experimental results. Dauksevicius et al. in the same year carried out an in-depth study on some physical aspects of plucking dynamics [149]. They propose a computational study via finite element on the dependence of the magnetic force by the gap between the magnets. After that, they propose to experimentally study the influence on the cantilever response of the plucking speed, the gap between the magnets which they call clearance, and the value of the load resistor. They identify, as their convention, three typical phases of operation of the transducer: a quasi-static phenomenon, a transition regime and another one fully dominated by the dynamics of the first mode. Although it is a rare study that focuses on the speed of interaction, it does not propose any validation of the magnetic phenomenon apart, moreover there is no consideration of the possibility of changing in the behavior of the material, such as the possible arising of material nonlinearities effects for variations of magnetic force. Furthermore, also in this case the dynamics is studied on a rotating system, and being the magnetic force positional in its nature, the result is not generalizable. After that, Kleiva and Dauksevicius investigated the multimagnet excitation and realized also a protoype with a rectilinear driving magnet constraint for wearable application [150, 151]. Other similar mechanisms have been largely investigated [152–154] (see Fig. 1.10) also with combination with snap-through mechanism [155]. An innovative contribution has been provided in 2021 by Lo et al. [156]. It is proposed a magnetic plucking via rotor mechanism in two distinct points (at the tip and in the middle)
1.3 Piezoelectric Vibration Energy Harvesting (PVEH)
17
Fig. 1.10 Top, from left to right: schematic of the energy harvester using magnetic frequency upconversion and example of beam tip displacement under the magnetic plucking, by Fu and Yeatman [152]. Bottom, from left to right: prototype of energy harvester based on rotating proof mass designed by Pillatsch et al. from [140]. Schematic of the mixed modes energy harvester proposed by Lo [156]
of a piezoelectric cantilever at the same time. In this way it is possible to activate two vibrational modes and have both a frequency up-conversion and a broadband. The schematic of the latter mechanism is depicted in Fig. 1.10 (bottom right). The magnetic plucking principle has been also exploited in electromagnetic [157] and mixed piezo-magnetic transduction [158]. Recently, Bodduluri et al. [159] proposed the magnetic plucking at the MEMS scale with an integrated process of the magnetic material deposition.
1.3.2.5
Other Kind of Nonlinearities and Electronics Circuits
Many other forms of mechanical intentional nonlinearities can be found in the literature to improve harvester performance. Typically, these are nonlinearities exhibited through design features; we do not refer here to inherent material nonlinearities that will be investigated in depth later. Some works are completely general and simply emphasize the nonlinear effect in device modeling. In 2014 Cammarano et al. [160] proposed an analytical and experimental study on a nonlinear oscillator with the introduction of cubic stiffness. They studied the effects of different parameters (input acceleration, damping, nonlinear stiffness) on the bandwidth. Their result fits every case in which the system can be described with that kind of nonlinearity and it
18
1 State-of-the-Art
provides optimal operational conditions. Zou et al. [161] (2021) find a way to introduce a nonlinear interaction force via a pre-compressed spring, a miniature bearing, and a raceway that induces a load at the end of a cantilever piezoelectric beam. In this way, it is possible to realize a mono/bi/tri-stable energy harvester depending on the layout of the spring and so, to manipulate the desirable nonlinearity of the mechanical system. Other designs make use of pendulum systems [162] combined also with magnetic interaction for a broadband system [163, 164]. This work is focused on the mechanical part of PVEH. The electrical part will be simply schematized as a resistor as made by other researchers [26, 54]. However, in general various electronic circuits can be employed to manage the electrical energy recovered by the harvester. Ottman et al. realized an adaptive control technique for the dc-dc converter of the harvester to match continuously the optimal load [165]. After that, they presented an optimimized method to harvest energy from a piezoelectric beam using a step-down dc-dc converter [166]. Other studies performed by the group of Guyomar proposed the so called syncronized switch harvesting on inductor (SSHI) nonlinear technique which is efficient in non-resonant systems [167–169]. Silva et al. [170], in 2019, used nonlinear switching circuits on the M-shaped energy harvester designed by Leadenam [171]. Leadenham and Erturk [172] investigated the nonlinear process of AC-DC conversion with non-ideal diodes. A recent nonlinear mechanism has been proposed by Bonnin et al. [173]. They designed an impedance matching network that can amplify the dynamics response of the harvester at a frequency chosen by the designer. Yan et al. [174], and Yu and Zhou [175] used the combination inductorresistor to widen the frequency band. These references show that also nonlinear electronics is subjected to intensive investigations.
References 1. Gad-el-Hak M (2005) MEMS design and fabrication. Taylor & Francis Group 2. Senturia SD (2001) Microsystem design. Springer, New York, NY 3. Maluf N, Williams K (2004) An introduction to microelectromechanical systems engineering. Artech House, Inc 4. Feynman RP (1959) There’s plenty of room at the bottom: an invitation to enter a new field of physics. Lecture to American Physical Society, California Institute of Technology. https:// calteches.library.caltech.edu/1976/ 5. Nathanson HC, Newell WE, Wickstorm RA, Davis JR (1967) The resonant gate transistor. IEEE Trans Electron Devices ED-14(3):117–133 6. Corigliano A, Ardito R, Comi C, Frangi F, Ghisi A, Mariani S (2017) Mechanics of microsystems. Wiley 7. Adams TM, Layton RA (2010) Introductory MEMS, fabrication and application. Springer 8. Younis MI (2010) MEMS linear and nonlinear statics and dynamics. Springer 9. Sandia National Laboratories website. https://www.sandia.gov/mesa/mems-video-imagegallery/ 10. xMEMS website. https://xmems.com/ 11. Boussey J (2002) Microsystems technology: fabrication test and reliability. Hermes Science Publications 12. Développement Y (2021) Status of the MEMS industry
References
19
13. Tummala RR (2004) Fundamentals of microsystems packaging. McGraw-Hill 14. Lobontiu N, Garcia E (2005) Mechanics of microelectromechanical systems. Springer 15. Roylance ML, Angell JB (1979) A batch-fabricated silicon accelerometer. IEEE Trans Electron Devices ED-26(12):1911–1917 16. Leondes CT (2005) MEMS/NEMS handbook techniques and applications. Springer 17. Pepite ST (2022) Viaggio nella "clean room" di Agrate 300 - STMicroelectronics. YouTube website. https://www.youtube.com/watch?v=hqzcWOFLVDE 18. Briand D, Yeatman E, Roundy S (2015) Micro energy harvesting. Wiley-CH 19. Williams CB, Yates RB (1996) Analysis of a micro-electric generator for microsystems. Sens Actuators A 52(52):8–11 20. Roundy S, Wright PK, Rabaey JM (2004) Energy scavenging for wireless sensor networks with special focus on vibrations. Springer 21. Wang L, Yuan FG (2008) Vibration energy harvesting by magnetostrictive material. Smart Mater Struct 17:045009 (14pp) 22. Saha O, Andersen E, Roundy S (2021) Wireless power transfer by self-biased magnetoelectric laminate for biomedical implants. In: 2021 IEEE 20th international conference on micro and nanotechnology for power generation and energy conversion applications (PowerMEMS), Exeter, UK 23. Borkar H, Gaikwad VM, Dutta S, Tomar M, Gupta V, Kumar A (2022) Lead-free laminated structures for eco-friendly energy harvesters and magnetoelectric sensors. J Phys Chem Solids 160 24. Lallart M, Cottinet PJ, Guyomar D, Lebrun L (2012) Electrostrictive polymers for mechanical energy harvesting. J Polym Sci Part B Polym Phys 50:523–535 25. Liu Y, Ren KL, Hofman HF, Zhang Q (2005) Investigation of electrostrictive polymers for energy harvesting. IEEE Trans Ultrason Ferroelectr Freq Control 52(12):2411–2417 26. Erturk A, Inman DJ (2011) Piezoelectric energy harvesting. Wiley 27. Cook-Chennault KA, Thambi N, Sastry AN (2008) Powering MEMS portable devices - a review of non-regenerative and regenerative power supply systems with special emphasis on piezoelectric energy harvesting systems. Smart Mater Struct 17:043001 28. Safaei M, Sodano HA, Anton SR (2019) A review of energy harvesting using piezoelectric materials: state-of-the-art a decade later (2008–2018). Smart Mater Struct 28:113001 (62pp) 29. Beeby SP, Tudor MJ, White NM (2006) Energy harvesting vibration sources for microsystems applications. Meas Sci Technol 17:R175–R195 30. Roundy S (2003) Energy scavenging for wireless sensor nodes with a focus on vibration to electricity conversion. PhD thesis, University of California, Berkeley 31. Roundy S, Wright P, Pister K (2002) Micro-electrostatic vibration-to-electricity converters. In: Proceedings of IMECE 2002, pp 1–10 32. Miao P, Mitcheson PD, Holmes AS, Yeatman EM, Green TC, Stark BH (2006) Mems inertial power generators for biomedical applications. Microsyst Technol 12:1079–1083 33. Basset P, Galayko D, Cottone F, Guillemet R, Blokhina E, Marty F, Bourouina T (2014) Electrostatic vibration energy harvester with combined effect of electrical nonlinearities and mechanical impact. J Micromechanics Microengineering 24:035001 (14pp) 34. Anton SR, Sodano HA (2007) A review of power harvesting using piezoelectric materials (2003–2006). Smart Mater Struct 16 35. Anton SR, Erturk A, Inman DJ (2012a) Bending strength of piezoelectric ceramics and single crystals for multifunctional load-bearing applications. IEEE Trans Ultrason Ferroelectr Freq Control 59(6) 36. Pillatsch P, Xiao BL, Shashoua N, Gramling HM, Yeatman EM, Wright PK (2017) Degradation of bimorph piezoelectric bending beams in energy harvesting applications. Smart Mater Struct 26(3):035046 37. Stojˇcev MK, Kosanovi´c MR, Golubovi´c LR (2009) Power management and energy harvesting techniques for wireless sensor nodes. In: TELKSIS 2009, pp 65–72 38. Chalasani S, Conrad J (2008) A survey of energy harvesting sources for embedded systems. In: Proceedings of IEEE SoutheastCon, pp 442–447. http://www.citeulike.org/user/ macgyveremir/article/3041664
20
1 State-of-the-Art
39. Anton SR, Inman DJ (2008) Vibration energy harvesting for unmanned aerial vehicles. Proc SPIE 6928(692824) 40. Anton SR (2011) Multifunctional piezoelectric energy harvesting concepts. PhD thesis, Virginia Polytechninc Institute and State University, Blacksburg 41. Anton SR, Erturk A, Inman DJ (2012b) Multifunctional unmanned aerial vehicle wing spar for low-power generation and storage. J Aircr 49(1) 42. Hoummadi E, Safei M, Anton SR (2017) Design, analysis, and fabrication of a piezoelectric force plate. Health monitoring of structural and biological systems. Proc SPIE 10170(101700W) 43. Safei M, Meneghini RM, Anton SR (2018) Energy harvesting and sensing with embedded piezoelectric ceramics in knee implants. IEEE/ASME Trans Mechatron 23(2) 44. Lallart M, Anton SR, Inman DJ (2010) Frequency self-tuning scheme for broadband vibration energy harvesting. J Intell Mater Syst Struct 21 45. Roundy S (2005) On the effectiveness of vibration-based energy harvesting. J Intell Mater Syst Struct 16:809–823. https://doi.org/10.1177/1045389X05054042 46. Blokhina E, El Aroudi AE, Alarcon E, Galayko D (2016) Nonlinearity in energy harvesting systems. Micro- and nanoscale applications. Springer, Cham, Switzerland 47. Antonsson EK, Mann RW (1985) The frequency content of the gait. J Biomech 18(1):39–47 48. Antaki JF, Bertocci GE, Green EC, Nadeem A, Rintoul T, Kormos RL, Griffith B (1995) A gait-powered autologous battery charging system for artificial organs. ASAIO J 41(3):M588– M595 49. Erturk A, Hoffmann J, Inman DJ (2009) A piezomagnetoelastic structure for broadband vibration energy harvesting. Appl Phys Lett 94:254102 50. Cottone F, Vocca H, Gammaitoni L (2009) Nonlinear energy harvesting. Phys Rev Lett 102:080601 51. White NM, Glynne-Jones P, Beeby SP (2001) A novel thick-film piezoelectric microgenerator. Smart Mater Struct 10:850–852 52. duToit NE, Wardle BL, Kim SG (2005) Design considerations for MEMS-scale piezoelectric mechanical vibration energy harvesters. Integr Ferroelectr 71:121–160 53. Jeon YB, Sood R, Jeong JH, Kim SK (2005) MEMS power generator with transverse mode thin film PZT. Sens Actuators Phys 1022:16–22 54. Renno JM, Daqaq MF, Inman DJ (2009) On the optimal energy harvesting from a vibration source. J Sound Vib 320:386–405 55. Erturk A, Inman DJ (2009) An experimentally validated bimorph cantilever model for piezoelectric energy harvesting from base excitations. Smart Mater Struct 18:025009 56. Erturk A (2009) Electromechanical modeling of piezoelectric energy harvesters. PhD thesis, Virginia Polytechnic Institute and State University, Blacksburg 57. Baker J, Roundy S, Wright P Alternative geometries for increasing power density in vibration energy scavenging for wireless sensor networks. In: 3rd international energy conversion engineering conference, San Francisco, California, 1, 15–18 August 2005 58. Goldschmidtboeing F, Woias P (2008) Characterization of different beam shapes for piezoelectric energy harvesting. J Micromechanics Microengineering 18 59. Rosa M, De Marqui Junior C (2014) Modeling and analysis of a piezoelectric energy harvester with varying cross-sectional area. Shock Vib, ID 930503 60. Shrout TR, Zhang SJ (2007) Lead-free piezoelectric ceramics: alternatives for PZT? J Electroceramics 19 61. Marzencki M, Ammar Y, Basrour S Design, fabrication and characterization of a piezoelectric microgenerator including a power management circuit. In: Proceedings of DTIP of MEMS and MOEMS 2007, Stresa, Italy 62. Singh R, Pant BD, Jain A (2019) Simulations, fabrication, and characterization of d31 mode piezoelectric vibration energy harvester. Microsyst Technol 63. Alsaad AM, Ahmad AA, Al-Bataineh QM, Daoud NS, Khazaleh MH (2019) Design and analysis of MEMS based Aluminum Nitride (AlN), Lithium Niobate (LiNnO.3 ) and Zinc Oxide (ZnO) cantilever with different substrate materials for piezoelectric vibration energy harvesters using COMSOL Multiphysics software. Open J Appl Sci 9:181–197
References
21
64. Külah H, Ulu¸san H, Chamanian S, Batu A, Uˇgur MB, Yüksel MB, Yilmaz AM, Yiˇgit HA, Koyuncuoˇglu A, Topçu Ö, Soydan AK (2022) A fully-implantable MEMS-based autonomous cochlear implant. In: Proceedings of IEEE MEMS 2022, Tokyo, Japan 65. Indira SS, Vaithilingam CA, Oruganti KSP, Mohd F, Rahman S (2019) Nanogenerators as a sustainable power source: state of art, applications, and challenges. Nanomaterials 9(773) 66. Malakooti MH, Zhou Z, Sodano A (2018) Enhanced energy harvesting through nanowire based functionally graded interfaces. Nano Energy 52:171–182 67. Tian Y, Li G, Yi Z, Li J, Yang B (2018) A low-frequency mems piezoelectric energy harvester with a rectangular hole based on bulk PZT film. J Phys Chem Solids 117:21–27 68. Liu H, Tay CJ, Quan C, Kobayashi T, Lee C (2011) Piezoelectric MEMS energy harvester for low-frequency vibrations with wideband operation range and steadily increased output power. J Microelectromechanical Syst 20(5):1131–1141 69. Du S, Jia Y, Arroyo E, Fernandez S, Riches ST, Sesia AA (2019) MEMS piezoelectric energy harvester powered wireless sensor module driven by noisy base excitation. In: Proceedings of transducers 2019-Eurosensors XXXIII, pp 350–353 70. Jung BC, Huh YC, Park JW (2018) A self-powered, threshold-based wireless sensor for the detection of floor vibrations. Sensors 18 71. Yang F, Gao M, Wang P, Zuo (2021) Wireless power transfer by self-biased magnetoelectric laminate for biomedical implants. In: 2021 IEEE 20th international conference on micro and nanotechnology for power generation and energy conversion applications (PowerMEMS), Exeter, UK 72. Pradeesh EL, Udhayakumar S (2019) Effect of placement of piezoelectric material and proof mass on the performance of piezoelectric energy harvester. Mech Syst Signal Process 130:664–676 73. De Marqui Jr C, Erturk A, Inman DJ (2010) Piezoaeroelastic modeling and analysis of a generator wing with continuous and segmented electrodes. J Intell Mater Syst Struct 74. Abdelkefi A, Yan Z, Hajj MR (2013) Performance analysis of galloping-based piezoaeroelastic energy harvesters with different cross-sectioin geometries. J Intell Mater Syst Struct 25(2):246–256 75. Abdelkefi A (2016) Aeroelastic energy harvesting: a review. Int J Eng Sci 100:112–135 76. Ardito R (2014) MEMS energy harvesters based on aeroelastic phenomena. In: Proceedings of the jointly organized 11th world congress on computational mechanics - WCCM XI 5th European congress on computational mechanics - ECCM V 6th European congress on computational fluid dynamics - ECFD VI 77. Bibo A, Daqaq MF (2014) On the optimal performance and universal design curves of galloping energy harvesters. Appl Phys Lett 104(2):023901 78. Wang J, Gu S, Abdelkefi A, Bose C (2021) Enhancing piezoelectric energy harvesting from the flow-induced vibration of a circular cylinder using dual splitters. Smart Mater Struct 30:05LT01 (10pp) 79. Baú M, Ferrari M, Tonoli E, Ferrari V (2011) Sensors and energy harvesters based on piezoelectric thick films. In: Procedia engineering, EUROSENSORS XXV, vol 25 80. Gafforelli G (2015) Piezoelectric vibration micro energy harvester. PhD thesis, Politecnico di Milano, Milano 81. Ferrari M, Ferrari V, Guizzetti M, Marioli D, Taroni A (2008) Piezoelectric multifrequency energy converter for power harvesting in autonomous microsystems. Sens Actuators A 142:329–335 82. Xue H, Hu Y, Wang QM (2008) Broadband piezoelectric energy harvesting devices using multiple bimorphs with different operating frequencies. IEEE Trans Ultrason Ferroelectr Freq Control 55(9):2104–2108 83. Caetano VJ, Savi MA (2021) Multimodal pizza-shaped piezoelectric vibration-based energy harvesters. J Intell Mater Syst Struct 32(20):2505–2528 84. Dechant E, Fedulov F, Fetisov LY, Shamonin M (2017) Bandwidth widening of piezoelectric cantilever beam arrays by mass-tip tuning for low-frequency vibration energy harvesting. Appl Sci 7
22
1 State-of-the-Art
85. Toyabur RM, Salauddin M, Park JY (2017) Design and experiment of piezoelectric multimodal energy harvester for low frequency vibration. Ceram Int 86. Upadrashta D, Yang Y (2018) Trident-shaped multimodal piezoelectric energy harvester. J Aerosp Eng 31(5) 87. Huygens C Horologium oscillatorium: sive de motu pendulorum ad horologia aptato dimostrationes geometricae. 1673 88. Lacarbonara W (2017) Obituary: professor Ali H. Nayfeh 21 December 1933–27 March 2017. J Sound Vib 400:680–683 89. Rega G (2020) Nonlinear dynamics in mechanics and engineering: 40 years of developments and Ali H. Nayfeh’s legacy. Nonlinear Dyn 99:11–34 90. Daqaq MF, Masana R, Erturk A, Quinn DD (2014) On the role of nonlinearities in vibratory energy harvesting: a critical review and discussion. Appl Mech Rev 66:040801–1 91. Bažant Z, Cedolin L (2010) Stability of structures: elastic, inelastic, fracture and damage theories. World Scientific Publishing 92. Vangbo M (1998) An analytical analysis of a compressed bistable buckled beam. Sens Actuators A 69:212–216 93. Qiu J, Lang JH, Slocum AH (2001) A centrally-clamped parallel-beam bistable MEMS mechanism. In: Technical digest. MEMS 2001. 14th IEEE international conference on micro electro mechanical systems (Cat. No. 01CH37090), pp 353–356 94. Qiu J, Lang JH, Slocum AH (2004) A curved-beam bistable mechanism. J Microelectromechanical Syst 13(2):137–145 95. Frangi AA, De Masi B, Confalonieri F, Zerbini S (2015) Threshold shock sensor based on a bistable mechanism: design, modeling, and measurements. J Microelectromechanical Syst 24(6) 96. Jung SM, Yun KS (2010) Energy-harvesting device with mechanical frequency-up conversion mechanism for increased power efficiency and wideband operation. Appl Phys Lett 96:111906 97. Speciale A, Ardito R, Baú M, Ferrari M, Ferrari V, Frangi A (2020) Snap-through buckling mechanism for frequency-up conversion in piezoelectric energy harvesting. Appl Sci 10:3614 98. Cottone F, Gammaitoni L, Vocca H, Ferrari M, Ferrari V (2012) Piezoelectric buckled beams for random vibration energy harvesting. Smart Mater Struct 21:3614 99. Cottone F, Basset P, Vocca H, Gammaitoni L, Bourouina T (2014) Bistable electromagnetic generator based on buckled beams for vibration energy harvesting. J Intell Mater Syst Struct 25(12):1485–1495 100. Masana R, Daqaq MF (2011) Relative performances of a vibratory energy harvester in monoand bi-stable potentials. J Sound Vib 330:6036–6052 101. Xu R, Akay J, Kim S-G (2019) Buckled MEMS beams for energy harvesting from low frequency vibrations. Research (14pp) 102. Andò B, Baglio S, Bulsara AR, Marletta V (2014) A bistable buckled beam based approach for vibrational energy harvesting. Sens Actuators Phys 211:153–161 103. Arrieta AF, Hagedorn P, Erturk A, Inamn DJ (2010) A piezoelectric bistable plate for nonlinear broadband energy harvesting. Appl Phys Lett 97:104102 104. Blalock TJ (2003) The frequency charger era - interconnecting systems of varying cycles. IEEE Power & Energy Mag 1(5):72–79 105. Umeda M, Nakamura K, Ueha S (1996) Analysis of the transformation of mechanical impact energy to electric energy using piezoelectric vibrator. Jpn J Appl Phys 35(5S):3267 106. Nastro A, Pienazza N, Baú M, Aceti P, Rouvala M, Ardito R, Ferrari M, Corigliano A, Ferrari V (2022) Wearable ball-impact piezoelectric multi-converters for low-frequency energy harvesting from human motion. Sensors 22. https://doi.org/10.3390/s22030772 107. Ju S, Ji CH (2018) Impact-based piezoelectric vibration energy harvester. Appl Energy 214:139–151 108. Rosso M, Nastro A, Baú M, Ferrari M, Ferrari V, Corigliano A, Ardito R (2022) Piezoelectric energy harvesting from low-frequency vibrations based on magnetic plucking and indirect impacts. Sensors 22:5911
References
23
109. Halim MA, Kabir MH, Cho H, Park JY (2019) A frequency up-converted hybrid energy harvester using transverse impact-driven piezoelectric bimorph for human-limb motion. Micromachines 10(701). https://doi.org/10.3390/mi10100701 110. Pozzi M, Zhu M (2012) Characterization of a rotary piezoelectric energy harvester based on plucking excitation for knee-joint wearable applications. Smart Mater Struct 21:055004 111. Pozzi M, Aung MSH, Zhu M, Jones RK, Goulermas JY (2012) The pizzicato knee-joint energy harvester: characterization with biomechanical data and the effect of backpack load. Smart Mater Struct 21:075023 (8pp) 112. Kathpalia B, Tan D, Stern I, Erturk A (2018) An experimentally validated model for geometrically nonlinear plucking-based frequency up-conversion in energy harvesting. Smart Mater Struct 27:015024 (9pp) 113. Janphuang P, Lockhart RA, Isarakorn D, Henein S, Briand D, RooiJ NF (2015) Harvesting energy from a rotating gear using an AFM-like MEMS piezoelectric frequency up-converting energy harvester. J Microelectromechanical Syst 24(3):742–754 114. Pozzi M (2016) Magnetic plucking of piezoelectric bimorphs for a wearable energy harvester. Smart Mater Struct 25:045008 (11pp) 115. Moon FC, Holmes PJ (1979) A magnetoelastic strange attractor. J Sound Vib 65(2):275–296 116. Nayfeh AH, Mook DT (1995) Nonlinear oscillations. Wiley-VCH 117. Kovacic I, Brennan, MJ (2011) The duffing equation: nonlinear oscillators and their behaviour. Wiley 118. Erturk A, Inamn DJ (2011) Broadband piezoelectric power generation on high-energy orbits of the bistable duffing oscillator with electromechanical coupling. J Sound Vib 330(10):2339– 2353 119. Stanton SC, McGehee CC, Mann BP (2009) Reversible hysteresis for broadband magnetopiezoelastic energy harvesting. Appl Phys Lett 95:174103 120. Stanton SC, McGehee CC, Mann BP (2010) Nonlinear dynamics for broadband energy harvesting: investigation of a bistable piezoelectric inertial generator. Phys D 239:640–653 121. Ferrari M, Ferrari V, Guizzetti M, Marioli D (2010) A single-magnet nonlinear piezoelectric converter for enhanced energy harvesting from random vibrations. Procedia Eng 5:1156–1159 122. Ferrari M, Ferrari V, Guizzetti M, Andò, Baglio S, Trigona (2010) Improved energy harvesting from wideband vibrations by nonlinear piezoelectric converters. Sens Actuators A 162:425– 431 123. Tang L, Yang Y (2012) A nonlinear piezoelectric energy harvester with magnetic oscillator. Appl Phys Lett 101:094102 124. Fan K, Tan Q, Liu H, Zhang Y, Cai M (2019) Improved energy harvesting from low-frequency small vibrations through a monostable piezoelectric energy harvester. Mech Syst Signal Process 117:594–608 125. Rezaei M, Talebitooti, Lio WH (2022) Investigations on magnetic bistable PZT-based absorber for concurrent energy harvesting and vibration mitigation: numerical and analytical approaches. Energy 239:122376 126. Mei X, Zhou R, Yang B, Zhou S, Nakano K (2021) Combining magnet-induced nonlinearity and centrifugal softening effect to realize high-efficiency energy harvesting in ultralowfrequency rotation. J Sound Vib 505:116146 127. Jiang J, Liu S, Feng L, Zhao D (2021) A review of piezoelectric vibration energy harvesting with magnetic coupling based on different structural characteristics. Micromachines 12(436) 128. Ju Y, Li Y, Tan J, Zhao Z, Wang G (2021) Transition mechanism and dynamics behaviors of a multi-stable piezoelectric energy harvester with magnetic interaction. J Sound Vib 501:116074 129. Tao-Hai L, Bo-Jian D, Fan C, Wei-Yang Q, Lan-Rui T (2022) Homoclinic bifurcation for a bi-stable piezoelectric energy harvester subjected to galloping and base excitations. Appl Math Model 104:228–242 130. Kim J, Dorin P, Wang KW (2020) Vibration energy harvesting enhancement exploiting magnetically coupled bistable and linear harvesters. Smart Mater Struct 29:065006 (10pp) 131. Yang W, Towfighian (2017) Internal resonance and low frequency vibration energy harvesting. Smart Mater Struct 26:095008 (11pp)
24
1 State-of-the-Art
132. Chandwani J, Somkuwar R, Deshmukh (2020) Experimental study on band merging of nonlinear multi-band piezoelectric energy harvester into single broadband using magnetic coupling. Microsyst Technol 26:657–671 133. Wu X, Lee DW (2018) Miniaturized piezoelectric energy harvester for battery-free portable electronics. Int J Energy Res 43:657–671 134. Baú M, Alghisi D, Dalola S, Ferrari M, Ferrari V (2020) Multi-frequency array of nonlinear piezoelectric converters for vibration energy harvesting. Smart Mater Struct 29:045947 (18pp) 135. Haghighi EF, Ziaei-Rad S, Nahvi (2021) Energy harvesting from a nonlinear magnetpiezoelectric multi-frequency converter array. Smart Mater Struct 30:105028 (11pp) 136. Li P, Xu N, Gao C (2019) Design and experimental study of broadband hybrid energy harvester with frequency-up conversion and nonlinear magnetic force. Microsyst Technol 137. Tang L, Yang Y, Soh CK (2012) Improving functionality of vibration energy harvesters using magnets. J Intell Mater Syst Struct 23(13):1433–1449 138. Chen Z, Zhang F, Xu X, Chen Z, LI W, Li F, Han J, Zhou H, Xu K, Bu L (2019) Non-contact multiple plucking method for frequency up conversion piezoelectric energy harvesters in extremely low frequency applications. In: Proceedings of transducers 2019 - EUROSENSORS XXXIII, pp 1427–1430 139. Tang QC, Yang QC, Li X (2011) Bi-stable frequency up-conversion piezoelectric energy harvester driven by non-contact magnetic repulsion. Smart Mater Struct 20:125011 (6pp) 140. Pillatsch P, Yeatman EM, Holmes AS (2014) A piezoelectric frequency up-converting energy harvester with rotating proof mass for human body applications. Sens Actuators Phys 206:178–185 141. Pillatsch P, Yeatman EM, Holmes AS (2012a) Magnetic beam plucking in a piezoelectric energy harvester with rotating proof mass. In: Proceedings of PowerMEMS 2012, Atlanta, GA, United States of America, vol 206, pp 476–479 142. Pillatsch P, Yeatman EM, Holmes AS (2014b) Magnetic plucking of piezoelectric beams for frequency up-converting energy harvesters. Smart Mater Struct 23:025009 (12pp) 143. Pillatsch P, Yeatman EM, Holmes AS (2012b) A scalable piezoelectric impulse-excited generator for random low frequency excitation. In: Proceedings of MEMS 2012, Paris, France, pp 1205–1208 144. Ramezanpuor R, Nahvi H, Ziaei-Rad S (2016) Electromechanical behavior of pendulumbased piezoelectric frequency up-converting energy harvester. J Sound Vib 370:280–305 145. Ramezanpuor R, Nahvi H, Ziaei-Rad S (2016) A vibration-based energy harvester suitable for low-frequency, high-amplitude environments: theoretical and experimental investigations. J Intell Mater Syst Struct 27(5):642–665 146. Xue T, Roundy S (2017a) On magnetic plucking configurations for frequency up-converting mechanical energy harvesters. Sens Actuators Phys 253(1) 147. Xue T, Roundy S (2017) On magnetic plucking configurations for frequency up-converting mechanical energy harvesters. Sens Actuators Phys 253:101–111 148. Shu YC, Wang WC, Chang YP (2018) Electrically rectified piezoelectric energy harvesting induced by a rotary magnetic plucking. Smart Mater Struct 27:125006 (11pp) 149. Dauksevicius R, Kleiva A, Grigaliunas V (2018) Analysis of magnetic plucking dynamics in a frequency up-converting piezoelectric energy harvester. Smart Mater Struct 27:085016 (19pp) 150. Kleiva A, Dauksevicius R (2019) Experimental study of multi-magnet excitation for enhancing micro-power generation in piezoelectric vibration energy harvester. Mechanika 25:219–224 151. Kleiva A, Dauksevicius R (2019) Numerical and experimental study of a novel body-mounted piezoelectric energy harvester based on synchronized multi-magnet excitation. In: Proceedings of EuroSime 2019, pp 383–387 152. Fu H, Yeatman EM (2019) Rotational energy harvesting using bi-stability and frequency up-conversion for low-power sensing applications: theoretical modelling and experimental validation. Mech Syst Signal Process 125:229–244 153. Mei X, Zhou S, Yang Z, Kaizuka T, Nakano K (2019) A quad-stable piezoelectric energy harvesting from rotational motion: theoretical model and experiments. Model Mech Mater 531:012010
References
25
154. Mei X, Zhou S, Yang Z, Kaizuka T, Nakano K (2021) Enhancing energy harvesting in lowfrequency rotational motion by a quad-stable energy harvester with time-varying potential wells. Mech Syst Signal Process 148:107167 155. Xie Z, Xiong J, Zhang D, Wang T, Shao Y, Huang W (2018) Design and experimental investigation of a piezoelectric rotation energy harvester using bistable and frequency up-conversion. Appl Sci 8:1418 156. Lo YC, Chen CC, Shu YC, Lumentut MF (2021) Broadband piezoelectric energy harvesting induced by mixed resonant modes under magnetic plucking. Smart Mater Struct 30:105026 157. Miao G, Fang S, Wang S, Zhou S (2022) A low-frequency rotational electromagnetic energy harvester using a magnetic plucking. Appl Energy 305:117838 158. Dai X, Wang H, Wu H, Pan Y, Luo D, Ahemd A, Zhang Z (2022) A hybrid harvesting system for self-powered applications in shared bicycles. Sustain Energy Technol Assess 51:101891 159. Bodduluri MT, Dankwort T, Lisec T, Grünzig S, Khare A, Ahmed M, Gojdka B (2022) Fully integrated high-performance mems energy harvester for mechanical and contactless magnetic excitation in resonance and at low frequencies. Micromachines 13(863) 160. Cammarano A, Neild SA, Burrow SG, Inman (2014) The bandwidth of optimized nonlinear vibration-based energy harvesters. Smart Mater Struct 23:055019 (9pp) 161. Zou D, Liu G, Rao Z, Tan T, Zhang W, Liao WH (2021) Design of vibration energy harvesters with customized nonlinear forces. Mech Syst Signal Process 153:107526 162. Pan J, Qin W, Deng W, Zhang P, Zhou Z (2021) Harvesting weak vibration energy by integrating piezoelectric inverted beam and pendulum. Energy 227:120374 163. Izadgoshasb I, Lim YY, Tang L, Padilla RV, Tang ZS, Sedighi (2019) Improving efficiency of piezoelectric based energy harvesting from human motions using double pendulum system. Energy Convers Manag 184:559–570 164. Wu Y, Li S, Fan K, Ji H, Qiu J (2022) Investigation of an ultra-low frequency piezoelectric energy harvester with high frequency up-conversion factor caused by internal resonance mechanism. Mech Syst Signal Process 162:108038 165. Ottman GK, Hofmann HF, Bhatt AC, Lesieutre GA (2002) Adaptive piezoelectric energy harvesting circuit for wireless remote power supply. IEEE Trans Power Electron 17(5):669– 676 166. Ottman GK, Hofmann HF, Lesieutre GA (2003) Optimized piezoelectric energy harvesting circuit using step-down converter in discontinuous conduction mode. IEEE Trans Power Electron 18(2):696–703 167. Guyomar D, Badel A, Lefeuvre E, Richard C (2005) Toward energy harvesting using active materials and conversion improvement by nonlinear processing. IEEE Trans Ultrason Ferroelectr Freq Control 52(4):584–595 168. Lallart M, Guyomar D, Jayet Y, Petit L, Lefeuvre E, Monnier T, Guy P, Richard C (2008) Syncronized switch harvesting applied to self-powered smart systems: Piezoactive microgenerators for autonomous wireless receivers. Sens Actuators Phys 147(1):263–272 169. Lallart M, Wu YC, Guyomar D (2012) Switching delay effects on nonlinear piezoelectric energy harvesting techniques. IEEE Trans Ind Electron 59(1):464–472 170. Silva T, Tan D, De Marqui C, Erturk A (2019) Vibration attenuation in a nonlinear flexible structure via nonlinear switching circuits and energy harvesting implications. J Intell Mater Syst Struct 30(7):965–976 171. Leadenham S, Erturk A (2014) M-shaped asymmetric nonlinear oscillator for broadband vibration energy harvesting: harmonic balance analysis and experimental validation. J Sound Vib 333:6209–6223 172. Leadenham S, Erturk A (2020) Mechanically and electrically nonlinear non-ideal piezoelectric energy harvesting framework with experimental validations. Nonlinear Dyn 99:625–641 173. Bonnin M, Traversa FL, Bonani F (2022) An impedance matching solution to increase the harvested power and efficiency of nonlinear piezoelectric energy harvesters. Energies 15:2764 174. Yan Z, Sun W, Hajj MR, Zhang W, Tan T (2020) Ultra-broadband piezoelectric energy harvesting via bistable multi-hardening and multi-softening. Nonlinear Dyn 100:1057–1077 175. Yu T, Zhou S (2021) Performance investigations of nonlinear piezoelectric energy harvesters with a resonant circuit under white gaussian noises. Nonlinear Dyn 103:183–196
Chapter 2
Physics Fundamentals
In this chapter the basic notions on piezoelectricity and magnetostatics are presented. For both topics, first, phenomenological aspects are discussed. Then the mathematical modelling is presented by means of different constitutive laws.
2.1 Piezoelectricity 2.1.1 Phenomenological Aspects Piezoelectricity is the property exhibited by some ceramic or crystalline materials, to become electrically polarized when they are deformed or, conversely, to deform when subjected to electrical voltage. The first case is well known as direct effect, and the second one as inverse effect. The early studies of this property have been made by brothers Pierre and Paul Jacques Curie in 1880 on quartz, which by nature possesses piezoelectric features [1]. Mathematical investigations about the converse effect has been derived from classical thermodynamics by Lippmann in 1881 [2]. Nowadays, these kind of materials are employed for sensing, actuation and harvesting in cutting edge devices by means of thin film deposited on the silicon micromachined substrate or even directly micromachined [3]. The piezoelectric materials typically used by the industries are artificial salts, such as lithium sulfate and ceramics such as barium titanate, lead titanate, and lead titanium zirconate (PZT, the chemical formula is Pb(Zr,Ti)O.3 ). The latter is undoubtedly the most diffused among the artificial piezoceramic and it was developed by Yutaka Takagi, Gen Shirane and Etsuro Sawaguchi, at the Tokyo Institute of Technology, around 1952 [4]. The reason of its popularity is attribuited to high piezoelectric coefficients (i.e. excellent transduction properties). It is basically an oxide of Lead, Zirconium and Titanium disposed in a Perovskite crystalline structure to compose a set of elementary cells. Each cubic cell contains a central atom of Titanium or Zirconium. Given the symmetry of the atomic arrange© The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5_2
27
28
2 Physics Fundamentals
Fig. 2.1 Top, left to right: example of PZT crystal and AlN, from [5]. Botton: illustration of the polarization process
ment, in the absence of stress, the structure has no polarity of electrical charges. Under the action of an electric field or mechanical stress, the central atom moves away from the center of the lattice causing an imbalance in the charges which originates an electric dipole as indicated in Fig. 2.1. Before being considered operational for technical purposes, such materials must be polarized. The polarization is a process by which dipoles within the material are oriented through the following steps: first, the material is heated up to the Curie temperature at which a phase transition occurs in the structure of the crystal. There is a migration from asymmetric to symmetric, that causes the loss of piezoelectricity. The aforementioned steps are illustrated in Fig. 2.1. Thus, an intense electric field is applied to align the domains of polarization according to the direction of the applied field. Then, the material is cooled and the electric field is removed. Because of that, the crystal locks the orientation of the domains, which remains even after the removal of the previously applied electric field. The result is a residual polarization with the dipoles oriented in the direction of the field. Piezoelectric materials are generally characterized by good manufacturability. They suffer from aging phenomena that can lead to depolarization. Piezoelectric properties decay more rapidly if the material is subjected to strong electric fields opposite to the polarizing field and also if subjected to temperatures above the Curie temperature. They also exhibit nonlinear behavior and hysteresis. With reference to a general piezoelectric material fiber, under the action of and external electric field along the polarization direction, the experimental behavior is typically described by the so-called butterfly loop qualitatively illustrated in Fig. 2.2.
2.1 Piezoelectricity
29
Fig. 2.2 Left: qualitative butterfly loop of piezoelectric materials, right: linearized butterfly loop
The diagram represents the nonlinear behaviour of the material and it is the result of the following phenomena: branch A: the application of an external electric field moves the central atom in the same direction of the field. The result is an elongation of the fiber and a polarization of the material; branch B: by removing the electric field the fiber contracts and the central atom goes back to the initial position at a different rate; branch C: the electric field changes sign and the material contraction goes on; branch D: at a certain intensity of the electric field, the central atom reach its initial position. For lower intensity, the atom starts displacing in the other direction and the material begins to elongate again, polarizing oppositely; branches E-F-G: the B-C-D behaviour is repeated as the electric field is increased instead of reduced. If the electric field is sufficiently low, nonlinearities can be neglected and a simplified model can be adopted with linearization of the upper and the lower branches. In that case a constant electric field E.C must be introduced to set the value at which the change of polarization direction occurs. PZT is a polluting intermetallic compound and researchers worked to find also solutions using Lead-free materials [6, 7]. To avoid the presence of lead in piezoelectric materials, a possibility is to exploit the Aluminum Nitride AlN as proposed already in 2007 by Shrout et al. [6]. It is a piezoelectric material with a Wurtzite hexagonal crystal. Although its piezoelectric coefficients are ten times smaller than the PZT ones, it has been used in many applications, such as microwave filters [8]. It is usually used in sensors [9] because it does not provide high enough electromechanical coefficients necessary for actuation, and it is characterized by good manufacturability.
30
2 Physics Fundamentals
2.1.2 Mathematical Modeling In the following the notation adopted by the IEEE Standard on piezoelectricity is adopted [10]. Let us consider a piezoelectric body with volume .V and lateral surface .∂V . The surface is composed of a free and a constrained part that are respectively named as .∂V f and .∂Vb (.∂V = ∂V f ∪ ∂Vb ). Over the body act body forces . Fi and surface forces . f i varying in time. The dynamic equilibrium leads to the Eq. (2.1) and compatibility to the Eq. (2.2). { Ti j, j + Fi = ρs¨i , in V . (2.1) on ∂V f Ti j · n j = f j , { .
Si j = 21 (si, j + s j,i ), in V on ∂Vb si = s i ,
(2.2)
where .i, j = 1, 2, 3 according to a reference system. In the Eq. (2.1), .Ti j and . Si j are the stress and strain second order tensor components,.ρ is the mass density of the body, .s ¨i are the components of the acceleration vector and .si and .s i displacement vector and its value assigned at the boundary of the domain. It is then possible to formulate the electrical counterpart. On the same body with volume .V is supposed acting a volume charge density .ρ and a charge distribution .q on a portion of the surface .∂Vq . The Gauss’s Law imposes equality between volumetric charge and the divergence of the electric displacement vector . Di,i inside the domain. The distribution .q equals, in absolute value, the normal component to the surface of the electric displacement (2.3). { Di,i = ρV , in V . (2.3) Di · n i + q = 0, on ∂Vq Electric compatibility conditions must be added to the equilibrium Eqs. 2.3. In the body the electric field . E is conservative and, consequently, it is possible to define an electric potential .φ that satisfies the first of the system Eq. (2.4). On a certain portion of the surface called .∂Vφ a potential value can be assigned .φ. { E i = −φ,i , in V . (2.4) on ∂Vφ φ = φ, At this point, to link the mechanical description of the problem with the electrical one caused by the piezoelectric effect, a constitutive law is needed. The modelling of piezoelectric materials has been the object of intense research activity in the past years. Constitutive models can be simply classified as linear or nonlinear according with their mathematical formulation. Nonlinear models can be conservative (if reversible) or nonconservative (if not reversible). Generally speaking, material non-
2.1 Piezoelectricity
31
linearity arises with sufficiently high magnitude of stresses, strains or electric field. Nonconservative behavior is typically due to ferroelastic hysteresis or dielectric hysteresis (i.e. internal sources of material damping). In the following, a description of some models is presented. The formulation of a continuum problems starts with thermodynamics considerations. Tiersten in his book derived [11] (1969) the equation representing the first law of thermodynamics for the piezoelectric medium: U˙ = Ti j S˙i j + E i D˙ i
.
(2.5)
in which .U is the internal energy the dot notation ( ˙) . means that ( ) is considered in terms of rates. It is then possible to define [12] the electric enthalpy density . H : .
H = U − E i Di
(2.6)
By differentiating in time Eq. (2.6) and combining it with the Eq. (2.5) it can be obtained: .
H˙ = Ti j S˙i j − Di E˙ i
(2.7)
The Eq. (2.7) implies that the electric enthalpy is a function of both mechanical strain and the electric field: .
H = H (S, E)
(2.8)
Stresses and electric displacements can be then computed using the following relations: T =
. ij
.
∂H ∂ Si j
Di = −
∂H ∂ Ei
(2.9)
(2.10)
The previous Eqs. (2.5)–(2.10) are of general validity. The key role in the modeling is the assumption of a well-suited enthalpy function which may contain or not inherent nonlinearities of the material. The nonlinearities taken into account by the enthalpy are reversible. Different sources of dissipation are then taken into account separately in the form of nonconservative work on the body.
2.1.2.1
Linear Piezoelectricity
As previously mentioned, under sufficiently low stresses, strains and electric fields, the linear approximation of the piezoelectric behavior is reasonable. Nature is non-
32
2 Physics Fundamentals
linear, linearity is just a way to have a simplified overview of complex phenomena. In linear piezoelectricity, the enthalpy density is assumed as: .
H=
1 E 1 ci jkl Si j Skl − eki j E k Si j − εis j E i · E j 2 2
(2.11)
where the .i, j, k, l define the tensors components and they are equal to .1, 2 or .3. c E represents the components of the elastic stiffness fourth order tensor. The apex “. E” means that the stiffness is evaluated at constant electric field; .eki j represents the components of the piezoelectric stress third order tensor; .εiSj represents the components of the electric permittivity second order tensor. The apex “. S” means that the permittivity is evaluated at constant strain. This physical quantity indicates the propensity of the material to oppose an applied electric field. By using the relations (2.9), (2.10) it is possible to obtain the linear piezoelectricity constitutive equations in the so called e-form, with tensorial notation:
. i jkl
T = ciEjkl Skl − eki j E k
(2.12)
Di = eikl Skl + εiSj E k
(2.13)
. ij
.
the consitututive law can be also written in terms of mechanical strains in the so called d-form: S = siEjkl Tkl − dki j E k
(2.14)
T Di = dikl Tkl + εik Ek
(2.15)
. ij
.
In this case .siEjkl represents the components of the elastic compliance fourth order tensor. The apex “. E” means that the stiffness is evaluated at constant electric field; T .dki j represents the components of the piezoelectric stress third order tensor; .εik represents the components of the electric permittivity second order tensor, measured at constant mechanical stress. The constitutive equations describe the coupling between mechanical and electrical quantities by means of the piezoelectric tensors, .eki j (in case of the e-form) or .dki j (in case of the d-form). The physical meaning of this tensor can be easily explained. Let us assume that the polarization direction is identified by the index 3. As illustrated also by the Fig. 2.3, three basic mechanisms of coupling arise: 33-mode: the application of an electric field along the polarization axis of the piezoelectric medium stretches in the same direction and viceversa; 31-mode: the application of an electric field along the polarization axis of the piezoelectric medium stretches in the orthogonal plane and viceversa; shear-mode: the application of an electric field in the orthogonal plane to the polarization axis causes a shear in the element plane.
2.1 Piezoelectricity
33
Fig. 2.3 From left to right: 33, 31, shear piezoelectric modes Table 2.1 Notations for stresses
Table 2.2 Notations for strains
Table 2.3 Notations for piezoelctric stress constants
Tensorial notation
Voigt’s notation
. T11
. T1
. T22
. T2
. T33
. T3
. T13
. T4
. T23
. T5
. T12
. T6
Tensorial notation
Voigt’s notation
. S11
. S1
. S22
. S2
. S33
. S3
. S13
. S4
. S23
. S5
. S12
. S6
Tensorial notation
Voigt’s notation
.e333
.e33
.e311
.e31
.e322
.e32
.e113
.e15
.e223
.e24
According to the assumption on the polarization direction, the only non-zero piezoelectric stress constants are: .e333 that is related to 33-mode, .e311 and .e322 are equal due to thermodynamics reasons and they are related to the 31-mode. .e113 and .e223 are equal too and related to the shear mechanism. According to the Standards on Piezoelectricity it is possible to use the Voigt’s notation for stresses and strains (see Tables 2.1 and 2.2) and for the piezoelectric constants (Tables 2.3 and 2.4). The electric displacement, the electric field and the electric permittivity are expressed in the same way for both notations. At this point, it is then possible to write the constitutive equations in the e-form with the Voigt’s notation.
34
2 Physics Fundamentals
Table 2.4 Notations for piezoelectric strain constants
Tensorial notation
Voigt’s notation
.d333
.d33
.d311
.d31
.d322
.d32
.d113
.d15
.d223
.d24
.
T p = c Epq Sq − ekp E k
(2.16)
S Di = eiq Sq + εik Ek
(2.17)
.
with .i, k, p, q = 1, 2, 3. An important parameter for the piezoelectric material is the so-called piezoelectric coupling coefficient .κi j , and it defines the transduction capability of a piezoelectric material: ei j κ =/ ciEj εiiS
. ij
(2.18)
Piezoelectric materials are typically transversely isotropic and according to the IEEE Standard the plane of isotropy is defined as the 12 [13]. In other words, they exhibit symmetry about the poling axis, identified by the index 3.
2.1.2.2
Nonlinear Piezoelectricity
Above certain magnitudes of electric field and/or mechanical strains, inherent nonlinearities are not negligible to have good predictions of the material behavior described by linear mathematical models. The IEEE Standard does not contain a rigorous treatment of nonlinearities. For this reason, the research over the past years pushed a lot to have good mathematical description of material nonlinearities. Nonlinearities in piezoelectric materials come from different sources, such as nonlinear elasticity, coupling, mechanical or dielectrical losses. At the same time, nonlinear phenomena are very complex and often it is not possible to have a complete treatment of the material behavior. For this reason, by analyzing the literature that will be presented in the following, it is clear that the researchers focused on specific sources of inherent nonlinearities that often are implicitly related to some kind of application (sensing, actuation, energy harvesting). Even so, two main conceptual approaches of general validity are adopted: reversible inherent nonlinearities are modelled by introducting high-order polynomial as enthalpy function, nonreversible (or nonconservative) inherent nonlinearities are modelled through specific hysteretic behaviors. Erturk and his group, recently unified reversible and nonconservative behaviors in a single model for energy harvesting, sensing, and actuation [14].
2.1 Piezoelectricity
2.1.2.3
35
Nonlinear Conservative Piezoelectricity
As mentioned before, reversible nonlinearities are introduced by means of nonlinear terms in the enthalpy function (or other thermodynamic functionals). After general investigations carried out by Maugin [15] and Tiersten [16] on piezoelectric material, specific investigations for actuated beams have been carried out. Aurelle et al. [17] under low electric field hypothesis over the piezoelectric layers introduced nonlinearities related to strains and the electromechanical coupling. In that case, the modelling has been proposed directly on the stresses expression: T = c11 S1 − e31 E 3 + α111 S12 + γ311 S1 E 3
. 1
(2.19)
where .α111 and .γ311 are the nonlinear elastic and coupling coefficients respectively. Attenuations in linear damping from their experiments is attribuited to the electromechanical coupling term. Later, the same group [18] justified that interpretation by showing that the term related to the square of the electric field is negligible. Wolf and Gottlieb [19] considered an enthalpy density with second and third order elastic dependence for the stress expression by means of.c3 and.c4 coefficients. They decided to consider linear dependence from the electric field and coupling: .
H=
1 1 1 1 c11 S12 − e31 E 3 S1 − ε33 E 32 + c3 S13 + c4 S14 2 2 6 24
(2.20)
Nonlinearity related to strains and coupling have been taken into account in the model by Von Wagner and Hagedorn in 2002 [20] with the following assumption for the enthaply function: 1 1 1 1 1 1 c0 S12 + c1 S13 + c2 S14 − γ0 S1 E 3 − γ1 S12 E 3 − γ2 S13 E 3 − ν0 E 32 2 3 4 2 3 2 (2.21) where .c1 , .c2 , .γ1 , and .γ2 are the nonlinear coefficients. From the aforementioned actuation models it is unclear whether nonlinear electromechanical coupling can be excluded or not. Other models have been developed for energy harvesting. Two years later, Arafa and Baz [21] assumed the Gibbs free energy instead of the enthalpy as thermodynamic potential, with the following expression: .
.
H=
G=
1 1 α β γ δ c11 S12 − e31 S1 E 3 − ε33 E 32 + S13 + S1 E 32 − S12 E 3 − E 33 2 2 6 2 2 6
(2.22)
where .α, .β, .γ, .δ are the nonlinear coefficients. The above assumption leads to the following quadratic equations of stresses and electric displacement: 1 1 T = c11 S11 − e31 E 3 + αS12 + β E 32 − γ S1 E 3 2 2
. 1
(2.23)
36
2 Physics Fundamentals
.
1 1 S D3 = e31 S11 + ε33 E 3 + γ S12 + δ E 32 − β S1 E 3 2 2
(2.24)
The modelling for energy harvesting purposes takes into account low electric fields and such models are presented in the next section together with nonlinear damping (i.e. nonconservative effects).
2.1.2.4
Nonlinear Nonconservative Piezoelectricity
In addition to the nonlinearities presented above, dissipative effects also typically represent possible sources. Stanton et al. in [22–24] introduced high order strain electromechanical coupling and attributed the peak attenuation for high magnitude of inertial effects to a quadratic damping term [25]. In a second time, they specifically adapted the problem for energy harvesting by removing higher-order coupling effect that is more present in actuation. The derived stress equation was: T = ES1 − e31 E 3 + c3 S12 + c4 S13 + c5 S14 + c6 S15
. 1
(2.25)
Stanton and coworkers added the nonlinear nonconservative effects by means of nonlinear damping forces in the electromechanical equations of motion. Another approach can be found in other works. These kind of nonlinearities are related to a dependence between the material features and its load history, such phenomenon is called hysteretic behavior. A lot of complex models can be found in literature that take into account the hysteresis on the electromechanical coupling ([26–28]). However, in the field of energy harvesting, in which the electric field is well below the coercive value, a simplified approach can be adopted, by considering only ferroelastic hysteresis. The latter is only related to stress-strain amplitudes. Goldschmidtboeing et al. [29] derived a model for piezoelectric cantilever beams in which nonlinearities due to elasticity and coupling are completely neglected, and only nonlinear ferroelastic effects are considered. The derived consitutive equation for the stresses is: . T1 = c11 (1 − α|S1 |)S1 − e31 E 3 (2.26) the energy density dissipation is assumed as: Udiss =
.
4 γc11 |S1 |3 3
(2.27)
α and.γ represent the parameters related to the softening and dissipative effect respectively. More recently, Leadenham and Erturk [14], combined the assumption on the enthalpy density of Von Wagner and Hagedorn with the assumption of energy dissipation of Goldschmidtboeing:
.
2.2 Magnetostatics
.
H=
37
1 1 1 1 c11 S12 + c111 S13 sgn(S1 ) − e31 S1 E 3 − e311 S12 sgn(S1 )E 3 − ε33 E 32 2 3 2 2 (2.28) Udiss ∝ |S1 |3
.
(2.29)
with those assumptions they developed the so-called unified electroelastic nonconservative model. The model exhibited excellent agreement of the experimental responses with numerical simulations for actuation (i.e. fixed law of input voltage) and energy harvesting (i.e. fixed law of acceleration at the clamp of a bimorph). The Eq. (2.28) expresses the enthaply as a function of the strain magnitude rather the strain itself. In this way, when applying such model to a symmetric layering, the second order term does not vanish. The model assumes quadratic stiffness nonlinearity. This assumption leads to the linearity of the so-called backbone curve. According to Nayfeh and Mook [30], and Cveticanin et al. [31], the backbone curve is the curve connecting points of maximal response amplitude as a function of an external forcing frequency. It is a relevant and experimentally observable curve [32]. The hypothesis of linear backbone curve matches perfectly with the experimental result. The latter model will be applied in the following of this work together with its experimental studies. It is important to mention that, in different context from energy harvesting, also ferroelectric and dielectric hysteresis have been considered [33–35].
2.2 Magnetostatics 2.2.1 Phenomenological Aspects The matter exhibits magnetic properties when subjected to a magnetic field undergoing mechanical action and changes the field itself. The effect is very similar to that exhibited by a dielectric medium immersed in an electrostatic field. These properties are related to the complex atomic nature of matter, which in fact consists of distributions of electrons around a nucleus. The latter, are assimilated to microscopic coils traversed by (microscopic) currents. Therefore, each of them is equivalent to a magnetic dipole. This interpretation is based on the well-known Ampere’s equivalence theorem [36] (1820). In the absence of a local magnetic field internal to the matter, all dipoles are randomly oriented and their resulting magnetic moment over a generic volume is zero. This means that the material does not generate any macroscopic magnetic effect. The presence of an external magnetic field, physically identified by a vector H generates a phenomenon called polarization or magnetization, also identified by a vector M. In that case there are changes in terms of dipole orientation and the internal magnetic moment of the element of matter considered is no longer zero, an overall dipole of the material is generated (Fig. 2.4). This is equivalent to think that there are electrical microscopic atomic current in the medium. According with Coey [37], Faraday was one of the first to classify the matter depending on
38
2 Physics Fundamentals
its response to a magnetic field. More in detail, materials can be classified in three gropus: diamagnetic materials: in which the atoms and molecules of the medium, under the action of an external magnetic field, acquire an induced magnetic moment directed in the opposite direction from the induced. The magnetic field is therefore decreased within the material medium. Diamagnetism is a property exhibited by all materials, but often it is so weak as to be masked by other magnetic behaviors. Paramagnetic materials: in presence of an external magnetic field the equilibrium conditions are established between the tendency of their dipoles to orient themselves according to the field and the disorienting action of the thermal agitation. The result is a magnetization of the medium having the same direction of the applied magnetic field. Ferromagnetic materials: they exhibit spontaneous magnetization, (i.e. non-zero magnetic moment over a unit volume) even in the absence of an external magnetic field. Their magnetization is typically very high, and they reach the saturation value (i.e. the maximum that the material can reach) for low magnitude of external field. It can be stated that the phenomenon is similar to the paramagnetic one but stronger. Inside these materials there are some zones called Weiss domains which are already magnetized by nature. In each domain, the atoms exhibit magnetic dipole moments aligned along a particular axis called the axis of magnetization. In the absence of an external magnetic field, the individual domains are randomly oriented but they can orient themselves easily even with weak external fields, in the direction of the applied field. If the external field is removed, the domain can remain irreversibly oriented and a permanent magnetization of the material occurs. Typically the reached value of magnetization and the orientation can be mantained for a long time. The last class of materials is better suited to the realization of permanent magnets which will then be presented. Unlike paramagnetic and diamagnetic materials, in case of ferromagnetic materials the relationship between the magnetization and the external applied field is not linear and an hysteretic behavior is also observed. The constitutive behavior is qualitatively represented in Fig. 2.4, in which . Ms is the magnitude of the saturation magnetization and it represents the value of maximum magnetization for the material. . Hs is the magnitude of saturation field and it is the external value of magnetic field at which . Ms is reached. . Mr is the magnitude of the so called remanent magnetization and it is the magnetization value in the material when the applied external field H is zero. . Hc is the magnitude of the coercive field and it represents the value of external field at which the ferromagnetic material loses its magnetization. The description of the behavior is the following: starting from zero, increasing the external field H, the magnetization increases in a nonlinear way until the saturation . Ms . Further increase of the external field is useless on the magnetization. At that point, if the external field decreases until zero, a reversible effect in the magnetization (. Mr ) is observed. By decreasing furtherly the external field below zero, it is possibile to reach a zero value of magnetization at the aforementioned coercive value. Below that value the magnetization changes its sign.
2.2 Magnetostatics
39
Fig. 2.4 From left to right, typical hysteresis loop of a ferromagnet. Schematic of a ferromagnetic material with random magnetic domains orientation (top) and domains lined-up in series after a magnetization process (bottom)
Fig. 2.5 From left to right, typical range of coercivity of magnetic materials during the twentieth century, Temperature dependence of the spontaneous magnetization of nickel, from Coey [37]
An important role in the magnetic behavior of a ferromagnets, however, is played by the temperature. If the temperature of a ferromagnetic material is raised above a critical value, called the Curie temperature, most of the substances become paramagnetic for complex reasons related to quantum physics. An example of ferromagnetic material is iron, its Curie temperature is 1043 K. Other common ferromagnetic materials are Nickel and Cobalt, and the typical temperature-dependent behavior of the saturation value for the Nickel is depicted on the right side of the Fig. 2.5. It is then possible to divide the ferromagnetic materials in two categories: soft and hard. These classification originated from the mechanical properties of the corresponding magnetic steels [37]. In hard ferromagnetic materials, large variations in external magnetic field causes slight variations in their magnetizations. They typically have broad, square .M(H) loops, as depicted in Fig. 2.6. The value of saturation field . Hs and the saturation magnetization . Ms are similar to their remanent magnetization . Mr . Soft magnetic materials have very narrow loops Fig. (2.6). They are
40
2 Physics Fundamentals
Fig. 2.6 From left to right, schematic illustration of hard and soft hysteresis loop for ferromagnetic materials
temporary magnets, They quickly lose their magnetization when the external field is removed. In this case even slight variations in the external field lead large variations in the magnetization of the material. Their hysteresis loop is characterized by low values of saturation field . Hs and a saturation magnetization value . Ms similar to their remanent magnetization value . Mr . To have an electromechanical system in which magnetic forces provided by permanent magnets are exploited, it is necessary to use a material that is influenced as little as possible from external magnetic sources and so, the hard ferromagnetic material fits perfectly this need.
2.2.2 Mathematical Modelling Basic assumption of the magnetostatics, which is a branch of the electromagnetism, is the fact that the involved magnetic fields do not depend on time. In other words, the electrical current generating the magnetic fields are constant and the well-known Maxwell’s equations simplify. By considering again the previously decribed ferromagnetic materials, the M-H behavior could be, in general, mathematically simplified by means of two linear branches: a first linear branch having a certain slope that is called magnetic susceptibility .χm which is a dimensionless scalar and a second branch with a zero-slope set at the value of saturation . Ms . The constitutive law in the first branch is the following equation: M = χm H
.
(2.30)
For the paramagnetic materials .χm is very small (.∼ 10.−5 –10.−2 ) and positive, for diamagnetic materials .χm is negative (.∼ –10.−5 ), and ferromagnetic materials have very high values of .χm . The Eq. (2.30) is based on the assumpion of isotropic
2.2 Magnetostatics
41
material. In more complex cases, the susceptibility may be independent in three independent directions and becomes a symmetric second-rank tensor .χm,i j . Consequently, Eq. (2.30) becomes a tensor relation [37]. The mathematical formulation of magnetostatics in the matter follows the so-called second and fourth Maxwell’s equations in local form. If the volume of a current free region is called .Ω and its external surface .∂Ω, the aforemetioned equations are respectively: ∇ ·B=0
.
∇ ×H=0
.
in Ω in Ω
(2.31)
(2.32)
where.B is the magnetic flux density vector. The Eq. (2.31) is also called Gauss’s magnetic Law and imposes null divergence for the magnetic flux density. The Eq. (2.32) instead, is also called Ampère’s circuital Law and it equals to zero the curl of the magnetic field intensity. Since .H is defined in a simply connected domain, it is possible to define a magnetic scalar potential .ϕm that satisfies: H = −∇ϕm
.
in Ω
(2.33)
It is then assumed a linear constitutive relation between the magnetic flux density and magnetic field: B = μ0 (H + M)
.
(2.34)
where.μ0 is the magnetic vacuum permeability equal to 4.ß10−7 H/m. It is then possible to substitute the Eq. (2.30) in the 2.34: B = μ0 (H + χm H) = μ0 H(1 + χm )
.
(2.35)
At this point it is possible to introduce the relative permittivity of the magnetic medium as: μ = 1 + χm
. r
(2.36)
and by defining the global permittivity as the product between the relative one and the void related: .μ = μr μ0 (2.37) It is obtained the relationship between the magnetic flux density and the magnetic field: B = μH
.
(2.38)
42
2 Physics Fundamentals
Equations (2.31)–(2.34) must be considered together with the boundary conditions (BCs). A Neumann BC, also called insulation equation, can be applied on symmetry planes where the magnetic field is tangential to the plane: n · B =0
.
on
∂Ωins
(2.39)
where .n is the normal outward unit vector and .∂Ωins is the insulated surface. In case the magnetic field is orthogonal to the boundary, a constant value of the magnetic potential leads to impose a Dirichlet BC: ϕm = ϕ¯
.
on
∂Ω pot
(2.40)
where .ϕ¯ is the prescribed magnetic potential value at the boundary .∂Ω pot . By substituting the constitutive relation 2.34 in the Gauss’s law, and exploiting the magnetic potential, it is possible to obtain the following scalar equation: .
− ∇ [μ0 (∇ϕm − M)] = 0
in
∂Ω
(2.41)
Finally, the magnetostatics problem is considered solved once that the magnetic scalar potential.ϕm is evaluated at each spatial point of the assigned domain. The magnetic force could then be computed by integrating over the surface of the permanent magnet .∂Ωmagnet the Maxwell’s stress tensor.
Fmag
.
1 =− 2
{ ∂Ωmagnet
[ ] n(H · B) + (n · H) · BT d S
on
∂Ωmagnet
(2.42)
The present section gave a general overview of magnetostatic phenomena. Further insights into these phenomena are provided in specialized books [38–41]. In the following, the work will be focused mainly on the calculation of the magnetic force exchanged between (hard) permanent magnets that will be exploited for enhancing the performances of PVEHs.
References 1. Curie P, Curie J (1880) Dèveloppement par compression de l’électricité polaire dans les cristaux hémiédres ò faces inclinées. Bulletin de la Société minéralogique de France 3(4):90–93 2. Lippmann G (1881) Principe de la conservation de l’électricité, ou second principe de la théorie des phénomènes électriques. J Phys Theor Appl 10(1):381–394 3. Trolier-McKinstry S, Muralt P (2004) Thin film piezoelectrics for MEMS. J Electroceramics 12:7–17 4. Sunar M (2018) Piezoelectric materials. Compr Energy Syst 2:696–719 5. Wikipedia website. https://en.wikipedia.org/wiki/aluminiumnitride 6. Shrout TR, Zhang SJ (2007) Lead-free piezoelectric ceramics: alternatives for PZT? J Electroceramics 19
References
43
7. Takenaka T, Nagata H, Hiruma Y (2008) Current developments and prospective of lead-free piezoelectric ceramics. Jpn J Appl Phys 47(5):3787–3801 8. Dubois MA, Muralt P (1999) Properties of aluminum nitride thin films for piezoelectric transducers and microwave filter applications. Appl Phys Lett 74(20):3032–3034 9. Gregory OJ, Slot AB, Amons PS, Crisman EE (1996) High temperature strain gages based on reactively sputtered AlN.x thin films. Surf CoatS Technol 88:79–89 10. IEEE (1987) Standard on piezoelectricity, vol 176 11. Tiersten HF (1969) Linear piezoelectric plate vibrations. Springer 12. Mason WP (1950) Piezoelectric crystals and their application to ultrasonics. Van Nostrand, New York 13. Erturk A, Inman DJ (2011) Piezoelectric energy harvesting. Wiley 14. Leadenham S, Erturk A (2015) Unified nonlinear electroelastic dynamics for a bimorph piezoelectric cantilever for energy harvesting, sensing, and actuation. Nonlinear Dyn 79:1727–1743 15. Maugin GA (1985) Nonlinear electromechanical effects and applications. World Scientific, Singapore 16. Tiersten HF (1993) Electroelastic equations for electroded thin plates subjected to large driving voltages. J Appl Phys 74:3389–3393 17. Aurelle N, Guyomar D, Richard C, Gonnard P, Eyraud L (1996) Nonlinear behavior of an ultrasonic transducer. Ultrasonics 34:187–191 18. Guyomar D, Aurelle N, Eyraud L (1997) Piezoelectric ceramics nonlinear behavior. Application to Langevin transducer. J De Physique III (7):1197–1208 19. Wolf K, Gottlieb O (2001) Nonlinear dynamics of a cantilever beam actuated by piezoelectric layers in symmetric and assymetric configuration. Technion-Israel Institute of Technology, Technical Report ETR-2001-02 20. Von Wagner U, Hagedorn P (2002) Piezo-beam systems subjected to weak electric field: experiments and modelling of non-linearities. J Sound Vib 256:861–872 21. Arafa M, Baz A (2004) On the nonlinear behavior of of piezoelectric actuators. J Vib Control 10:387–398 22. Stanton SC, Erturk A, Mann BP, Inman DJ (2010) Nonlinear piezoelectricity in electroelastic energy harvesters: modeling and experimental identification. J Appl Phys 108:74903 23. Stanton SC, Erturk A, Mann BP, Inman DJ (2010) Resonant manifestation of intrinsic nonlinearity within electroelastic micropower generators. Appl Phys Lett 97:254101 24. Stanton SC (2011) Nonlinear electroelastic dynamical systems for inertial power generation. PhD thesis, Duke University, Durham 25. Stanton SC, Erturk A, Mann BP, Dowell EH, Inman DJ (2012) Nonlinear nonconservative behavior and modeling of piezoelectric energy harvesters including proof mass effects. J Intell Mater Syst Struct 23:183–199 26. Bouc R (1971) Modèle mathématique d’hystérésis. Acustica 21:16–25 27. Wen YK (1976) Method of random vibration of hysteretic systems. J Eng Mech Div 102:246– 263 28. Silva LL, Savi MA Jr, Monteiro PC, Netto TA (2013) Effect of the hysteretic behavior on the vibration-based energy harvesting. J Intell Mater Syst Struct 24(103):1421–1430 29. Goldschmidtboeing F, Eichhorn C, Wischke M, Kroener M, Woias P (2011) The influence of ferroelastic hysteresis on mechanically excited PZT cantilever beams. In: Proceedings of the 11th international workshop on micro and nanotechnology for power generation and energy conversion applications, pp 114–117 30. Nayfeh AH, Mook DT (1995) Nonlinear oscillations. Wiley-VCH 31. Cveticanin L, Zukovic M, Balthazar JM (2017) Dynamics of mechanical systems with nonideal excitation. Springer 32. Breunung T, Haller G (2018) Explicit backbone curves from spectral submanifolds of forceddamped nonlinear mechanical systems. Proc R Soc Math Phys Eng Sci 474:20180083 33. Frangi A, Opreni A, Boni N, Fedeli P, Carminati R, Meli M, Mendicino G (2020) Nonlinear response of PZT-actuated resonant micromirrors. J Microelectromechanical Syst 29:1421– 1430
44
2 Physics Fundamentals
34. Damjanovic D (2001) Hysteresis in piezoelectric and ferroelectric materials. Sci Hysteresis 3:219–268 35. Kamlah M (2001) Ferroelectric and ferroelastic piezoceramics - modeling of electromechanical hysteresis phenomena. Contin Mech Thermodyn 13(4):219–268 36. Serway RA, Jewett JW (2004) Physics for scientists and engineers, 6th edn. Thomson Brooks 37. Coey JMD (2009) Magnetism and magnetic materials. Cambridge University Press, New York 38. Cullity BD, Graham CD (2009) Introduction to magnetic materials. Published by John Wiley & Sons Inc., Hoboken, New Jersey, United States of America 39. Furlani EP (2001) Permanent magnet and electromechanical devices: materials, analysis, and applications. Academic Press, San Diego, CA, USA 40. Blundell S (2001) Permanent magnet and electromechanical devices: materials, analysis, and applications. Oxford University Press Inc., New York, USA 41. Nesbitt EA, Wernick JH (1973) Rare earth permanent magnets. Academic Press, New York, USA
Chapter 3
Piezoelectric Vibration Energy Harvesters (PVEH)
This chapter presents the modelling of piezoelectric cantilever energy harvesters. First, a general overview of modelling strategies is given. The focus is then moved toward lumped-parameters models. A layered beam energy harvester model is derived based on the classical Euler-Bernoulli assumptions and linear constitutive law. Next, a one-dimensional model taking into account three-dimensional effects is presented, again with linear piezoelectricity. Then an in-depth study of a nonlinear, nonconservative electroelastic model is presented, which has been appropriately calibrated through experimental activities.
3.1 Introduction As previously described, the basic piezoelectric vibration energy harvester (PVEH) is a layered cantilever beam or plate. A tip mass can be put on the cantilever to match a certain resonant frequency. The modelling of these kind of structures has been largely studied in the past [1–4] and not only for energy harvesting purposes [5, 6]. The considered systems are vibrating structures whose properties of mass and stiffness vary with continuity in the geometry. A rigorous study would require the introduction of infinite number of kinematic variables to describe the motion, the so-called Lagrangian coordinates [7]. This approach is called distributed approach and it provides to model the structural response through partial differential equations (PDEs) whose closed-form integration is possible only for simple cases in terms of structural scheme, boundary conditions and initial conditions. Actually, for cantilever beam structures, the approach is feasible and it has been widely applied by Erturk and Inman [3]. Another prossible strategy is the discretization approach. It provides assuming a finite number of Lagrangian coordinates, or degrees-of-freedom (DOFs) [7], to describe the physical problem. Typically, in a purely mechanical system, DOFs © The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5_3
45
46
3 Piezoelectric Vibration Energy Harvesters (PVEH)
are represented by displacements or rotations of some points, whereas in the case of multiphysics systems (e.g. piezoelectric) they can be also other kinds of physical variables, such as voltage or electrical charge at some points. The reduction to a finite number of variables makes the problem representable with a set of ordinary differential equations (ODEs). Generally speaking, system of the latter kind are more suitable for automatic processing. In this work, the lumped-parameter approach is used, which belongs at the framework of discretization methods. In that case, the dynamics of the system is described at a certain point of the structural domain in terms of equivalent lumped parameters of mass, stiffness, damping (and others in the multiphyisics field). The equivalent (lumped) properties are derived from basic assumptions about the modal response of the system that will be shown in the following.
3.2 Linear Theories Linear theories are based on linear assumptions about the overall behavior of the system. The modelling hypotheses of linearity taken into account are summarized below: • linear kinematics. A linear relation between displacement and strain is considered via compatibility equations. This is reasonable if the strains are small enough. • Linear constitutive behavior is assumed for both the active material and the structural layers. Then, the structural model is based also on other assumptions: • the layered cantilever energy harvester is a slender beam, and thus, Euler-Bernoulli beam theory is assumed. The hypothesis of the theory is that: plane sections orthogonal to the neutral axis of the beam remain orthogonal to the same after deformation process. Actually, for a laminated section, such theory is not appropriate since shear deformations are not negligible. However, the kinematic assumption mantains good reliability if the laminate cross-section is very thin and the elastic moduli and the Poisson’s ratios are in the same order of magnitude for the materials in the layering. • The cross-sectional behavior is modelled by means of the classical lamination theory (CLT) which assumes perfect adherence between the layers beyond the aforementioned kinematic hypothesis and material linearity. • The axial deformation of the beam is neglected, which implies that the axial vibration is not considered.
3.2 Linear Theories
47
3.2.1 Classical Euler-Bernoulli The first step of the modelling is the assumption of a mathematical model for the kinematics and for the electric behavior of the cantilever represented in Fig. 3.1.
Beam Kinematics Let us define the orthogonal reference system in which .x1 refers to the longitudinal axis of the beam, .x2 to the direction of the width and .x3 is oriented in the direction of the layering. The assumed kinematic behavior is depicted in Fig. 3.2. The adopted kinematic model, under the hypothesis of small displacements is the following: { s1 (x1 , x3 ) = u 1 (x1 ) − x3 ∂u∂3x(x1 1 ) (3.1) . s3 (x1 , x3 ) = u 3 (x1 ) The transversal displacement of the generic fiber coincides with the one described by the beam axis. In the kinematic model of the Eq. (3.1) it is clear that there is no influence of the deformations along.x2 on the overall structural model. Such hypotesis is reasonable if the width b of the beam is small enough in comparison to its length L,
Fig. 3.1 Schematic of a generic piezoelectric (monomorph) beam
Fig. 3.2 Schematic of the adopted kinematic model of the beam
48
3 Piezoelectric Vibration Energy Harvesters (PVEH)
and further details will be treated in the next section. By means of the compatibility Eq. (2.2), and by neglecting the axial strain (i.e. the variation of .u 1 with respect to . x 1 ) it is possible to derive the strain field: S (x1 , x3 ) = −x3
. 1
∂ 2 u 3 (x1 ) ∂ x12
(3.2)
As previously described, a lumped-parameter approach is adopted, and in particular the Rayleigh-Ritz method. According to previous works [8], only the transversal tip displacement .U of the beam is assumed as time-dependent Lagrangian coordinate and a cubic shape function .ψu for the first mode of vibration [9]. The transversal displacement of the beam can be then approximated as: u (x1 , t) = ψu (x1 )U (t)
(3.3)
. 3
where .ψu is the shape function satisfying the following boundary conditions: ψu (0) = 0,
.
ψu (L) = 1,
| ∂ψu || = 0, ∂ x1 |x1 =0
| ∂ 2 ψu || =0 ∂ x12 |x1 =L
(3.4)
The resulting shape function is: ψu (x1 ) =
.
3 ( x1 )2 1 ( x1 )3 − 2 L 2 L
(3.5)
The approximation of using only the first vibrational mode is justified by considering that these kind of systems are typically studied by forcing the clamp with an input harmonic monocromatic acceleration signal. In that case the dynamical response is mainly dominated by the first mode since lower modes have higher participating mass and so they are associated to higher amount of energy than the higher modes. Furthermore, it is implicitly assumed that the system is far away from internal resonances. Otherwise, a one dof model is not enough to study the problem, even with single harmonic excitation. In general, the approximation provided by the RayleighRitz method can be refined by adding Lagrangian coordinates (and well-suited shape functions) in the analytical description: u (x1 , t) =
N Σ
. 3
ψu,i (x1 )Ui (t)
(3.6)
i=1
where . N is the number of Lagrangian coordinates and shape functions. The global response is a linear combination of the response of each . N -th represented mode of the mechanical system.
3.2 Linear Theories
49
Fig. 3.3 Schematic of the piezoelectric layer with indication of the voltage values at the boundary
Electrical Behavior For modelling the electrical behavior, only the 31-mode is considered, referring to Fig. 3.3. When a piezoelectric layer stretches in the plane orthogonal to the polarization axis 3 an electric field . E 3 arises in the polarization direction. As a consequence, a voltage difference is generated between the electrodes that are generally put on the surfaces of the single active layer through the following relation: .
E3 =
∂φ ∂ x3
(3.7)
Since the layer is supposed very thin, the electric field can be assumed constant in the thickness with linear variation of the electric potential [3]. In general, like the elements of an electronic circuit, the layers of piezoelectric material, can be connected in series or parallel with conductive material. In case of single piezoelectric layer, or two layers connected in parallel, the electric potential in the thickness is the following: φ(x3∗ ) = x3∗
.
V tp
(3.8)
The voltage is zero at the surface in touch with the structural layer and equal to its maximum value in the thickness at the upper surface that represents the electrode, as indicated in Fig. 3.3. The parallel connection leads to the same potential difference between the piezoelectric layers that are polarized in the same direction. In case of two piezoelectric layers connected in series, the expression is the following: ∗ ∗ V .φ(x 3 ) = x 3 (3.9) 2t p where in the Eqs. (3.8) and (3.9), .x3∗ is the local coordinate of the piezoelectric layer and .t p its thickness. In the case of series connection, the total potential difference is shared between the layers, which are polarized in opposite directions by the manufacturer to avoid charge cancellation.
50
3 Piezoelectric Vibration Energy Harvesters (PVEH)
Electro-mechanical Equations of Motions The dynamics of the system is governed by the well-known Euler-Lagrange equations [10] in dissipative form [7]. The definition of Lagrangian function is: L = K − (E − W )
(3.10)
.
where .K , .E , and .W are respectively the kinetic energy, the internal energy of the structure and the external work made by external sources on the system. Then, the Euler-Lagrange equations are: .
d ∂L ∂L ∂D − + =0 ∂qi ∂ q˙i dt ∂ q˙i
∀qi
(3.11)
where .qi is a generic Lagrangian coordinate of the dynamical system. For the sake of simplicity the notation “.•˙ ” has been introduced, which means derivation in time of the quantitiy .•. If the system has N dofs, the Eq. (3.11) becomes a system of N differential equations. .D is the so-called dissipation or Lord Rayleigh function. In this specific case two coordinates represent the dynamics of the system: the tip displacement of the beam and the voltage value at the electrode. By developing the Eq. (3.11) it is possible to derive the equations of motion.
Computation of the Internal Energy The internal energy of the piezoelectric beam is defined as: 1 .E = 2
{ V
1 Ti j Si j dV + 2
{ V
Di E i dV
(3.12)
where .i, j = 1, 2, 3 and .V is the total volume of the medium. The first term is related to the mechanical contribution and the second one to the multiphysics behavior of the piezoelectric medium. The Eq. (3.12) can be then expressed in Voigt’s notation and by taking into account the 31-mode behavior it reads: E =
.
1 2
{ V
(T1 S1 + T2 S2 − D3 E 3 ) dV
(3.13)
It is then possible to insert the constitutive behavior of the material, in this case linear, by using the Eqs. (2.9) and (2.10). In the classical Euler-Bernoulli theory, the second term to the integrand of Eq. (3.13) is neglected. In this case, it is left for general information, since it will be considered in the following paragraph. By considering also a cantilever beam with constant width, the internal energy becomes:
3.2 Linear Theories
E =
.
1 2
{
L
b
51 N { Σ
0
k=1
(
x3,k x3,k−1
) k k k c11 S1 S1 − 2e31 E 3 S1 − ε33 E 3 E 3 d x3 d x1
(3.14)
where the formula is extended to . N layers of the stratification and the index .k identifies a generic layer of the stratification. By inserting the equations of the compatibility (3.2) and the electrical modelling (3.8) in case of one single layer or parallel connection, the internal energy is: 1 .E = 2
{
L
b 0
N { Σ k=1
x3,k
(
)
k 2 x3 c11
x3,k−1
∂ 2u3 ∂ x12
)2
k ek x 3 ∂ 2 u 3 ε33 − 2 31 V − V2 tp t p2 ∂ x12
) d x3 d x1
(3.15) By integrating over the thickness all the terms in the Eq. (3.15), it is possible to obtain the generalized quantities. The generalized stiffness is defined as: Cχχ =
N { Σ
x3,k
.
k=1
x3,k−1
k 2 c11 x3 d x3
(3.16)
k e31 x3 d x3 tp
(3.17)
The generalized coupling factor is: Cχ V =
N { Σ
x3,k
.
k=1
x3,k−1
About the electrical domain it is possible to define the generalized capacitance: CV V =
N { Σ
x3,k
.
k=1
x3,k−1
k ε33 d x3 t p2
(3.18)
At this point, the internal energy is: 1 .E = 2
{
L
( b Cχχ
0
)
∂ 2u3 ∂ x12
)2
∂ 2u3 − 2Cχ V V − CV V V 2 ∂ x12
) d x1
(3.19)
Computation of the Kinetic Energy The kinetic energy .K of the system, is the sum of the contribution of the tip mass Kt and the contribution of the beam .Kb :
.
K = Kt + Kb
.
(3.20)
52
3 Piezoelectric Vibration Energy Harvesters (PVEH)
The kinetic energy of the tip mass can be computed as:
.
[
) 2 )2 ) ) )) 2 ) ∂u 3 2 ∂ u3 ∂u 3 ∂ u3 + Jt + 2St ∂t ∂t∂ x1 ∂t ∂t∂ x1 ) )2 ]|| )| ) ∂y ∂u 3 ∂ 2 u 3 || ∂y | +m t mt + St + | | ∂t ∂t ∂t ∂t∂ x1 |x1 =L
1 Kt = 2
)
mt
(3.21)
x1 =L
where .m t , . Jt , . St , are respectively the tip mass, its second order moment with respect the neutral axis of the beam and the first order moment. The presence of the first order moment in the Eq. (3.21) is due to the asymmetry of the tip mass with respect to the longitudinal axis of the beam. The vertical motion of the support has been called . y. The kinetic energy of the layered beam is instead: 1 . Kb = 2
{
[)
L
b md 0
∂ 2u3 ∂t∂ x1
)2
∂ y ∂ 2u3 + + ∂t ∂t∂ x1
)
∂y ∂t
)2 ] d x1
(3.22)
In the Eq. (3.22) the mass density for unit length of the layered beam has been introduced .m d : N { x3,k Σ .m d = ρ k d x3 (3.23) k=1
x3,k−1
where .ρ k is the mass density of the .k-th layer. Since the beam is supposed very thin, its rotational inertia terms have been neglected.
Computation of the External Work External physical phenomena acting on the cantilever are represented by mechanical forces and the electrical charges at the electrodes which also depend by the connected external circuit. The external work is: { L { +b/2 .W = f t u 3 (L) + f d u 3 (x1 ) d x2 d x1 − q V (t) (3.24) 0
−b/2
where. f t is the force at the free boundary of the beam,. f d is the transversal distribuited load along the beam axis, and .q is the electrical charge at the electrode. Generally speaking, . f t , . f d can be forces of different kind, linear or nonlinear, space-dependent or not, influencing also the mathematical structure of the equations of motion. When the harvester is simply forced by a harmonic load at the clamp, both . f t and . f d are zero and there is only the presence of the support motion . y that induces an inertial effect with its second time-derivative (acceleration) equivalent to a load . f t due to relative dynamics.
3.2 Linear Theories
53
Computation of the Dissipation Function For developing the Euler-Lagrange equations, the energetic contribution of the dissipation is here introduced through a viscous dashpot. The damping force is thus assumed linearly dependent on the velocity and the associated dissipation function that appears in the Euler-Lagrange equations is the half of the damped power in the system: ) ) ∂u 3 2 1 cM (3.25) .D = 2 ∂t where .c M is the linear damping coefficient. Its determination can be done by performing experiments [3]. Here, the definition of the quality factor, . Q is used: .
1 2ζ M
Q=
(3.26)
where .ζ M is the so-called damping ratio. If . Q is known, it is possible to link .ζ M with c , by using notions of basic structural dynamics [7]:
. M
ζ
. M
=
cM 2 mωr
(3.27)
where .m is the mass of the considered 1 dof oscillator, and .ωr its natural circular frequency.
Equations of Motion By appling the Euler-Lagrange Eq. (3.11), and by assuming the previous quantities to compute the Lagrangian function, it is possible to obtain the equations of motion: { m U¨ (t) + c M U˙ (t) + kl U (t) − Θχ V V (t) = f ext − m y y¨ . C0 V (t) + Θχ V U (t) = q(t)
(3.28)
The coefficients that appear in the Eq. (3.28) are defined as: ( m = m t + Jt
.
)2 | | { L dψu || dψu || + 2S + bm d ψu2 d x1 t d x1 |x1 =L d x1 |x=L 0
m y = m t + St
.
| { L dψu || + bm d ψu d x1 dlx1 |x=L 0 {
f
. ext
= ft + 0
L
b f d ψu d x1
(3.29)
(3.30)
(3.31)
54
3 Piezoelectric Vibration Energy Harvesters (PVEH)
{ k =
)
L
bCχχ
. l
0
{ C0 =
d 2 ψu d x1
)2 d x1
L
bC V V d x1
.
(3.32)
(3.33)
0
{
L
Θχ V =
bCχ V
.
0
d 2 ψu d x1 d x1
(3.34)
In the Eqs. (3.29)–(3.33), .m is the sum of the modal mass of the beam and the tip mass. The translational acceleration of the clamp creates an inertial effect related to .m y . . f ext is the total amount of external forces on the structure. .kl is the linear stiffness of the system, .C0 is the equivalent capacitance of the piezoelectric layer, .Θχ V is the coupling coefficient due to the electromechanical behavior. The obtained system (3.28) describes the vibration of 2 dofs coupled oscillators: one representing the mechanical field and the other one the electrical counterpart, coupled between them through the piezoelectricity. To express the system (3.28) as a function of .U and .V only, it is then possible to introduce a constitutive law for modeling the charge .q. By supposing, for the sake of simplicity, a resistor circuit, the Ohm’s law leads to: .
V =RI
(3.35)
then, taking into account that the electrical current is the variation of the charge in time and by deriving once in time the second equation of the system (3.28), it can be obtain: { m U¨ (t) + c M U˙ (t) + kl U (t) − Θχ V V (t) = f ext − m y y¨ . (3.36) C0 V˙ (t) + Θχ V U˙ (t) − VR(t) = 0 A generalized formulation of the discretized approach can be easily obtained by assuming more than one dof for each physics. The equations of motions can be integrated in time-domain or frequency domain. The frequency domain solution makes sense in the framework of harmonic forcing function (e.g. harmonic imposed acceleration at the clamp). Such study has been performed in other works [8, 11]. The acceleration at the clamp is in general expressed with the Euler function: .
y¨ = Aeiωt
(3.37)
where . A is the amplitude of the signal. Since the system is linear, it is possible to search a particular integral of the equations of motion with the same frequency of the harmonic forcing function. The solution is put in the form: U (t) = U¯ eiωt
.
(3.38)
3.2 Linear Theories
55 .
V (t) = V¯ eiωt
(3.39)
By substituting the Eqs. (3.37)–(3.39) in the system 3.36 it follows: { .
−m U¯ ω2 eiωt + c M iωU¯ eiωt + kl U¯ eiωt − Θχ V V¯ eiωt = Feiωt ¯ iωt C0 V¯ iωeiωt + Θχ V iωU¯ eiωt − V e = 0
(3.40)
R
By normalizing the first Equation of (3.40) with respect to .m, the second one with respect to .C0 , and with some algrebraic manipulations it is possible to obtain the frequency response functions (FRFs) of the system for the voltage .V¯ , the tip ¯ displacement .U¯ and the power . P:
.
V¯ =
Θχ V
kl P¯ =
M
E
κχ2 V Ω E Ω M 2 ΩM +Ω E
F
¯ = .U
.
) ( 2 −F κχ2 V Ω M + iκχ2 V Ω M Ω E ) ( ( 2 ) [( κ2 Ω2 2 Ω M + Ω E2 1 − ΩM + Ωχ2V+ΩM2 + i 2ζ M Ω M +
)] [( ) ( 2 ΩM ΩE 2 1 − ΩM + i 2ζ M Ω M + κχ2 V ΩΩ2M+Ω + κχ2 V Ω 2 +Ω 2 2 E
E
M
2 F 2 ωr κχ2 V Ω E Ω M [( ) ( 2 ( ) κ2 Ω2 2 2 1 − ΩM kl Ω E2 + Ω M + Ωχ2V+ΩM2 + 2ζ M Ω M + E
M
)] (3.41) (3.42)
M
κχ2 V Ω M Ω E 2 Ω E2 +Ω M
)2 ] (3.43)
The Eq. (3.43) has been computed simply applying the Joule’s law for a resistive circuit (. P = V 2 /R). In the previous Eqs. (3.41)–(3.43) some parameters have been introduced. In particular: . F = −m y A (3.44) is the amplitude of the forcing function. The dimensionless space of mechanical and voltage frequency is introduced: ω .Ω M = (3.45) ωr ΩE =
.
ω RC ωr
(3.46)
where .ωr is the circular frequency of the mechanical system: ωr =
.
/ kl /m
(3.47)
then .ω RC is the so-called cut-off frequency of the circuit: ω RC =
.
1 RC0
(3.48)
56
3 Piezoelectric Vibration Energy Harvesters (PVEH)
finally .κχ V is the global coupling coefficient. κ
. χV
Θχ V =√ kl C 0
(3.49)
By imposing the stationarity of the power with respect to the cut-off dimensionless frequency .Ω E it is possible to find an optimal condition. The stationarity is: .
∂ P¯ (Ω M , Ω E ) =0 ∂Ω E
(3.50)
which admits the following solution:
opt
ΩE
.
[ ) |( | 1 − Ω 2 + κ 2 2 + 4ζ 2 Ω 2 | M χV M M = ΩM | ( ) 2 2 2 1 − ΩM + 4ζ M2 Ω M
(3.51)
and the optimal value of resistive load is obtained combining the Eq. (3.48) with (3.46): 1 opt .R = (3.52) Ω E C0 Ωr It can be demonstrated, omitted here for space reasons, that the power admits two equal peaks [12], at the resonant frequency of the beam or at the so-called antiresonance circular frequency, or natural circular frequency at open circuit, defined as: / oc 1 + κχ2 V (3.53) .ωar = ωr = ωr which represents the natural frequency of the system if the coupling is exploited by means of circuit presence.
3.2.2 Modified Euler-Bernoulli Beam Theory As mentioned in the previous section, Euler-Bernoulli beam theory is well-suited for the analysis of piezoelectric beams if the length is large enough in comparison with the width b. If their ratio (L./b) decreases, the kinematic model fails because three dimensional effects arise due to the lateral confinement, in the direction of the width. In this case a plate model is better to be used, that is a bi-dimensional structural element. To take into account the presence of the tridimensional effects but using a uniaxial structural model (i.e. beam) without regarding the magnitude of the ratio L./b Gafforelli et al. [13, 14] developed the so called modified transverse deformation theory (MTD), that can be seen a refinement of the classical kinematic
3.2 Linear Theories
57
model of Euler-Bernoulli. The starting point is to consider the aforementioned ratio among the in-plane dimensions of the beam: Λ = L/b
.
(3.54)
If the ratio is very low, the beam is very wide, the lateral confinement is very high and it is reasonable to assume that the lateral strains are zero (. S2 = 0). Such case is known as null transverse deformation problem (NTD). On the opposite, if the ratio expressed by the Eq. (3.54) is very high, the beam is very narrow, and it follows by equilibrium that the lateral stresses must be zero (.T2 = 0). This condition is known as null transverse stress problem (NTS). To recover the described extreme conditions (NTD and NTS), a shape function . f Λ (x2 , Λ) is introduced in the expression of the . S2 strain as a correction of the NTS case: ) ) ]} { [ 1 − ν2 ν e32 − f Λ (x2 , Λ) e33 E 3 S = −ν S1 + c11 1−ν
. 2
(3.55)
The shape function must be equal to 1 if .Λ → ∞ or .x2 = ±b/2 whereas .0 if Λ → 0. If one consider three dimensional finite element simulations of piezoelectric laminates [11], it can be noticed that the three-dimensional effects are concentrated in the zone of the clamp, around the longitudinal axis of the beam. However, with excellent approximation for the purposes of this work (frequency, voltage, power) the shape function can be adopted constant along .x2 and equal to:
.
f (Λ) =
. Λ
ΛaΛ ΛaΛ + bΛ
(3.56)
where .aΛ and .bΛ are calibration parameters equal to: . Λ
a = 0.8
(3.57)
b = 2.2
(3.58)
. Λ
By using the general condition that in the case of cantilever beam .T3 = 0 and with few algebraic manipulation of the linear piezoelectric constitutive behavior, it is possible to obtain the stresses .T1 , .T2 , and the electric displacement . D3 : ( ) ) ) c11 1 − ν 2 f Λ ν (1 − ν f Λ ) e33 E 3 . T1 = S1 − e31 − ν f Λ e32 − 1 − ν2 1−ν
(3.59)
)
) ) ) c11 ν ν e33 E 3 . T2 = (1 − f Λ ) S1 − e32 − 1−ν 1 − ν2
(3.60)
58
3 Piezoelectric Vibration Energy Harvesters (PVEH)
) ) ν (1 − ν f Λ ) e33 S1 + D3 = e31 − ν f Λ e32 − 1−ν ( ) )2 (3.61) . 2 ) 1−ν ν (1 + ν) (1 − 2ν) 2 S e32 − e33 e33 + ε33 E 3 + fΛ + c11 1−ν c11 (1 − ν) For analytical details see [8, 11, 13, 14]. At this point, the modelled quantities of stress, strain and electric displacement can be used in the computation of the internal energy through the Eq. (3.12). Then, the general procedure for the determination of the equations of motion is the same of the previous paragraph. In this work, MTD, NTS and NTD conditions have been implemented in a MATLAB code.
3.3 Nonlinear Nonconservative Electroelastic Model As described in Chap. 2, there are many sources of nonlinearity in physics. One of them is certainly the inherent characteristic of the material. Also inherent nonlinearities can be of different types. In this context, two sources of nonlinearity are important to fit the real behavior: nonlinear piezoelectric constitutive relation and nonlinear damping. Nonlinear damping, often neglected, it is important in this problem to consider ferroelastic hysteresis [15, 16]. As will be presented in details in Chap. 7, it has been observed during experiments that, over certain (generally and practically speaking very low) magnitude of stresses the dynamical response of a cantilever energy harvester is nonlinear. In this context, the model by Leadenham and Erturk [15] is particularly well suited for the dynamical analysis of piezoelectric cantilever. However, it is necessary to carry out experimental test on structural elements to find out the nonlinear coefficients. The basic fundamentals on thermodynamic side have been discussed in Chap. 2, in the framework of nonlinear piezoelectricity. Here the model for a piezoelectric cantilever is presented.
Cantilever Bimorph Model The modelling refers to a beam like the one depicted in Fig. 3.1 but specifically assuming a symmetrical layering with a central structural layer and the two outer ones made of piezoelectric material. From the kinematic point of view the modelling of Euler-Bernoulli is adopted, through the Eq. (3.2). It is recalled that .u 3 is the displacement of the beam in the orthogonal direction to its axis .x1 (Fig. 3.1). Then, the adopted modelling for the electric field is the same of the previous models, represented with the Eqs. (3.8), or (3.9), depending if the layers are in parallel or series, respectively. Assumed the modelling for each physics, it is possible to compute stresses .T1 and electric displacement . D3 by using Eqs. (2.9) and (2.10) and the enthalpy density function defined in the Eq. (2.28). By following the same analytical procedure explained in Sect. 3.2.1 it is possible to compute the kinetic energy .K
3.3 Nonlinear Nonconservative Electroelastic Model
59
and the internal energy .E . It is important to mention that in this model the central structural layer is assumed linear in terms of constitutive law. In other words, its enthalpy . Hs is assumed as: 1 s 2 s c S .H = (3.62) 2 11 1 where the apex s means “structural”.
Kinetic Energy The kinetic energy of the bimorph is computed in the same way of the Sect. 3.2.1, its expression is the same and the nonlinearity is not present according to this model.
Internal Energy The internal energy of the structure is computed as in the previous models by integrating the enthalpy density in the volume. The assumed enthalpy density is defined by the Eq. (2.28), which assumes quadratic stiffness nonlinearity. This choice is oriented toward obtaining a linear backbone curve that perfectly matches the experimental response, as shown in the past [15]. At this point, the first difference with respect to the other models appears. In fact, the enthalpy leads to a nonlinear electromechanical system of equations. By developing the integrals: { E =
.
Vs
{ H s dV +
H p dV
(3.63)
Vp
where .Vs and .V p are the volume of the structural layer and of the piezoelectric material, it is possible to obtain:
E = .
{
)
)2 ) )3 ) 2 ) [ ∂ 2u3 ∂ 2u3 1 ˆ ∂ 2u3 ∂ u3 − 2θˆ1 2 + + sgn k 2 2 2 2 3 ∂ x1 ∂ x1 ∂ x1 ∂ x1 0 ) 2 )2 ) 2 )] } ∂ u3 ∂ u3 1 +θˆ2 sgn V d x1 − C V 2 2 2 2 ∂ x1 ∂ x1
{
L
kˆ1
(3.64)
where the coefficients in the Eq. (3.64) are defined below. .mˆ is the distributed mass: ( ) mˆ = b ρs h s + 2ρ p h p
.
(3.65)
where .ρs , .ρ p are the mass densities and .h s , .h p the thicknesses of the structural and the piezoelectric layers. .kˆ1 is the distributed linear stiffness:
60
3 Piezoelectric Vibration Energy Harvesters (PVEH)
( ) 1 1 c11,s bh s + c11, p bh p 4h 2p + 6h p h s + 3h 2s kˆ = 12 6
. 1
(3.66)
and .kˆ2 is the distributed nonlinear stiffness: ( ) 1 kˆ = c111, p bh p 2h 3p + 4h 2p h s + 3h p h 2s + h 3s 2
. 2
(3.67)
It is clear in the Eq. (3.67) that the nonlinear contribution is only provided by the piezoelectric material through the coefficient .c111, p . In case of series connection of electrodes of the layers, the distribuited linear and nonlinear electromechanical coefficients .θˆ1 and .θˆ2 are respectively: ( ) 1 e31 b h p + h s 2
(3.68)
) ( 1 e311 b 4h 2p + 6h p h s + 3h 2s 12
(3.69)
bL ∗ ε33 2h p
(3.70)
θˆ =
. 1
θˆ =
. 2
The capacitance is then: C=
.
where . L ∗ is the effective length and it coincides with the total length of the beam that is affected by transduction. The overhanging cantilever length . L is lower than ∗ . L because a small portion of the length must be inserted among suitable plates to realize the clamp.
Nonconservative External Work The assumed nonconservative virtual work is equal to [15]: {
L
δWnc = −
.
0
[
] V bˆ1 u 3 sgn(u 3 ) + bˆ2 u 23 sgn(u˙ 3 )δu 3 d x1 − δλ R
(3.71)
in which .bˆ1 and .bˆ2 are distribuited damping coefficients. At this point a spatial discretization is assumed but in this case, the first eigen-mode of the continuous Euler-Bernoulli problem is assumed in the discretization (3.3), that is: ) ) ) [ ) ) ) )]} { ) βx1 βx1 βx1 βx1 1 − cos − σ sinh − sin cosh .φ(x 1 ) = L L L L 2 (3.72) with .β = 1.87510407 and .σ = 0.7341.
3.3 Nonlinear Nonconservative Electroelastic Model
61
Equations of Motion Then, by applying the Hamilton’s principle or the Euler-Lagrange equations, the electromechanical equations of motion are represented by the following system of ordinary differential equations (ODEs): ⎧ ( ) ¨ + b1 U sgn(U ) + b2 U 2 sgn(U˙ ) + k1 U + k2 U 2 sgn(U )+ ⎪ ⎨m U ] [ . − θ1 + θ2 U sgn(U ) V = f ext ⎪ [ ] ⎩ ˙ C V + VR + θ1 + θ2 U sgn(U ) U˙ = 0
(3.73)
where . f ext represents the sum of all external forces acting in correspondence of the mechanical dof, as in the previous models. .m is participating mass of the first mode, .b1 , .k 1 .θ1 are the linear damping, stiffness, coupling coefficients respectively. While .b2 , .k 2 , .θ2 are the nonlinear ones. .C is the capacitance coefficient of the piezoelectric cantilever. All the coefficients are extensively reported here below: {
L
m = mˆ
φ 2 d x1
(3.74)
φ 2 d x1
(3.75)
φ 3 sgn (φ) d x1
(3.76)
∂ 4φ φ d x1 ∂ x14
(3.77)
.
0
{
ˆ1 .b1 = b
L
0
b = bˆ2
{
L
. 2
0
k = kˆ1
{
L
. 1
0
k = kˆ2
{
L
. 2
0
[
∂ 2φ ∂ 4φ + ∂ x12 ∂ x14
)
θ = θˆ1
. 1
θ = θˆ2
{
. 2
0
L
∂ 3φ ∂ x13
)2 ]
) φ sgn
∂ 2φ ∂ x12
| ∂φ || ∂ x1 |x1 =L
) 2 ) ∂ 4φ ∂ φ d x1 φ sgn 4 ∂ x1 ∂ x12
) d x1
(3.78)
(3.79)
(3.80)
The presence of the .sgn function in the equations of motion is inherited from its presence in the enthalpy of the Eq. (2.28). The meaning is to express the deformation in terms of strain magnitude instead of strain itself. Such reason is due to the fact that when a classical model, i.e. defined in the strain and not in its magnitude, is applied to a symmetrical structure in the stratification, the terms proportional to the nonlinear second-order coefficients disappear, making the presence of third-order
62
3 Piezoelectric Vibration Energy Harvesters (PVEH)
terms necessary to predict the nonlinearity. By inserting the sign function, this does not happen [15]. This model with quadratic nonlinear softening dominated by .k2 , will provide a linear backbone curve when the system is studied in the frequency domain. More in detail, as described in [15], a quadratic stiffness system predicts a backbone curve that varies linearly with the response amplitude. Instead, a cubic stiffness model predicts a quadratic variation of the peak response frequency with response amplitude.
References 1. Sodano HA, Park G, Leo DJ, Inman DJ (2003) Model of piezoelectric power harvesting beam. In: Proceedings of IMECE, Washington DC, November 15–21, 2003 2. Erturk A, Inman DJ (2008) Issues in mathematical modeling of piezoelectric energy harvesters. Smart Mater Struct 17:065016 (14pp) 3. Erturk A, Inman DJ (2011) Piezoelectric energy harvesting. Wiley 4. Zhou S, Hobeck JD, Cao J, Inman DJ (2017) Analytical and experimental investigation of flexible longitudinal zigzag structures for enhanced multi-directional energy harvesting. Smart Mater Struct 26:035008 (17pp) 5. Hagood NW, Chung WH, Von Flotow A (1990) Modelling of piezoelectric actuator dynamics for active structural control. J Intell Mater Syst Struct 1(327) 6. Agnes GS, Inman DJ (1996) Nonlinear piezoelectric vibration absorbers. Smart Mater Struct 5:704–714 7. Meirovitch (1986) Elements of vibration analysis. McGraw Hill, NY 8. Gafforelli G (2015) Piezoelectric vibration micro energy harvester. PhD thesis, Politecnico di Milano, Milano 9. Strutt Baron Rayleigh, JW (1877) The theory of sound. Macmillan, London 10. Lanczos C (1970) The variational principles of mechanics. Dover Publications Inc, New York 11. Rosso M (2019) Piezoelectric microstructures for industrial vibration energy harvesting applications. Master’s thesis, Department of Civil Engineering, Politecnico di Milano, Milano, Italy 12. duToit NE, Wardle BL, Kim SG (2005) Design considerations for mems-scale piezoelectric mechanical vibration energy harvesters. Integr Ferroelectr 71:121–160 13. Ardito R, Corigliano A, Gafforelli G, Valzasina C, Procopio F, Zafalon R (2016) Advanced model for fast assessment of piezoelectric micro energy harvesters. Front Mater 3(17) 14. Gafforelli G, Ardito R, Corigliano A (2015) Improved one-dimensional model of piezoelectric laminates for energy harvesters including three dimensional effects. Compos Struct 127 15. Leadenham S, Erturk A (2015) Unified nonlinear electroelastic dynamics for a bimorph piezoelectric cantilever for energy harvesting, sensing, and actuation. Nonlinear Dyn 79:1727–1743 16. Goldschmidtboeing F, Eichhorn C, Wischke M, Kroener M, Woias P (2011) The influence of ferroelastic hysteresis on mechanically excited PZT cantilever beams. In: Proceedings of the 11th international workshop on micro and nanotechnology for power generation and energy conversion applications, pp 114–117
Chapter 4
The Magnetic Force
This chapter presents, first, a theoretical, computational and experimental study about the magnetic force exchanged between permanent magnets. The most suitable approach for fast but accurate simulation of the force is identified. The ultimate goal of the force evaluation is to use such kind of load as dynamical effect to simulate the magnetic frequency up-conversion mechanism in the design of piezoelectric energy harvesters through lumped parameters models.
4.1 Introduction A key point for the simulation of magnetic frequency up-conversion in piezoelectric vibration energy harvesting is certainly the modelling of the magnetic force. The reliability of a lumped parameter model depends also by the correct modelling of the interaction forces (e.g., magnetic in this case). Many works, illustrated in the state-of-the-art chapter do not present a specific study about that, and often a simple single dipole model is adopted even if the relative distance between PMs is not so high in comparison with the dimensions of the magnet. Then, also the experimental validation of the system often is proposed directly at the harvester level. With this motivation and to have a realiable but fast strategy of simulation, in the following different approaches for the modelling and simulation of the magnetic force are studied and compared, also with experimental results.
4.2 Modeling The theoretical evaluation of the force is a complex task due to the fact that it depends nonlinearly from many variables, (e.g., shape of the magnets, entity of magnetization © The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5_4
63
64
4 The Magnetic Force
vector, spatial orientation of the magnets). Due to this complexity, the interaction is typically modelled by means of numerical techniques (e.g., Finite Element Analyses (FEA)) through commercial computer codes. However, from a computational point of view, an accurate solution requires 3D simulations with many degrees of freedom and, consequently, high computing time. For this reason, it is useful to have an analytical fast prediction of the magnetic force. The investigation has been carried out on commercial cubic Neodymium-Iron-Boron alloy (NdFeB) PMs [1], with a side length of 3 mm. The module of the magnetization vector is equal to 1.32 T.
4.2.1 Analytical Formulas Akoun and Yonnet presented in [2] an analytical approach for the calculation of the magnetic force exerted between two cuboidal magnets with uniform, rigid and parallel magnetization vectors. Their approach is pratically an integral version of the multi-dipole technique. This theory was expanded by Yonnet and Allag in [3] by taking into account the torque between magnets and the interaction in case of orthogonal magnetization vectors. By combining [2, 3], it is possible to compute every force component for a general orientation of magnetization vectors. Rakotoarison et al. in [4] found semi-analytical expressions for the scalar potential and magnetic field produced by a radially polarized permanent magnet through the Coulombian approach. Rubeck et al. in [5] presented an analytical method for the calculation of magnetic field created by a polyhedron-shaped permanent magnet. Another approach was presented by Santra et al. in [6], with reference to the passive magnetic force in a radial magnetic bearing. Given the analogy between the magnetic and the electrostatic problems, Pillatsch et al. in [7] introduced an additional simplification and assumed an inverse square relationship between the magnetic force and the relative distance between the magnets. Similarly, Schomburg et al. in [8] assumed a sort of inverse square relationship but with two fitting parameters instead of the single parameter of the classical inverse square. In this work, we compute first the magnetic force by following the Yonnet approach [2]. The formulation is based on the computation of the interaction energy between two cuboidal magnets, with parallel magnetization vectors, then the force is derived through the gradient operator. The generic component of the force in 3D space is obtained in the following: Fi = .
J · J, 4π μ0
1 Σ m,n, p,q,r,s=0
(−1)m+n+ p+q+r +s
(4.1)
φi (Umn , V pq , Wr s , R) where J and J’ are the magnetization vectors expressed in Tesla, .μ0 is the magnetic permeability of vacuum equal to .4π · 10−7 H/m. The parameters .m, .n, . p, .q, .r , .s are related to the corners of the two magnets. They can be equal to 0 or 1. The combinations of .m, . p, .r identifies the corner of one magnet and .q, .r , .s of the other.
4.2 Modeling
65
The coefficients .φi that appear in (4.1) are [2]: φx (Umn , V pq , Wr s , R) = 2 V pq − Wr2s
ln(R − Umn ) + Umn V pq ln(R − V pq )+ ) ( Umn · V pq 1 + Umn R V pq Wr s arctan Wr s R 2
.
2
(4.2)
φ y (Umn , V pq , Wr s , R) = 2 Umn − Wr2s ln(R − V pq ) + Umn V pq ln(R − Umn )+ . 2 ) ( Umn V pq 1 + V pq R Umn Wr s arctan Wr s R 2
(4.3)
φz (Umn , V pq , Wr s , R) = .
− Umn Wr s ln(R − Umn ) − V pq Wr s ln(R − V pq )+ ) ( Umn V pq − Wr s R Umn V pq arctan Wr s R
(4.4)
By considering the Fig. 4.1, two Cartesian reference systems are located in the centroids of the two magnets; the nomination of the axes here is not the same of the previous chapter, just to be adherent to the work by Yonnet. .α, .β and .γ are the vector components of the distance between the centers O and O’ of the reference systems, and .a, .b, .c, . A, . B, .C are the half-lengths of the magnets sides. The coefficients .Umn , . V pq , . Wr s , . R are defined as: Umn = α + A(−1)m − a(−1)n
(4.5)
V pq = β + B(−1)q − b(−1) p
(4.6)
Wr s = γ + C(−1)s − c(−1)r
(4.7)
.
.
.
.
R=
/ 2 + V2 + W2 Umn pq rs
(4.8)
As an alternative, one can assume an inverse square approximation for the magnetic force between two magnets. With reference to Fig. 4.2 one can write: .
Fmag =
F0 h 2 2 rmag
(4.9)
In Eq. (4.9), . Fmag is the magnetic force module, . F0 is the peak of magnetic force reached when the distance between the magnets is minimum (.h); .rmag is their
66
4 The Magnetic Force
Fig. 4.1 Schematic of the interacting magnets in the formulation proposed by Yonnet
Fig. 4.2 Illustration of the interaction layout between two permanent magnets
relative distance. In view of the specific examples considered in this paper, the inplane behavior is of interest. By simple trigonometric manipulations it is possible to obtain the . Fz and . Fy force components of . Fmag : .
.
Fz = F0 h 2 (
z2 − z1 h2
Fy = F0 h 3 (
+ (z 2 − z 1 )2 1
h2
+ (z 2 − z 1 )2
)3/2
(4.10)
)3/2
(4.11)
It is important at this stage to highlight that, if one want to use inverse square approach, the peak force must be known. In the Yonnet approach case, the only
4.2 Modeling
67
parameter is the magnetization . J of the magnets, that is a physical property and is independent from the relative distance between magnets. Conversely, the inverse square approach needs a fitting procedure with reference to the peak force. Both approaches are insensitive to an inversion in sign of the interaction nature. In other words, the attractive interaction between magnets is simply the repulsive one changed in sign, this is not in agreement with the real phenomenon as will be presented in the experimental section of this chapter. According with the approach by Schomburg [8], the . y-component can be computed with the following expression (under the assumption that . A ≥ a): ⎧ d2 ⎪ F0 (h+de e )2 if |z 2 − z 1 | ≤ A − a ⎪ ⎨ ] F0 de2 [ A+a −z 1 . Fy = (4.12) if A − a ≤ |z 2 − z 1 | ≤ A + a − z22a 2 (h+d ) 2a ⎪ e ⎪ ⎩ 0 if |z 2 − z 1 | ≥ A + a where . F0 is the force that is exerted with magnets put in contact and .de is the gap distance at which the maximun force with aligned magnets (.z 2 − z 1 = 0) reduces to .1/4 of . F0 . Both . F0 and .de are unknown, so a best-fit procedure should be implemented. The .z-component is calculated as: [ .
Fz = Fz,m
a4 a4 − a 4 + (z 2 − z 1 − A)4 a 4 + (z 2 − z 1 + A)4
] (4.13)
where . A and .a are the half-lengths of the two magnets facing to the direct interaction expressed in accordance to the Fig. 4.1; . Fz,m contains the parameters . F0 and .de and depends on the gap .h. This approach can be used after the experimental characterization. Another analytical approach based on the experimental observation is to use a fitting formula. One of them is the Gaussian model: .
Fi =
n Σ
ak e
)2 ( z−b − c k k
(4.14)
k=1
where the index .i is the spatial direction . y or .z and .ak , .bk , .ck are fitting parameters. The variable .z at exponent is the relative distance between magnets on the .z-axis with reference to the Fig. 4.2. In all cases, three terms in the summation of Eq. (4.14) provide a good estimate of the curve (nine coefficients with 95 % confidence bounds).
4.2.2 Finite Element-Based Numerical Solution To have a numerical solution, Finite Element Method (FEM) has been adopted by using the commercial software COMSOL Multiphysics [9]. The Eq. (2.41) is solved
68
4 The Magnetic Force
Fig. 4.3 From left to right: illustration of the finite element mesh and example of contour plot (adapted from [10]) of the simulated magnetic field for a fixed relative position between magnets
on the discretized spatial domain to find the magnetic potential .ϕm , and then the magnetic force as previously described in Chap. 2. Serendipity quadratic elements have been adopted. Generally speaking, a numerical issue is represented by the force calculation, which is performed through a boundary integral on the magnets and to get reliable results, a very refined mesh is necessary along and near such surfaces. On the other hand, sufficiently far from the permanent magnets, the magnetic field is very low and there is no need of high level of accuracy. The mesh of the discretized model has been chosen at three different levels of coarseness: very refined in the magnets, medium in the intermediate air zone and coarse along the external user defined air, as illustrated on the left part of the Fig. 4.3. Convergence analyses were carried out for a number of finite elements in the range 1.5E+6-7.0E+6, not reported here for the sake of brevity. Excellent results can be obtained with 6.0E+6 finite elements in the model. The computing time for solving a magnetostatic problem (i.e., magnetic interaction for a fixed relative distance) is 3–4 min which drops to 2 min in case of using 1.5E+6 finite elements and a computer with 8 GB RAM. Obviously, the simulation of a sweep over a certain interval of relative position requires a computing time proportional to the number of the sampling of the sweep. It can mean hours of computing time. An example of the post processing result is shown on the right side of the Fig. 4.3.
4.2.3 Setup for the Experimental Study A specifically design setup has been realized to test the magnetic force. The experimental set up is shown in Fig. 4.4, it is composed of an electrical integrated servopositioner (SMART Automation, SM2316D, max 48vdc rated velocity 66 rpm), an handcrafted actuator, a load cell S2 Tech 514QD (full scale FS 30 N, repeatability error: .≤ ±0.033 % FS, total error: .≤ ±0.023 % FS, sensitivity: 2 mV/V/FS ) and a displacement sensor. The data acquisition device (DAQ) is a DAQCard.TM -6062E by National Instruments (12 bit resolution, maximum sampling rate of 500 kHz). To set the gap distance between magnets, a simple mechanical gauge has been used. In the experiment, one magnet has been connected to the motion axis of the actuator
4.2 Modeling
69
Fig. 4.4 From left to right: illustration of the experimental setup and zoomed view on the supports of the magnets
and the other one to the load cell. The last one plays the role of “fixed at ground” magnet as indicated in Fig. 4.2. However, the magnets are not directly fixed to the cell and to the axis but they have been glued with cyanoacrylate on two Aluminium rods machined with a numerical control lathe. This last operation has been done in order to prevent the interaction of the magnetic field with the supporting system. The velocity of the motion axis of the actuator has been fixed to 0.5 mm./s.
4.2.4 Comparison of Different Approaches To compare analytical, numerical and experimental approaches, three values of gap distance have been considered, 0.5 mm, 1.0 mm, and 2.0 mm. In the experimental case, two configurations have been tested: attractive and repulsive. However, only the comparison for the attractive case is here reported for the sake of brevity, without losing conceptual validity for the repulsive one. In Figs. 4.5, 4.6 and 4.7 are reported the comparisons for the aforementioned approaches. The approach by Schomburg is only reported for the case of gap distance between the magnets equal to 2.0 mm because it does not fit reasonably the “shape” of the curve, especially for the ycomponent. From the above results, it appears that the peak force of interest can be represented with each of theoretical presented approach. However, a good matching in terms of peak force is not a sufficient condition for a good representation of reality. In fact, the shape of the force-displacement law is directly representative of the involved interaction energy. The inverse square approximation is good to capture the physical evidence, as reported in Fig. 4.5, but fails in the representation of the whole force-displacement curve, that is strictly connected to the global magnetic energy. In terms of shape of the force-displacement curve, Yonnet approach and finite element analysis are in good agreement with the experiment. However, the computations with the Yonnet approach (as well as the other analytical formulations) are carried
70
4 The Magnetic Force
out instantaneously by a computer. Conversely, the presented finite element models required more or less 2 h 10 min of computing time. This is due to the high number of degrees of freedom typical of such a technique. For more refined energetic representation of the phenomenon the Yonnet approach appears to be the best choice if properly set. Such a conclusion is corroborated by the evaluation of the overall error on the force-distance curve. A dimensionless . L 2 norm of the discrepancy is applied, as follows: { +20mm 2 −20mm (Fi − Fex p ) dz .error = (4.15) { +20mm 2 −20mm (Fex p ) dz where . Fi is referred to the various simulations. Table 4.1 summarizes the errors for each case of interaction and gaps. In general, the Yonnet approach provides good results: the overall error is by far less than the case of inverse square and it is well aligned with FEA. The inverse square approximation is reasonable for large gaps only: as a matter of fact, the error is decreased when the gap between the magnets is
Fig. 4.5 From left to right: . Fy and . Fz for .h=0.5 mm, adapted from [11]
Fig. 4.6 From left to right: . Fy and . Fz for .h=1.0 mm, adapted from [11]
4.2 Modeling
71
Fig. 4.7 From left to right: . Fy and . Fz for .h=2.0 mm, adapted from [11] Table 4.1 Dimensionless . L 2 discrepancy with respect to the experimental results Gap .h [mm] Error . Fy (%) Error . Fz (%) Approach 0.5 1.0 2.0 0.5 1.0 2.0 0.5 1.0 2.0 0.5 1.0 2.0
5.81 5.39 5.33 56.6 32.4 10.6 5.29 5.62 4.52 0.08 0.07 0.08
9.64 8.62 8.91 74.7 47.9 19.0 11.3 8.92 8.19 0.07 0.07 0.08
Yonnet
Inverse square
FEA
Gaussian fit
increased. The Gaussian fit provides excellent approximation with three terms only, but it cannot be used as a predictive tool since it is just a fit of experimental data. An interesting phenomenon is observed by comparing the attractive and the repulsive configuration for the same value of gap distance. They show slightly different values of force in absolute value. This is confirmed also in the experience of R&D department of the supplier. More in detail, it can be noticed in the left part of the Fig. 4.8 that for the . Fy component represented for the case of gap equal to 0.5 mm, the attractive values are greater than the repulsive ones. The opposite holds for the . Fz component when the gap .h is very small (right side of Fig. 4.8). The difference is due to micro-structure reasons: when the magnets are in repulsive scheme, each magnet disturbs the parallel orientation of the dipole in the other magnet. This means that the force is lower in . y direction but higher in .z because the missed parallelization increases the.z-component. In any case, when the magnets are sufficiently distant, the repulsive curves tend in absolute value to the attractive ones. For all analyzed cases
72
4 The Magnetic Force
Fig. 4.8 From left to right: experimental . Fy and . Fz comparison for attractive and repulsive configurations, adapted from [11]
Fig. 4.9 From left to right: experimental. Fy and. Fz peaks for different gap distances, adapted from [11]
the effect is less than 10% at peaks. The Fig. 4.9, related to attractive configuration, highlight the nonlinear nature of the peak forces for varying gap distance .h. On the left side of Fig. 4.9, related to the y-component, the inverse square coincides with the experimental one for initial assumptions of its calibration.
References 1. urlhttps://www.supermagnete.it 2. Akoun G, Yonnet JP (1984) 3D analytical calculation of the forces exerted between two cuboidal magnets. IEEE Trans Magn 20(5):1962–1964 3. Yonnet JP, Hallag H (2011) Three-dimensional analytical calculation of the permanent magnet interactions by “magnetic nodes” representation. IEEE Trans Magn 47(8):2050–2055 4. Rakotoarison HL, Yonnet JP, Delichant B (2007) Using coulombian approach for modeling scalar potential and magnetic field of a permanent magnet with radial polarization. IEEE Trans Magn 43(4):1261–1264
References
73
5. Rubeck C, Yonnet JP, Allag H, Delichant B, Chadebec O (2013) Analytical calculation of magnet systems: magnetic field created by charged triangles and polyhedra. IEEE Trans Magn 49(1):144–147 6. Santra T, Roy D, Choudhury AB (2017) Calculation of passive magnetic force in a radial magnetic bearing using general division approach. Progr Electromagn Res M 54:191–102 7. Pillatsch P, Yeatman EM, Holmes AS (2014) Magnetic plucking of piezoelectric beams for frequency up-converting energy harvesters. Smart Mater Struct 23:025009–12 8. Schomburg WK, Reinertz O, Sackmann J, Schmitz K (2020) Equations for the approximate calculation of forces between cuboid magnets. J Magn Magn Mater 506:166694 9. AC/DC Module User’s Guide. https://doc.comsol.com/5.4.pdf 10. Rosso M, Corigliano A, Ardito R (2021) An investigation on the magnetic interaction for frequency up-converting piezoelectric vibration energy harvesters. In: Proceedings of 2021 IEEE 20th International conference on micro and nanotechnology for power generation and energy conversion applications (powerMEMS), Exeter, United Kingdom, pp 232–235 11. Rosso M, Corigliano A, Ardito R (2022) Numerical and experimental evaluation of the magnetic interaction for frequency up-conversion in piezoelectric vibration energy harvesters. Meccanica 57:1139–1154
Chapter 5
PVEH and Magnetic Interaction
This chapter presents some computational studies for the exploitation of magnetic force as a frequency up-conversion mechanism in vibration-based piezoelectric energy harvesting. First, a device concept is presented in which the FuC occurs through the interaction of a low-frequency oscillating mass and a piezoelectric transducer. Next, a magnetic interaction mechanism based on the free fall of the seismic mass, no longer oscillating but simply moving in a stroke, is investigated. The electromagnetic transduction for the latter mechanism is also briefly investigated.
5.1 Coupled-Oscillators Based Mechanism In this section, an energy harvesting system consisting of a low-frequency oscillating mass and a piezoelectric transducer, both equipped with a magnetic layer, is investigated at the computational level. The conceptual idea of the study has been patented in the past years [1] and a schematic is depicted in Fig. 5.1. In this context, the scheme is implemented using some typical data of a mesoscale object to observe the dynamical response of the system through computational time domain analysis. The idea of the concept is to use a central mass connected to elastic springs that can have strong dynamic amplification at low frequencies (less than 10 Hz) to actuate the vibration of piezoelectric transducers at high frequencies (hundreds of Hz) via magnetic interaction. The study here is brought back to two oscillators, coupled with each other through magnetic force. Furthermore, one of them is mutiphisically coupled for its piezoelectric nature. The mechanical schematization of the described system is shown in Fig. 5.2. Where .Z¨ is the imposed acceleration of the device. The mathematical modelling assumed for the piezoelectric beam is totally linear and represented by the Eq. (3.36). The modeling of the seismic mass, consistent with the schematic in Fig. 5.2 is a © The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5_5
75
76
5 PVEH and Magnetic Interaction
Fig. 5.1 Top (left) and lateral (right) of the device proposed in [1]. Adapted from [2] Fig. 5.2 Mechanical schematization of the system, adapted from [2]
linear mass-spring-damper oscillator. Overall, the differential system governing the problem is the following: ⎧ ⎪ ⎨m W¨ + cm W˙ + kl W − Θ V = −m z Z¨ + Fz (W, Ws ) . Ce V˙ + Θ W˙ + V /R = 0 ⎪ ⎩ m s W¨ s + cm,s W˙ s + ks Ws = −m s Z¨ − Fz (W, Ws )
(5.1)
The system described by the Eq. (5.1), is highly nonlinear due to the presence of the magnetic force . Fz . .m z plays the role of .m y defined in the previous Eq. (3.30). The component that is used for the activation of magnetic plucking, i.e. the vibration of the piezoelectric beam, is the z-component, according to the schematic in Fig. 4.2. The y-component of the force, does not appear in the model because it would induce an axial force in the cantilever with no effect on the bending vibration (the maximum displacement is assumed small enough to justify the assumption of linearized kinematics). In the following simulations, the experimentally measured magnetic force is implemented in the computational model using MATLAB.
5.1 Coupled-Oscillators Based Mechanism
77
5.1.1 Numerical Simulations A mesoscale case study is here considered. The magnets are the same of the experimental investigation in Chap. 4. Then, a unimorph piezoelectric cantilever is considered with 13 mm length and a width of 2 mm. The laminate section is composed of 200 .mm thickness of silicon layer under a lead zirconate titanate (PZT) film 200 .mm thick. The materials properties are summarized in Table 5.1 together S is expressed in terms of dielectric constant in vacuum, with all simulation data. .ε33 −12 .ε0 = 8.854 · 10 F/m. The mechanical quality factor . Q m is assumed equal to .250. So, it is possible to compute the damping ratio by definition: ζ =
. m
1 = 0.002 2Q m
(5.2)
The damping ratio is related to the damping coefficient through the following equation: .cm = 2mωr ζm (5.3)
Table 5.1 Parameters for the simulation of the case study Value Parameter .b .L .t P Z T .ttit .ρ P Z T .ρsil .E P Z T . E sil .ν P Z T .νsil .e31 .e33 .ε33 (ε0 )
s
.m s .ks .Qm .Q M .h .R
2 mm 13 mm 100 .µm 200 .µm 7.70 g/cm.3 2.33 g/cm.3 100 GPa 148 GPa 0.30 0.33 .−12 N/m/V .+20 N/m/V 2000 0.05 kg 60 N/m 250 40 1.0 mm 100 k.Ω
Meaning Cantilever width Cantilever length PZT thickness Silicon thickness PZT unit mass Silicon unit mass PZT Young’s modulus Silicon Young’s modulus PZT Poisson’s ratio Silicon Poisson’s ratio 31 piezoelectric constant 33 piezoelectric constant Relative dielectric constant Low-frequency mass (LFM) Stiffness of the LFM system Cantilever quality factor LFM quality factor Gap distance Load resistance
78
5 PVEH and Magnetic Interaction
The seismic mass has been conceived from a simple consideration: its oscillation must be as much as possible large when excited at the frequency content of the human motion. Environmental vibrations and also human movement have significant energy in the frequency band 0.5–10 Hz as described in the state-of-the-art. The mass has been chosen of 0.05 kg and connected to a stiffness of 60 N/m with resultant resonance frequency of about 5.5 Hz. Clearly, the combination of mass and stiffness that provides a specific frequency are infinite but consider, in this context, that small mass implies small device. For the LFM a quality factor. Q M of 40 has been adopted, which means a damping ratio of 0.0125. The analysis has been carried out with a harmonic monochromatic acceleration input on the entire device, amplitude 2g and frequency 3 Hz. This frequency has been choosen in order to represent realistic circumstances in which the natural frequency of the LFM is not exactly the frequency of the input signal. An arbitrary resistive load of 100 k.Ω has been used. Note that the natural frequency of the piezoelectric beam is 507.29 Hz. Computational analyses are presented both in repulsive and in attractive configurations in order to compare them by assuming the experimental interaction (. Fz ) with 1 mm gap distance. The Fig. 5.3 shows the displacement of the LFM over 60 s of operation and a close-up on 12 s of the repulsive case. From the results, the oscillation of the seismic mass is strongly disturbed by the magnetic interaction and does not reach a regime condition. This aspect is easily interpreted: in the presence of repulsive force, at each cycle the LFM is subjected to an impulsive load due to the unstable behaviour when the two magnets are aligned. The nonlinear effects are such that the system does not reach the orbit of oscillation which would be imposed by the simple harmonic forcing function. Figure 5.5 put in evidence the effect of the magnetic interaction on the vibration of the transducer, both in the attractive and in the repulsive configuration. After the magnetic interaction caused by sufficient closeness among the oscillators there is presence of free vibration of the beam at 507.29 Hz. However the mechanics of the plucking is different by considering repulsive (left) or attractive (right) configuration in Fig. 5.5. In the repulsive case, the deformation strain energy stored in the piezoelectric oscillator increases up to a certain value at which the magnetic force is no longer able to equilibrate the elastic restoring force; as a consequence a sudden trigger occurs in the transducer that starts to vibrate at its resonant frequency. Such oscillation is allowed by the fact that the LFM moves sufficiently far from the beam, decreasing the magnetic interaction. In the attractive case, the plucking is a bit different: as the seismic mass approaches the piezoelectric beam, due to the effect of magnetic interaction, it deforms towards the mass; then, the two systems start to move paired. This phase lasts up to the point at which the elastic restoring force of the beam becomes greater than the magnetic interaction attractive force. At that point the piezoelectric oscillator is suddenly released, and starts to oscillate around its stable equilibrium configuration in a regime of free damped vibrations. Other simulations have been conducted with attractive configuration. The Fig. 5.4 shows the displacement of the LFM over 60 s of operation and a closeup on 12 s. It is interesting to notice that in this case, opposite to the repulsive one, the system reaches a real regime vibration after the effect of the initial condition. In fact, in attractive scheme, the interaction is such that the motion is accelerated,
5.1 Coupled-Oscillators Based Mechanism
79
Fig. 5.3 LFM displacement over 60 s (left) and close up on 12 s (right), in the repulsive case. Adapted from [2]
Fig. 5.4 LFM displacement over 60 s (left) and close up on 12 s (right), in the attractive case. Adapted from [2]
Fig. 5.5 Detail on the free vibration state of the tip of the piezoelectric beam, in case of repulsive (left) and attractive (right) interaction. Adapted from [2]
80
5 PVEH and Magnetic Interaction
Fig. 5.6 Istantaneous power output for the repulsive (left) and attractive (right) interaction. Adapted from [2]
before the critical phase of energy exchange. After the plucking, the attraction tends to reclaim the mass, so practically there is a sort of affinity with the motion. In other words, the attractive interaction consolidates the trend of the uncoupled harmonically forced oscillator. It is an important result because it highlights the dependance of the qualitative dynamical response of the system by the poles orientation. The different behavior has effects on the power output as shown by the Fig. 5.6 in which the repulsive case recovers a larger amount of power than the attractive one. Such fact, can be easily explained by considering the inherent bistability of the system which allows also inter-well oscillations. A quantitative comparison is now introduced in terms of harvested power. In the repulsive configuration, peaks of power of the order of 3.9 mW are obtained; in the attractive configuration, the initial peak is 1.8 mW, then in the regime situation the power is 0.7 mW. This is an important result in both conditions if one consider that without the frequency up-conversion the transducer does not vibrate at 3 Hz with consequent zero energy harvested. For what concerns the integral terms, Table 5.2 summarizes the overall harvested energy and the RMS (Root-Mean-Square) voltage on a period of 60 s; in order to compute the mean power, the Joule’s Law is employed: .
Pmean =
VR2 M S R
(5.4)
The Table 5.2 contains also the results which are obtained if the experimental force is replaced by the Yonnet approximation described in Chap. 4. The obtained RMS voltage shows differences of 18 and 9% with respect the use of experimental data, for the case of attractive and repulsive configuration, respectively. Another interesting aspect is that if the Yonnet interaction is used, the attractive case corresponds to a larger amount of RMS voltage than the repulsive one. This is due to the shape of the Yonnet force-distance curve, that is lower than the real one for high relative distance. The particular nonlinear behavior of Fig. 5.3 is then practically lost. In fact, in this case the behavior of the oscillator is similar to the classical one as in Fig. 5.4.
5.1 Coupled-Oscillators Based Mechanism
81
Table 5.2 Synopsis of the results: RMS Voltage, Power and energy harvested over 60 s. E: experimental and Y: Yonnet interaction . V R M S [V] . Pmean [.μW] EH [mJ] Interaction Attr. (E) Rep. (E) Attr. (Y) Rep. (Y)
.1.45
.21.02
.1.26
.1.81
.32.76
.1.96
.1.72
.29.58
.1.77
.1.65
.27.22
.1.63
Additional simulations, here not reported extensively for the sake of brevity, confirm that, by increasing the gap distance, the relative difference of RMS voltage in case of using Yonnet or experimental data tends to vanish.
5.1.2 Remarks This section proposed the computational study of the magnetic FuC mechanism applied to a coupled-oscillators layout. The dynamical response in time-domain has been analyzed for realistic physical parameters and operational conditions. A harmonic, monocromatic acceleration has been imposed on the entire device with 2 g of amplitude and 3 Hz of frequency. Numerical simulations have been carried out both in repulsive and in attractive configuration of the magnets. The results, in terms of scavenged energy, are more promising when the FuC works in repulsive configuration, but interesting values for consumer applications emerge from both configurations. Over a working period of 60 s, with a resistive load of 100 k.Ω, the harvester can recover 1.96 mJ of energy for the repulsive configuration and 1.26 mJ for the attractive one. Interesting nonlinear effects emerge from the analysis that lead to different behaviors of the oscillators depending from the magnets configuration. The interpretation of such fact has been attributed to the different nature of the total potential energy of the system. The repulsive case is inherently bistable and the attractive one is monostable. The presented technique can be also implemented by using a simple free fall mechanism for the LFM. In that case, the movement of the mass would also be activated by completely random motion in terms of frequency and acceleration. However, as it will be shown, specific attention must be put on the velocity of such motion.
82
5 PVEH and Magnetic Interaction
5.2 Free-Fall Based Interaction 5.2.1 Introduction This section is devoted to the study of a magnetic plucking mechanism based on the interaction of a free-falling mass and a piezoelectric bimorph, both equipped with a permanent magnet. The falling height and the considered mass are typical of a mesoscale object, just to contextualize the study. In fact, in this context, there is no ambition to define a specific design, and the interest is put only on the physical response of the system. For such reason, and also to speed up the simulations, an inverse square force is used to model the magnetic force. Obviously, the rough approximation affects the numerical results but well represents the qualitative nonlinear dynamics of the system. The system to be studied is shown in Fig. 5.7. The moving mass, is allowed to fall freely by gravity from the predefined height H with respect to the reference system. It is equipped with a magnet like the piezoelectric beam. The mass has to be imagined encompassed in a frictionless vertical guide, so it has no possibility of altering the direction of its trajectory. The magnets are oriented with parallel magnetizations to the beam axis so that plucking occurs with the antisymmetric component of the magnetic force (see Chap. 4). The working principle of the mechanism is explained below. In approaching the beam, the mass gradually will be affected by the magnetic force which increases in magnitude and will have an influence on its law of motion. The dynamics of the moving mass is governed by Newton’s second Law, which can be expressed in vector form as follows: ma = Fmag + mg
.
(5.5)
where .a is the resultant acceleration, .g the gravity field acceleration, and .Fmag the magnetic force along the direction of motion. From the Eq. 5.5, it can be seen that the overall acceleration .a of the system is thus affected at each instant by the value of the magnetic force. As it will be seen from the computational analyses, the orientation of the magnetic poles (i.e., the sign of the magnetic force) will play a key role in the qualitative dynamic response of the system. If the magnets are placed at a sufficiently large initial relative distance among them, such that they do
Fig. 5.7 Schematic of the free fall-based mechanism with magnetic FuC
5.2 Free-Fall Based Interaction
83
not magnetically interact, in either pole orientation the mass will begin to fall under a condition of uniformly accelerated motion (i.e., constant acceleration and linear velocity in time) due to the action of the gravitational field alone. At a certain point, the magnitude of the magnetic force is such that it affects the motion of the moving mass, and the differences between repulsive and attractive configurations emerge, as explained in detail below. In the case of the repulsive force, the mass approaches the beam and is subjected to a force directed in the opposite direction to that of its weight, that is offered by the tip magnet of the beam (left of the Fig. 5.8). As a result, the acceleration of the mass will become nonlinearly variable and in the opposite direction to the gravity with consequent decreasing velocity. It may even happen, as will be seen, that the mass reverses its motion, rising up. Assuming that such a degenerate situation does not happen, the mass will at some point exceed the position of the beam (z .< 0 in the Fig. 5.7). At this stage, the beam will undergo an impulsive phenomenon and begins to vibrate if there is sufficient relative space in terms of interaction with the mass. The mass, will continue its fall, undergoing a force oriented as the weight force which (right in Fig. 5.8), according to Eq. (5.5), will induce an acceleration greater than gravitational one and nonlinearly varying. When the mass is at a relative distance greater than the interaction zone (that depends by the geometry of the magnets), it will continue to be subjected only to the gravitational field. From the dynamics point of view, the case of the attractive force is different. At the starting point, the mass moves by free fall with uniformly accelerated motion, as in the previous case. When the mass enters the space zone where the magnetic interaction is felt, it approaches the beam, which is deformed toward it, and the mass itself is affected by a force oriented as the weight force. Such force accelerates the mass further by increasing its velocity. When the mass overcomes the beam (i.e., moves into the half-space with z .< 0 in the Fig. 5.7), the opposite mechanism to the previous one occurs. The mass feels a force pushing it upward (where the beam is located) and tends to decrease its velocity. In the degenerate case, the mass feels an attraction such that it is “pulled back” by the beam and moves appaired with it, as will be shown in the following simulations.
Fig. 5.8 Schematic of the forces acting on the mass in the repulsive case before the plucking of the beam in the zone z .> 0 (left) and after the plucking (right) in the zone z .< 0 considering the reference system of the Fig. 5.7
84
5 PVEH and Magnetic Interaction
5.2.2 Numerical Simulations Numerical simulations, are carried out considering a drop height equal to H .= 9 mm and a bimorph piezoelectric cantilever, in which the active material is PZT and the structural layer is Titanium. The physical and geometrical features are summarized in the Table 5.3. The considered cubic Neodymium magnet, has a side length of 2 mm, and a peak force F.0 equal to 2.33 N is used to set the Eq. (4.10). In the following, first, time domain simulations are presented both for the attractive and the repulsive configurations with some “test” values of the falling mass. Next, parametric analyses in the mass and electrical load are presented to show the trend of the dynamical system.
5.2.2.1
Time-Domain Response of the System
Simulations have been carried out using a gap distance between the magnets equal to h .= 0.5 mm. An arbitrary resistor of 100 k.Ω is adopted, and the evaluation is done for both the attractive and repulsive configurations. The analyses consist of computing and observing the dynamic response of the system during the mass falling and plucking phase of the piezoelectric cantilever in terms of tip displacement, phase portrain in time, voltage, and instantaneous power.
Table 5.3 Physical and geometrical parameters of the piezoelectric beam Meaning Parameter Value .b .L .t P Z T .tsil .ρ P Z T .ρtit .E P Z T . E tit .ν P Z T .νtit .d31 .ε33 (ε0 )
s
.Q .h
1.5 mm 9 mm 280 .µm 65 .µm 7.50 g/cm.3 2.33 g/cm.3 60 GPa 115 GPa 0.30 0.34 212 pC/N 2000 100 0.5 mm
Cantilever width Cantilever length PZT thickness (each layer) Silicon thickness PZT unit mass Titanium unit mass PZT Young’s modulus Titanium Young’s modulus PZT Poisson’s ratio Titanium Poisson’s ratio 31 piezoelectric constant Relative dielectric constant Quality factor Gap distance
5.2 Free-Fall Based Interaction
5.2.2.2
85
Attractive Configuration
In this paragraph the results of the attractive case are discussed. On the left of the Fig. 5.9 it is possible to see the motion of the seismic mass (called low-frequency magnet mass for simplicity). It is initially parabolic, as imposed by the gravitational field. At a certain point, the motion is deflected due to the presence of the magnetic interaction. The tip magnet of the beam is located in the plot of the Fig. 5.9 at the height 0 m, and around that position the interaction is strong, the mass locally accelerates (see trend of the red curve on the left of the Fig. 5.9). It is important to point out that when the mass reaches the end of the stroke (value .−0.009 mm), its position is then held constant. It is not planned to model the impact of the mass with the end of the stroke. In fact, the interest here is put only on the magnetic plucking. To the right of the Fig. 5.9 is represented the cantilever tip vibration at 1.45 kHz. It can be seen how initially the tip moves upward due to the magnetic attraction (up to almost 150 .mm). Then, a free oscillation phase occurs, still disturbed by the nonlinear phenomenon as will be seen in detail in Chap. 7, about the dynamics of the magnetic plucking. In Fig. 5.10, the phase portrait of the tip of the beam is depicted. The plots in the Fig. 5.11, represent the voltage (left) and instantaneous power (right) associated to the mechanical vibration. Figure 5.12, shows what can happen if the mass is too small in value: after passing in front of the beam, it is pulled back, because the energy provided by the weight force cannot overcome the energy associated with the positional force that draws the beam upward. Then, it starts the previously mentioned oscillating phase in paired positions between the mass and the tip of the beam.
Fig. 5.9 Position versus time of the moving mass and the tip beam (left), zoomed plot of the tip beam vibration (right) with m .= 0.002 kg
86
5 PVEH and Magnetic Interaction
Fig. 5.10 Phase portrait in time of the tip beam, attractive configuration, R.= 100 k.Ω, h.= 0.5 mm, m .= 0.002 kg
Fig. 5.11 Voltage response (left) and istantaneous power (right), R .= 100 k.Ω, h .= 0.5 mm, m .= 0.002 kg
Fig. 5.12 Position versus time of the moving mass and the tip beam (left), zoomed plot of the tip beam vibration (right) with m .= 0.001 kg
5.2 Free-Fall Based Interaction
5.2.2.3
87
Repulsive Configuration
In this case, the degenerate behavior is first presented. If the value of the moving mass is below 13 g, it cannot overtake the beam. The Fig. 5.13 shows such result. For the cases of 1 g, (label 1 g, in Fig. 5.13) a rebound occurs without perception of cantilever deflection. From 5 to 12 g, not reported here for the sake of brevity, a displacement of the beam tip can be perceived. From 13 g the system works but no significant oscillations are appreciated. For the case with moving mass equal to 20 g, the Fig. 5.14 (left) shows the phase portrait in the time domain, and the shape of the orbits is very different from the previous case; they are less centered around the undeflected position point, before arriving there, due to the repulsion effect. The same Fig. 5.14, shows (right) the vibration of the tip of the beam. The Fig. 5.15 shows the instantaneous voltage (left) and power (right) of the system. The presented example is illustrative of the typical dynamics in the repulsive case, should plucking occur.
Fig. 5.13 Position versus time of the the moving mass and the tip of the piezoelectric beam for different values of the moving mass
Fig. 5.14 Phase portrait in time and tip beam vibration in the repulsive case. R .= 100 k.Ω, h .= 0.5 mm, m .= 0.02 kg
88
5 PVEH and Magnetic Interaction
Fig. 5.15 Voltage and istantaneous power in the repulsive case. R .= 100 k.Ω, h .= 0.5 mm, m .= 0.02 kg
5.2.2.4
Parametric Analyses
In this section, the result of the parametric study with respect to the moving mass m and the resistor R is presented. The results are reported in terms of peak voltage and instantaneous power, RMS voltage on a single plucking event, and the resulting average power calculated with Joule’s Law over a resistor. It is reported also the energy harvested during the plucking event, and efficiency of the system in terms of the ratio such energy and the initial potential energy of the moving mass. The range [1.4, 30] grams has been considered for the mass values, and the range [0, 1.5] M.Ω for the resistors. Below 1.4 g the attractive system does not work. The repulsive system, on the other hand, is represented only above 17 g because although as seen above it can work from 13 g, it has negligible oscillations until 17 g. The plots in the Fig. 5.16 represents peak voltages (left) and peak powers (right). The same plots depict both the surface associated with the attractive and repulsive cases. The same criterion is assumed for all the other following plots. The Fig. 5.17 represents RMS voltage (left) and the associated average power (right). The Fig. 5.18 shows the energy obtainable for a single magnetic plucking of the cantilever (left) and the output energy values (E.out ) normalized with respect to the initial potential energy value of the moving mass (E. pot ). In terms of efficiency, the attractive system is advantageous simply because it can work with very small masses (i.e. low potential energy), contrary to the repulsive case. However, in terms of energy, if both mechanisms work (above 17 g) the repulsive one allows to scavenge more energy. In terms of instantaneous peak power, the plot of the Fig. 5.16 shows that there are different optimal resistive load values for the attractive case (70 k.Ω) and the repulsive one (200 k.Ω). The difference can be explained by the fact that the two systems have very different inherent dynamics. The analyses are also reported for the case with the piezoelectric layers connected in series only for voltage and peak power as shown in Fig. 5.19. Although, the voltage values are higher than the parallel connection layout [3], the qualitative response of the system is the same. Obviously, the presented results are used to observe the system
5.2 Free-Fall Based Interaction
89
Fig. 5.16 Peak voltage (left) and peak of the instantaneous power (right) for piezoelectric layers in parallel connection, h .= 0.5 mm
Fig. 5.17 RMS voltage (left) and average power (right) for piezoelectric layers in parallel connection, h .= 0.5 mm
response with an assumed mathematical model, but particular attention should be paid to the voltage values of the piezoelectric layer. Their magnitude may be such that they activate material nonlinearities, as will be shown in Chap. 7.
90
5 PVEH and Magnetic Interaction
Fig. 5.18 Energy harvested over a single plucking event (left) and related normalized energy harvested with respect to the initial potential energy of the moving mass
Fig. 5.19 Peak voltage (left) and peak of the instantaneous power (right) for piezoelectric layers in series connection, h .= 0.5 mm
References 1. Corigliano A, Ardito R, Gafforelli G, Procopio F, Valzasina C (2015) Piezoelectric transducer for an energy-harvesting system, US 20150035409A1, 02-05-2015 2. Rosso M, Corigliano A, Ardito R (2022) Numerical and experimental evaluation of the magnetic interaction for frequency up-conversion in piezoelectric vibration energy harvesters. Meccanica 57:1139–1154 3. Erturk A, Inman DJ (2011) Piezoelectric energy harvesting. Wiley
Chapter 6
Hybrid-Broadband Energy Harvester (HEH): Magnetic Plucking and Indirect Impacts
This chapter presents the design and the experimental characterization of a mono-axial low-frequency piezoelectric vibration energy harvester based on the innovative combination of the magnetic plucking and indirect impacts of a moving mass on the package of the harvester. After some considerations about the working principle, the manufacturing data are presented. An experimental study is then carried out by fastening the device to the wrist of a person for different human motion activities. Some considerations are presented about poles orientation of the magnets, circuitry and input condition. The result of this study shows that the combination of magnetic plucking and indirect impacts triggers the effective scavenging of electrical energy even from low-frequency non-periodical mechanical movements, such as human motion, while preserving the reliability of piezoelectric components.
6.1 Introduction and Motivations As discussed in the state-of-the-art, indirect impacts and magnetic interaction are used for widening the operational bandwidth of PVEH. However, the literature about the impacts is sharply separated with respect to the literature on the magnetic interaction. In this chapter, the combination of these techniques is presented with an applicative approach. The device is fabricated with commercial bimorph and magnets.
6.2 Description, Design and Fabrication The working principle of the proposed PVEH is schematically represented in Fig. 6.1. It is composed of a piezoelectric beam and a nonmagnetic moving mass constrained in © The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5_6
91
92
6 Hybrid-Broadband Energy Harvester (HEH) …
Fig. 6.1 Conceptual illustration of the device, xy plane (left), A-A section view, xz plane (right), adapted from [1]
Fig. 6.2 Illustration of the magnetic plucking mechanism: the mass approaches the cantilever (left), and high frequency vibrations of the piezoelectric cantilever after the snap for attractive interaction, adapted from [1]
a translational guide, both equipped with a permanent magnet. A permanent magnet is placed on the tip of the piezoelectric beam to enable the magnetic interaction. Another permanent magnet is attached on a side of the moving mass, disposed in front of the piezoelectric cantilever (see Figs. 6.1 and 6.2). The magnets can be arranged both in attractive and repulsive configurations. Parallel magnetization vectors . J and , . J are considered, aligned with the longitudinal axis of the beam, as indicated in Fig. 6.2. With the represented orientation of . J and . J , the magnetic force between the magnets is attractive. If the mass moves due to an external forcing input, the magnetic interaction between the two permanent magnets should cause the plucking phenomenon explained in the previous chapter, which causes free oscillations of the beam, as represented on the right of the Fig. 6.2. In addition to the previous mechanism, when the mass collides with the harvester package the generated impact activates additional mechanical vibrations in the piezoelectric cantilever through the clamp.
6.2 Description, Design and Fabrication
93
With the proposed combined mechanism, it is possible to harvest electrical energy from low-frequency non-periodical mechanical movements thanks to the broadband behavior guaranteed by the magnetic interaction and the impacts, while safeguarding the reliability of the brittle piezoelectric beam. Furthermore, the hybrid mechanism guarantees that if the plucking does not occur, the harvester can operate with impacts only. The piezoelectric beam and the mass can be modelled separately and then put in a global model coupled by the presence of the magnetic force and the impact. The modeling that can be adopted for the piezoelectric beam has been derived in the Chap. 3 (linear and nonlinear). Furthermore, the dynamics of the moving mass is described by the Newton’s Second Law applied to a rigid body subjected to an external acceleration, a magnetic force, and to the gravity field in case of vertical motion. The differential systems which governs the problem is the following: ⎧ ⎪ ⎨m U¨ (t) + c M U˙ (t) + kl U (t) − Θχ V V (t) = f imp + f mag + f g − m z Z¨ . C0 V˙ (t) + Θχ V V˙ (t) = VR(t) ⎪ ⎩ Ma = −m z Z¨ − f mag + f G − f imp
(6.1)
where. M is the moving mass,.m z plays the role of.m y defined in the Eq. 3.30.. f g and. f G are the gravity loads for the cantilever and the moving mass, respectively. . f mag is the plucking magnetic force, . f imp is the impact force, . Z¨ is the input acceleration and .a is the resulting acceleration on the moving mass in accordance with the Newton’s Law. The other coefficients have been defined in Chap. 3. For the attractive configuration of magnets, the system is monostable. Conversely, for repulsive configuration the system is bistable and two symmetric potential wells are present and so, intra-well (small) or inter-well (large) oscillations are possible. The system is nonlinear also for the presence of indirect impacts . f imp . The impulses on a flexible structure can be modeled via power series for the forcing function [2] or by considering vibrations at the clamp [3]. The 3D structure of the mono-axial piezoelectric harvester is illustrated in Fig. 6.3. The device is composed of a polyamide package, with a size of 35 .× 34 3 .× 20 mm. in which there are two main slots used to host the piezoelectric cantilever beam and the moving mass, respectively. Between the two slots, a certain zone is used to set the gap distance between the magnets of less than 1.0 mm. The top and lateral faces of the device have been covered with a plexiglass plate, as shown in Fig. 6.4. The moving mass is a cube of 13 mm side length and with a mass of 0.017 kg, made of non-magnetic steel AISI 316. This material was chosen to avoid affecting the magnetic field provided by the equipped magnet. The Neodymium magnets are cubic with a 3 mm side length and a magnetization of 1.32 T. The piezoelectric beam is a commercial bimorph element RS 285–784, RS Components® with the piezoelectric layers connected in series. Its characteristics are summarized in Tables 6.1 and 6.2. A titanium structural layer is enclosed in two PZT layers, and the effective length is 10.5 mm due to the realization of the clamp. A copper foil on FR4 has been attached on the bottom face of the device orthogonal to the guide direction to weld the electrical connections.
94
6 Hybrid-Broadband Energy Harvester (HEH) …
Fig. 6.3 Illustration of the package of the piezoelectric energy harvester designed with c adapted from [1] Solidworkso,
Fig. 6.4 Left: lateral view of the assembled prototype. Right, from top to bottom: top view of the prototype and detail of the arrangement of the permanent magnets inside the moving mass, adapted from [1] Table 6.1 Physical parameters of the piezoelectric beam 3 Material .ρ [kg/m. ] E [GPa] .ν [–] Titanium PZT
4500 7500
115 60
0.3 0.3
Table 6.2 Dimensions of the piezoelectric beam t [mm] Width [mm] Material Titanium PZT
0.065 0.280 per layer
1.5 1.5
.d31
[pC/N]
– 212
.ε33
s
– 2000
Length [mm] 15 15
6.3 Experimental Study
95
Fig. 6.5 Experimental setup with indication of the all equipment and the prototype, adapted from [1]
6.3 Experimental Study Experimental tests have been carried out to investigate the magnetic plucking mechanism, the effects of indirect impacts in realistic situations of human motion and the performance of the device under different magnetic configurations and electrical circuitry. Specifically, the combined effect of magnetic plucking and indirect impacts has been tested with the proposed device and compared to the case of indirect impacts only. In case of the presence of magnetic plucking, both the repulsive and the attractive configurations of the magnets have been considered. Figure 6.5 shows the experimental setup with the indication of the involved components. Two kind of electrical circuits have been considered: resistive circuit and a passive diode-based voltage-doubler rectifier feeding a storage capacitor. To measure the input acceleration on the harvester during the experiments a triaxial accelerometer has been used (STMicroelectronics IIS3DWB). Experimental modal analysis has been performed for each condition of interaction between the moving mass and the piezoelectric beam. The first eigenfrequency of the cantilever is 659.2 Hz, 665.2 Hz, and 668.3 Hz for repulsive, no magnetic interaction and attractive cases, respectively. Through a MATLAB program, in which the modelling of the piezoelectric cantilever has been implemented [332], an eigenfrequency of 672.5 Hz is obtained without interactions. This value is 1% larger than the experimental one, because of the discretization approach. For further details about the modal analysis, see [1].
96
6 Hybrid-Broadband Energy Harvester (HEH) …
Fig. 6.6 Voltage response in case of linear system (left) and with repulsive interaction and indirect impacts with a load resistance of R .= 100 k.Ω, adapted from [1]
Tests with a Connected Circuit The combined effect of indirect impacts and magnetic interaction is investigated first in the case of connection with a load resistance R .= 100 k.Ω. The device has been tested for hand shaking acceleration input signal with and without the presence of the moving mass in the slot by recording also the values of the accelerations achieved. Figure 6.6 (left) shows the voltage response of the bare system (i.e., no magnetic plucking, no impact) with evidence of peak voltage less than 0.15 V. Figure 6.6 (right) reports the voltage response considering the combined actuation of the magnetic plucking and the impacts. Peaks of more than 15 V in absolute value have been correctly detected. This different behavior is expected since the bare system works in the linear regime and has its maximum energy-conversion effectiveness when operated at the resonance, i.e., at 665.2 Hz in the present case, but the input excitation imparted by the shaking is far from this condition. In the repulsive configuration represented in Fig. 6.6 (right), 9.82 .mW of average power are obtained through the Joule’s Law applied to the voltage across R, which corresponds to an energy dissipated in the resistor of 19.63 .mJ over 2 s of experiment computed by integrating the average power over time. In Fig. 6.7, a zoom of the voltage is proposed, in case of repulsive and attractive configurations, respectively. Specifically, peak voltages of 6 V and 1.5 V have been obtained in the magnetic plucking phase MP, for repulsive and attractive configurations, respectively. During the indirect-impact phase II, the magnitude of the voltage is comparable for the two configurations. Therefore, at parity of experimental conditions with comparable mechanical excitation employing the repulsive configuration, it is possible to further increase the electromechanical effectiveness of the piezoelectric converter compared to the attractive configuration. This is due to the bistable nature of the repulsive scheme that allows also inter-well oscillations [4]. To power the electronics within a sensor module, AC voltages provided by the piezoelectric converter must be rectified. Therefore, voltage-doubler rectifiers based
6.3 Experimental Study
97
Fig. 6.7 Close-up on voltage responses in case of load resistance, R .= 100 k.Ω, for repulsive case (left) and attractive case (right). MP-magnetic plucking, II-indirect impacts. Adapted from [1]
Fig. 6.8 Schematic of the electrical configuration of the proposed energy harvester, adapted from [1]
on passive diodes were employed to charge a single storage capacitor .C1 = 1 .µF, as reported in Fig. 6.8. Voltage on the capacitor was acquired by employing a Keithley 6517A electrometer used as a voltage buffer with an input impedance equivalent to capacitor .C0 = 20 pF in parallel with a resistor . R0 .> 200 T.Ω. . R p is the internal resistance of the piezoelectric layer, generally neglected in the modelling [6]. The triaxial accelerometer and the device have been tied to the wrist of a person. Tests have been performed both in case of shaking and running activities. The shaking has been performed mainly in the direction of the guide (z-axis in Fig. 6.1) for activating the mechanism. For the running activity, instead, the motion guide has been oriented orthogonally to the axis radius of the human arm. In Fig. 6.9, the typical accelerogram and the FFT of the shaking is represented. For details of the signal in case of the running, see [1]. In the plots of Fig. 6.9, the z-component is parallel to the motion axis of the mass. The time histories of acceleration have been recorded for each different test and they
98
6 Hybrid-Broadband Energy Harvester (HEH) …
Fig. 6.9 Shaking signal, accelerogram (left), Fast Fourier Transform (right), adapted from [1]
Fig. 6.10 Voltage (left) and energy harvested (right) in case of shaking with capacitive circuit = 1µF, adapted from [1]
.C 1
are comparable in terms of the amplitude of acceleration and in frequency content. In general, the acceleration related to shaking is larger than the one for running [1]; moreover, the dominant frequency for shaking is around 6 Hz, whereas in the case of running, the dominant frequency is around 3 Hz. The plots in Figs. 6.10 and 6.11 report the voltages and the scavenged energy, computed through the formula: .
E=
1 C1 vc2 (t) 2
(6.2)
where .C1 is the storage capacitance and .vc (t) is the measured voltage. Figure 6.10 (left) shows.vc (t) as a function of time in case of shaking while Fig. 6.10 (right) shows the corresponding energy harvested computed through Eq. (6.2). In this case, the magnetic interaction improves the scavenged energy (blue and black curves) in comparison to the harvester with the presence of indirect impacts only (red curve). The repulsive configuration is more promising in terms of scavenged electrical energy, at parity of experimental conditions, compared to the attractive and indirect impacts
6.3 Experimental Study
99
Fig. 6.11 Voltage (left) and energy harvested (right) in case of running with capacitive circuit = 1µF, adapted from [1]
.C 1
configurations, since 253.41.mJ, 70.32.mJ and 37.35.mJ have been harvested, respectively. For the case of running activity, represented in Fig. 6.11, the behavior is reversed. Within 40 s of operation, the system recovers 0.61 .mJ, 2.47 .mJ, and 4.30 .mJ, in the cases of repulsive, attractive, and with only indirect impacts, respectively. The explanation of the results in Figs. 6.10 and 6.11 is related to the fact that for shaking, in accordance with Fig. 6.9, the acceleration along the guide axis is higher than the corresponding value for the running activity [1]. For shaking, the inertia force on the moving mass is capable to overpass the potential barrier due to magnetic interaction, so that a cycle of events is periodically repeated, with magnetic plucking and impacts of the mass. The combination of repulsive interaction and indirect impacts represents the more promising configuration in terms of output voltage, as expected in view of the abrupt snap induced when the potential barrier is overpassed. Conversely, in the case of running the input acceleration is small along the guide. The potential barrier is not exceeded, and two possible scenarios arise: in the case of repulsive configuration, due to the bistability, the mass is entrapped in the intra-well oscillation, with limited motion as shown in Fig. 6.12 (left). The magnetic snap does not occur and the measured final voltage, after 40 s, is less than 2 V. In the case of attractive configuration, the moving mass is attracted by the cantilever, and then it is subjected to small nonlinear oscillations around a stable configuration, as shown in Fig. 6.12 (right). In this situation, the impacts are excluded. As a consequence of the continuous oscillation of the cantilever, the measured voltage is larger than the repulsive case, but smaller with respect to impacts. The results of the experiments point out an important aspect: if the magnetic plucking occurs in addition to the indirect impacts, the benefit is guaranteed both in attractive and in repulsive configurations. In fact, despite the accelerograms being slightly different, it can be stated that in the case of shaking, the repulsive layout has a gain of about 7 times in terms of energy harvested with respect to the case of the only indirect impacts, over 50 s. In comparison with the attractive scheme, the same solution has a gain of twice as much. On the other hand, if the magnetic
100
6 Hybrid-Broadband Energy Harvester (HEH) …
Fig. 6.12 Working cycles in the case of low-level input acceleration (such as for the running activity): repulsive interaction (left); attractive interaction (right), adapted from [1]
interaction is present but the plucking does not occur, the magnets are deleterious for the presented energy harvesting system, as experimentally demonstrated by the running activity in Fig. 6.11. The experimental results show different behavior for different user activities. An enhancement of the performance in terms of energy is exhibited in case of combined effects of indirect impacts and magnetic interaction for shaking. This is due to the important role played by the energy of the moving magnet (i.e., the moving mass) that affects the possibility to overpass the potential barrier and to induce the magnetic plucking mechanism. The combination of magnetic plucking and indirect impacts is effective and promising, but the device should be properly engineered in order to induce the correct working cycle. This means that the magnetic force should be tuned with reference to the available external acceleration, that must be sufficient to overpass the magnetic barrier and to trigger the bistable behavior and the subsequent impacts.
References 1. Rosso M, Nastro A, Baú M, Ferrari M, Ferrari V, Corigliano A, Ardito R (2022) Piezoelectric energy harvesting from low-frequency vibrations based on magnetic plucking and indirect impacts. Sensors 22:5911 2. Ju S, Ji CH (2018) Impact-based piezoelectric vibration energy harvester. Appl Energy 214:139– 151 3. Halim MA, Kabir MH, Cho H, Park JY (2019) A frequency up-converted hybrid energy harvester using transverse impact-driven piezoelectric bimoprh for human-limb motion. Micromachines 10(701) https://doi.org/10.3390/mi10100701 4. Rosso M, Corigliano A, Ardito R (2022) Numerical and experimental evaluation of the magnetic interaction for frequency up-conversion in piezoelectric vibration energy harvesters. Meccanica 57:1139–1154 5. Clough R, Penzien J (2003) Dynamics of structures, 3rd edn. Computer & Structures Inc., Berkeley, USA 6. Erturk A, Inman DJ (2011) Piezoelectric energy harvesting. Wiley
Chapter 7
Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
This chapter presents a specific investigation on the dynamics of the magnetic plucking phenomenon. In particular, the role of the interaction speed between permanent magnets is first studied. Preliminary investigations are presented, in which unexpected phenomena emerge which are then explained as inherent nonlinearity of the active material. Specialist investigations carried out with more advanced equipments are subsequently presented, with a clear interpretation of the problem. The effect of other parameters on the nature of plucking is studied, such as resistive load, and the gap between magnets. An advanced computational model is then suitably calibrated through the experimental data for a reliable simulation tool.
7.1 Motivations From Chap. 6, it emerged concerning that the magnetic interaction can widen the operating band but at the same time it can not be very efficient, in the sense of the activation of the first vibrational mode of the transducer. It is supposed that, if the magnetic interaction occurs but the vibrational mode does not appear, the relative velocity between the magnets during their interaction (in the follow velocity of interaction) is too low and the magnetic force is not so impulsive. In even more complex cases, where the velocity is very low (approximately less than 0.5 m/s) and also the energy values of the moving system are not sufficient to overcome energy associated to the elastic restoring force, and the magnetic force in the repulsive case, even the broadband behavior may not even activate (see running tests in Chap. 6). In such cases the use of additional band-widening mechanisms or FuC is needed (e.g. indirect impacts). In the following the focus will be put on the effect of the velocity of the interaction on the dynamical behavior of the magnetic plucking.
© The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5_7
101
102
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
The concept of the dependence of the impulsivity of the magnetic force is obviously related to its spatial-dependence, which implicitly links it to the time-derivative of the relative position change between the magnets: the higher the derivative (i.e., the velocity) the more impulsive the load will be. The goal of this investigation is the observation of this dependence, to be certain of the scientific hypothesis made. If the concept is verified, there are immediate practical implications: the feasibility of magnetic FuC would be strictly related to the velocity amplitudes involved (not the frequencies!) and the stroke available to the moving magnet at high accelerations amplitudes (several g). During the investigation, some unexpected phenomena emerged. In particular, frequency shifts of the first vibrational mode of the piezoelectric beam in dependence on the speed of interaction between the magnets have been observed. This effect was later attributed to the inherent nonlinearity of the material, a phenomenon that will be further presented. This observation opened a parallel challenge to the investigation on the influence of the interaction velocity: the refinement of a reduced-order model that would take these aspects into account. The nonlinear nonconservative model presented in Chap. 3, (Eq. (3.73)) was used with a calibration on experimental results.
7.2 Preliminary Investigations To experimentally observe the dynamics of magnetic plucking, the system shown in Fig. 7.1 (left) is devised. It is composed of a piezoelectric cantilever equipped with a permanent magnet and another magnet attached to an externally driven moving mass that will later be referred to as a seismic mass or actuator. The idea is to move that mass with assigned constant velocity and to measure the voltage response of the transducer. At the preliminary stage, there is no interest toward the harvested energy from the system, the focus is put on the physical phenomenon, so it is decided to make observations in open circuit. For the realization of the aforementioned scheme, a layered bimorph RS PRO components 285–784 model is employed, the same one used in the prototype realization of Chap. 6. The magnets are the same as in the investigations of Chap. 4. A robot arm Fanuc M-710iC/45M (High inertia version) was used for the implementation of the moving magnet motion. The numerical programming of the trajectory and law of motion make it versatile for the purposes of this research. According to the scheme on left of the Fig. 7.1, the robotic arm was programmed to follow an horizontal rectilinear trajectory, and perpendicular to the cantilever axis. In this layout, the bending vibration is orthogonal to the direction of the gravitational field. The cantilever with the tip magnet was clamped to a Polyamide (PLA) support, and then the system was then constrained to a workbench via a vise as indicated in the right of Fig. 7.1. The robot has technical limitations in relation to its speed: the guarantee of straight motion is gradually lost as speeds increase. At 2.9 m/s it has been measured in tests that there are oscillations of the arm in the horizontal plane (the one in which the vibration of the beam is activated) that are in the order of half a
7.2 Preliminary Investigations
103
Fig. 7.1 From left to right, schematic of the concept of the experiment, clamp and cantilever used in the early investigation
millimeter of displacement. This is not acceptable for tests in which the gap between the magnets, generally in the order of a millimeter, plays an important role on the dynamical response. However, up to 2.5 m/s, the deviation from the programmed trajectory is practically absent, and this value was used as an upper limit in tests. The limitation is quite reasonable considering that such a robot has a working range of 2606 mm and is designed to work in environments different than experiments at the millimeter scale. The following values of velocity of the robotic arm have been considered: 0.50, 1.00, 1.50, 1.75, 2.00, 2.25, 2.50 m/s, and gap distance between magnets h .= 1.0, 1.5, 2.00 mm. The voltage signals are acquired with an oscilloscope Agilent Infiniivision MSOX2021A, with a bandwidth of 200 MHz and a maximum sample rate of 1 GSa/s per channel (4 channels). The moving magnet was attached to the end plate of the robotic arm through a stiff wooden rod. It provides transparency to the magnetic field, and the involved forces are not such as to have deformations that compromise the validity of the test. The complete experimental setup is shown in Fig. 7.2.
7.2.1 Experimental and Numerical Investigation As a first experimental investigation, a series of experimental modal analyses are conducted. The idea is to perturb the cantilever clamp with a hammer by providing a pulse and record the voltage time-history response. The response is then processed by means of FFTs. Several tests were carried out, which are shown in the graph
104
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
Fig. 7.2 Picture of the whole experimental equipment
in Fig. 7.3. The frequency of the beam is 656.97 Hz, while the value calculated by MATLAB.® code in linear piezoelectricity (Eq. (3.36)) is 672.52 Hz and with the software ABAQUS Simulia equal to 675.64 Hz. The difference can be attributed to the used discretization but also to the compliance of the real constraint of the beam which is not perfectly reflected in an idealization assumed in the numerical codes (i.e. perfect clamp). By using the modal analysis, the quality factor Q has been calculated with the logarithmic decrement method [1] and it is found to be about 16. In the following, the results are reported for a gap distance between magnets equal to 1.5 mm, and for all values of velocities of interaction. Together with the experimental response, the comparison with the numerical simulation is reported. In the numerical model, the experimental magnetic force of the Chap. 4 has been implemented. Looking only at the experimental responses some general observations can be made. First, what has been hypothesized takes place: as velocity increases gradually the first mode is activated (see Fig. 7.3). The vibration is characterized by a nonsymmetrical trend with respect to the time axis, and this may be an indication of nonlinearity. The simulation captures the phenomenon practically only in the quasistatic case, without free vibration (0.5 m/s case of Fig. 7.3) and for higher values of velocity the behavior is not correctly simulated. The magnetic interaction phase
7.2 Preliminary Investigations
105
Fig. 7.3 Voltage time histories for different velocities of magnetic interaction (0.5–2.5 m/s). Experimental versus numerical (linear piezoelectricity) results
is also perfectly captured. However, after this phase the agreement is lost. There seems to be an underestimation of the beam stiffness. The coercive electric field of the PZT is not provided by the supplier but consider that in accordance with [2] it can be assumed around 8e10.5 V/m for a PZT-5H. Nonetheless, some non reversible depolarization phenomena can occur at much lower values, like 3e10.5 V/m. This value of electric field corresponds to a voltage across the piezo of about 84 V for each layer. Having uncertainties about the technical data of piezo that are
106
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
Fig. 7.4 Voltage FFTs responses at different velocities of magnetic interaction, for h .= 1.5 mm and h .= 2.0 mm. The red arrows indicate the versus of frequency shift of the first vibrational mode
not provided by the manufacturer, it cannot be ruled out that the threshold may be even lower. Considering the involved voltage values, the presence of non reversible ferroelectric nonlinearities cannot be ruled out, making the interpretation of results with consciousness very difficult at this point. By analyzing the FFTs in Fig. 7.4 it is possible to detect two peaks: the first peak is related to the magnetic plucking and the second one (at higher frequency) to the first bending mode of the beam. An interesting phenomenon is also observed: for increasing velocity, the second peak of the FFT shifts to lower values of frequency even for relatively low values of velocity. The first bending mode is detected at a frequency lower than the measured in the modal analysis, this is another feedback about possible nonlinearities in the system. Obviously, the FFTs derived with the code, not shown here for brevity, do not show the shift; the model is only able to capture the frequency of the beam in linear regime and magnetic interaction. Moreover, according to the results in the Fig. 7.4, the frequency shift is more pronounced in the case of the smallest gap h .= 1.5 mm, in which, higher strain values (and thus voltage) are involved than in the case with h .= 2 mm. The reason is that the magnetic force is larger for the lower gap. Other nonlinear phenomena are ruled out: a critical Eulerian buckling load was calculated for the beam equal to about 44 N, very far from the magnetic force values, which are always less than 3 N. Such value is declared by the manufacturer when the magnets are perfectly in contact. The only source of nonlinearity can therefore be related to the inherent electromechanical behavior of the material and dissipative phenomena.
7.2.2 Remarks and Subsequent Step The most rational way to approach the problem turns out to go step by step: first, a piezoelectric beam with detailed description of physical-mechanical properties must be found. Then, it is convenient to work in lower voltage values to be sure to exclude dielectric-type nonlinearities (far from coercive or depolarization values
7.3 Inherent Nonlinearities
107
that become a problem for the application), and to have the possibility to observe only ferroelastic-type. It is then useful to experimentally characterize a structural beam element for two reasons: to get an idea of the accelerations level and electrical voltages such that nonlinearities are observed, and also to calibrate a possible more advanced computational model (i.e., nonlinear and nonconservative). The work at that point is not finished: the nonlinear magnetic plucking should be studied, with the effect of the velocity of interaction, by using also the reliable numerical model. So the final goal is to describe accurately the nonlinear magnetic interaction with also inherent nonlinearity of the piezoelectric material.
7.3 Inherent Nonlinearities As mentioned at the end of the previous paragraph, before going into the study of velocity of interaction and plucking, inherent nonlinearities have been considered. First of all, the nonlinear model (3.73) has been implemented in computational code working in time domain. In fact, one of the objectives is to use the code to simulate the response behavior to a transient phenomenon (magnetic interaction) and therefore the time-domain numerical integration is necessary. The analytical integration of the system under harmonic forcing was carried out in [3] with the harmonic balance method also in the context of actuation. After the implementation, to fully understand the electromechanical behavior of the bimorph, a complete experimental characterization of a piezoelectric beam has been made. The experimental results have been then used to fit the numerical model. Various aspects have been investigated in the experiments: • observation of the softening phenomenon; • dependence of softening phenomenon with respect to the load resistance R; • get an idea of realistic values of amplitude of acceleration at which nonlinearities are observed for a bimorph at the centimeter scale; • observing the backbone curve of the nonlinear electromechanical system; • using the experiments to fit the numerical model. Subsequently, the results for the investigation of the plucking velocity are presented together with some comparisons with the numerical simulation.
7.3.1 Implementation of the Nonlinear Nonconservative Electroelastic Model The unified nonlinear electroelastic model of Eq. (3.73) has been implemented in a first phase without considering the magnetic force but only with the presence of the harmonic monocromatic forcing function. The differential system is solved via
108
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
Table 7.1 Physical and geometrical data of the piezoelectric bimorph Description Symbol Value Total beam length Overhang length Width PZT-5A layer thickness Brass layer thickness PZT-5A unit mass PZT-5A Young’s modulus PZT-5A nonlinear elastic constant PZT-5A linear piezoelectric constant PZT-5A nonlinear piezoelectric constant PZT-5A dielectric constant Brass unit mass Brass Young’s modulus Linear damping coefficient Nonlinear damping coefficient
∗ .l
Unit measure
31.8 26.7 3.16 0.265
mm mm mm mm
.kg/m
.c11
0.125 7800 66
.c111
.−60
TPa
.e31
.−11.6
.C/m
.e311
.−20
.kC/m
.E33
14.6
.nF/m
.ρb
8500 100
.kg/m
.cs .b1
1.40e1
.N/m
.b2
4.00e5
.N/m
.l .b .h p .h b .ρ p
mm 3
GPa
2
2
3
GPa
2
Runge-Kutta method. As first investigation, the same beam used in [3]. It is a brassreinforced PZT-5A piezoelectric cantilever bimorph Piezo Systems Inc., (T226-A4103X) with the active layers connected in series. The physical-mechanical parameters are reported in the Table 7.1. The code has been validated by comparing the obtained coefficients of the differential system and also the frequency response curves with the results of [3]. Some preliminary simulations carried out are reported below. Figures 7.5, 7.6 show the FRCs of the tip displacement and velocity RMS, respectively for the cases of RMS amplitude acceleration at the clamp of 0.01 g and 1 g. As it can be seen from the simulations, in the case of 0.01 g, there is no presence of softening nonlinearities: the FRCs are not “inclined”. In any case, the well-known shift in frequency due to the introduction of the electrical load is observed [4]. The black arrows in the mentioned plots indicate the increasing direction of the resistive load. With increasing acceleration amplitude, a decreasing stiffness of the electroelastic model is clearly observed by means of FRCs peak at decreasing frequency, for the case of 1g (Fig. 7.6). This behavior is called more precisely softening. The plot in the Fig. 7.7 represents
7.3 Inherent Nonlinearities
109
Fig. 7.5 Simulated FRCs of tip displacement (left) and tip velocity (right) for RMS amplitude of acceleration at the clamp of 0.01 g and load resistors in the range 1 k.Ω–10 M.Ω. The black arrows indicate increasing value of load resistance
Fig. 7.6 Simulated FRCs of tip displacement (left) and tip velocity (right) for RMS amplitude of acceleration at the clamp of 1 g and load resistors in the range 1 k.Ω–10 M.Ω. The black arrows indicate increasing value of load resistance
the FRCs of the electric voltage for the case 0.01 g (left) and that for 1 g (right). As known, in general, with increasing values of resistive load R (black arrow), the electric voltage values increase. For the case of 1 g, nonlinearieties are showed with inclinations towards lower frequencies near the peak.
7.3.2 Observing Material Inherent Nonlinearities The experiments to observe the nonlinear behavior of the bimorph are presented below. The studied beam is of the same type as that used in the simulations of the previous paragraph. Only the length changes, in this case equal to 26.1 mm. In comparison with the previous case also the (linear and nonlinear) damping coefficients could be different, and potentially also the nonlinear coupling and elastic coefficients
110
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
Fig. 7.7 Simulated FRCs of the voltage for 0.01 g (left) and 1 g (right) RMS amplitude of acceleration at the clamp and load resistors in the range 1 k.Ω–10 M.Ω. The black arrows indicate increasing value of load resistance
(.c111 , e311 ). The dynamic investigation consists in performing frequency sweeps in a range straddling the resonant frequency for different acceleration levels at the clamp of the cantilever. The RMS values of tip beam velocity and output voltage are recorded. The tests are carried out for the beam in the absence and in the presence of a tip magnet. Here, for the sake of brevity, only the results with in the presence of tip magnet are reported. The considered amplitudes of acceleration are: 0.03, 0.05, 0.1, 0.3, 0.5 g have been considered as amplitude of acceleration and 1, 5, 10, 50, 100, 500 k.Ω as load resistance. To implement the acceleration signal at the clamp an electrodynamical shaker Brüel and Kjær Type 4809 has been used with a vibration control system APS Dynamics Inc VCS201, and a PA25E power amplifier. The feedback in terms of acceleration has been measured by means an accelerometer Kistler AG Type 8636C5. The tip velocity of the bimorph has been also recorded through a laser Doppler vibrometer Polytec, Inc. OFV-505 and the related controller OFV-5000. As electric load resistance a box resistors IET RS-201W has been used. The tip mass is a cubic permanent magnet K&J Magnetics, Inc. B222 with a length side of 3.18 mm and the magnetization value of 1.32 T. The Fig. 7.8 shows the experimental apparatus used in the sweep tests. The experimental results are shown below (Figs. 7.9, 7.10 and 7.11).
7.3.3 Discussion of the Results Considering the plots in the Figs. 7.9 and 7.10, a series of observations can be made. • The simulated nonlinear behavior is experimentally confirmed. At the same load resistor R, by increasing the amplitude of acceleration at the clamp, a softening behavior of the beam is observed.
7.3 Inherent Nonlinearities
111
Fig. 7.8 Experimental apparatus used for the sweep tests with indication of, (1) accelerometer, (2) clamp, (3) cantilever with a tip magnet, (4) shaker (left). Zoomed view of the stratification, adapted from [3]
Fig. 7.9 Experimental RMS voltage FRCs of the cantilever with tip mass for different level of RMS acceleration and load resistors
112
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
Fig. 7.10 Experimental RMS tip velocity FRCs of the cantilever with tip mass for different level of RMS acceleration and load resistors
Fig. 7.11 Experimental FRCs of voltage of the cantilever with tip mass for different level of acceleration and load resistors (left, adapted from [5]). FRCs for the case of R .= 500 k.Ω. The red dashed line represents the backbone curve of the system
7.3 Inherent Nonlinearities
113
Fig. 7.12 Comparison of experimental response and nonlinear numerical model for voltage FRC with R .= 100 k.Ω. The black arrow indicates increasing values of RMS acceleration at the clamp in the range [0.03–0.5] g. The grey dashed line is the linear backbone curve
• If the amplitude of acceleration increases, the output (voltage and velocity) increases due to the greater amount of energy in the mechanical system. • In the case with tip mass, for the same acceleration amplitude, the output (voltage and tip velocity) is greater than the case without tip mass (even if those results are not here reported for brevity). This fact is due to the higher inertia of the system which has the same stiffness as in the case without tip magnet but more mass. Other observations can be made by observing the Fig. 7.11. In the plot the FRCs of the system for different resistive loads R with varying input acceleration amplitude are represented. The linear nature of the backbone curve (red dashed lines) is thus confirmed by the experimental observation. Furthermore, a variation in the electrical load resistance acts as a “regularizer” of the inherent nonlinearity. Considering the represented frequency-voltage (f, V) planes, if R increases the backbone undergoes a clockwise rotation, breaking down the softening effect. The computational model represented by the system of the Eq. (3.73) has been fitted and the nonlinear parameters are exactly those found in [3], which are listed in the Table 7.1. The only exception is about the linear and nonlinear damping coefficients which are respectively b.1 = 1.7e1 N/m and b.1 = 9e5 N/m.2 . The comparison between the experimental results and the numerical simulation is shown in Fig. 7.12 for the case with R .= 100 k.Ω.
114
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
7.4 Magnetic Plucking At this point, having investigated in detail the nonlinear behavior of the single piezoelectric bimorph, the study of its interaction with a magnetic system is presented. To study the phenomenon, the concept is the same as the preliminary experiments carried out in Sect. 7.2. In this case the procedure is more controlled and the setup more advanced. The cantilever is the same considered in the frequency sweeps and it is fixed onto a linear precision positioner bolted to an optical table. In this case, the mobile system consists of a long stroke shaker (APS-113) and also the tip velocity of the cantilever has been measured in addition to the value of the electrical voltage in the range of resistors 1 k.Ω–10 M.Ω. The measurement of the velocity has been carried out with a Polytech PFV-505 laser Doppler vibrometer. The speed of the shaker has been also measured to ascertain its value with respect to the implemented signal. Also for this activity the resistors box (IET RS-201W) has been used. The considered gap distances h between the magnets are: 2.5, 3 and 3.5 mm. The whole experimental setup is shown in the Fig. 7.13. By using the long stroke shaker, the idea is to implement various harmonic monochromatic input signals at different amplitudes of velocity: 0.3, 0.4, 0.5, 0.6, 0.7 m/s. Since the interest is mainly put in low-frequency applications (e.g. wearable electronics for human motion), a fixed frequency of 3 Hz is considered for all the experiments. The aforementioned values of velocities have been implemented in such a way that their maximum value (i.e. the amplitude) is reached when the distance between the magnets is minimum. The duration of each test in time domain has been fixed to 2.5 s to collect a large number of magnetic interactions between the transducer and the moving magnet on the shaker.
Fig. 7.13 Frequency up-conversion experimental apparatus with (1) shaker, (2) linear precision positioner, (3) controller, (4) resistors box, (5) data acquisition system, (6) Zoomed view on energy harvester, (7) piezoelectric bimorph, (8) clamp
7.4 Magnetic Plucking
115
Fig. 7.14 Comparison between experiments and simulation with R.= 100 k.Ω, by using linear (left) or nonlinear (right) electroelastic model. Gap distance h .= 2.5 mm
The results are reported for a matter of brevity only for the voltage but the speeds follow a completely similar qualitative behavior. As demonstrative example, the comparison of the simulation with the experiments for the case of R .= 100 k.Ω and velocity of interaction of 0.7 m/s, h .= 2.5 mm is illustrated in the Fig. 7.14. More in detail, on the left the comparison is carried out between the experimental response and the simulation performed in linear piezoelectricity and linear damping. On the right, the comparison is carried out with the nonlinear model. The latter shows a good agreement with the experiments. The voltage values are very far from those associated with the coercive field of the PZT-5A, and it is reasonable to think that the oscillation contains the presence of inherent ferroelastic nonlinearities of the material. The plot on the left in Fig. 7.15, on the other hand, simply proposes the same nonlinear simulation compared to the experimental result over a longer time interval (2 s) and also in this case it can be seen the agreement between the simulation and the experimental result. On the right of Fig. 7.15, the validity of the model is ascertained even in the case of slow interaction (0.4 m/s). As ascertained from the studies on backbone curve behavior in the frequency-voltage plane, the nonlinearities, for the same external input, are stronger if the resistive load drops. To observe the response of the numerical model also for lower resistor than 100 k.Ω, the comparison is reported in the Fig. 7.16 also for the case of 10 k.Ω with interaction at 0.7 m/s (left) and 0.4 m/s (right). The plots in Fig. 7.17 instead, represent the experimental response of the cantilever for a fixed resistive load (1 k.Ω) and different interaction velocities: 0.3, 0.4, 0.6, 0.7 m/s. It is showed that as the amplitude of velocity increases, gradually the first mode appears. For the case of 0.3 m/s only a quasi-static snap in tension is observed: the phenomenon is too slow. Then, the first mode appears with ever increasing amplitude. It is important to underline that the input signal to the system is always at the fixed frequency of 3 Hz. What is changing is therefore the time associated with the magnetic interaction and the effect is appreciated in the Fig. 7.17.
116
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
Fig. 7.15 Comparison between experiments and nonlinear simulation of the voltage response over 2 s with R .= 100 k.Ω and amplitude of velocity equal to 0.7 m/s. Zoomed view on the interaction in case of amplitude of velocity equal to 0.4 m/s (right). Gap distance h .= 2.5 mm
Fig. 7.16 Comparison between experiments and nonlinear simulation of the voltage time histories with R .= 10 k.Ω, and amplitude of velocity equal to 0.7 m/s (left), 0.4 m/s (right), gap distance h .= 2.5 mm
Further considerations on the observed phenomena can be formulated by observing the FFTs of the system response in Fig. 7.18. Considering a fixed load resistance and velocity of the interaction (100 k.Ω, 0.7 m/s) by increasing the gap between the magnets the voltage amplitudes decrease (left). On the other hand, for a fixed value of gap distance and resistive load (2.5 mm, 100 k.Ω), if the velocity of interaction increases, the amplitude associated with the first mode of the beam increases. The latter observation is thus consistent with what has been previously found for the time histories. However, focusing, it can be seen that the peaks of the FFTs are all at 259 Hz which is the natural frequency of the beam, and there are no shifts with different velocities. By exploiting the observations made on the backbone curve illustrated in Fig. 7.11, if the resitive load is reduced to 5 k.Ω, it is possible to obtain the results of Fig. 7.19. In particular, it can be observed that with increasing velocity, a frequency shift of the peaks of the FFTs occurs. Such phenomenon is attributable to the fact
7.4 Magnetic Plucking
117
Fig. 7.17 Voltage experimental response of the cantilever at the fixed load resistance R .= 1 k.Ω and different velocities of the magnetic interaction in the range 0.3–0.7 m/s (h .= 2.5 mm)
that for higher velocities, the inertial effects on the beam are greater. In fact, since in any case the beam has to follow a space-dependent load, with increasing velocity, it will have less and less time to pass from an undeformed configuration to the one imposed by the maximum amplitude of magnetic force. The dynamical result is an increasing acceleration of the tip. These larger forces induce greater deformations which cause the nonlinear piezoelectric behavior.
7.4.1 Experimental Parametric Analysis After the observation of this phenomenon, a performance analysis of the prototype has been carried out considering the aforementioned gaps h and velocities over load resistor in the range 1–10 k.Ω. The results of this investigation are shown in the Fig. 7.20. It shows the voltage RMS, the associated power, and also the energy harvested by the system over 2.5 s of the experiment. Each surface is associated with a gap distance value equal to 2.5, 3.0 mm or 3.5 mm respectively. As expected, for increasing values of the gap distance h (black arrow in the plots) the power output
118
7 Parametric Analyses and Experiments for Nonlinear Magnetic Plucking
Fig. 7.18 Voltage FFTs with R .= 100 k.Ω for different gap distances h and amplitude of velocity fixed at 0.7 m/s (left), and for different amplitude of velocity in the range [0.3–0.7] m/s and fixed gap h .= 2.5 mm (right)
Fig. 7.19 Voltage FFTs near short circuit (R.= 5 k.Ω) for varying velocity of the shaker in the range [0.4–0.7] m/s without considering the magnetic interaction phase (left). Peaks of the aforementioned FFTs with indication of the corresponding frequencies and interaction velocities (right), adapted from [6]
decreases and it can be seen that it follows a nonlinear trend. It is also interesting to note that, in the heat map with h .= 2.5 mm (bottom right in the Fig. 7.20), the optimal load R undergoes a slight variation in relation to the considered velocity. More in detail, for very slow interaction (i.e. 0.3 m/s) higher power values can be obtained with resistors in the order of tens of k.Ω. This result reflects the absence of the first vibrational mode in the response of the structure in such condition of motion.
References
119
Fig. 7.20 RMS voltage (top left), power (top right), energy harvested over 2.5 s (bottom left), heat map of power for gap distance equal to 2.5 mm (bottom right). The black arrows indicate increasing gap distance h
References 1. Clough R, Penzien J (2003) Dynamics of structures, 3rd edn. Computer & Structures Inc., Berkeley, USA 2. https://piezo.com 3. Leadenham S, Erturk A (2015) Unified nonlinear electroelastic dynamics for a bimorph piezoelectric cantilever for energy harvesting, sensing, and actuation. Nonlinear Dyn 79:1727–1743 4. Erturk A, Inman DJ (2011) Piezoelectric energy harvesting. Wiley 5. Rosso M, Kohtanen E, Corigliano A, Ardito R, Erturk A (2023) Nonlinear phenomena in magnetic plucking of piezoelectric vibration energy harvesters. Sens Actuators A: Phys 362:114667 6. Rosso M, Kohtanen E, Corigliano A, Ardito R, Erturk A (2021) Dynamical behavior of frequency up-converted piezoelectric vibration energy harvesters at different velocities of magnetic interaction. In: Proceedings of 2022 IEEE 21th international conference on micro and nanotechnology for power generation and energy conversion applications (PowerMEMS), Salt Lake City, UT, United States of America, pp 260–263
Chapter 8
Improved Magnetic Interaction for Frequency Up-Conversion
This chapter presents a technique to improve the efficiency of the magnetic plucking in piezoelectric vibration energy harvesting by means of the manipulation of magnetic forces. First, the technique is presented through a description of the working principle from an intuitive point of view based on a literature study. Then, a computational study of the magnetic force is proposed on shielded magnets with additional ferromagnetic material according to a proposed technique. Time domain simulations are then carried out on a dynamical system composed of seismic mass and a piezoelectric oscillator to evaluate the benefit of the technique. Finally, an experimental investigation is presented on NdFeB permanent magnets, to confirm the proposed concept.
8.1 Introduction and Motivations As investigated in Chaps. 6 and 7, the velocity of interaction between the magnets plays an important role in terms of plucking phenomenon efficiency (i.e. activation of structural modes). If the velocity is very low, it is not possible to activate the desired vibrational mode of the piezoelectric structure. This is an inherent limitation of the magnetic FuC because of the space-dependent nature of the magnetic force. Such limitation drastically compromises the performance of energy harvesters at very low input velocity. In that case they only transduce the energy associated with the quasistatic voltage snap described in Chap. 7. Focusing on applications characterized by low-frequency and low-velocity amplitudes, as in the case of human motion, it is interesting to find strategies to improve the magnetic FuC. The improvement is here intended as the activation of the high frequency response of the harvester even at low velocities of interaction between PMs (less than 1 m/s). A basic solution, might be to be able to manipulate the magnetic force curve in the relative space between the magnets. The force-distance law is indeed a starting point, the positional nature then © The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5_8
121
122
8 Improved Magnetic Interaction for Frequency Up-Conversion
Fig. 8.1 Schematic of the qualitative path of the magnetic field lines around the cross-section of an inductor in absence or in presence of a MFC (left). Schematic of the proposed technique to manipulate the magnetic plucking (right). Adapted from [5]
influences the associated force-time curve through the relative motion of the moving magnet. The basic idea to manipulate the magnetic field is to exploit a magnetic flux concentrator (MFC). It is basically a piece of ferrous material, typically soft, that due to its high magnetic permeability directs the field lines in such way to follow a specific space path [1]. The field lines remain free to expand where there is not high permeability as shown in Fig. 8.1 (left) with reference to the typical cross-section of an inductor. As an example of application, this approach is useful to control the rapid temperature cycling (RTC) technologies as made by Mrozek et al. in recent times [2], or to improve the gap-to-gap induction heating of wind power gear as proposed by Wen et al. [3]. Another interesting approach to manipulate the magnetic field is the deposition via high-rate triode sputtering technique of patterned permanent magnetic thin films as made by Chigirinsky et al. [4]. Taking inspiration from these studies, a sort of concentrator on a permanent magnet instead of an inductor is here proposed. At an early stage, the concentrator, which will henceforth be referred to as a shielding, was thought to be made of soft ferromagnetic material. Actually, some proofs of attempt demonstrated on the computational side, that polarized ferromagnetic hard material (i.e. PM), accomplishes better to the demand for sharpening of the magnetic force-distance curve than soft one, like permalloy. To realize the shielding, a cubic hard permanent magnet with the magnetization parallel to its principal direction, is shielded by adding ferromagentic material with opposite poles orientation, as indicated in Fig. 8.1 (right). The shielding material is put only on the sides of the central main magnet that contains both the poles (four external surfaces of the magnet over six). An interesting point is that the technique seems to be valid if either both or only one of the involved magnet are shielded.
8.2 Computational Studies on Shielded Permanent Magnets
123
8.2 Computational Studies on Shielded Permanent Magnets The theoretical modelling of the problem is presented in Chap. 2 in the magnetostatics section. To numerically investigate the shielding technique, the magnetic force between two magnets interacting as in the schematic of Fig. 4.2 is simulated with COMSOL Multiphysics. Both, or only one shielded magnets have been considered. The main magnet of the Fig. 8.1 (right) is exactly the same studied in the Chap. 4. It is a cubic NdFeB PM with a side length of 3 mm and a magnetization equal to 1.32 T. The shielding is realized with the same material and magnetization. In the case with both shielded magnets, the simulations have been performed with the following values of shielding thickness: 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 1.0 mm. However, for conciseness, the numerical results for all thickness values are reported only for a gap distance equal to 0.5 mm. The other considered gap distances, h according with the schematic of Fig. 4.2 are: 1.0, 1.5, 2.0 mm. For the latter values, only the results for 0.5 mm and 1 mm of cover thickness are reported. In the case in which only one of the cubic PMs is shielded, just to ascertain the validity of the principle, only the shielding thickness of 1.0 mm has been considered but the considered gap distance h are the same of the previous case (0.5, 1.0, 1.5, 2.0 mm).
8.2.1 Results for the Case with Two Shielded Magnets with Hard Ferromagnetic Material In this paragraph all the results are reported for the case with both shielded magnets, and they are compared with the magnets without the shielding. According to the reference system of Fig. 4.2 the interest is put on the z-component of the magnetic force with respect to the relative distance on the same axis. The Fig. 8.2 shows the parametric analysis in the shielding thickness t (range 0.1–1.0 mm) both for . Fy and . Fz , and a gap distance equal to h .= 0.5 mm. The result shows a sharpening of the force-distance curve for increasing values of thickness. Furthermore, for increasing t, an inversion of sign arises around .± 5 mm of relative distance, and an higher value of peak force is also observed for the case of t .= 1 mm with reference to the Fig. 8.1 (right) in comparison with the absence of shielding. The latter result depends also by the gap distance h. The plots in Fig. 8.3 shows the behavior of . Fz for the considered values of gap distance h and two values of the shielding thickness (t .= 0.5, 1 mm). They are compared with the case without the concentrator. The plots show that by using the shielding on both PMs it is possible to tighten the force-distance curves. The shielding induces an inversion in sign in such way that the gradient of the force is modified, with the sharpening as result. By increasing the gap distance h, the peak force decreases in comparison with the unshielded case.
124
8 Improved Magnetic Interaction for Frequency Up-Conversion
Fig. 8.2 From left to right:. Fy and . Fz according to the schematic Fig. 4.2 for .h = 0.5 mm and varying values of cover thickness. The black line refers to the magnets without shielding. The red arrows indicate increasing value of cover thickness in the range 0.1–1 mm
Fig. 8.3 Numerical results of the comparison of . Fz between magnets with and without shielding for cover thickness equal to t .= 0.5 mm and t .= 1.0 mm, and four values of gap distance h: 0.5, 1.0, 1.5, 2.0 mm. Adapted from [5]
8.2 Computational Studies on Shielded Permanent Magnets
125
8.2.2 Results for the Case with One Shielded Magnet with Hard Ferromagnetic Material The same kind of analysis of the previous paragraph has been carried out with only one shielded magnet. In this situation only the shielding thickness t .= 1 mm has been considered. Even in this case the concept is represented: the plots in Fig. 8.4 show that also by using the shielding on only one PM it is possible to tighten the force-distance curves. The shielding induces an inversion in sign in such way that the gradient of the force is modified, with the sharpening as result. Also in this case, by increasing the gap distance h, the peak force decreases in comparison with the unshielded case. Some tests have been also carried out for the case of the magnet completely shielded except for its surface directly facing with the other one of the interacting magnet, as indicated in Fig. 8.5 (left).
Fig. 8.4 Numerical results of the comparison of . Fz between magnets with one shielded magnet and without shielding with thickness equal to t .= 1.0 mm, and four values of gap distance h: 0.5, 1.0, 1.5, 2.0 mm
126
8 Improved Magnetic Interaction for Frequency Up-Conversion
Fig. 8.5 Schematic of different strategies of shielding: only one free surface (left), lateral shielding (right), with indication of the magnetization vector .M
However, the simulations not reported here for the sake of brevity, shown that the effect is practically identical to a lateral shielding only (left side in Fig. 8.5). For this reason, in this book it is reported only the most economical case: the lateral shielding requires less material to have the same performance.
8.3 Experimental Evidence of the Phenomenon Some preliminary tests have been carried out in case of one shielded magnets with hard ferromagnetic material, and shielding thickness of 1 mm. Two values of gap distance have been considered: 1 and 1.5 mm. The experimental setup is the same described in Chap. 4. The z-component of the magnetic force is reported in Fig. 8.6. The blue dashed line refers to the numerical result for the shielded magnet, the continuous blue line its experimental result, and they are compared to the experimental result derived in [6] without shielding. The supposed principle is confirmed because by considering only the experimental results in the Fig. 8.6, the shielded layout (S) shows a sharper behavior with respect to the unshielded case (NS) in terms of force-distance curve. On the other side, the comparison between numerical results and experiments with shielding (S) shows some discrepancies in the sign inversion which may be the subject of further studies. Anyway, the physics of the phenomenon is captured as well as the peak force.
8.4 Application to Vibration Energy Harvesting In this section, the computed magnetic force with shielding is used to analyze the plucking mechanism on a PVEH. The used piezoelectric cantilever is the same of the Chap. 6, and its features can be found in the Tables 6.1, 6.2 except for the length equal to 10 mm. The interaction scheme is the same proposed in the early investigation
8.4 Application to Vibration Energy Harvesting
127
Fig. 8.6 Comparison of studied magnetic forces, S: shielding, NS: no shielding. Gap equal to 1.0 mm (left) and 1.5 mm (right)
of the previous chapter, in Fig. 7.1. The piezoelectric beam magnetically interacts with the moving magnet that is shielded in this case and controlled by means an imposed velocity. Time-domain numerical analysis are carried out with the Runge Kutta method, by considering constant velocity of the moving magnet and evaluating a single transient phenomenon of plucking. The initial and the final position of the moving magnet are chosen in such a way that they are associated with a zero interaction force between the magnets (in this specific case outside the .±20 mm range on the relative distance axis). Q .= 14 is assumed, and a load resistor of R .= 100 k.Ω is considered just to show the effect of the shielding on the performance of the PVEH. The considered constant velocities of the moving magnet are in the range 0.1–3.5 m/s. It means from typical values of human motion up to values of moving parts of machinery. The attractive configuration between the cubic interacting magnets is considered with a gap distance h .= 0.5 mm. As a first investigation, only the nonlinerity coming from the interaction has been here considered, and linear piezoelectricity is assumed as constitutive behavior. The governing differential system is represented by the Eq. (3.36) in which the external acceleration is zero but . f ext is represented by the z-component of the magnetic force (Fig. 4.2). To investigate the validity of the proposed shielding technique, the response of the dynamical system is compared for the case of magnetic force with and without the shielding. In case of shielding, the magnets are laterally covered with a thickness t .= 1 mm of NdFeB, and a central cubic magnet with a length side of 3 mm is used. In this case each magnetic system has dimensions .5 × 5 × 3 mm.3 . Without shielding, two magnets with dimensions .5 × 5 × 3 mm.3 are used to get an equivolumetric comparison. In this way the piezoelectric beams of the two cases have the same natural frequency of 366.06 Hz (at short circuit) and a dynamical comparison makes sense. The time domain numerical results are plotted in the Figs. 8.7, 8.8, 8.9 and 8.10 for the case of velocity of the moving magnet equal to 0.9 m/s. The plots represent the comparison between unshielded (left) and shielded (right) situation on the harvester for: tip displacement, voltage, instantaneous power and phase portrait in time. Two
128
8 Improved Magnetic Interaction for Frequency Up-Conversion
main observations can be made: first, by considering the plot in Fig. 8.7 it is clear that the dynamics of the first mode for the unshielded case (left) is not strongly activated, the high amplitude is related to the magnetic interaction phase, but then the high frequency oscillations are not very large in comparison to the first phase (about 500 .µm). In the case of shielding (right) large oscillations at the first vibrational mode of the piezoelectric beam are activated after the plucking phase. It means that the plucking force is more impulsive in time for this case. Second important observation is that, in the shielded situation, the oscillations are larger in value than the unshielded interaction with higher power as result, that is the ultimate goal of power harvesting. The phase portraits in Fig. 8.10 show that, even if the displacements of the tip for both cases are of the same order of magnitude (because the peak force is of the same order), the orbits describe much higher speeds for the shielded case because the sharpening in space, for the same speed of the moving magnet, results in a much faster phenomenon proving the efficiency of the approach.
Fig. 8.7 Time histories of the tip displacement of the harvester without (left) and with (right) shielding (R .= 100 k.Ω, h .= 0.5 mm, attractive configuration, velocity .= 0.9 m/s)
Fig. 8.8 Time histories of the voltage of the harvester without (left) and with (right) shielding (R 100 k.Ω, h .= 0.5 mm, attractive configuration, velocity .= 0.9 m/s)
.=
8.4 Application to Vibration Energy Harvesting
129
Fig. 8.9 Time histories of the instantaneous power of the harvester without (left) and with (right) shielding (R .= 100 k.Ω, h .= 0.5 mm, attractive configuration, velocity .= 0.9 m/s)
Fig. 8.10 Phase portrait of the tip of the piezoelectric beam without (left) and with (right) shielding (R .= 100 k.Ω, h .= 0.5 mm, attractive configuration, velocity .= 0.9 m/s)
The Fig. 8.11 summarizes the result of the analysis. On the left the involved forces in the analysis are represented. On the right side, the peak power output computed through the Joule’s Law are plotted for both cases of force. It is shown that in the colored band which refers to velocities in the range 0.1–3.1 m/s the shielded layout provides higher values. It is interesting to note how such behavior is reversed after 3.1 m/s, this may be the subject of future studies. However, the principle works for low speeds, making the technique useful, for example in wearable applications.
130
8 Improved Magnetic Interaction for Frequency Up-Conversion
Fig. 8.11 From left to right:. Fz magnetic force with (1 mm thick) and without shielding, peak power for varying velocity of the seismic system associate to the harvester with and without shielding (R .= 100 k.Ω, h .= 0.5 mm, repulsive configuration). Adapted from [5]
References 1. Dell’Universitá G (2011) Development of numerical procedures for the simulation of induction heat treatments on large-scale artifacts with predominantly axial development, (in Italian). PhD thesis, Universitá degli Studi di Napoli Federico II, Napoli 2. Mrozek K, Muszy´nski P, Poszwa P (2021) Application of magnetic concentrator for improvement in rapid temperature cycling technology. Polymers 13(91) 3. Wen H, Zhang X, Ye H, Han Y (2021) Research on the mechanism of magnetic flux concentrator in the gap-to-gap induction heating of wind power gear. Polymers 13(91) 4. Chigirinsky S, Kustov M, Dempsey N, Ndao C, Greichishkin R (2009) Calculations and measurements of the magnetic field of patternedpermanent magnetic films for lab-on-chip applications. Rev Adv Mater Sci 20:85–91 5. Rosso M, Perli FP, Corigliano A, Ardito R (2023) On the manipulation of the magnetic forces for improving the contactless plucking in piezoelectric vibration energy harvesters. Mater Res Proc 26:685–690 6. Rosso M, Corigliano A, Ardito R (2022) Numerical and experimental evaluation of the magnetic interaction for frequency up-conversion in piezoelectric vibration energy harvesters. Meccanica 57:1139–1154
Conclusions
This book dealt with the study of piezoelectric vibration-based energy harvesters. Such technology is a promising solution for autonomous, wireless, and battery-less next-generation sensors. The aim is to monitor structures, mechanical systems, and human motion for one of the paradigms of our times: the Internet of Things (IoT). The piezoelectric mechanism was chosen because it has a higher energy density than electromagnetic and capacitive transduction mechanisms. The focus was mainly on the magnetic plucking as a frequency up-conversion solution to overcome the frequency mismatch, typical of energy harvesters with respect to the environmental context in which they operate. This choice is mainly justified by the fact that it is contactless and prevents the brittle piezoelectric material from damaging. The presented studies confirm that magnetic interaction between permanent magnets is an excellent strategy for generating broadband or frequency up-converted piezoelectric vibration energy harvesters. However, it must be used with awareness; in fact, the space-dependent nature of the magnetic force makes it particularly efficient as a frequency conversion pathway only if the relative velocities between the magnets are sufficiently high. Otherwise, the harvester can still have a broadband response due to quasi-static interactions that deform the transducer but without activation of the structural mode. In cases in which the design circumstances do not allow fixing the magnetization for having an efficient magnetic plucking, the mixed frequency up-conversion technique can be used, in which the magnetic plucking with indirect impacts between a moving mass and the package of the harvester are combined. A further strategy, to overcome the limitation linked to the velocity has been proposed by means of a sort of flux concentrator on the permanent magnets. The ferromagnetic shielding is used to manipulate the field lines and to make the force-distance curve as sharp as possible. Such a tecnhinque could also be applied in different context of energy harvesting, such as actuation and sensing. From the modelling point of view, the lumped-parameter approach is very reliable even in the case of several nonlinearities in the problem (i.e., intentional and material inherent). To model the magnetic force, the analytical formula by Akoun and Yonnet should be
© The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5
131
132
Conclusions
preferred to the other approaches. In fact, it matches very well with numerical finiteelement simulations and experimental tests but it requires negligible computing time. Inherent material nonlinearities should be considered in the modelling of harvesters subjected to the magnetic plucking phenomenon. In fact, when the magnetic force is high enough, even if the piezoelectric material works far from coercive electric field values, ferroelastic nonlinearities arise, leading to the softening of the transducer. By taking this phenomenon into account and appropriately calibrating the used constitutive model, it is possible to obtain very accurate numerical simulations in the time domain with a low computational burden. The implementation of the frequency up-conversion at the microscale, via deposition of magnetic materials could be interesting to drastically improve the performance of MEMS energy harvesters. Other systems could be investigated in the future to improve the magnetic plucking such as combining permanent magnets with multistable systems that suddenly release stored strain energy in the form of kinetic energy.
Index
A Analytical formulas, 64, 69, 131
B Backbone curves, 37, 59, 62, 107, 112, 113, 115, 116 Bistable system, 10, 15, 81 Broadband, 8, 13, 15, 17, 18, 93, 101, 131
C Coupled oscillators, 15, 54, 76
E Electromechanical modeling, 16, 54, 59 Energy harvesting, 1, 3, 10, 11, 14, 34–37, 45, 63, 75, 100, 131 Equations of motion, 36, 50, 52–54, 58, 61 Experimental analysis, 67, 91, 95, 96, 98, 100, 101, 103, 117
F Finite element analysis, 69 Free-fall mechanism, 75, 81–83 Frequency response, 55, 108, 121 Frequency response curves, 108 Frequency up-conversion, 11, 12, 15, 17, 63, 75, 80, 114, 131, 132
H Human motion, 6, 78, 91, 95, 114, 121, 127, 131 Hybrid mechanism, 93
I Impulsive load, 78, 128 Indirect impacts, 11, 12, 91, 93, 95, 96, 98– 101, 131 Inherent nonlinearities, 34, 58, 101, 102, 107, 109, 113 Intentional nonlinearity, 13
L Linear dynamics, 6 Linear systems, 6, 8, 9, 11, 13, 14 Low velocity interaction, 101 Lumped parameters, 7, 45, 46, 48, 63
M Magnetic forces, 15, 16, 40, 42, 63–65, 68, 75, 76, 78, 82, 83, 92, 93, 100–102, 104, 106, 107, 117, 121–123, 126, 127, 131, 132 Magnetic frequency up-conversion, 17 Magnetic plucking, 15–17, 76, 82, 85, 88, 91, 95, 96, 99–102, 106, 107, 121, 122, 131, 132 Magnetic shielding, 122, 123, 125–127 Magnetostatics, 37, 40–42, 68, 123 Micro-Electro-Mechanical-Systems (MEMS), 1–4, 6–10, 13, 15, 17, 132 Monostable system, 81 Multiphysics, 50, 67, 123 Multiphysics systems, 46
N Nonconservative systems, 45, 58, 60 Nonlinear dynamics, 10, 82, 101
© The Author(s), under exclusive license to Springer Nature Switzerland AG 2024 M. Rosso, Intentional and Inherent Nonlinearities in Piezoelectric Energy Harvesting, PoliMI SpringerBriefs, https://doi.org/10.1007/978-3-031-51046-5
133
134 Nonlinear modeling, 30 Nonlinear systems, 10 Numerical simulations, 37, 77, 81, 84, 104, 107, 113, 132
Index R Resonance, 5–9, 13–15, 48, 78, 96
S Structural modeling, 46, 47, 56 P Permanent magnets, 38, 40, 42, 63, 64, 68, 82, 92, 94, 101, 102, 110, 122, 123, 131, 132 Phase portraits, 85, 87, 127, 128 Piezoelectric energy harvesting, 75, 93, 121 Piezoelectricity, 27, 28, 30–32, 34–36, 45, 54, 58, 104, 115, 127 Prototyping, 96
T Time-domain analysis, 75 Time-domain response, 84
V Vibrations, 1, 3, 5, 8–12, 14–16, 45, 46, 48, 54, 63, 75, 76, 78, 85, 87, 91–93, 102, 104, 110, 131